1. Introduction
The high complexity of Earth’s topographic relief and the adopted scales of observations in remote sensing and mapping make it impossible to present any area with full details of elevation and land cover. Hence the necessity to map the terrain surface on models that involve a certain degree of approximation. The development and use of a good elevation and land cover model are of key importance in geomorphological, hydrological, and botanical studies as well as in applied research and engineering applications related to forest management, flood modelling, or identification of potential landslides and other geohazards in a given area. In particular, for geomorphological analysis of fluvial landscapes (where within river valleys there are wooded and bushy areas as well as uncovered places such as dunes, sandbars, riverine islands, outwash areas, rocky outcrops, and erosional landforms developed in bedrock) it is important to have digital elevation models (DEM) describing the topography of the terrain with a high degree of accuracy, in the order of centimetres [
1,
2,
3]. While elevation data have been acquired for decades through geodetic ground-based surveys, this approach is currently considered time-consuming, and it does not deliver the vast spatial coverage available thanks to remote sensing techniques. The issue of the suitability of different remote sensing platforms and techniques for the acquisition of very high-resolution data for the development of digital elevation models in the context of fluvial landscape monitoring is the focus of the article.
A digital elevation model (DEM) is a 3D computer graphics representation of elevation data, which defines the Z values of terrain surfaces [
4]. In other words, DEM may be considered a digital description of the terrain surface using a set of heights over 2D points residing on a reference surface [
5]. Maune et al. [
6] state that “DEM” is a generic term covering digital topographic (and bathymetric) data in all their various forms as well as the method(s) for implicitly interpreting the elevations between observations. While a digital terrain model (DTM) represents the elevation of bare ground of the terrain, a digital surface model (DSM) depicts elevations of the top of reflective surfaces, such as tree canopy, buildings, or powerlines. A DTM may be obtained through several algorithms removing objects from the DSM [
7,
8]. The digital terrain model is particularly important for geomorphologists and geologists, useful in land-use planning, soil mapping, archaeology, and practically required for flood or drainage modelling. The digital surface model is useful for landscape modelling, urban planning, and management of the above-ground infrastructure (in telecommunications, aviation, etc.). Another important product and an example of “DEM of Difference” (DoD) [
9] that may be derived from the DSM is a canopy height model (CHM), which is a reconstruction of the upper limits of the forest canopy, obtained as a difference between the DSM and DTM.
The DEM can be obtained in various ways. Digital aerial photogrammetry (DAP) is a well-established RS technique that allows the acquisition of dense 3D geometric information of real-world objects from stereoscopic image overlapping. It can be applied to any remotely sensed imagery, provided that enough overlapping is guaranteed among two imageries. Hence, many satellites in recent years have been equipped with a stereo acquisition mode (e.g., SPOT, IKONOS, QuickBird, Pléiades), which allows almost simultaneous acquisition of multiple images from different view angles over the same area [
10]. The DAP technique has proven its capabilities in many applications requiring the production of large-scale high-resolution DSM, such as urban studies [
11,
12,
13], hydrological modelling [
14], and natural hazards [
15,
16]. Of particular interest, the Pléiades-1 mission has attracted attention due to its unique tri-stereo image acquisition providing almost simultaneous images from three different acquisition angles, resulting in increased accuracy in DSM generation [
10].
Another well-known technique is called light detection and ranging (LiDAR), based on targeting an object or a surface with an active laser that measures the time for the reflected light to return to the receiver. One of the advantages of LiDAR sensors, due to their penetration capabilities, is the ability to generate highly accurate 3D models of the vegetation structure as well as topographic details underneath, hence producing more accurate DTMs in areas covered by vegetation [
17]. Some differences can be identified depending on the vegetation structure—in the presence of leaf-on vegetation, DTM accuracy is reduced, with low-stature undergrowth vegetation causing the greatest errors, while errors are lower under leaf-off conditions [
18]. Another significant advantage of the LiDAR sensors is that they make it possible to cover extensive study areas with precise measurements in a short time.
One of the objectives of this study is to compare these two well-known techniques—DAP vs. LiDAR—in fluvial monitoring applications. Riparian zones and their vegetation contribute to biodiversity and ecosystem functions of fundamental importance. These include bank stabilization, provisioning of habitat for both aquatic and terrestrial biota, the capture of sediments, flow regulation, and nutrient transport, just to mention a few [
19]. Sediment bars are among the main riverscape units that need to be monitored and characterized [
20,
21]. A precise centimetre-level DTM quantification of their dynamics is of key importance for decision-making processes related to river management activities [
22].
In recent decades, the acquisition of laser scanning data from the aerial platform has rapidly increased, also in fluvial applications [
23,
24], however, their acquisition costs are still very high, due to the high costs of both aeroplane operations and LiDAR sensors. Recently very lightweight sensors have become available on the market, adapted to the unmanned aerial vehicle (UAV) platform, known simply as drones. UAVs have emerged as a low-cost alternative image-capturing platform, still ensuring high spatiotemporal resolutions for photogrammetric applications and dense point cloud generation [
25]. The potential of using these techniques in environmental monitoring applications, including the assessment of topographic terrain features, is as yet insufficiently explored. Among the advantages of UAV technology is the possibility of replacing very expensive aerial data, thus the different cost-benefit relationship between the two technologies, and at the same time the higher flexibility in the organization of flight acquisition campaigns.
Several studies have focused on comparing the generation of DEMs by laser scanning and photogrammetric techniques, mostly related to forest environments, where the laser beam permeability can be verified in relation to the dense and high-plant coverage [
17,
18,
26,
27,
28,
29]. Gil et al. [
17] compared the DEMs for the Canary Islands forests, derived using digital aerial photogrammetry (DAP) and airborne laser scanning (ALS) techniques, with ground measurements as a reference. An ALS-derived DEM was more accurate in densely forested areas, where the DAP-derived DEM was not able to reproduce the ground surface properly. Wallace et al. [
26] compared a DEM created photogrammetrically with the imagery from a camera mounted on a UAV with the one generated with ALS, for a dry eucalypt forest in Tasmania. They found problems related to terrain computation with the photogrammetric technique, especially beneath dense canopy cover. Goodbody et al. [
27] also found out that the UAV-DAP terrain model is inaccurate in forest areas, therefore they used the ALS-derived DEM to normalize height values from UAV-DAP measurements. Salach et al. [
28] examined the accuracy of two DTMs constructed based on LiDAR measurements from UAV (ULS) and UAV-DAP. The accuracy of ULS DTM was slightly higher (RMSE 0.11 m) compared to DTM generated with the photogrammetric method (RMSE 0.14 m) for bare ground, while the difference increased to significant for DTMs of vegetated terrain. Crespo-Peremarch et al. [
29] performed an assessment of the accuracy in the extraction of the DEM according to several techniques, and processing algorithms. It has proved that the ALS technique produces DEMs with an accuracy similar to those generated with TLS (terrestrial laser scanning), while quite lower accuracies were obtained from UAV-DAP.
