
A Neural Network Approach towards Generalized Resistive Switching Modelling


Abstract
:1. Introduction
2. Materials and Methods
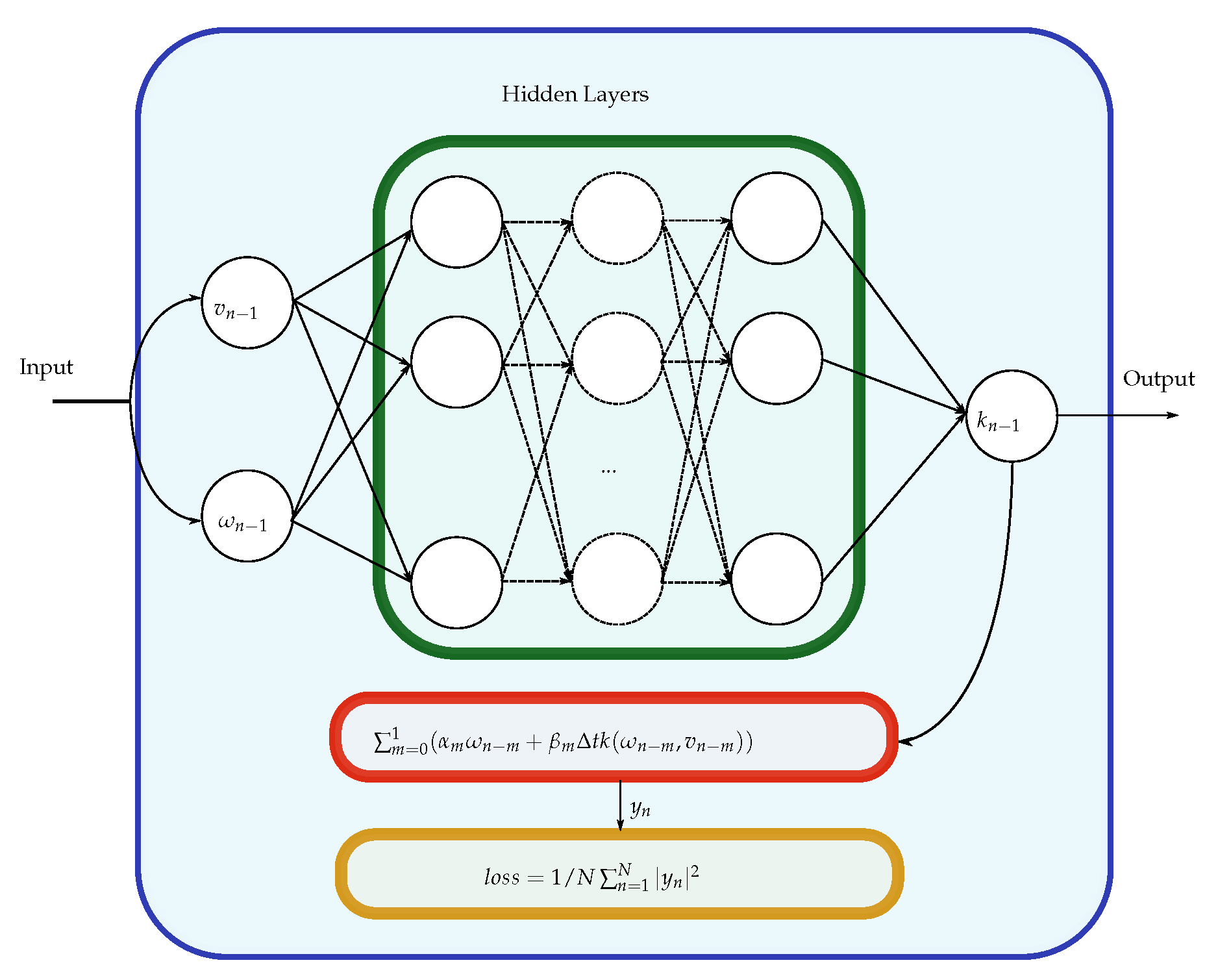
2.1. Modelling of Memristor Dynamics with Neural Networks
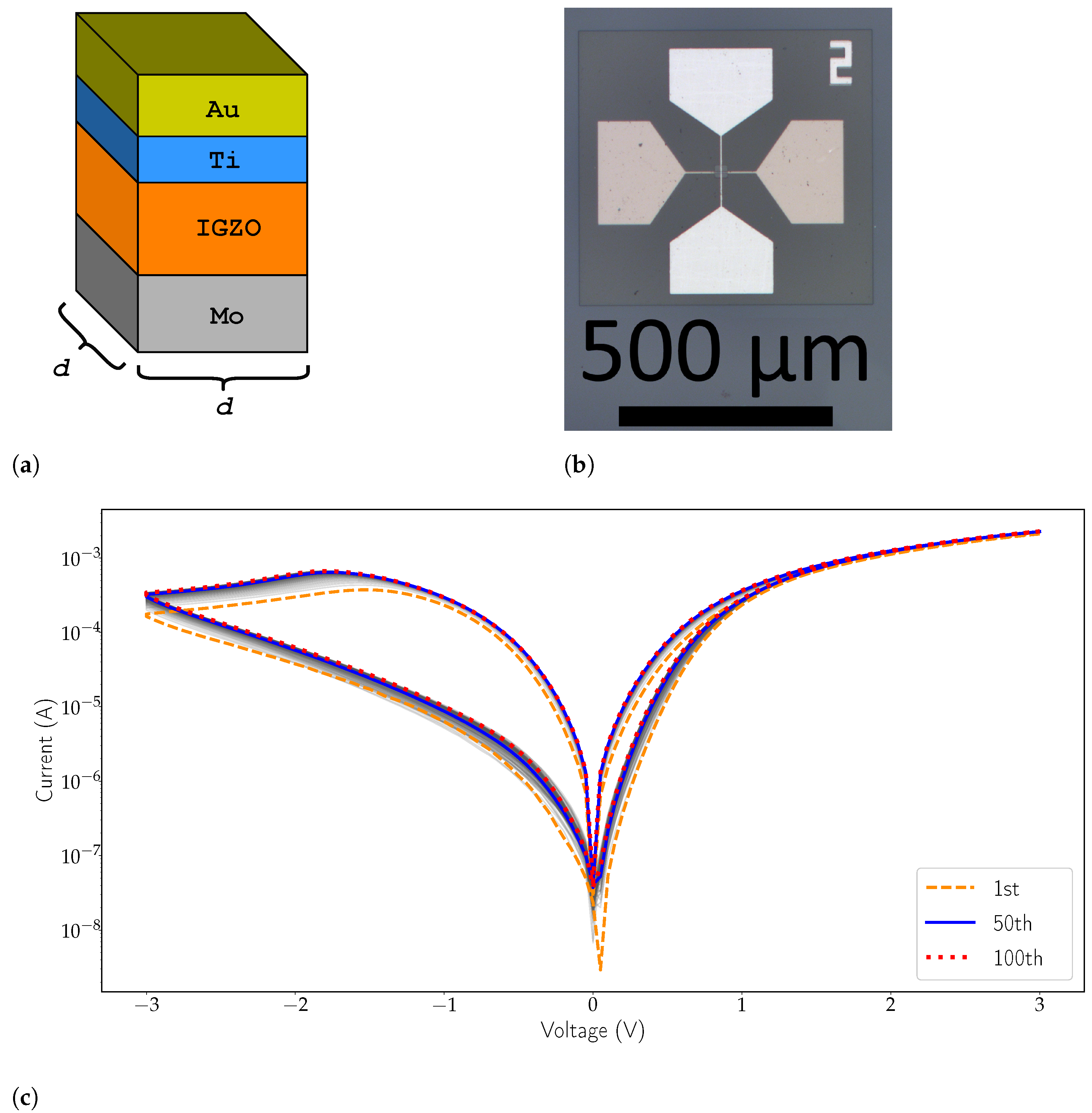
2.2. Fabricated Devices
2.3. Data Sourcing and Measuring Instrument
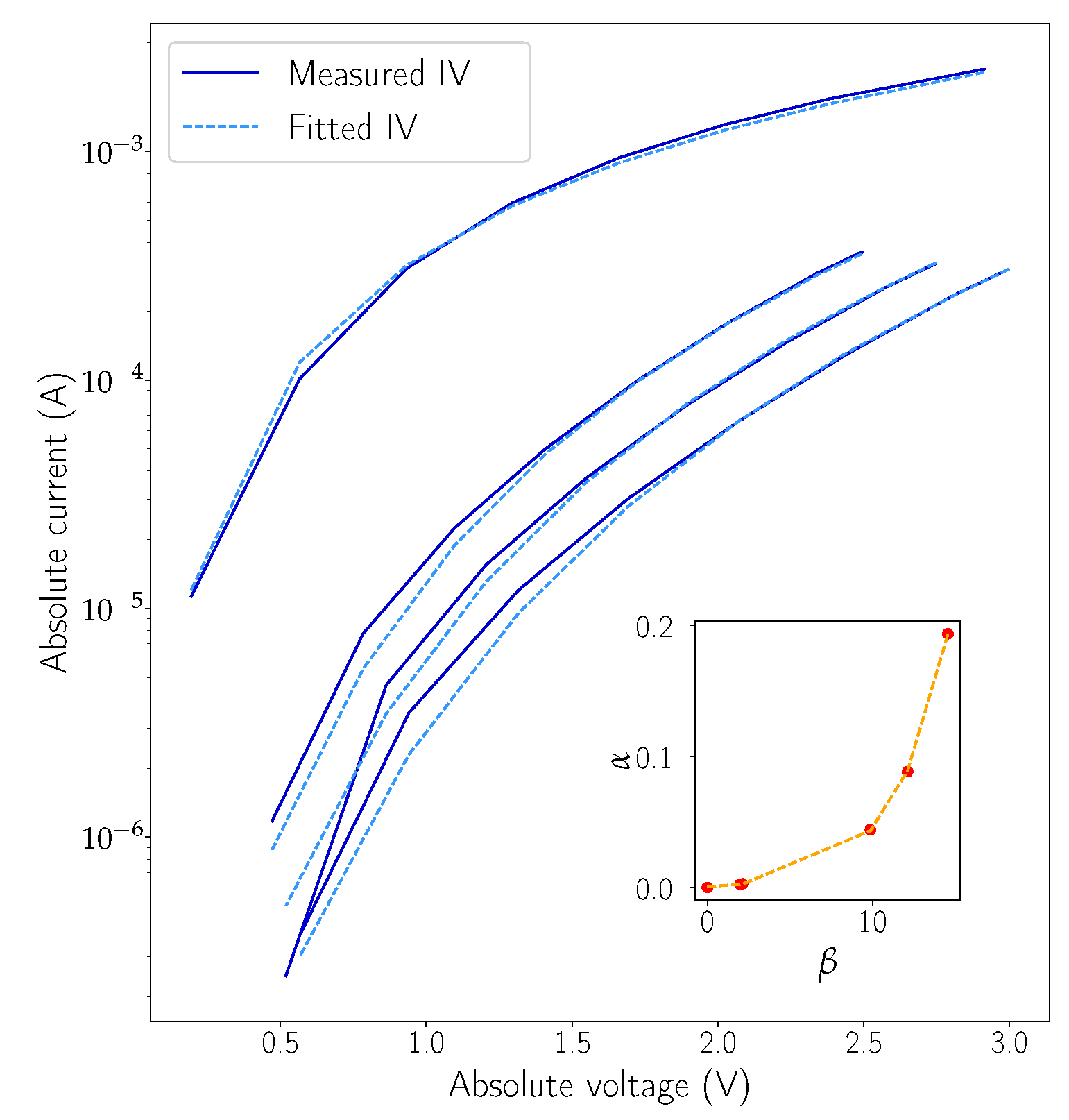
2.4. Static IGZO Memristor Equation
3. Results and Discussion
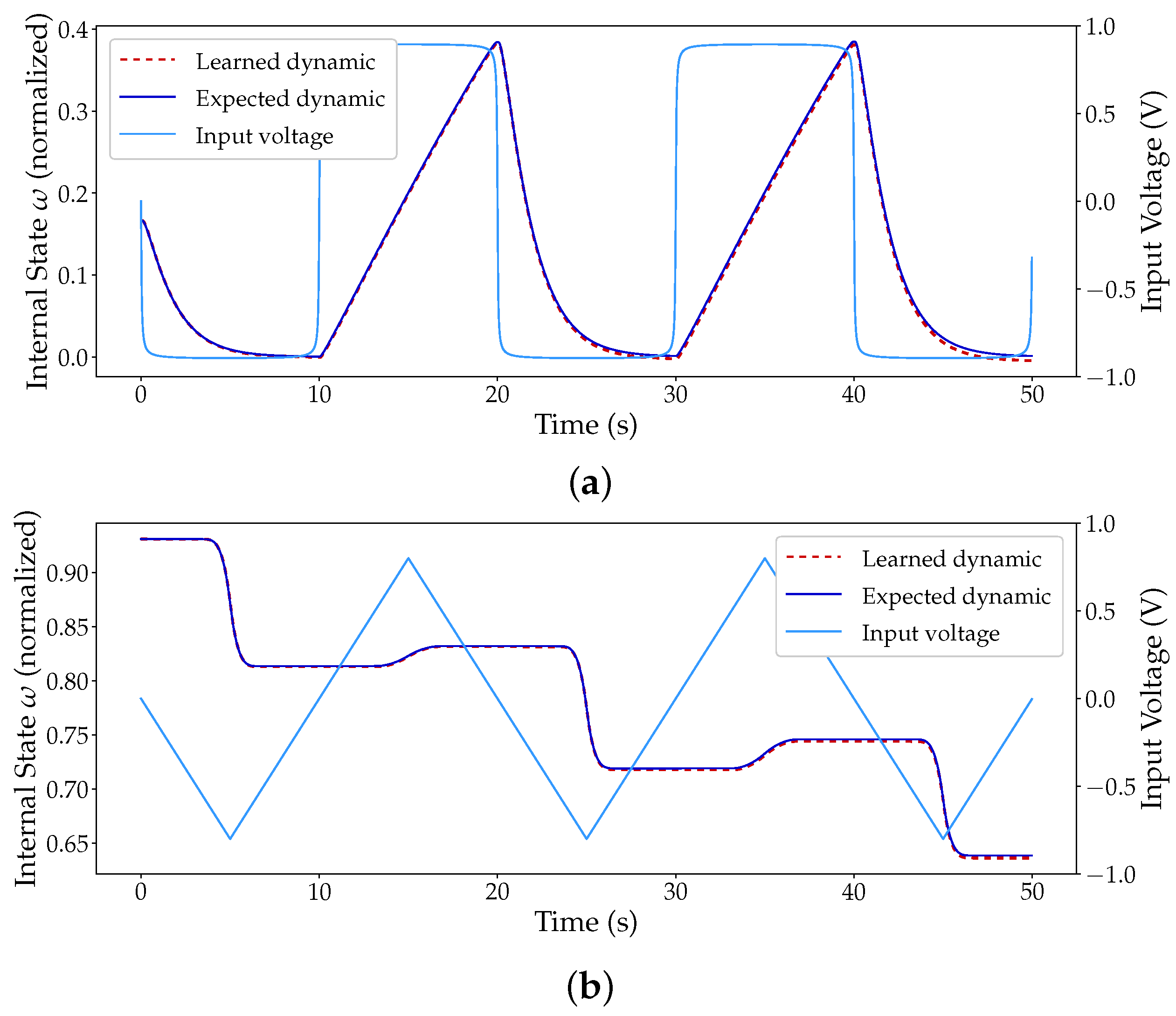
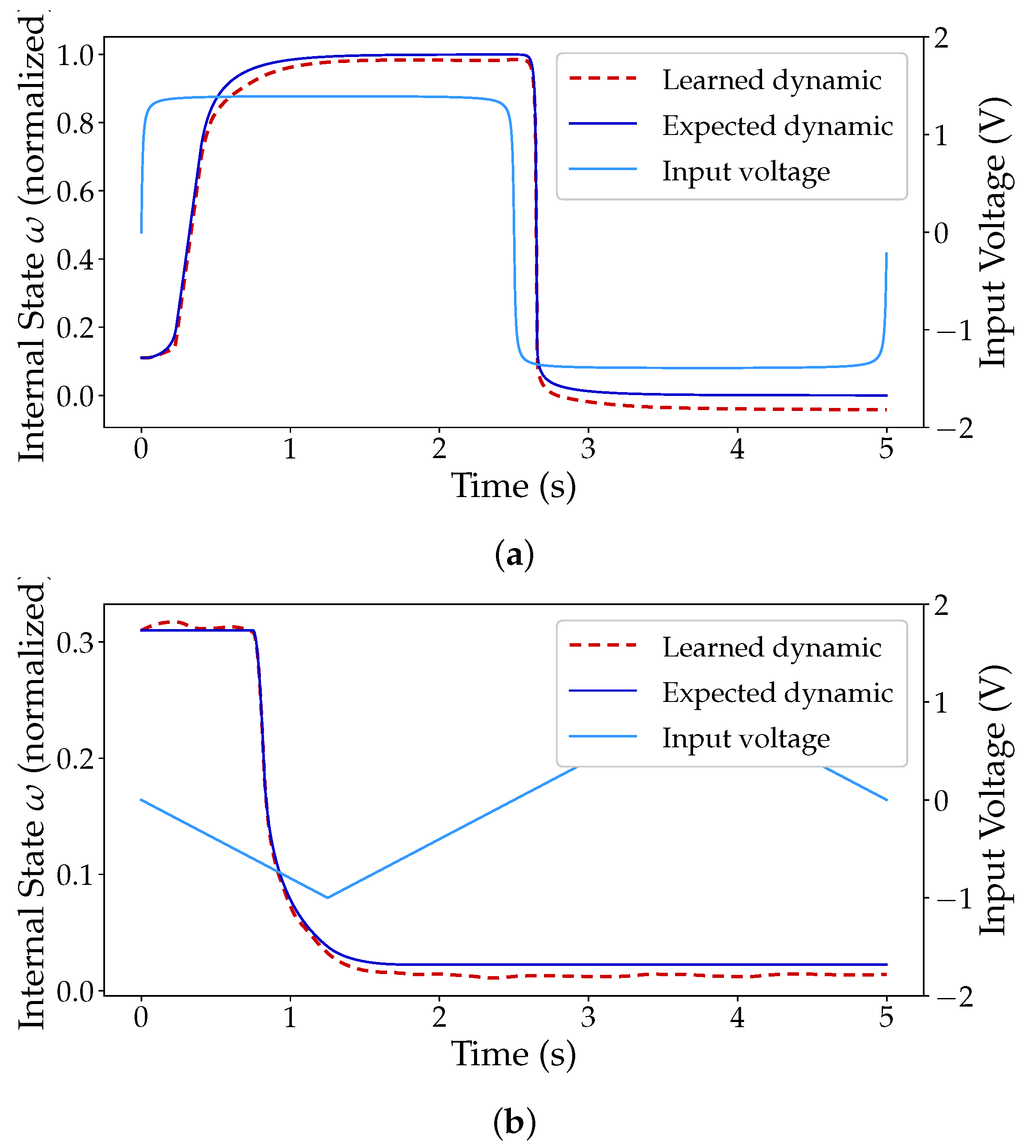
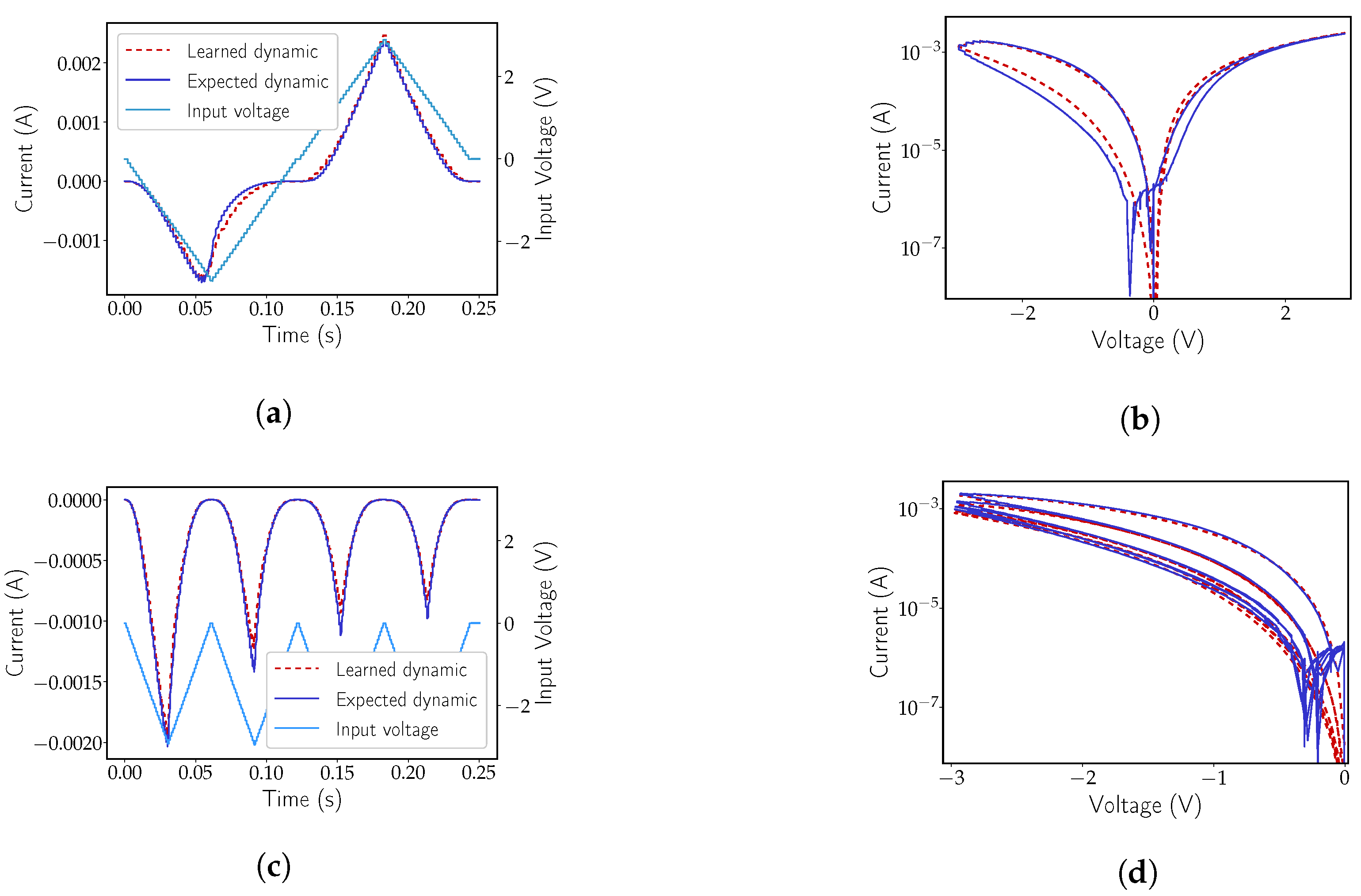
3.1. Learning of a Simulated Device
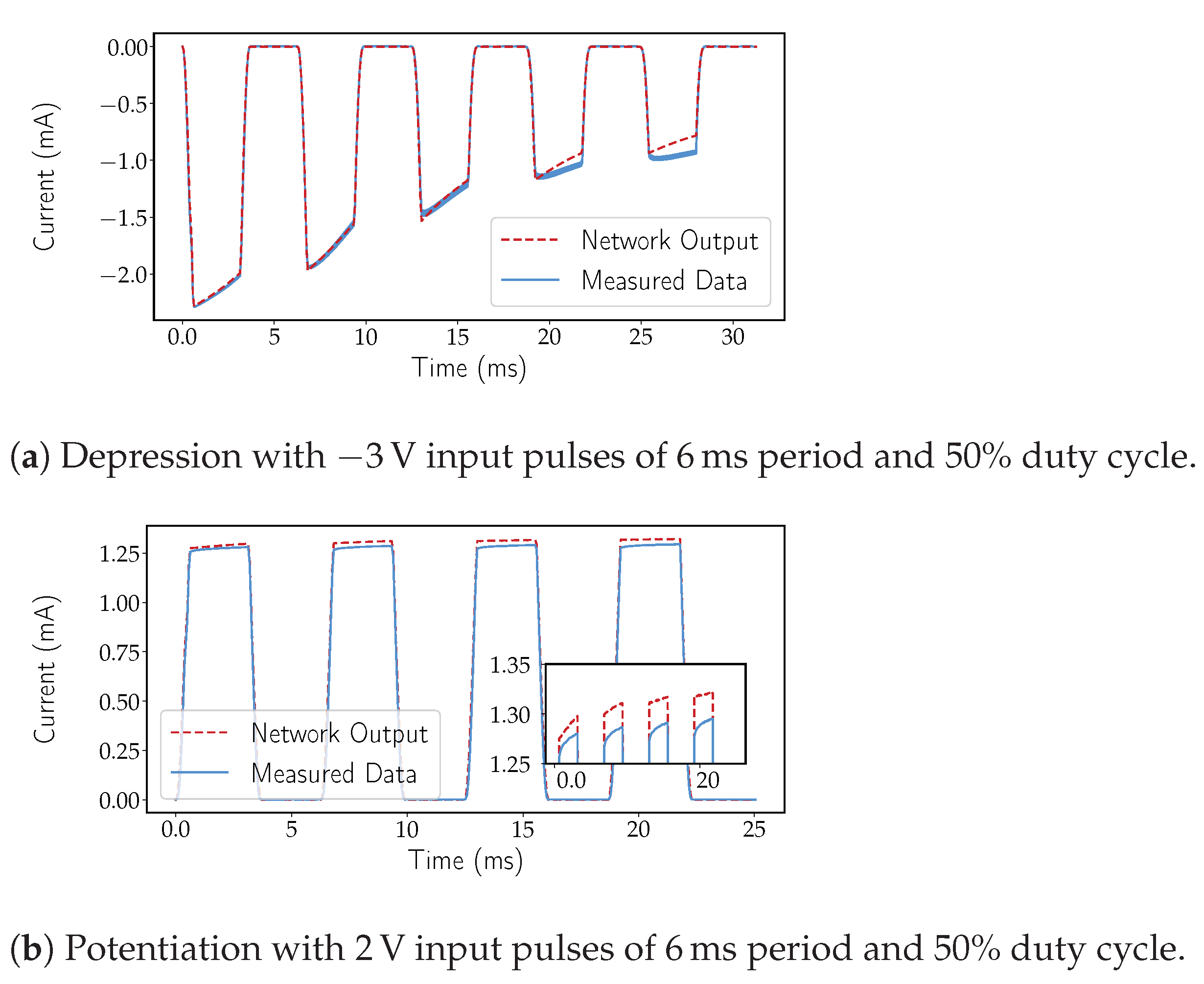
3.2. Learning of an Amorphous IGZO Device
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hickmott, T. Low-frequency negative resistance in thin anodic oxide films. J. Appl. Phys. 1962, 33, 2669–2682. [Google Scholar] [CrossRef]
