1. Introduction
The aero-engine is the heart of an aircraft [
1]. In the process of aero-engine development, temperature is an important parameter for performance analysis, design verification and improvement, and flow heat transfer analysis [
2]. The aero-engine is characterized by high temperature, high pressure, high speed, complex internal flow, complex structure, small space, etc., so temperature measurement under such working conditions has always been a hot issue in aviation test and test technology, and also one of the difficulties in aero-engine test technology [
3]. In view of the complex environment inside the aero-engine, researchers have tried temperature measurement technology based on various principles.
Thin film thermocouple, radiation temperature sensing, and temperature indicator paint are the main temperature measurement methods used in aero-engines at present [
4,
5,
6,
7,
8]. The thin film thermocouple designed in literature [
4] basically eliminates the influence of embedded thermocouple on the measured temperature field. However, the thin film thermocouple is not suitable for large-scale installation due to a lead line problem, especially for the temperature measurement of high-temperature rotating parts of engines (such as turbine blades). In the literature [
5,
6], the temperature measuring crystal has characteristics of small size and no lead line, but it can only test the highest temperature in the transformation process, and cannot be applied to real-time temperature monitoring. [
7,
8] designed the thermopaint temperature measuring method, which is a non-interference temperature measurement method. As a functional paint whose color changes with temperature, thermopaint has the advantages of not destroying the target structure, not affecting the target temperature field, and intuitionistic results. While the measurement characteristics of thermopaint offer convenience, they also bring corresponding limitations. The temperature value needs to be read by color comparison, so the subjective error is large, and the irreversible thermopaint cannot be used repeatedly, but can only measure the maximum temperature of the target, which is difficult to meet the requirements of real-time and accurate temperature measurement.
Wireless passive sensing technology has incomparable advantages in obtaining temperature parameters in harsh environments, which has attracted the attention of researchers. Wireless passive temperature measurement technology mainly includes four kinds: surface acoustic wave (SAW), sensitive capacitance and inductance (LC) resonant mutual inductance coupling technology, optical fiber technology, and microwave backscattering technology [
9,
10]. The SAW sensor offers the advantages of simple structure, small volume, and long transmission distance, but is limited by substrate material instability at high temperatures, making it is easy for the test signal to be interfered by the environment [
11]. The LC resonant sensor adopts near-field coupling technology, which has great advantages for short distance signal transmission, but its operating frequency is low, so it cannot be attached to the metal surface [
12,
13]. In addition to the advantages of wide temperature measuring range, high sensitivity, and good electromagnetic insulation, the optical fiber temperature sensor is mainly characterized by a temperature measuring probe with an optical fiber. As a small probe needs to be placed under high temperature and high speed gas flow for contact measurement, a large number of experiments are needed for verification and assessment. The microwave scattering temperature sensor has high working frequency, small structure size, and high quality factor (Q), which has little influence on its interference in the background metal environment, and can realize data reading and energy transmission in long distances under harsh environments [
14,
15,
16].
The substrate integrated waveguide (SIW) is a new kind of waveguide structure that can be integrated into a dielectric substrate. Its propagation characteristics are similar to those of rectangular metal waveguides, so the microwave millimeter-wave components and subsystems composed of them have the advantages of high Q value, low radiation loss, strong anti-interference, etc. [
9]. As a new type of structural ceramic material, Si
3N
4 ceramics has the advantages of higher strength, better high temperature resistance, small thermal expansion coefficient, not easy to generate thermal stress, high temperature creep resistance, and other advantages, showing great application potential in high temperature structural materials such as engines [
17].
In this paper, a new type of wireless passive high temperature sensor based on CSRR-SICW and high temperature resistant Si3N4 ceramics is designed. The microwave scattering technology is used to realize the remote signal monitoring, which solves the problem of the traditional wired sensor transmission line being damaged under high temperatures. A new type of high temperature resistant structural ceramic (Si3N4 ceramics) was used as the substrate material of the sensor to realize temperature measurement in the range of 25–1000 °C. The complementary split ring resonator and the substrate integrated circular waveguide (CSRR-SICW) structure were used to improve the sensitivity of the sensor and expand the application of the traditional sensor in a polymetallic environment.
