Surface-Tension-Confined Channel with Biomimetic Microstructures for Unidirectional Liquid Spreading


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
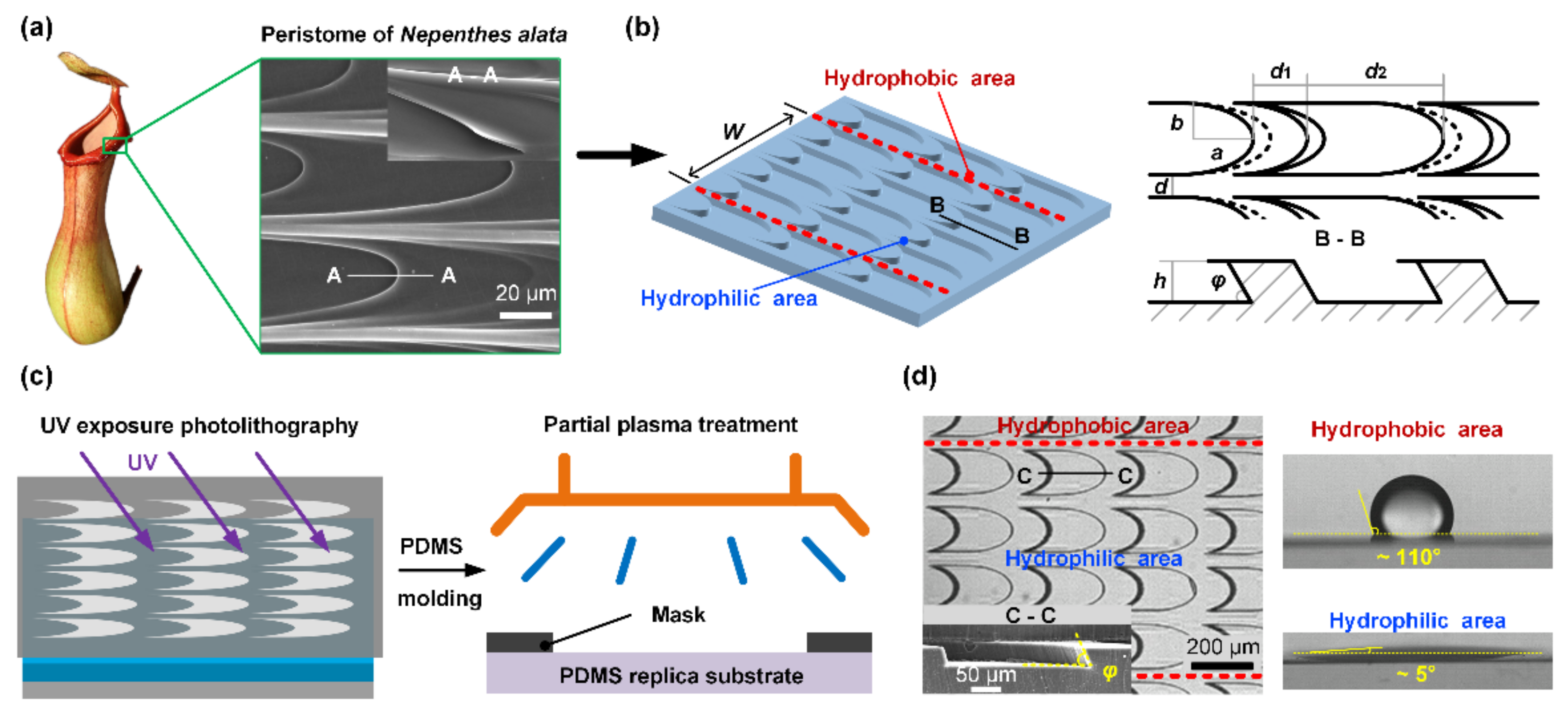
2.2. Design and Fabrication of STC Channel with Biomimetic Microstructures
2.3. Observation of Liquid Transport Behavior
3. Results and Discussion
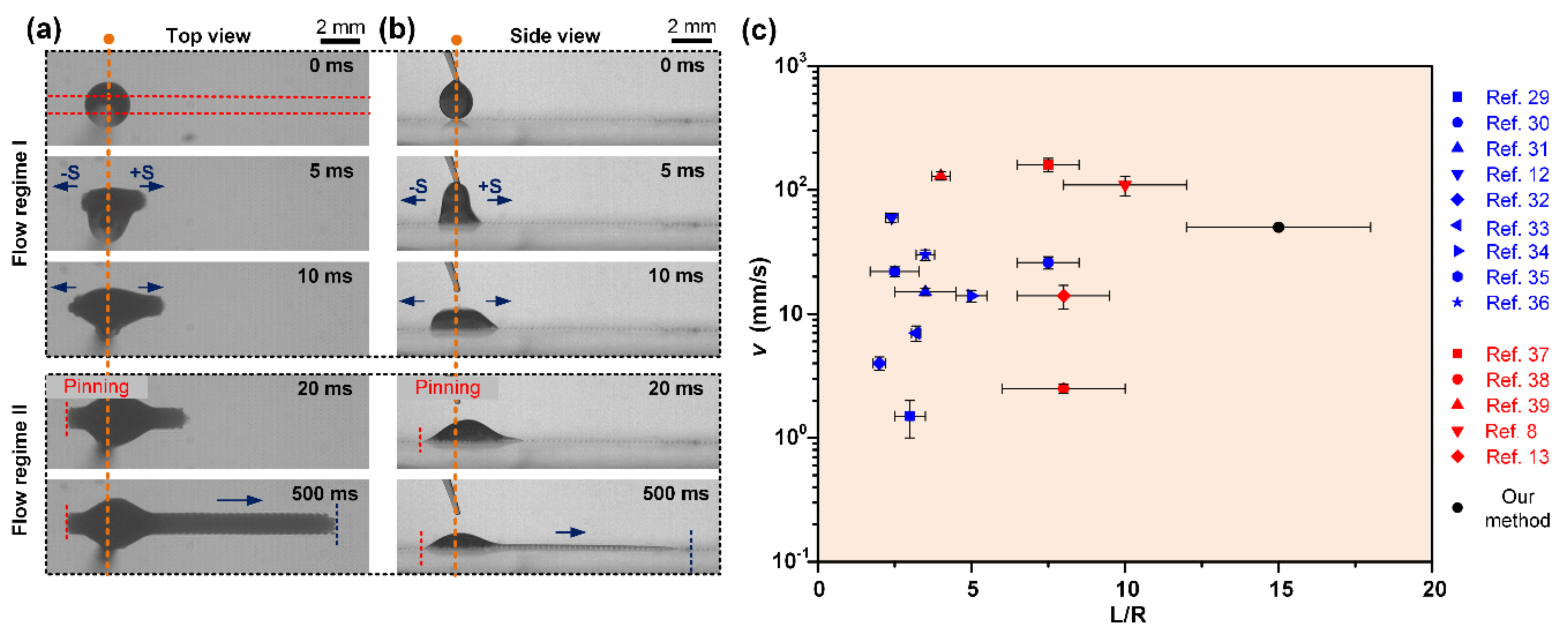
3.1. Liquid Transport Behavior on STC Unidirectional Liquid Spreading Channel
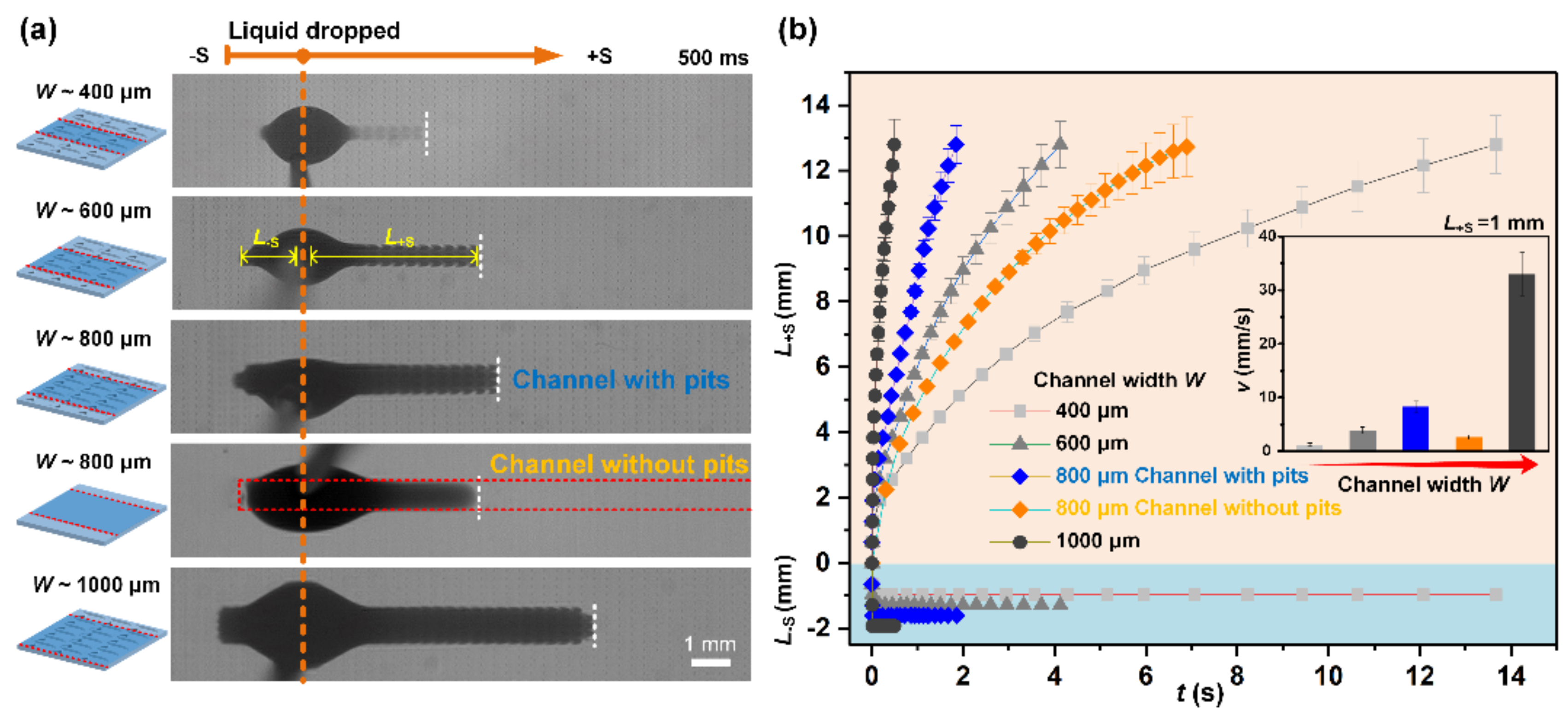
3.2. Impact of Channel Parameters on Unidirectional Spreading
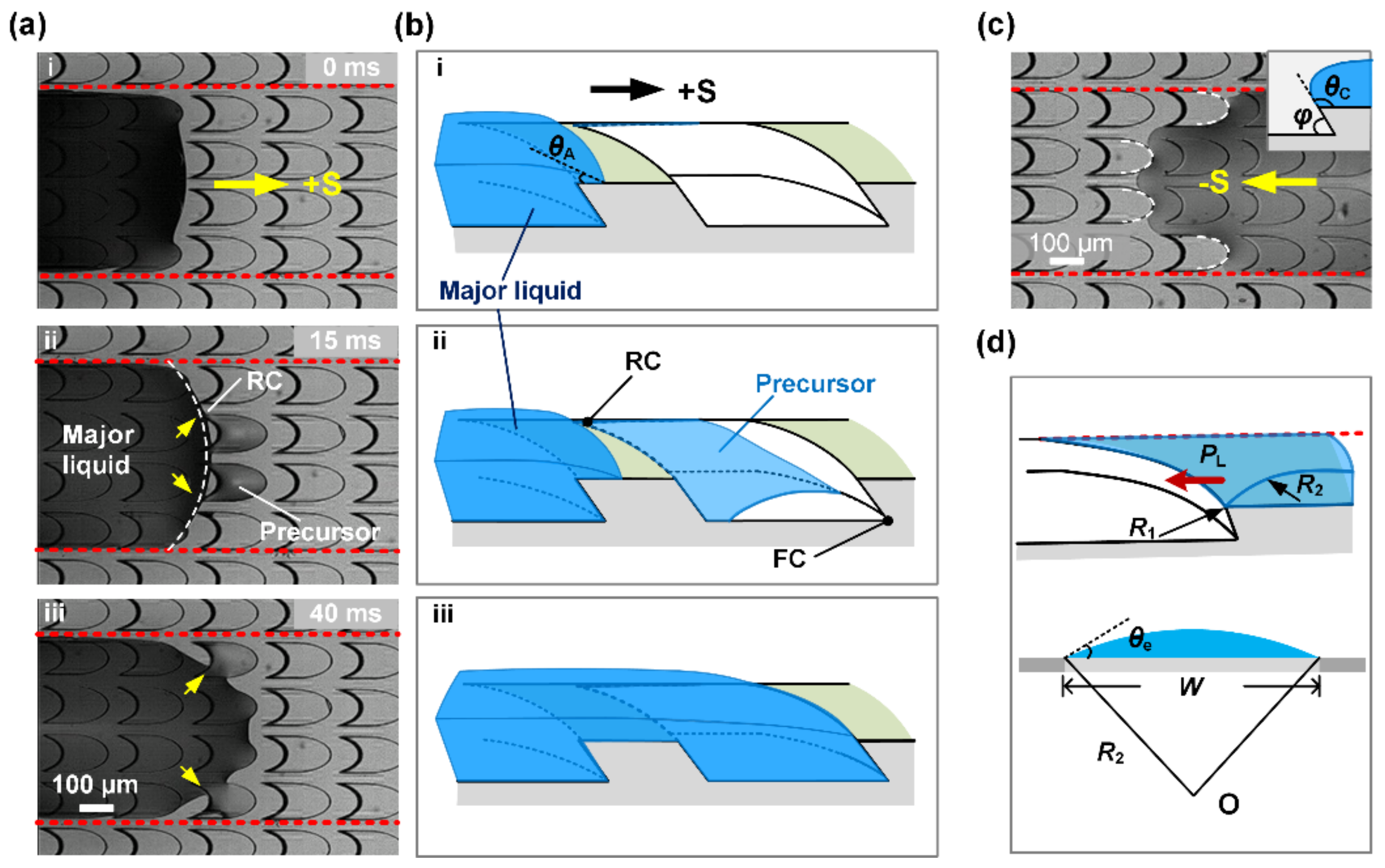
3.3. Underlying Mechanisms of Unidirectional Liquid Spreading
3.3.1. Mechanism for Liquid Spreading
3.3.2. Mechanism for Liquid Pinning
3.4. Impact of Microcavity Structural Features
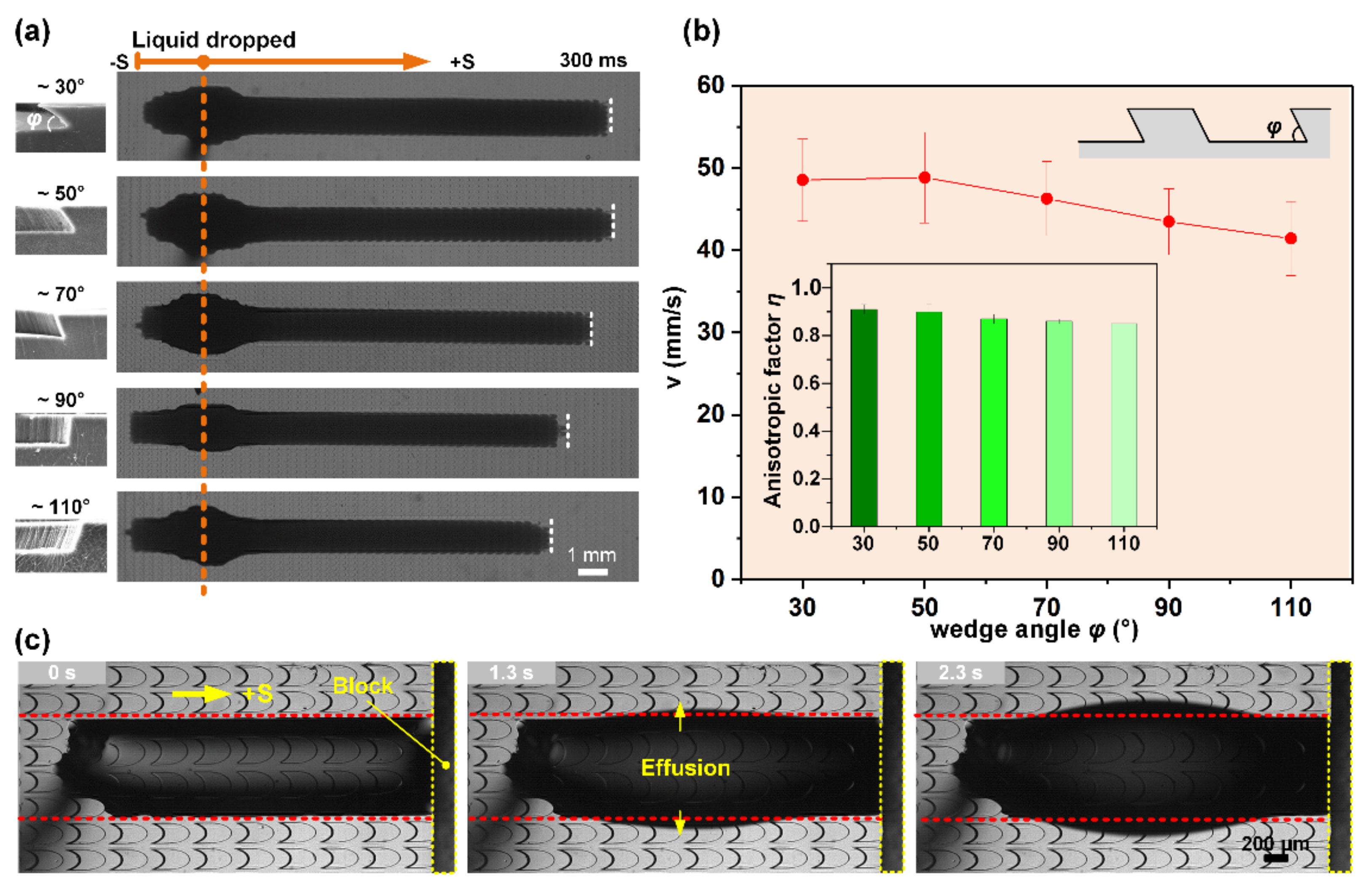
3.4.1. Influence of Microcavity Wedge Angle
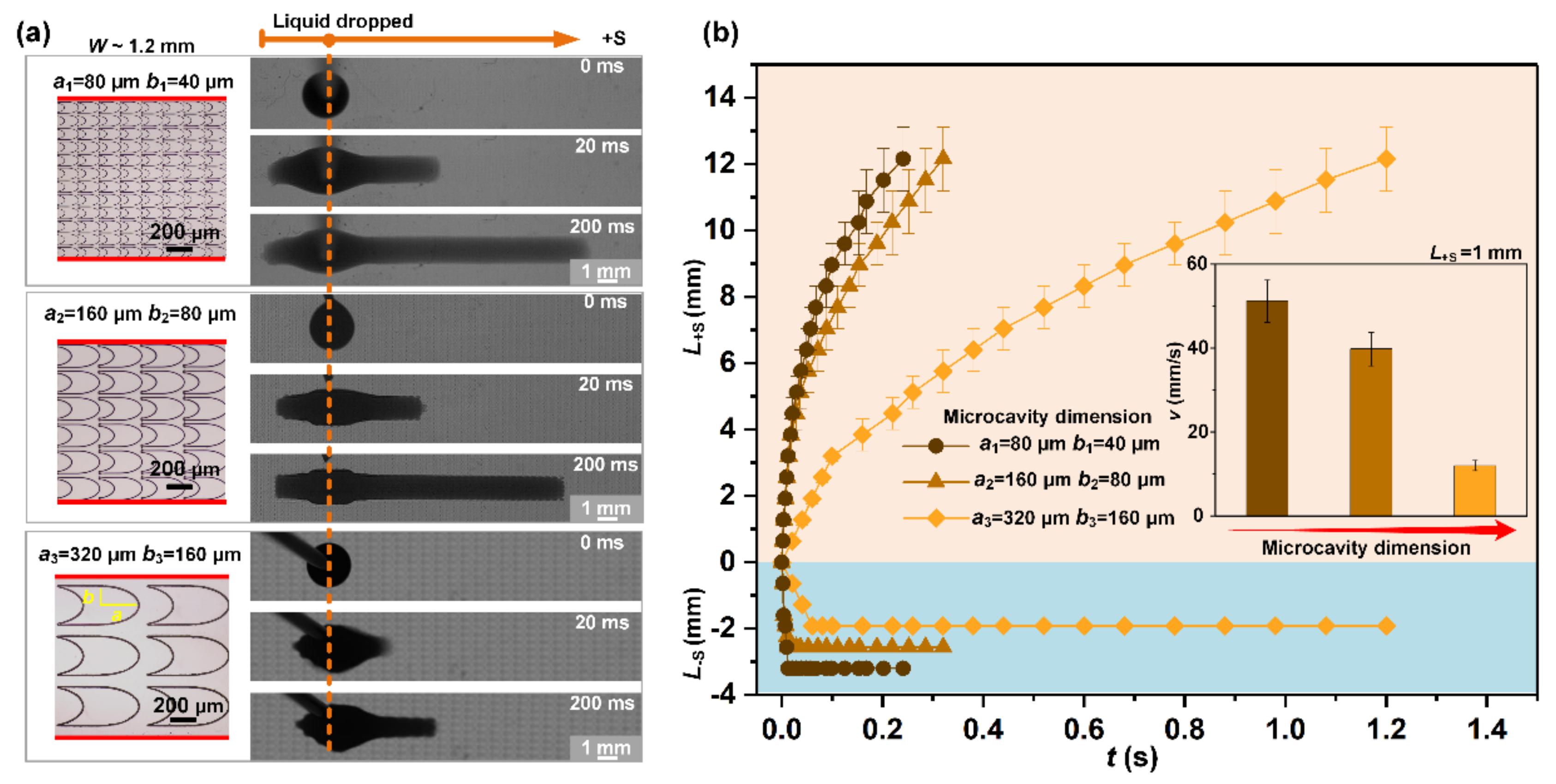
3.4.2. Influence of Microcavity Dimension
3.5. Application of STC Unidirectional Liquid Spreading Channel
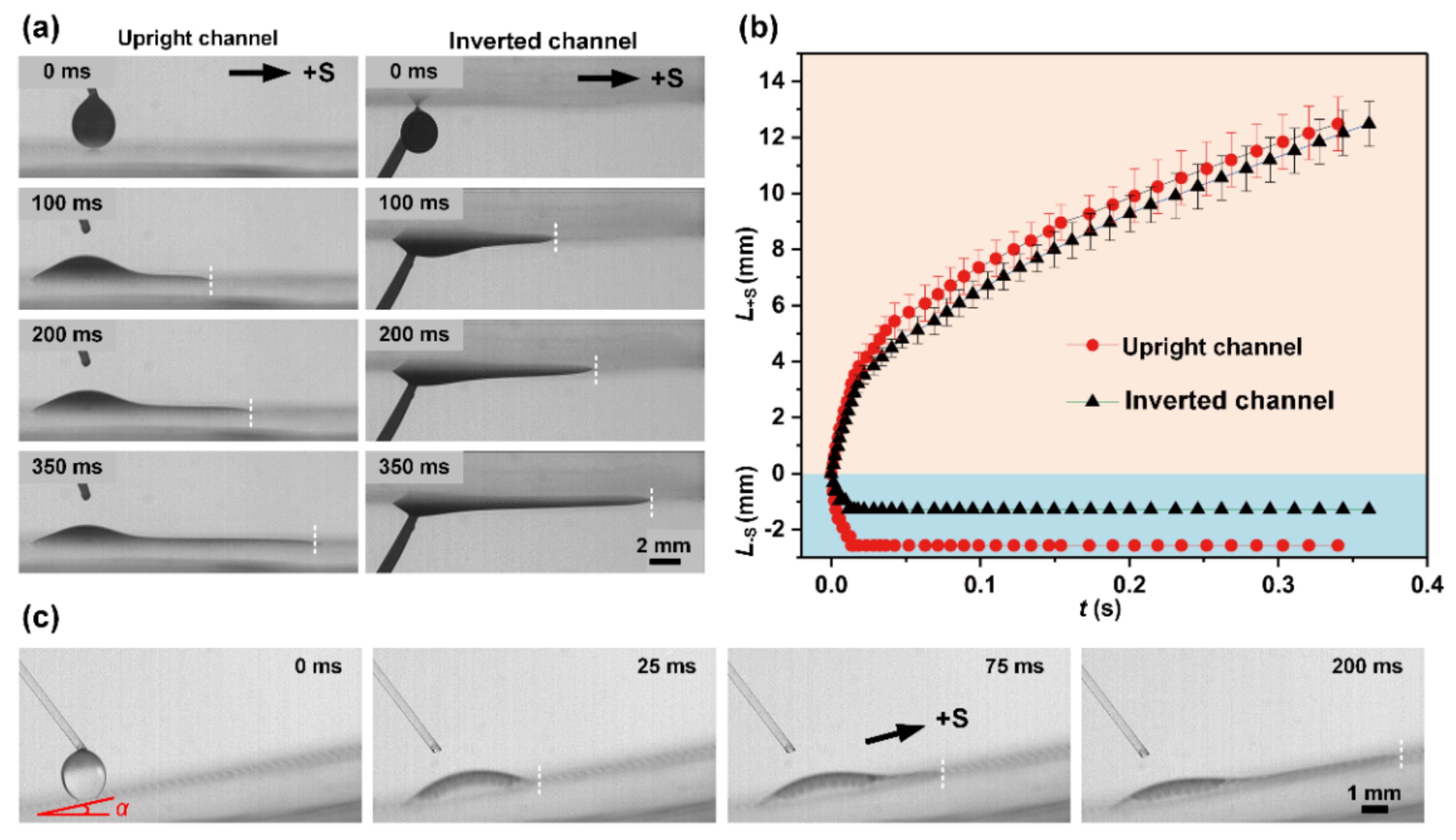
3.5.1. Spatial Unidirectional Liquid Spreading
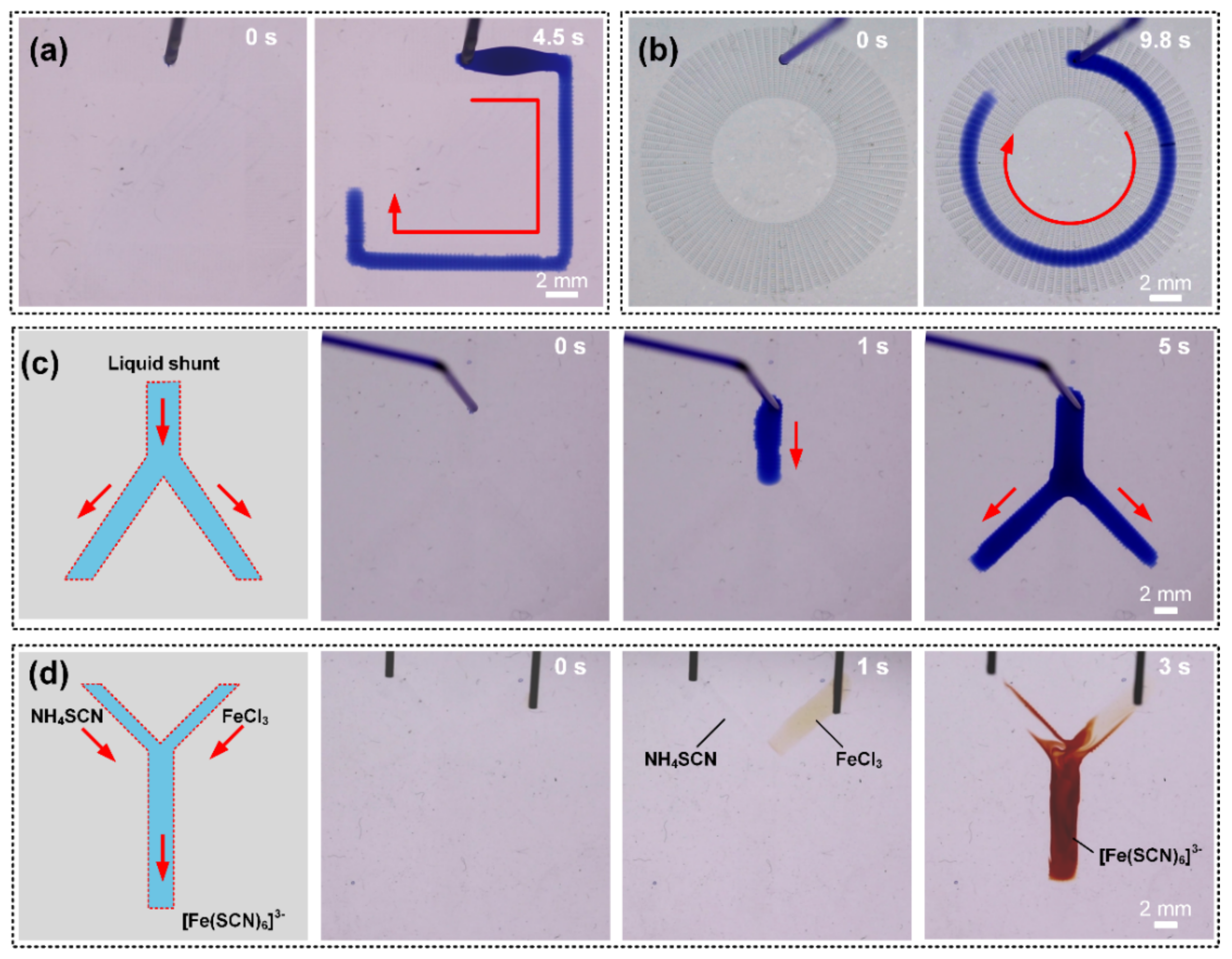
3.5.2. Concise Applications in Microfluidic Devices and Microreactors
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Ju, J.; Bai, H.; Zheng, Y.; Zhao, T.; Fang, R.; Jiang, L. A multi-structural and multi-functional integrated fog collection system in cactus. Nat. Commun. 2012, 3, 1247. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, H.; Ran, T.; Gan, Y.; Zhou, J.; Zhang, Y.; Zhang, L.; Zhang, D.; Jiang, L. Ultrafast water harvesting and transport in hierarchical microchannels. Nat. Mater. 2018, 17, 935–942. [Google Scholar] [CrossRef] [PubMed]