There are also quite a few studies evaluating the usefulness of DTMs made by different methods and techniques in hydrological applications related to fluvial landscape [
30,
31,
32]. Villanueva et al. [
30] demonstrated the feasibility of semi-automatically obtained UAV-LiDAR DEMs for flood studies at the local level. Tamminga et al. [
31] assessed the capabilities of UAVs to characterize the channel morphology and hydraulic habitat of a 1 km river reach in Canada. They found several advantages of UAV-based imagery for river research and management, including low cost, high efficiency, operational flexibility, high vertical accuracy, and centimetre-scale resolution, as well as some challenges, including vegetation obstructions of the ground surface, the impacts of the haze in the atmosphere, or lack of proper legal regulations for UAV operation, which slow down the adoption of this technology for operational purposes. Woodget et al. [
32] indicate that the use of high-resolution remote sensing from a UAV is a promising technique for quantifying the topography of fluvial environments at the mesohabitat scale, bringing the following advantages: high spatial resolution outputs (orthophoto and DEM), accuracy comparable to or better than that the one achieved by using existing field-based and other remote sensing approaches and, in general, rapidness, flexibility, repeatability, and relative cheapness.
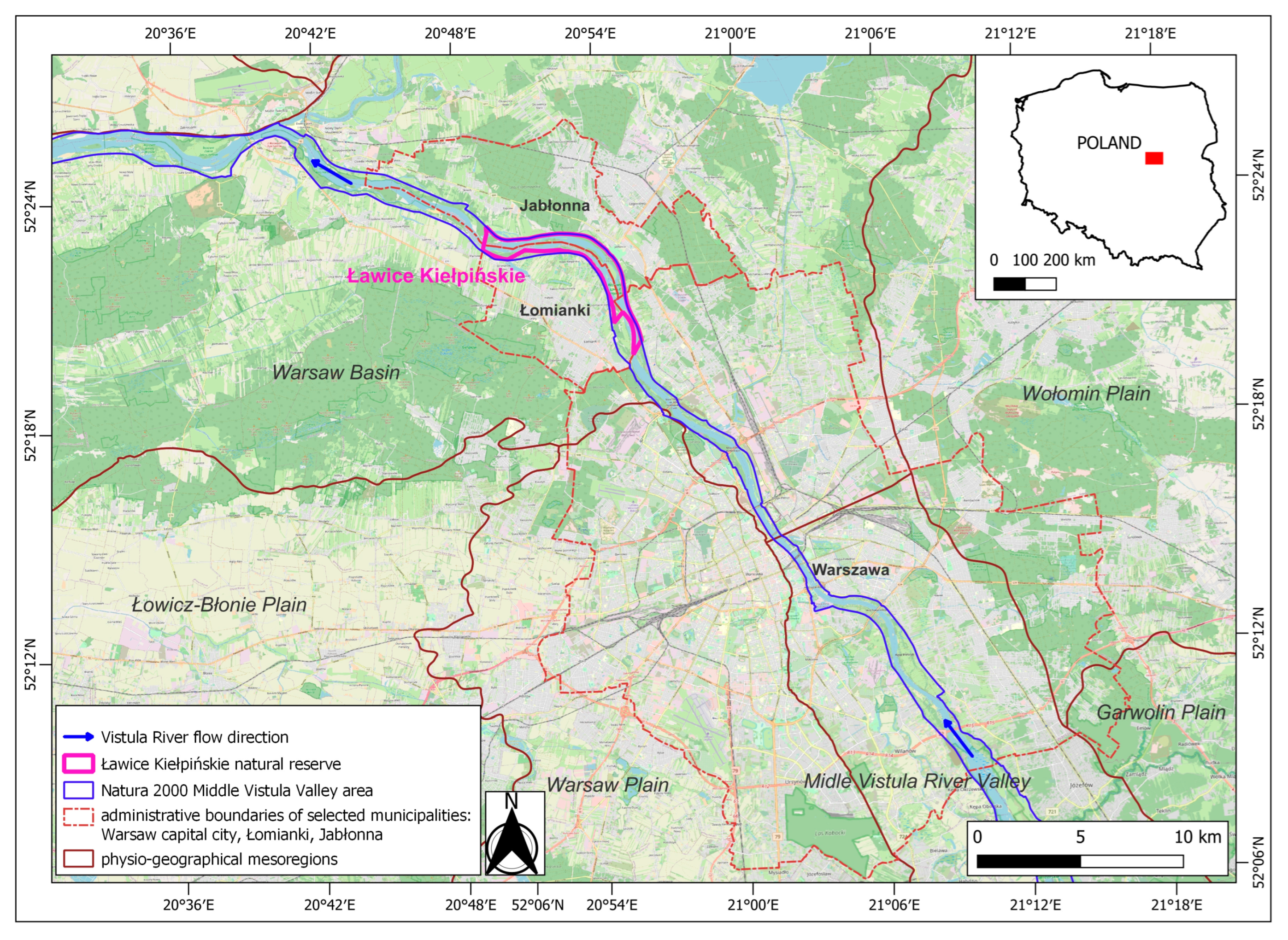
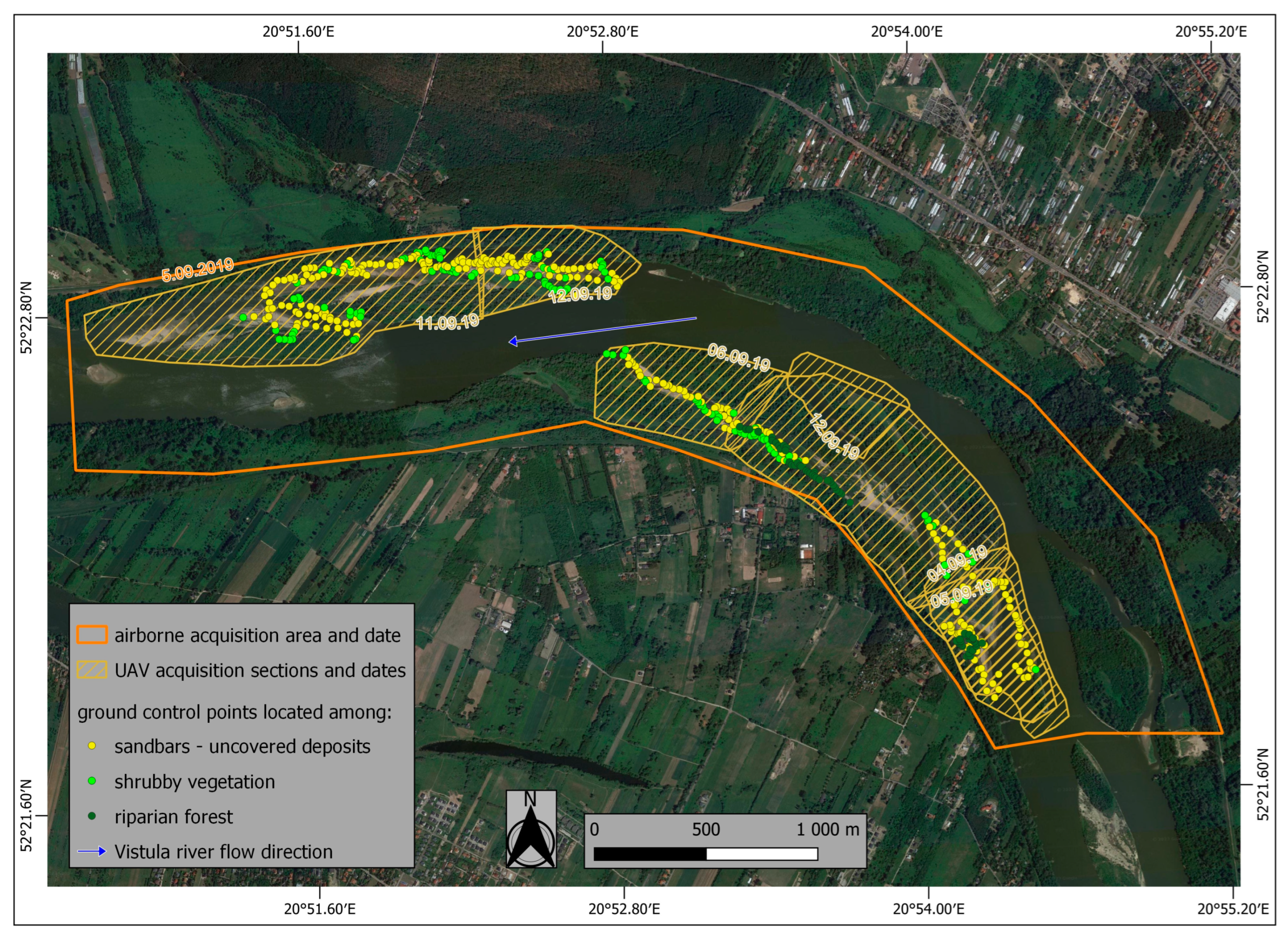
The main objective of this paper is to assess and compare the accuracy of state-of-the-art remote sensing (RS) technologies in generating DEMs at centimetre precision for fluvial landscape characterization and monitoring at a large scale. An airborne ALS campaign was flown to cover an area of about 3.0 square kilometres (km2). In the same period, an extensive multi-mission UAV campaign was performed over the same area, with UAV-LiDAR and RGB sensors, and an acquisition with Pléiades-1 in stereo mode was tasked. The field campaign was completed by a ground control points measurement campaign with the GNSS RTK system (GPS + GLONASS measurements), resulting in 516 points to be used for error assessment and comparison. These points were collected on the three main land-cover classes that shape the riparian corridor and that are of particular importance for river landscape monitoring: forest, shrubs, and sediment bars. The large amount of data collected allowed for an exhaustive comparison of LiDAR technology against DAP techniques acquired from either UAV or satellite (Pléiades in this case). Besides, UAV-LiDAR was assessed against airborne LiDAR. The findings of this assessment are extensively presented and discussed in the next sections of the presented paper.