2. Working Principle and Structure Analysis
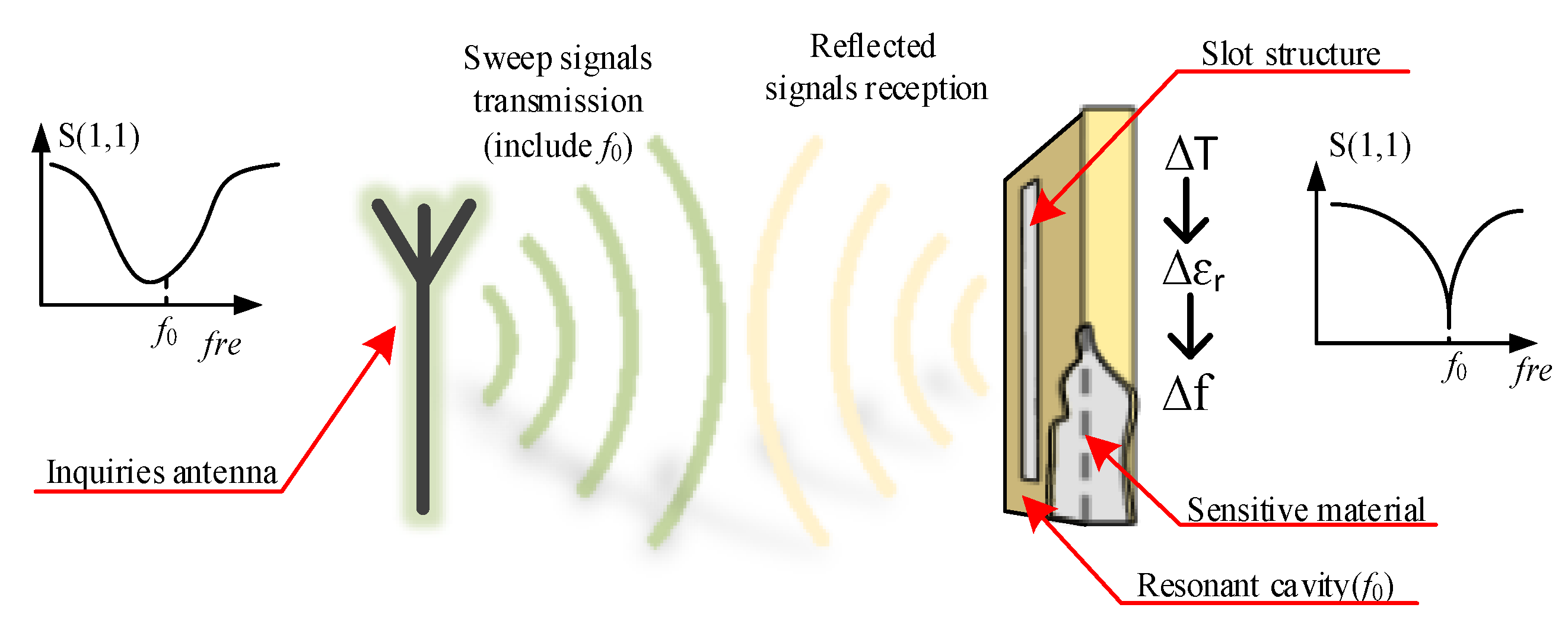
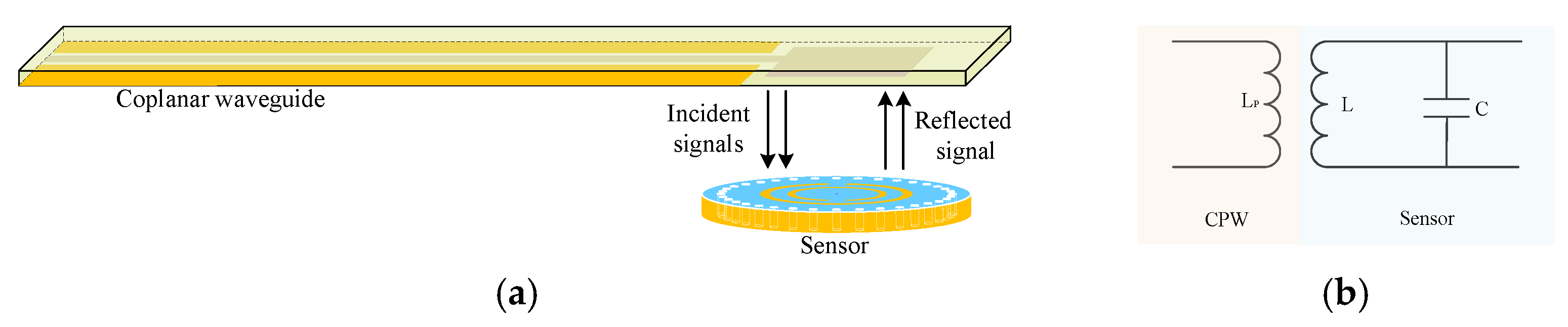
The measurement principle of wireless passive high temperature parameters based on microwave scattering technology is shown in
Figure 1. The system is composed of two parts: an inquiry antenna and a high temperature sensor. The inquiry antenna sends out a sweep signal including the resonant frequency
f0 of the resonant cavity to the temperature sensor which is integrated with the slot antenna and the resonant cavity, the sensor through the slot antenna structure to the incoming signal coupling into the cavity. Among them, only the signal of frequency component
f0 can oscillate inside the sensor and be attenuated gradually, while the other frequency signals are reflected back to the inquiry antenna. When the ambient temperature changes, the dielectric constant of the resonant cavity material changes accordingly, which affects the resonant frequency of the resonant cavity. The resonant frequency of the sensor under different ambient temperatures can be obtained by measuring the return loss of the reflected signal of the sensor received by the inquiry antenna, namely the S(1,1) parameter, and the temperature of the measured environment can be calculated according to the variation of the resonant frequency of the sensor.