- Shi, L.; Zheng, G.; Tian, B.; Dkhil, B.; Duan, C. Research progress on solutions to the sneak path issue in memristor crossbar arrays. Nanoscale Adv. 2020, 2, 1811–1827. [Google Scholar] [CrossRef]
- Shen, W.W.; Chen, K.N. Three-dimensional integrated circuit (3D IC) key technology: Through-silicon via (TSV). Nanoscale Res. Lett. 2017, 12, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shulaker, M.M.; Hills, G.; Park, R.S.; Howe, R.T.; Saraswat, K.; Wong, H.S.P.; Mitra, S. Three-dimensional integration of nanotechnologies for computing and data storage on a single chip. Nature 2017, 547, 74–78. [Google Scholar] [CrossRef]
- Ho, C.; Chang, S.C.; Huang, C.Y.; Chuang, Y.C.; Lim, S.F.; Hsieh, M.H.; Chang, S.C.; Liao, H.H. Integrated HfO 2-RRAM to achieve highly reliable, greener, faster, cost-effective, and scaled devices. In Proceedings of the 2017 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 2–6 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 2–6. [Google Scholar]
- Chua, L.O.; Kang, S.M. Memristive devices and systems. Proc. IEEE 1976, 64, 209–223. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Joglekar, Y.N.; Wolf, S.J. The elusive memristor: Properties of basic electrical circuits. Eur. J. Phys. 2009, 30, 661. [Google Scholar] [CrossRef] [Green Version]
- Biolek, Z.; Biolek, D.; Biolkova, V. SPICE Model of Memristor with Nonlinear Dopant Drift. Radioengineering 2009, 18, 210–214. [Google Scholar]
- Prodromakis, T.; Peh, B.P.; Papavassiliou, C.; Toumazou, C. A versatile memristor model with nonlinear dopant kinetics. IEEE Trans. Electron Devices 2011, 58, 3099–3105. [Google Scholar] [CrossRef]
- Pickett, M.D.; Strukov, D.B.; Borghetti, J.L.; Yang, J.J.; Snider, G.S.; Stewart, D.R.; Williams, R.S. Switching dynamics in titanium dioxide memristive devices. J. Appl. Phys. 2009, 106, 074508. [Google Scholar] [CrossRef]
- Yakopcic, C.; Taha, T.M.; Subramanyam, G.; Pino, R.E.; Rogers, S. A memristor device model. IEEE Electron Device Lett. 2011, 32, 1436–1438. [Google Scholar] [CrossRef]