3. Results
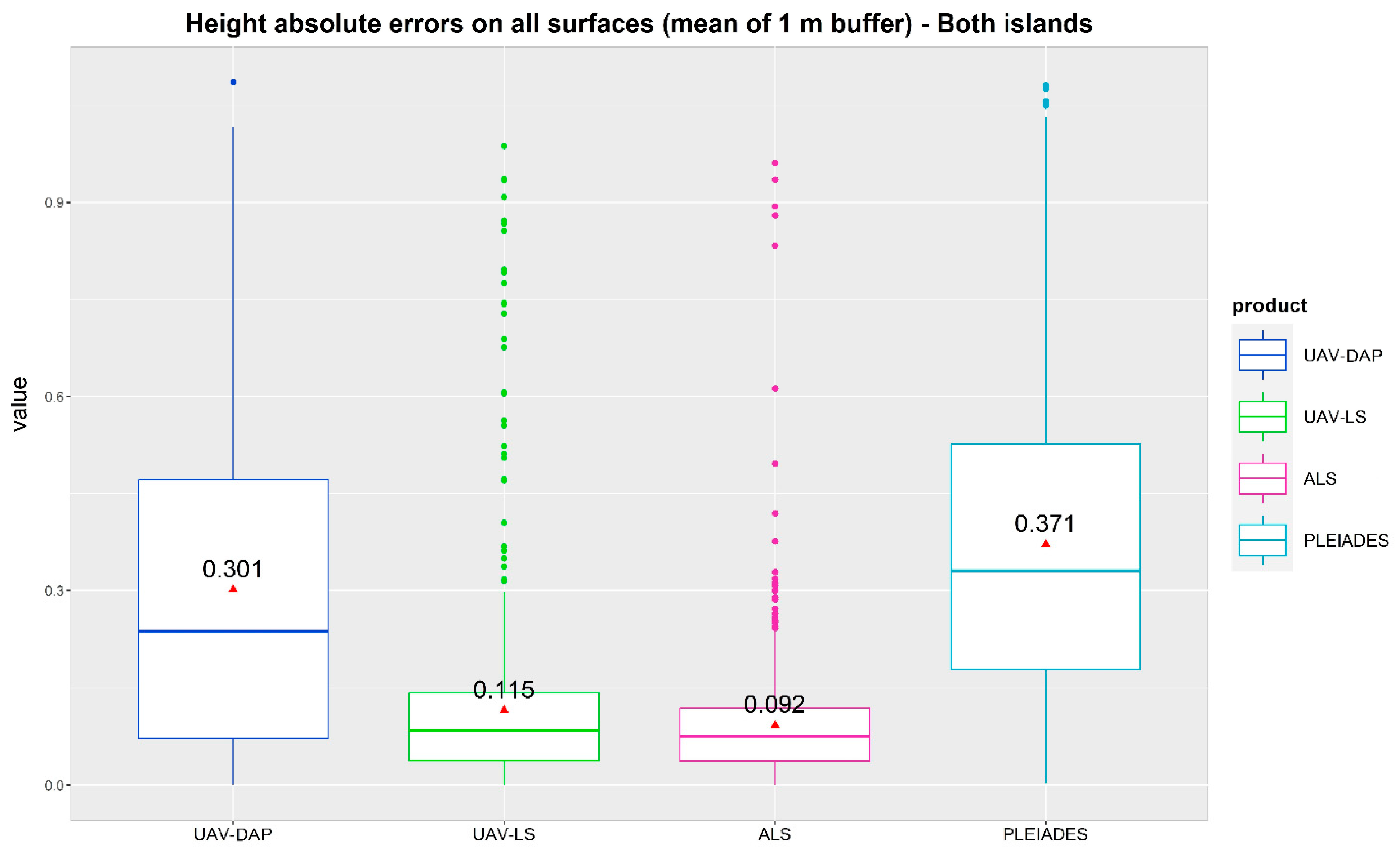
Figure 8 presents a first comparative assessment of mean height absolute errors of all DEMs made with the previously described platforms and sensors, namely: UAV-DAP, UAV-LS, ALS, and Pléiades. The lowest absolute errors were measured for airborne LiDAR data (ALS) with a mean error of 9.2 cm. Very similar accuracy was achieved by the UAV platform, where discrepancies from the field measurement average around 11.5 cm. The magnitudes of the standard deviation of the discrepancies are the smallest for DEMs generated from LiDAR data from both platforms, as compared to DAP techniques. In the case of the UAV-DAP photogrammetric model, the deviations are much larger. The second quartile of error values accommodates deviations in the order of 15 cm downwards relative to the median, while the third quartile of error values accommodates deviations of as much as 20 cm upwards relative to the median. The mean absolute error is 30 cm, however, the median error is a few centimetres less.
The photogrammetric model based on Pléiades imagery has the worst accuracy, carrying a mean absolute error of 37 cm and a median of around 33 cm, with the second quartile containing deviations of about 15 cm down from the median and the third quartile with deviations of more than 15 cm up from the median. On the other hand, the model extracted from the UAV-LS data relatively brings about the most outliers. They reach 80 cm or even more relative to the median. In second place in terms of the number of outliers is the ALS-derived DTM. In the latter case, however, the outliers are mostly clustered closer to the box and whiskers of the boxplot—predominantly with error values of around 30 cm (20 cm from the median), however in this case outliers that reach 80 cm can also be found.