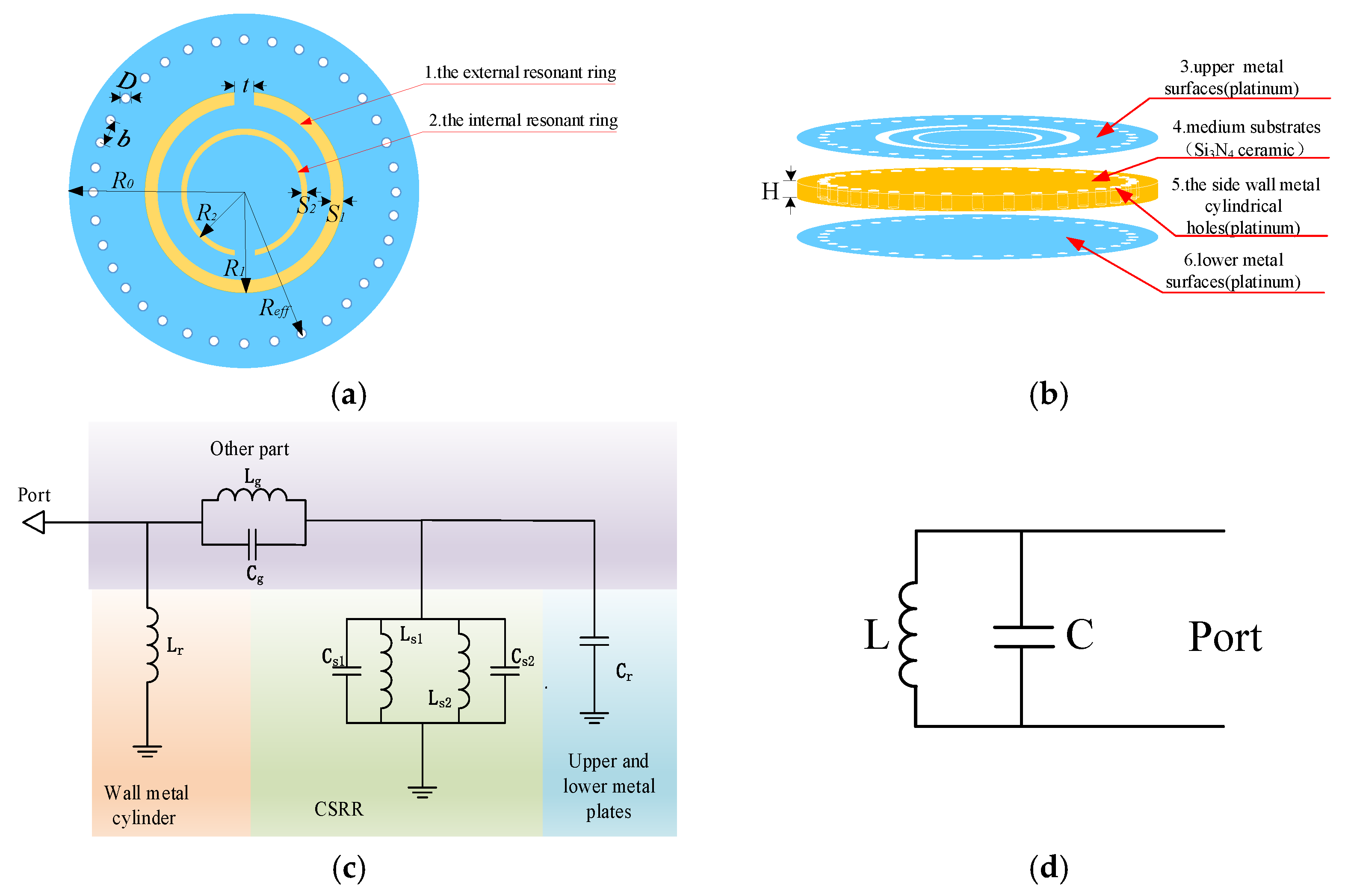
As shown in
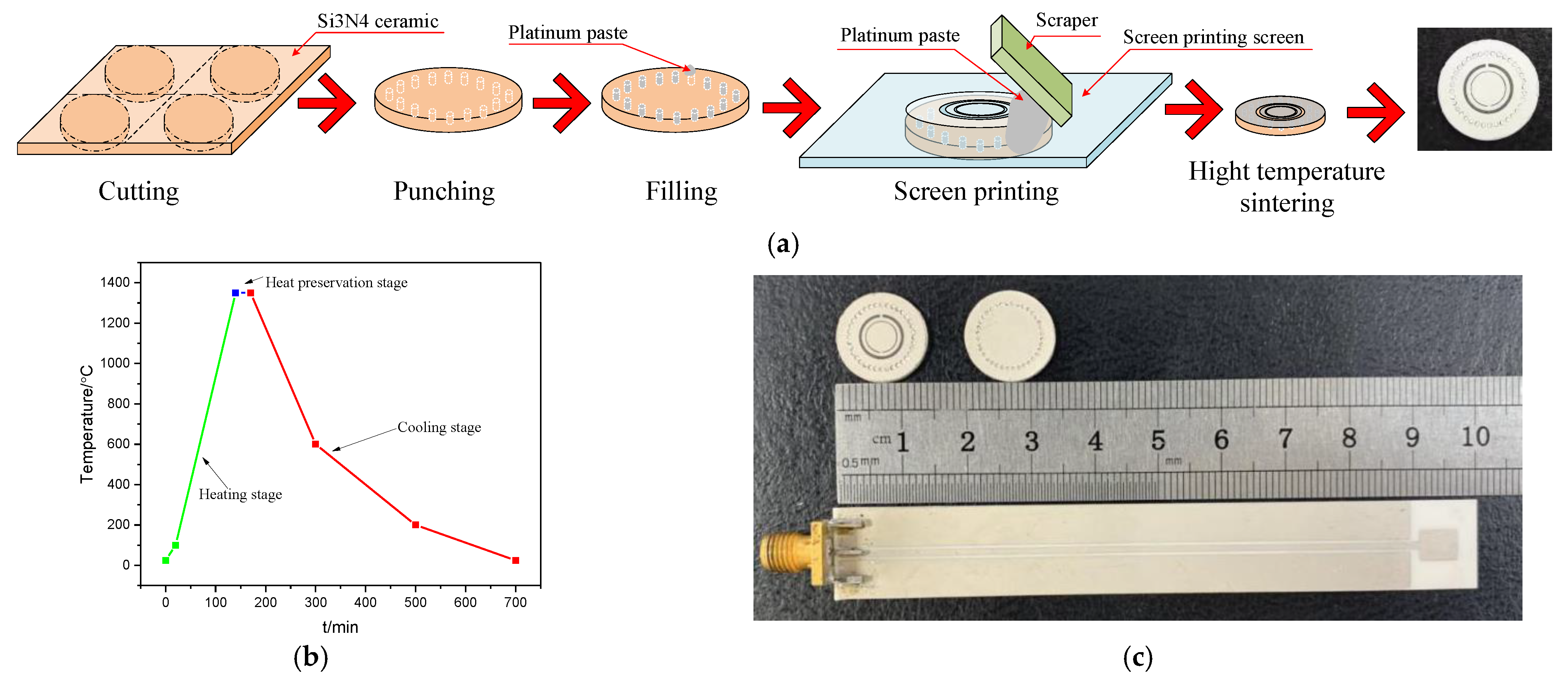
Figure 2a,b, the temperature sensor consists of an SICW resonator and a CSRR structure. The SICW resonator consists of four parts: medium substrate, upper and lower metal surface, and side wall metal cylinder. The medium material of the sensor is high temperature resistant Si
3N
4 ceramics. The upper and lower surfaces of the dielectric substrate are covered with a metal platinum paste, and the metal cylindrical through holes in the side walls are connected with the upper and lower metal surfaces. By achieving a metallization aperture, a dielectric substrate can realize the structure of the waveguide, resulting in an electromagnetic field distribution that is nearly the same as that of a conventional waveguide. The upper metal surface etched the CSRR structure. The main function of the CSRR structure is that it can generate a centralized electromagnetic field to improve sensor sensitivity and realize wireless signal transmission.
Where D is the diameter of the metal cylindrical hole on the side wall, b is the distance between the two adjacent cylindrical hole centers, R0 is the radius of the sensor, Reff is the distance between the