- Guo, T.; Sun, B.; Zhou, Y.; Zhao, H.; Lei, M.; Zhao, Y. Overwhelming coexistence of negative differential resistance effect and RRAM. Phys. Chem. Chem. Phys. 2018, 20, 20635–20640. [Google Scholar] [CrossRef] [PubMed]
- Naous, R.; Al-Shedivat, M.; Salama, K.N. Stochasticity modeling in memristors. IEEE Trans. Nanotechnol. 2015, 15, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Kvatinsky, S.; Friedman, E.G.; Kolodny, A.; Weiser, U.C. TEAM: Threshold adaptive memristor model. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 60, 211–221. [Google Scholar] [CrossRef]
- Kvatinsky, S.; Ramadan, M.; Friedman, E.G.; Kolodny, A. VTEAM: A general model for voltage-controlled memristors. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 786–790. [Google Scholar] [CrossRef]
- Messaris, I.; Serb, A.; Stathopoulos, S.; Khiat, A.; Nikolaidis, S.; Prodromakis, T. A data-driven verilog-a reram model. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2018, 37, 3151–3162. [Google Scholar] [CrossRef]
- Silva, C.; Martins, J.; Deuermeier, J.; Pereira, M.E.; Rovisco, A.; Barquinha, P.; Goes, J.; Martins, R.; Fortunato, E.; Kiazadeh, A. Towards Sustainable Crossbar Artificial Synapses with Zinc-Tin Oxide. Electron. Mater. 2021, 2, 105–115. [Google Scholar] [CrossRef]
- Pereira, M.; Deuermeier, J.; Nogueira, R.; Carvalho, P.A.; Martins, R.; Fortunato, E.; Kiazadeh, A. Noble-Metal-Free Memristive Devices Based on IGZO for Neuromorphic Applications. Adv. Electron. Mater. 2020, 6, 2000242. [Google Scholar] [CrossRef]
- Chai, Z.; Freitas, P.; Zhang, W.; Hatem, F.; Zhang, J.F.; Marsland, J.; Govoreanu, B.; Goux, L.; Kar, G.S. Impact of RTN on pattern recognition accuracy of RRAM-based synaptic neural network. IEEE Electron. Device Lett. 2018, 39, 1652–1655. [Google Scholar] [CrossRef] [Green Version]