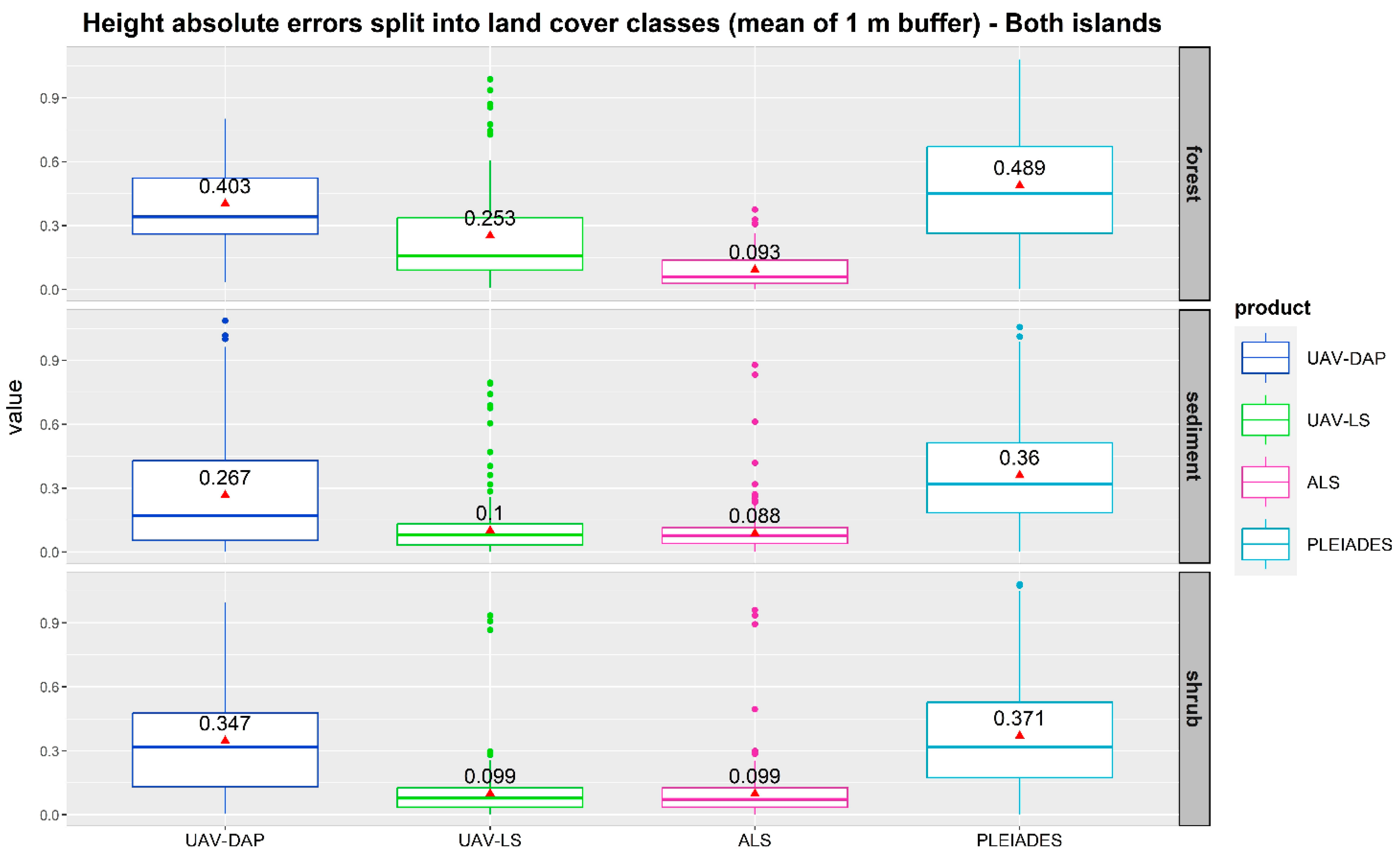
Figure 9 presents the results of the mean absolute error assessment, grouped by the different land cover classes that were sampled by the field GCPs. It confirms that the LiDAR-based DTMs are significantly more accurate when compared to DTMs obtained from DAP techniques, despite the platforms used and the land-cover types analysed. The UAV-LS or ALS-based DTMs perform way better than the UAV-DAP or Pléiades-based DTMs. Moreover, both LiDAR-based DTMs are very similar in terms of accuracy, underlying the similar precision of LiDAR sensors measurement.
The mean absolute error of the UAV-DAP model is 26.7 cm for the uncovered sandbars, 34.7 cm for shrub-covered areas, and 40.3 cm for the woods. In the meantime, the median error is only around 15 cm in sandy areas but reaching more than 30 cm in areas covered with shrubs or forest. This slight discrepancy between the mean and median indicates that for uncovered areas the errors are less numerous, but those that do occur, overestimate the measurement value more strongly (they are more deviate).
The mean absolute error of the UAV-LS model is 10 cm both for the uncovered sandbars and for the sites on islands with shrub cover, however, it exceeds 25 cm for the measurements in the woods. In the former case, there is almost no discrepancy between the mean and median errors, but in the latter, the median error is about 10 cm lower than the mean. Such a relationship indicates that DTMs derived from different input data and processing methods are characterised by a lower accuracy of ground terrain height measurements in places where the structure of the vegetation cover may interfere with ground imaging and height measurement.
On the other hand, the ALS DTM has an accuracy of 9.3 cm in the forest class, indicating the better capability of the ALS sensor to penetrate the vegetation canopy as compared to the UAV-LS sensor. This can be explained by the multi-reflectivity of ALS, which significantly increases the canopy penetration capacity compared to a single-beam scanner mounted instead on the UAV.
The LiDAR measurements generally bring a small standard deviation of error—DTM errors of a few centimetres are in the second and third quartiles (altogether making 50% of error values), only except for forest areas, where in the third quartile there are errors reaching about 15 cm above the median. The photogrammetric DTMs bring errors with larger standard deviations—in the third quartile there are errors reaching up to 30 cm from the median on uncovered sandbars and in the second quartile there are errors of around 20 cm below the median on shrubby areas. However, outliers of up to 1 meter (in the woods) or 80 cm (in the shrubs) relative to the median also occur for the UAV-LS model. This is due to the already-mentioned influence of vegetation cover.
The DTM obtained from ALS performs overall better than all the others, with an accuracy of around 9 cm for all validated land cover classes. In contrast, the DTM produced Pléiades imagery has a median error of as much as 36 cm for uncovered sandy sediments, 37 cm among the shrubs, and 49 cm among the woods. In all cases, the median error is almost the same as the mean (1–3 cm lower). The satellite model also yielded considerable standard deviations of error in the cases of all land cover classes (in the third quartile there are errors about 20 cm larger than the median, and in the second quartile there are errors about 15 cm smaller than the median).