metal cylindrical hole on the side wall and the sensor center, and H is the thickness of the sensor, namely the distance between the upper and lower metal surfaces. R1 is the external radius of the external resonant ring of the CSRR structure, s1 is the gap width of the external resonant ring, R2 is the external radius of the internal resonant ring of the CSRR structure, s2 is the gap width of the internal resonant ring, and t is the opening width of the resonant ring of the CSRR structure.
The resonant frequency of the SCIW structure is [
11]:
where
f0 is resonant frequency,
c is the speed of light,
P11 is the first zero of a first-order Bessel function(
P11 = 2.4048), ε for the dielectric constant of dielectric material, μ for the magnetic permeability of medium material. When the size of the sidewall metal cylinder is
D < 0.1
λg,
b < 4
D and
D < 0.2
Reff, the sidewall metal cylinder can be regarded as an ideal electromagnetic wall, and the electromagnetic wave leakage from it can be ignored. To a certain extent, the electromagnetic interference of the external metal environment to the sensor signal can be reduced. When the size of the sensor is fixed, the resonant frequency is determined by the dielectric constant of the dielectric material. The dielectric constant of the sensor material will increase with the temperature increasing accordingly, leading to the decrease of the resonant frequency of the sensor, so as to realize the temperature measurement.
The equivalent circuit of the designed sensor is analyzed, as shown in
Figure 2c. The metal cylinder on the side wall of the substrate integrated waveguide structure can be equivalent to a parallel inductor (
Lr), and the upper and lower metal plates can be equivalent to a capacitor (
Cr). CSRR structure can be equivalent to the parallel connection of two inductors (
Ls) and their inter-ring coupling capacitors (
Cs), wherein
Ls1 and
Ls2 are equivalent circuits of the inner and outer resonant rings, respectively, and the metal walls on both sides of the inner and outer resonant rings are equivalent to
Cs1 and
Cs2 in turn. Among them, the equivalent inductance of CSRR structure and the equivalent capacitance of the upper and lower metal surfaces of SICW structure play a dominant role, so other parts of the equivalent circuit can ignore its influence. Then the resonant frequency of the sensor is:
where ε is the dielectric constant of the medium between the plates,
S is the opposite area of the capacitor plate,
d is the distance between the plates, k is the static force constant (k = 8.987551 × 10
9 N·m
2/C
2).