- Parker, A.R.; Lawrence, C.R. Water capture by a desert beetle. Nature 2001, 414, 33–34. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Zhang, P.; Liu, Y.; Zhang, D.; Chen, H. Self-Lubricanting Slippery Surface with Wettability Gradients for Anti-Sticking of Electrosurgical Scalpel. Micromachines 2018, 9, 591. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; Wu, L.; Yu, C.; Dong, Z.; Jiang, L. Peristome-Mimetic Curved Surface for Spontaneous and Directional Separation of Micro Water-in-Oil Drops. Angew. Chem. 2017, 56, 13623–13628. [Google Scholar] [CrossRef]
- Kim, T.-I.; Suh, K.Y. Unidirectional wetting and spreading on stooped polymer nanohairs. Soft Matter 2009, 5, 4131. [Google Scholar] [CrossRef]
- Lv, J.A.; Liu, Y.; Wei, J.; Chen, E.; Qin, L.; Yu, Y. Photocontrol of fluid slugs in liquid crystal polymer microactuators. Nature 2016, 537, 179–184. [Google Scholar] [CrossRef]
- Ghosh, A.; Ganguly, R.; Schutzius, T.M.; Megaridis, C.M. Wettability patterning for high-rate, pumpless fluid transport on open, non-planar microfluidic platforms. Lab Chip 2014, 14, 1538–1550. [Google Scholar] [CrossRef]
- Long, Z.; Shetty, A.M.; Solomon, M.J.; Larson, R.G. Fundamentals of magnet-actuated droplet manipulation on an open hydrophobic surface. Lab Chip 2009, 9, 1567–1575. [Google Scholar] [CrossRef]
- Buguin, A.; Talini, L.; Silberzan, P. Ratchet-like topological structures for the control of microdrops. Appl. Phys. A 2014, 75, 207–212. [Google Scholar] [CrossRef]
- Soto, D.; Lagubeau, G.; Clanet, C.; Quéré, D. Surfing on a herringbone. Phys. Rev. Fluids 2016, 1. [Google Scholar] [CrossRef]