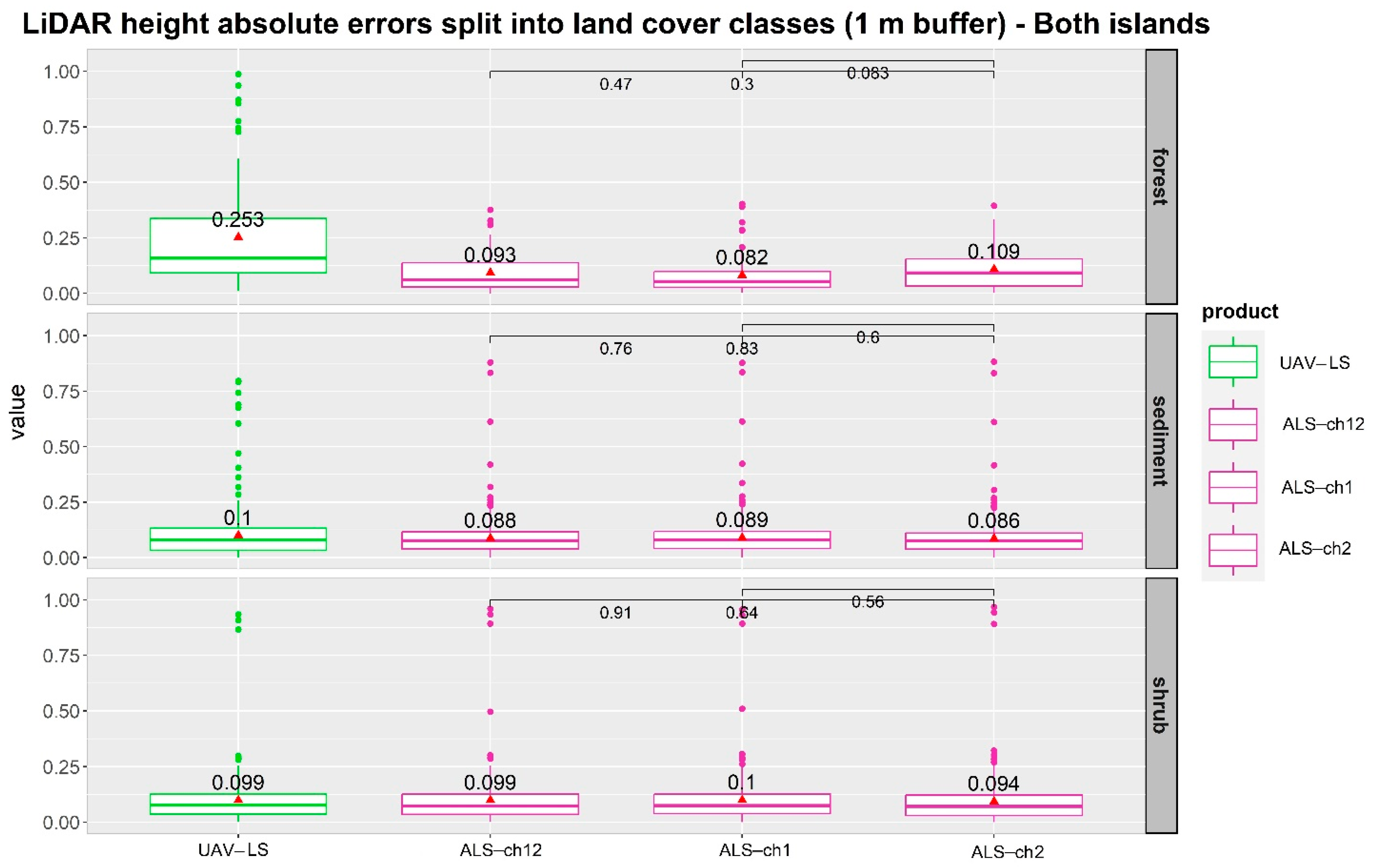
The last boxplot graph (
Figure 10) compares the accuracy of DTMs obtained from the two LiDAR sensors, mounted on a UAV and an airplane, respectively. For the airborne-based LiDAR, the errors are presented for models obtained by using spectral channels 1 and 2, only channel 1, and only channel 2, respectively. This exercise aimed to check if the dual-channel LiDAR sensor might bring added value to the DTM computation, especially in penetrating the forest canopy.
The differences in the magnitude of the absolute error are small and very similar in most cases, ranging, for the ALS-based DTMs, between 8.2 and 10 cm for all land cover classes, despite the different spectral channel combinations used to obtain the models. The small error differences are confirmed by the statistical significance test (plotted in the graphs), which always give values above 0.05, hence demonstrating the non-statistical difference. The only significant difference occurs for the riparian forest areas, as previously reported in
Figure 9, where the mean absolute error magnitude reaches 25 cm for the UAV-LS model, while for the ALS-derived models, it is within the limits of 8–11 cm.
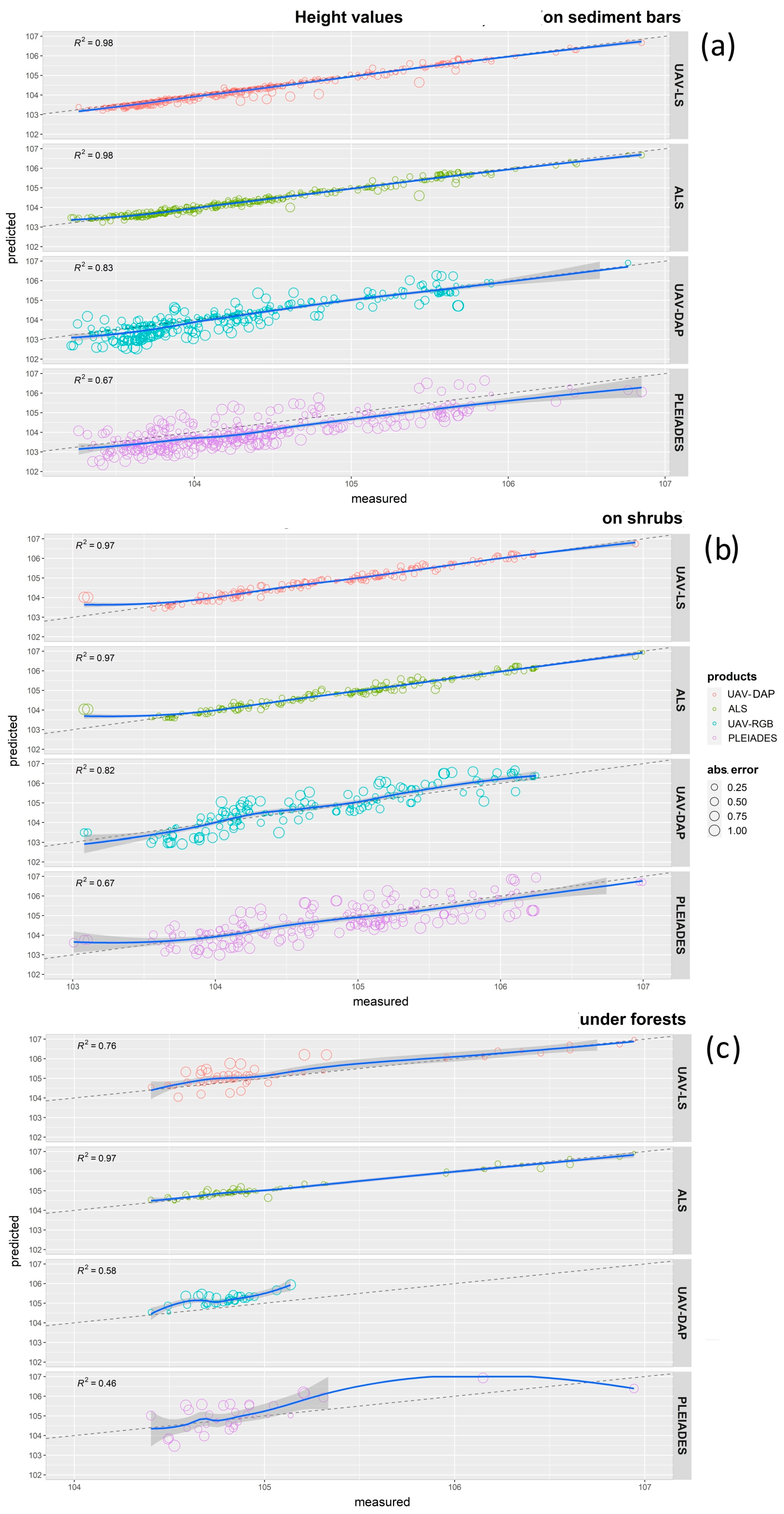
The scatterplots in
Figure 11 show the distribution of predicted height values by different DTMs with respect to the distribution of heights, as measured in the field over the 516 GCPs. Results are plotted by the three different land cover classes.