- Dong, S.; Wang, P.; Abbas, K. A survey on deep learning and its applications. Comput. Sci. Rev. 2021, 40, 100379. [Google Scholar] [CrossRef]
- Bahubalindruni, G.; Tavares, V.G.; Barquinha, P.; Duarte, C.; Martins, R.; Fortunato, E.; de Oliveira, P.G. Basic analog circuits with a-GIZO thin-film transistors: Modeling and simulation. In Proceedings of the 2012 International Conference on Synthesis, Modeling, Analysis and Simulation Methods and Applications to Circuit Design (SMACD), Seville, Spain, 19–21 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 261–264. [Google Scholar]
- Gambuzza, L.V.; Samardzic, N.; Dautovic, S.; Xibilia, M.G.; Graziani, S.; Fortuna, L.; Stojanovic, G.; Frasca, M. A data driven model of TiO2 printed memristors. In Proceedings of the 2013 8th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 28–30 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Pershin, Y.V.; Di Ventra, M. On the validity of memristor modeling in the neural network literature. Neural Netw. 2020, 121, 52–56. [Google Scholar] [CrossRef] [PubMed]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Multistep neural networks for data-driven discovery of nonlinear dynamical systems. arXiv 2018, arXiv:1801.01236. [Google Scholar]
- Padovani, F.; Stratton, R. Field and thermionic-field emission in Schottky barriers. Solid-State Electron. 1966, 9, 695–707. [Google Scholar] [CrossRef]
- Yalon, E.; Gavrilov, A.; Cohen, S.; Mistele, D.; Meyler, B.; Salzman, J.; Ritter, D. Resistive Switching in HfO2 Probed by a Metal–Insulator–Semiconductor Bipolar Transistor. IEEE Electron. Device Lett. 2011, 33, 11–13. [Google Scholar] [CrossRef]
- Yang, J.J.; Pickett, M.D.; Li, X.; Ohlberg, D.A.; Stewart, D.R.; Williams, R.S. Memristive switching mechanism for metal/oxide/metal nanodevices. Nat. Nanotechnol. 2008, 3, 429–433. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hidden Layers | Neurons per Layer | |||
|---|---|---|---|---|
| 15 | 30 | 50 | 100 | |
| 1 | - | 52.5 × 10−3 | 12.1 × 10−3 | 27.4 × 10−3 |
| 2 | 9.18 × 10−3 | 7.46 × 10−3 | 5.66 × 10−3 | 5.00 × 10−3 |
| 3 | 19.6 × 10−3 | 5.36 × 10−3 | 4.63 × 10−3 | 7.21 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carvalho, G.; Pereira, M.; Kiazadeh, A.; Tavares, V.G. A Neural Network Approach towards Generalized Resistive Switching Modelling. Micromachines 2021, 12, 1132. https://doi.org/10.3390/mi12091132
Carvalho G, Pereira M, Kiazadeh A, Tavares VG. A Neural Network Approach towards Generalized Resistive Switching Modelling. Micromachines. 2021; 12(9):1132. https://doi.org/10.3390/mi12091132
Chicago/Turabian StyleCarvalho, Guilherme, Maria Pereira, Asal Kiazadeh, and Vítor Grade Tavares. 2021. "A Neural Network Approach towards Generalized Resistive Switching Modelling" Micromachines 12, no. 9: 1132. https://doi.org/10.3390/mi12091132