- Liu, C.; Sun, J.; Li, J.; Xiang, C.; Che, L.; Wang, Z.; Zhou, X. Long-range spontaneous droplet self-propulsion on wettability gradient surfaces. Sci. Rep. 2017, 7. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Cheng, J.; Zhou, C.; Xing, H.; Wen, X.; Pi, P.; Xu, S. Droplet Motion on a Shape Gradient Surface. Langmuir ACS J. Surf. Colloids 2017, 33, 4172–4177. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wang, T.; Ge, P.; Xue, P.; Ye, S.; Chen, H.; Li, Z.; Zhang, J.; Yang, B. Controlling flow behavior of water in microfluidics with a chemically patterned anisotropic wetting surface. Langmuir ACS J. Surf. Colloids 2015, 31, 4032–4039. [Google Scholar] [CrossRef]
- Chu, K.H.; Xiao, R.; Wang, E.N. Uni-directional liquid spreading on asymmetric nanostructured surfaces. Nat. Mater. 2010, 9, 413–417. [Google Scholar] [CrossRef] [PubMed]
- Blow, M.L.; Kusumaatmaja, H.; Yeomans, J.M. Imbibition through an array of triangular posts. J. Phys. Condens. Matter Inst. Phys. J. 2009, 21, 464125. [Google Scholar] [CrossRef]
- Feng, J.; Rothstein, J.P. One-way wicking in open micro-channels controlled by channel topography. J. Colloid Interface Sci. 2013, 404, 169–178. [Google Scholar] [CrossRef]
- Zheng, Y.; Bai, H.; Huang, Z.; Tian, X.; Nie, F.-Q.; Zhao, Y.; Zhai, J.; Jiang, L. Directional water collection on wetted spider silk. Nature 2010, 463, 640–643. [Google Scholar] [CrossRef]