For the sandbars (see
Figure 11a), the curves have values with a very high fit to the linear function in the case of UAV-LiDAR and Airborne LiDAR, where in both cases R
2 = 0.98, while the fit for the photogrammetric models is at a lower level: R
2 = 0.83 for the UAV-DAP, and at only R
2 = 0.67 for the Pléiades. The highest frequency of high absolute error (0.5 m or more) is found for the Pléiades data, and secondly for the UAV-DAP data. It should also be noted that UAV-LS yielded a slightly higher number of such significant absolute errors than ALS.
Characteristics similar to the above are found in scatterplots for shrub-covered areas (
Figure 11b), where the value of the fit of the regression curve to the linear function is: R
2 = 0.97 both for ALS and UAV-LS, R
2 = 0.83 for the UAV-DAP, and R
2 = 0.67 for the satellite model. The only noticeable difference is that for the shrub class, individual observations bend the regression curves more for lower elevation values (for all models), although there are more measurements taken at lower elevations (exposed areas) on uncovered sandbars.
The forest patches (
Figure 11c) yield quite different scatterplot characteristics. In this case, the ALS model has an almost perfect match with the ground measured values (R
2 = 0.97), significantly ahead of the UAV-LS (R
2 = 76), while significantly less accurate are the UAV-RGB (R
2 = 0.58) and the Pleiades (R
2 = 0.46), where we find numerous absolute error values deviating more than 50 cm or even more than 75 cm from the field GCPs.
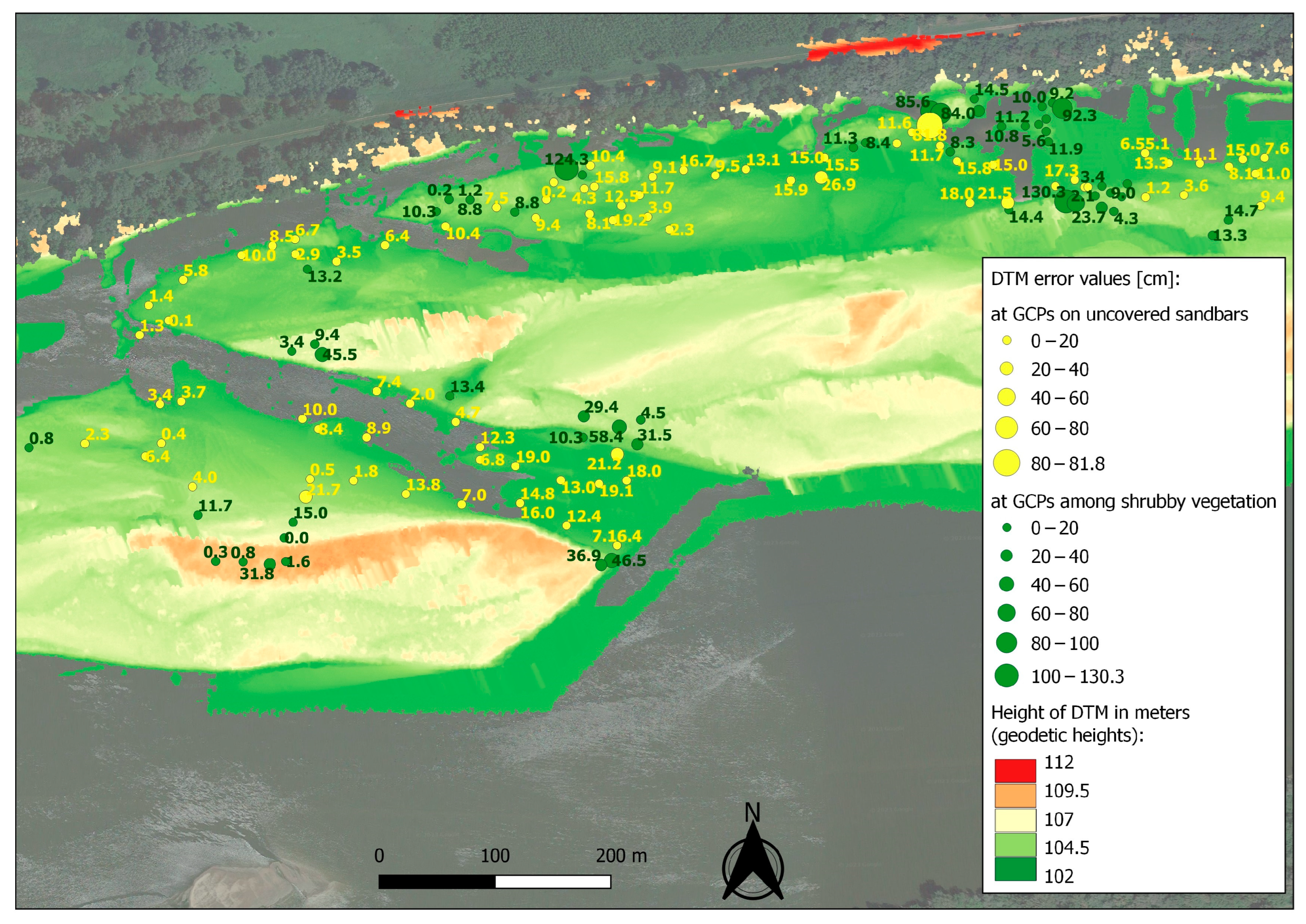
The spatial distribution of errors throughout the area is illustrated in
Figure 12, for example, over the Northern Island (its central-western part) for the DTM derived from UAV-LiDAR data. There is a slight correlation visible between errors and locations—in terms of the height of terrain above the river water table, as well as vegetation cover or lack thereof. Namely, lower-lying sites on the exposed sandbars are characterised by small errors, for the vast majority of a few or a dozen centimetres, and in the island section presented here not reaching anywhere above 30 cm (except for one outlier). Meanwhile, among the GCPs distributed among the shrub vegetation on the islands, most errors are similarly low as for the uncovered sandbars, with a number of observations where the error magnitude approaches 0 cm, however, there are also a few outlier errors exceeding 80 cm or more.