When CSRR structure is determined,
Ls and
Cs are determined.
Cr is determined by the medium material between the upper and lower metal sheets. The dielectric constant of Si
3N
4 ceramics increases with the increase of temperature. According to Equation (4), the equivalent capacitance
Cr increases, and the resonant frequency of the sensor decreases accordingly. The simplified equivalent circuit of the sensor is shown in
Figure 2d. The sensor can be simplified and equivalent to the parallel connection of inductor and capacitor, and the resonant frequency can be simplified to Equation (5).
3. Simulation and Optimization
In order to improve the transmission efficiency of the sensor and reduce the loss, HFSS software was used to model and simulate the sensor and the inquiry antenna, respectively. The performance of the sensor was judged by the return loss in the response curve, and the optimal size parameters were obtained.
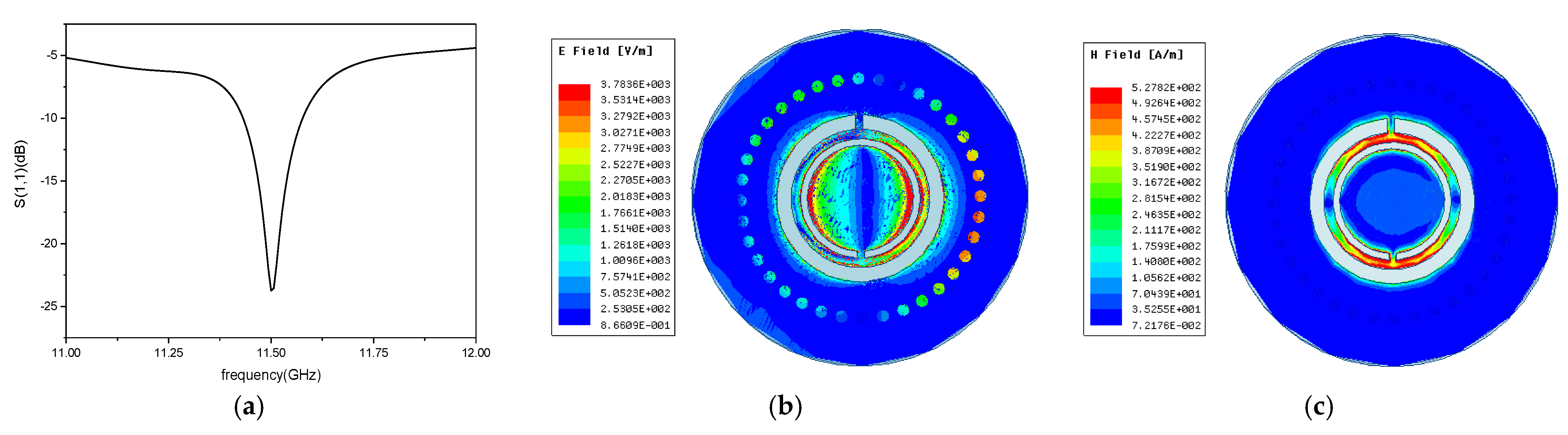
The resonant frequency of the sensor set in this paper is
f0 = 11.5 GHz. The high-temperature resistant ceramic (Si