- Comanns, P.; Buchberger, G.; Buchsbaum, A.; Baumgartner, R.; Kogler, A.; Bauer, S.; Baumgartner, W. Directional, passive liquid transport: the Texas horned lizard as a model for a biomimetic ‘liquid diode’. J. R. Soc. Interface 2015, 12, 20150415. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, P.; Zhang, L.; Liu, H.; Jiang, Y.; Zhang, D.; Han, Z.; Jiang, L. Continuous directional water transport on the peristome surface of Nepenthes alata. Nature 2016, 532, 85–89. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, L.; Zhang, P.; Zhang, D.; Han, Z.; Jiang, L. A Novel Bioinspired Continuous Unidirectional Liquid Spreading Surface Structure from the Peristome Surface of Nepenthes alata. Small 2017, 13. [Google Scholar] [CrossRef]
- Yu, C.; Li, C.; Gao, C.; Dong, Z.; Wu, L.; Jiang, L. Time-Dependent Liquid Transport on a Biomimetic Topological Surface. ACS Nano 2018, 12, 5149–5157. [Google Scholar] [CrossRef] [PubMed]
- Shang, L.; Yu, Y.; Gao, W.; Wang, Y.; Qu, L.; Zhao, Z.; Chai, R.; Zhao, Y. Bio-Inspired Anisotropic Wettability Surfaces from Dynamic Ferrofluid Assembled Templates. Adv. Funct. Mater. 2018, 28, 1705802. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, H.; Li, L.; Liu, H.; Liu, G.; Zhang, L.; Zhang, D.; Jiang, L. Bioinspired Smart Peristome Surface for Temperature-Controlled Unidirectional Water Spreading. ACS Appl. Mater. Interfaces 2017, 9, 5645–5652. [Google Scholar] [CrossRef]
- Nguyen, T.; Chidambara Vinayaka, A.; Duong Bang, D.; Wolff, A. A Complete Protocol for Rapid and Low-Cost Fabrication of Polymer Microfluidic Chips Containing Three-Dimensional Microstructures Used in Point-of-Care Devices. Micromachines 2019, 10, 624. [Google Scholar] [CrossRef] [Green Version]
- Fatona, A.; Chen, Y.; Reid, M.; Brook, M.A.; Moran-Mirabal, J.M. One-step in-mould modification of PDMS surfaces and its application in the fabrication of self-driven microfluidic channels. Lab Chip 2015, 15, 4322–4330. [Google Scholar] [CrossRef] [Green Version]