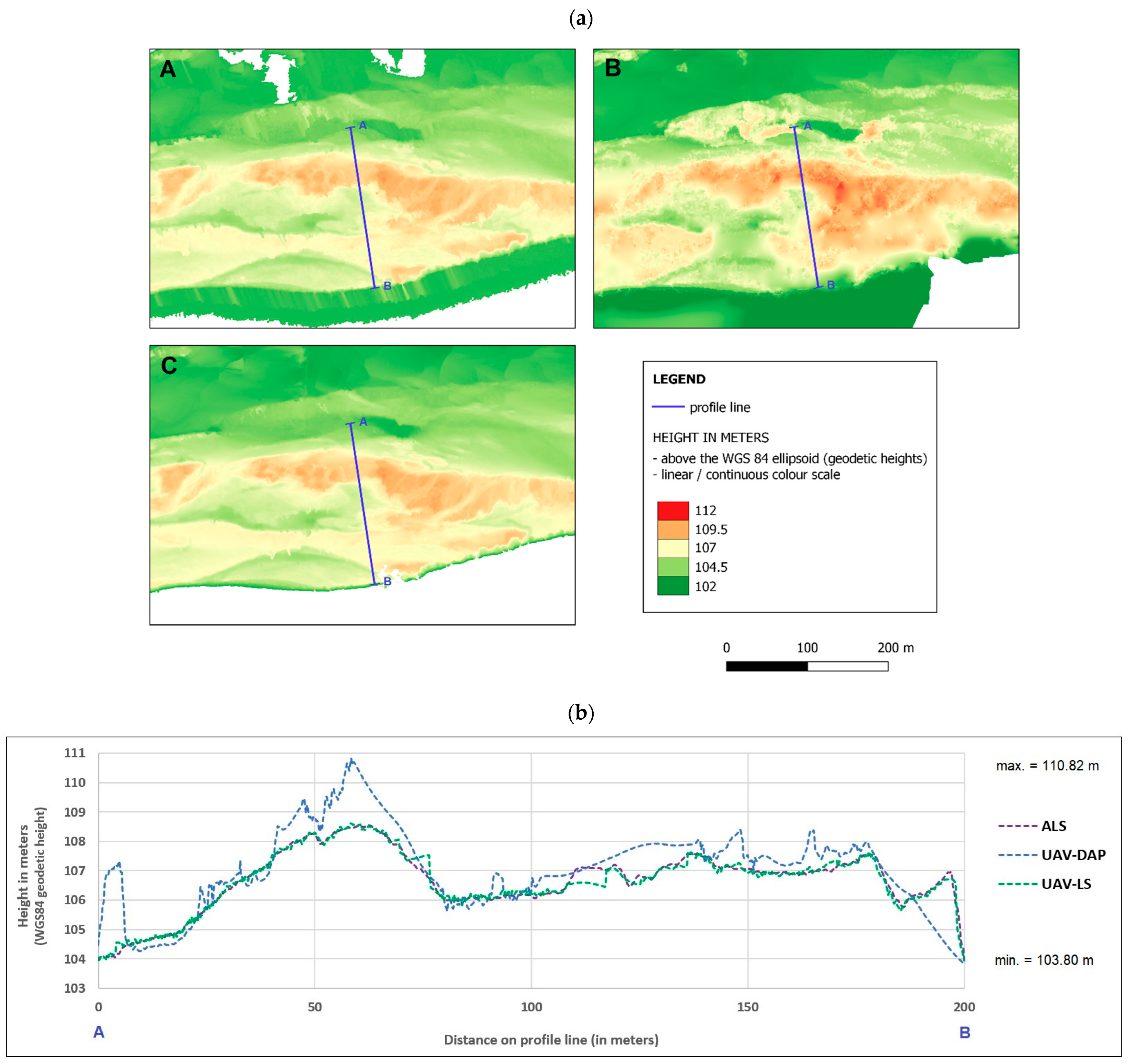
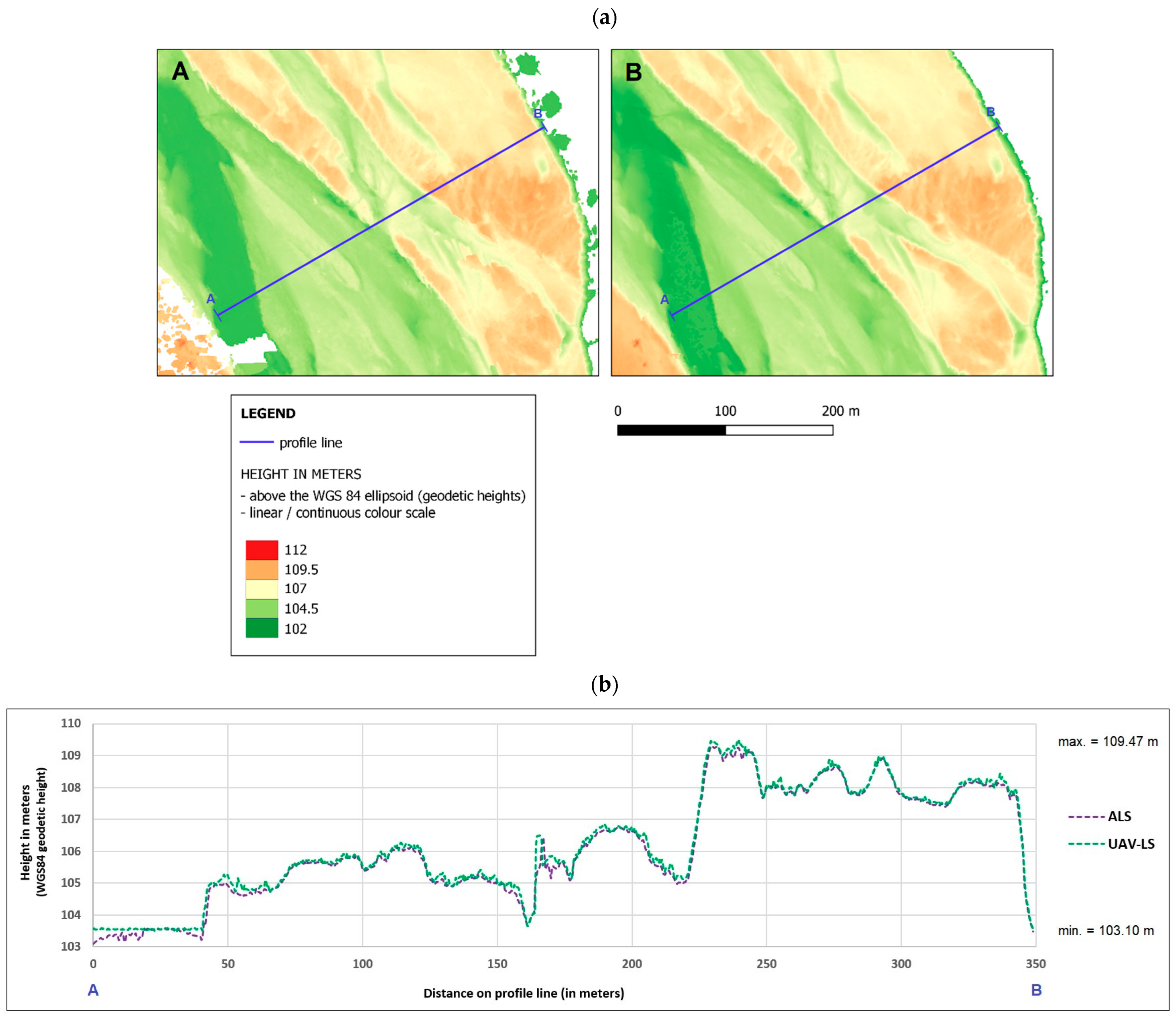
Finally, a profile graph comparison was made for the digital elevation models derived from different data sources in two selected and representative cross-sections of both islands.
Figure 13a presents a cross-section for the Northern Island and
Figure 13b shows the profile graph in this cross-section for both UAV-derived DTMs and the airborne DTM.