3N
4 ceramics) is used as the sensitive material of the sensor. At room temperature, the dielectric constant is 3.6 and the relative permeability is 0.98. The standard rectangular waveguide is used as the excitation source of the CSRR-SICW sensor. The size of the rectangular waveguide is 20.78 mm × 9.24 mm × 46 mm. Under the condition of satisfying the leak-proof size of the metal cylinder on the side wall, combined with formulas (1) and (2), the dimensional parameters of the sensor are preliminarily calculated as:
Reff = 5.5 mm,
R0 = 7 mm,
D = 0.5 mm,
H= 1.1 mm. The number of metal cylinders on the side wall was 36. In order to improve the performance of the substrate integrated waveguide sensor, the external resonant ring radius
R1, the external resonant ring gap width
s1, the internal resonant ring radius
R2, and the internal resonant ring gap width
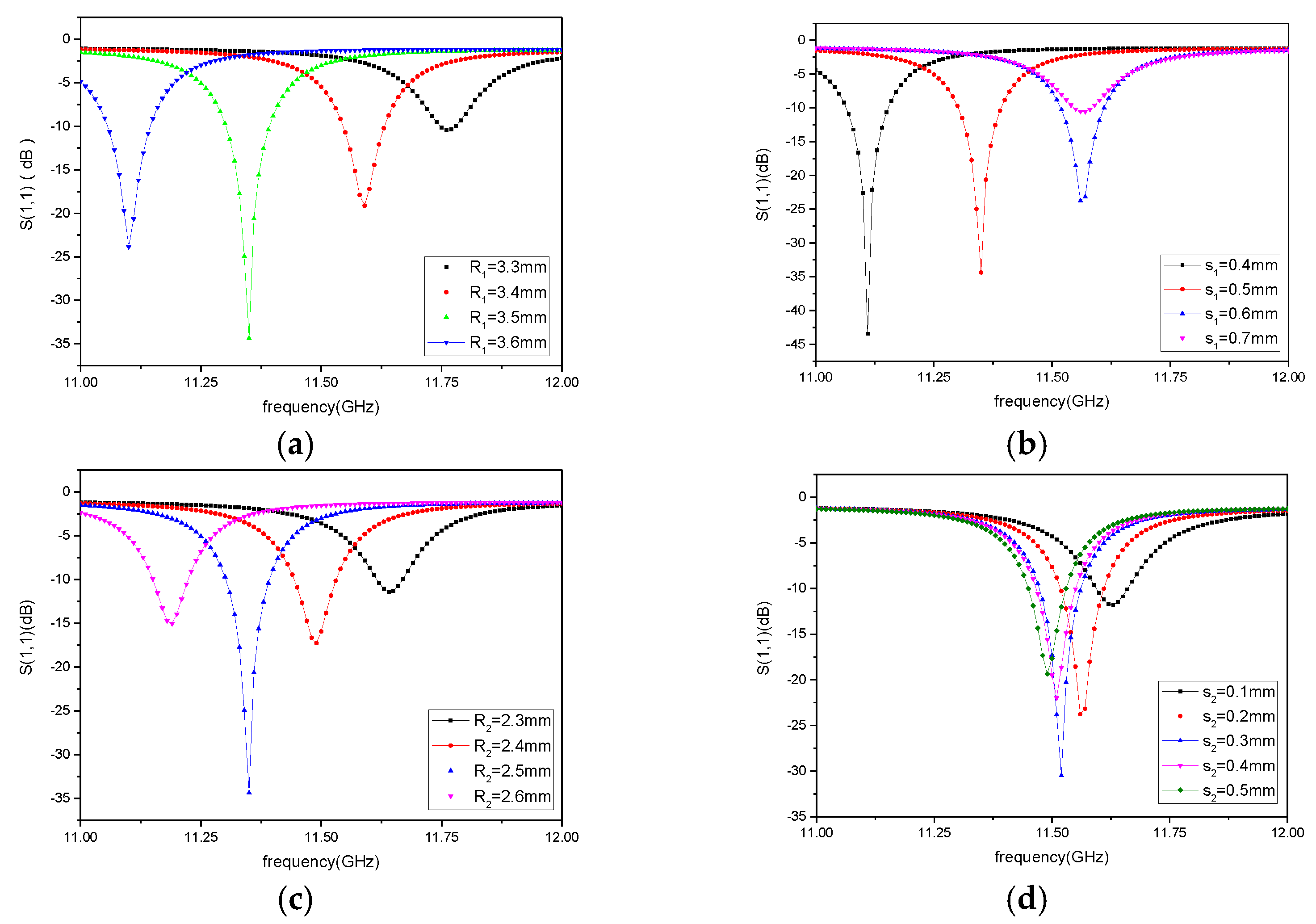
s2 of the CSRR structure were simulated and analyzed, respectively. The simulation results of parameter optimization are shown in
Figure 3.