- Toepke, M.W.; Beebe, D.J. PDMS absorption of small molecules and consequences in microfluidic applications. Lab Chip 2006, 6, 1484–1486. [Google Scholar] [CrossRef]
- Zhou, J.; Ellis, A.V.; Voelcker, N.H. Recent developments in PDMS surface modification for microfluidic devices. Electrophoresis 2010, 31, 2–16. [Google Scholar] [CrossRef]
- Whitesides, G.M.; Chaudhury, M.K. How to Make Water Run Uphill. Science 1992, 256, 1539–1541. [Google Scholar]
- Li, J.; Qin, Q.H.; Shah, A.; Ras, R.H.; Tian, X.; Jokinen, V. Oil droplet self-transportation on oleophobic surfaces. Sci. Adv. 2016, 2, e1600148. [Google Scholar] [CrossRef] [Green Version]
- Bliznyuk, O.; Jansen, H.P.; Kooij, E.S.; Zandvliet, H.J.; Poelsema, B. Smart design of stripe-patterned gradient surfaces to control droplet motion. Langmuir ACS J. Ourfaces Colloids 2011, 27, 11238–11245. [Google Scholar] [CrossRef] [PubMed]
- Ito, Y.; Heydari, M.; Hashimoto, A.; Konno, T.; Hirasawa, A.; Hori, S.; Kurita, K.; Nakajima, A. The movement of a water droplet on a gradient surface prepared by photodegradation. Langmuir ACS J. Surf. Colloids 2007, 23, 1845–1850. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Wang, H.; Liao, Q.; Ding, Y.D.; Gu, Y.B. Experiments and analysis on self-motion behaviors of liquid droplets on gradient surfaces. Exp. Therm. Fluid Sci. 2009, 33, 947–954. [Google Scholar] [CrossRef]
- Sun, C.; Zhao, X.-W.; Han, Y.-H.; Gu, Z.-Z. Control of water droplet motion by alteration of roughness gradient on silicon wafer by laser surface treatment. Thin Solid Film. 2008, 516, 4059–4063. [Google Scholar] [CrossRef]
- Shastry, A.; Case, M.J.; Bohringer, K.F. Directing droplets using microstructured surfaces. Langmuir ACS J. Surf. Colloids 2006, 22, 6161–6167. [Google Scholar] [CrossRef]
- Lai, Y.H.; Yang, J.T.; Shieh, D.B. A microchip fabricated with a vapor-diffusion self-assembled-monolayer method to transport droplets across superhydrophobic to hydrophilic surfaces. Lab Chip 2010, 10, 499–504. [Google Scholar] [CrossRef]
- Alheshibri, M.H.; Rogers, N.G.; Sommers, A.D.; Eid, K.F. Spontaneous movement of water droplets on patterned Cu and Al surfaces with wedge-shaped gradients. Appl. Phys. Lett. 2013, 102, 174103. [Google Scholar] [CrossRef] [Green Version]
- Khoo, H.S.; Tseng, F.G. Spontaneous high-speed transport of subnanoliter water droplet on gradient nanotextured surfaces. Appl. Phys. Lett. 2009, 95, 063108. [Google Scholar] [CrossRef]
- Zhang, J.; Han, Y. Shape-gradient composite surfaces: Water droplets move uphill. Langmuir ACS J. Surf. Colloids 2007, 23, 6136–6141. [Google Scholar] [CrossRef]
- Li, J.; Zhou, X.; Li, J.; Che, L.; Yao, J.; McHale, G.; Chaudhury, M.K.; Wang, Z. Topological liquid diode. Sci. Adv. 2017, 3, eaao3530. [Google Scholar] [CrossRef] [Green Version]
- Extrand, C.W. Spontaneous Spreading of Viscous Liquid Drops. J. Colloid Interface Sci. 1993, 157, 72–76. [Google Scholar] [CrossRef]
- Darhuber, A.A.; Troian, S.M.; Reisner, W.W. Dynamics of capillary spreading along hydrophilic microstripes. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2001, 64, 031603. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, C.; Zhang, L.; Ru, Y.; Li, N.; Li, C.; Gao, C.; Dong, Z.; Jiang, L. Drop Cargo Transfer via Unidirectional Lubricant Spreading on Peristome-Mimetic Surface. ACS Nano 2018, 12, 11307–11315. [Google Scholar] [CrossRef] [PubMed]