According to the simulation results, the radius of the CSRR external resonant ring
R1, the width of the gap of the external resonant ring
s1 and the radius of the internal resonant ring
R2 all affect the resonant frequency of the sensor. When
R1 increases, the resonant frequency decreases accordingly. This is because the equivalent capacitance increases with the increase of
R1, leading to the decrease of the resonant frequency of the CSRR structure. When
R1 remains unchanged, when the metal walls on both sides of the external resonant ring become larger, the distance between the two plates of the equivalent capacitor becomes larger, and the equivalent capacitance decreases accordingly. The resonant frequency of the improved CSRR structure increases. According to the simulation results, when the distance between the plates reaches a certain distance, the influence on the equivalent capacitance gradually decreases. Similarly, the influence of the inner circle radius and the gap of the internal resonant ring on the resonant frequency of CSRR structure can be obtained. The resonant frequency of the CSRR structure of the sensor is mainly determined by the radius and the gap of the external resonant ring and the radius of the internal resonant ring; however, the gap of the internal resonant ring mainly plays a role in strengthening. Therefore, the precise regulation of the resonant frequency can be realized by flexibly adjusting the size parameters of the CSRR structure. The structural size of the sensor is shown in
Table 1. In order to obtain the quality factor of the sensor, HFSS software was used to model and simulate the designed sensor in the eigen-mode. According to the simulation results, the quality factor of the designed sensor was 1215.93.
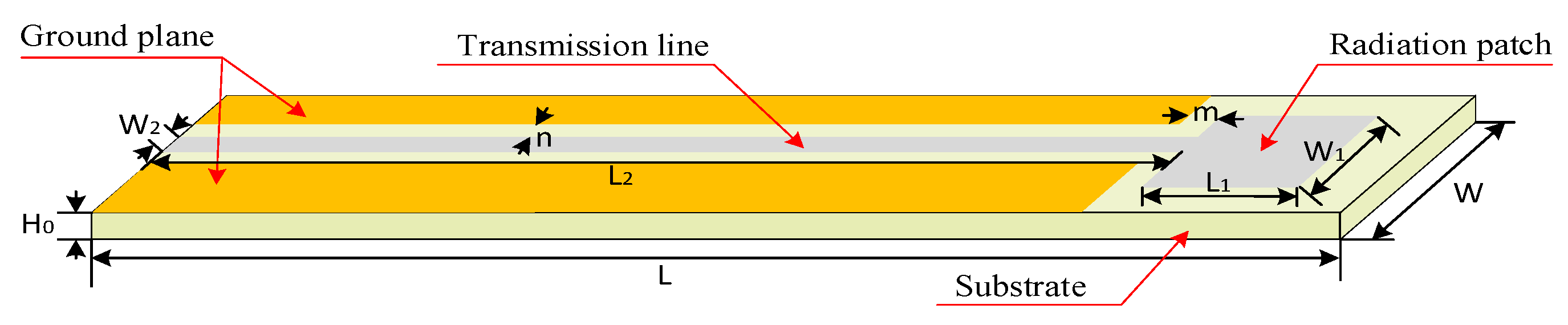
The schematic diagram of the designed coplanar waveguide (CPW) antenna is shown in
Figure 4. Respectively,
W and
L are the width and length of the inquiry antenna,
W1 and
L1 are the width and length of the radiation patch,
W2 and
L2 are microstrip transmission line width and length,
m and
n are the spacing widths between the receiving floor, the radiation patch, and the transmission line, respectively. The dimensions of the coplanar waveguide antenna are shown in
Table 2.
The previously simulated CSRR-SICW high temperature sensor is placed under the CPW antenna to receive and send signals. The model and simplified equivalent circuit diagram is shown in
Figure 5. The resonant frequency of the sensor at room temperature is 11.5 GHz. The distribution of electric field and magnetic field of the sensor is shown in
Figure 6, indicating that the strongest electromagnetic field is mainly distributed around the CSRR structure.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}