- Ouali, F.F.; McHale, G.; Javed, H.; Trabi, C.; Shirtcliffe, N.J.; Newton, M.I. Wetting considerations in capillary rise and imbibition in closed square tubes and open rectangular cross-section channels. Microfluid. Nanofluid. 2013, 15, 309–326. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Chang, C.-C.; Hong, S.-J.; Sheng, Y.-J.; Tsao, H.-K. Capillary Rise in a Microchannel of Arbitrary Shape and Wettability: Hysteresis Loop. Langmuir ACS J. Surf. Colloids 2012, 28, 16917–16926. [Google Scholar] [CrossRef]
- Wenzel, R.N. Resistance of solid surface to wetting by water. Trans. Faraday Soc. 1936, 28, 988–994. [Google Scholar] [CrossRef]
- Oliver, J.F.; Huh, C.; Mason, S.G. Resistance to spreading of liquids by sharp edges. J. Colloid Interface Sci. 1977, 59, 568–581. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, L.; Zhang, Y.; Zhang, P.; Zhang, D.; Jiang, L. Uni-directional liquid spreading control on a bio-inspired surface from the peristome of Nepenthes alata. J. Mater. Chem. A 2017, 5, 6914–6920. [Google Scholar] [CrossRef]
- Weislogel, M.M.; Lichter, S. Capillary flow in an interior comer. J. Fluid Mech. 1998, 373, 349–378. [Google Scholar] [CrossRef] [Green Version]
- Henares, T.G.; Yamada, K.; Takaki, S.; Suzuki, K.; Citterio, D. “Drop-slip” bulk sample flow on fully inkjet-printed microfluidic paper-based analytical device. Sens. Actuators B Chem. 2017, 244, 1129–1137. [Google Scholar] [CrossRef]
- Sun, W.; Tang, L.; Hong, W.; Zhan, Y.; Yang, B.; Liu, J. A novel microstructure inspired from Nepenthes alata and lizard skin and its enhanced uni-directional liquid spreading property. RSC Adv. 2019, 9, 7842–7848. [Google Scholar] [CrossRef] [Green Version]
- Rahimi, R.; Yu, W.; Ochoa, M.; Ziaie, B. Directly embroidered microtubes for fluid transport in wearable applications. Lab Chip 2017, 17, 1585–1593. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Boban, M.; Snyder, S.A.; Kobaku, S.P.R.; Kwon, G.; Mehta, G.; Tuteja, A. Paper-Based Surfaces with Extreme Wettabilities for Novel, Open-Channel Microfluidic Devices. Adv. Funct. Mater. 2016, 26, 6121–6131. [Google Scholar] [CrossRef]
- Morrissette, J.M.; Mahapatra, P.S.; Ghosh, A.; Ganguly, R.; Megaridis, C.M. Rapid, Self-driven Liquid Mixing on Open-Surface Microfluidic Platforms. Sci. Rep. 2017, 7, 1800. [Google Scholar] [CrossRef] [PubMed] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Gan, Y.; Zhang, L.; Zhang, D.; Chen, H. Surface-Tension-Confined Channel with Biomimetic Microstructures for Unidirectional Liquid Spreading. Micromachines 2020, 11, 978. https://doi.org/10.3390/mi11110978
Zhang Y, Gan Y, Zhang L, Zhang D, Chen H. Surface-Tension-Confined Channel with Biomimetic Microstructures for Unidirectional Liquid Spreading. Micromachines. 2020; 11(11):978. https://doi.org/10.3390/mi11110978
Chicago/Turabian StyleZhang, Yi, Yang Gan, Liwen Zhang, Deyuan Zhang, and Huawei Chen. 2020. "Surface-Tension-Confined Channel with Biomimetic Microstructures for Unidirectional Liquid Spreading" Micromachines 11, no. 11: 978. https://doi.org/10.3390/mi11110978