Figure 14a presents a cross-section for the Southern Island instead, and
Figure 14b shows the profile graph in this cross-section only for the two LiDAR DTMs. Finally,
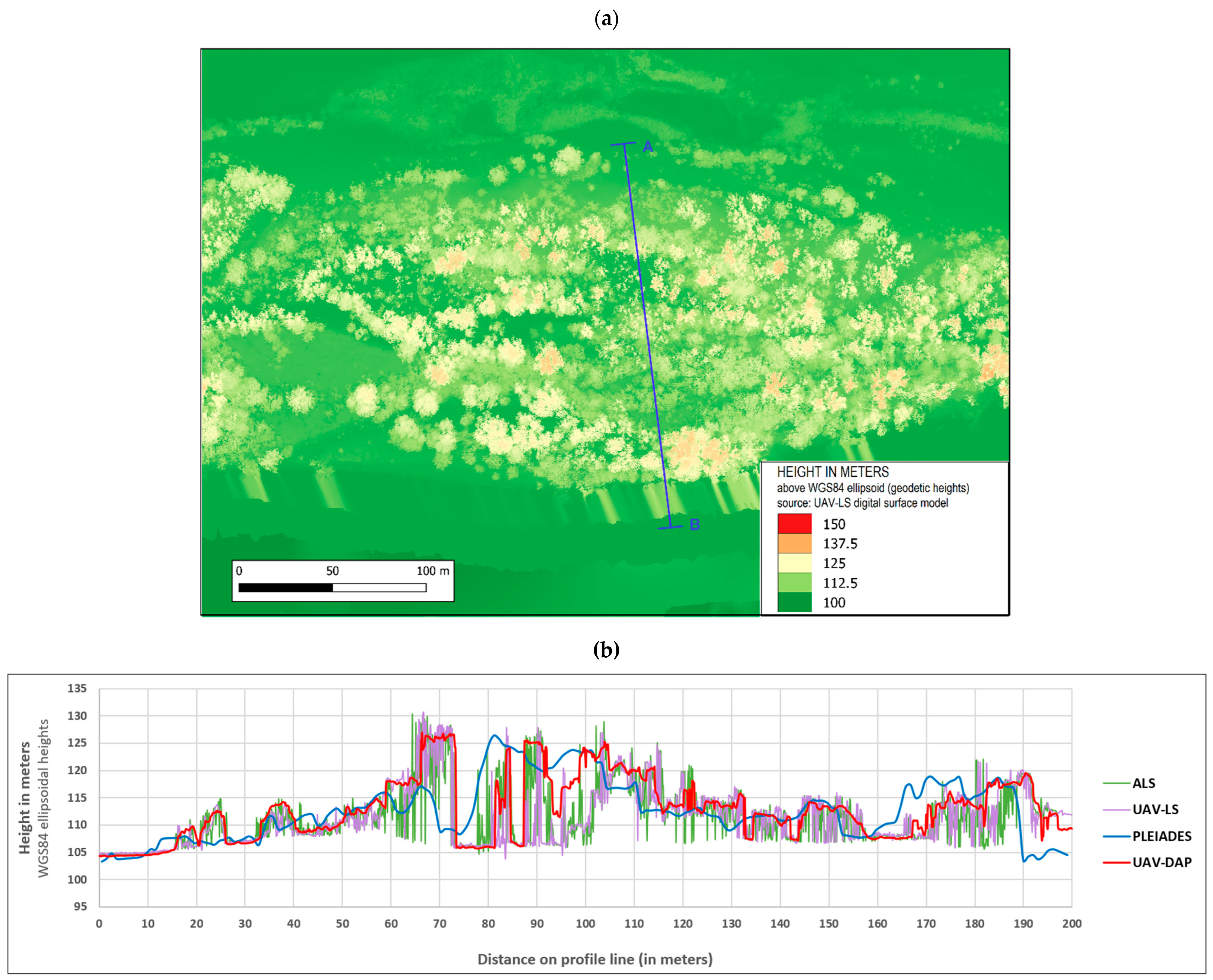
Figure 15a shows a cross-section of the Northern Island, for which a profile graph for four DSMs has been presented in
Figure 15b.
The details of the profiles show that both LiDAR-derived DTMs (ALS and ULS) carry almost the same level of accuracy. While in
Figure 13 they are compared with the UAV-DAP DTM, in
Figure 14 only the terrain profiles from the laser scanning “point cloud” models are intentionally shown.
Figure 13 reveals that the UAV-DAP model diverges much from the others, and usually overestimates, both in elevated places (island ridges)—on sediment bars with lots of shrubs and short vegetation—and in depressions, especially at the land-water boundary where elevation anomalies might occur as a result of the photogrammetric process.
Meanwhile, the comparison of the four DSMs presented in
Figure 15 reveals similar problems on the water-land margin, especially for the Pléiades model. It can be seen that, on average, it exaggerates the height of the terrain (as shown earlier in
Figure 8,
Figure 9 and
Figure 11) in the low-lying locations. On the other hand, the highest elevations on islands (their ridges) often have lower elevations on the satellite model than on the other DSMs. From the DSM-derived profile, a varied vertical structure of vegetation on the islands can also be seen. What is also particularly important and visible in
Figure 15, as in
Figure 14, is an almost perfect match between the ALS and UAV LiDAR measurements.
4. Discussion
When it comes to mapping the topography of the terrain, airborne laser scanning (ALS) currently still represents the “state-of-the-art” in terms of LiDAR sensor quality. However, in this paper we showed the potentialities of much cheaper UAV-based LiDAR sensors, being able to reach similar accuracies at a lower cost. Aircraft-based measurements and imaging may be considered more suited for regional scale surveys, while UAV is naturally better suited for local scale projects. The major advantage of UAVs is the flexibility of these platforms to acquire imagery data, especially for small to medium size areas (from less than 1 km
2, up to 7 km
2) [
44]. When it comes to cost-effectiveness, UAVs might become competitive if they were operating at approximately 300 m above ground level, while at approximately 600 m altitude the piloted platforms lead to a lower cost of operation [
45]. The problem is that the current aviation safety regulations often pose limitations to UAV operations. Although technological regulations in the field of UAVs increasingly improve the reliability of drones, there is still a human factor, i.e., mistakes caused by the operators, resulting in potential collisions with airplanes and man-made constructions. The appropriate adjustment of the law to the changing realities, including the elimination of unnecessary exclusions of areas from UAV operation is still a challenge.
The second aspect we considered was a comparison of measurements taken from the same flying platform but with different sensors: laser scanning and optical imaging in the RGB spectrum. According to the literature, LiDAR measurements have better accuracy than photogrammetry, especially in natural environments with dense vegetation, such as the forest ecosystems. UAV-DAP as a method for constructing of DTMs was evaluated by different authors as a less reliable technique compared to LiDAR, especially in the case of woodlands [
17,
26,
27,
29]. Our study confirms this, however to be specific—ULS performed worse than ALS due to the more limited capabilities of the scanner mounted upon the UAV in mapping dense, multi-level canopy.
In the case of low vegetation, we managed to reach twice the vertical accuracy criterion of the LiDAR digital terrain model assessed with RTK GPS and total station measurements as Stal et al. [
46] reached with airborne laser scanning over meadows (20 cm). Salach et al. [
28] indicate that DEM constructed based on UAV-DAP can be three times less accurate than a UAL-based DEM for an area with low vegetation. The difference obtained in our case study between LiDAR and photogrammetric method on sandy and low vegetation areas is in line with this value reported in [
28]. In the case of grassland vegetation, UAV performs well as a data collecting platform (canopy height, biomass, and vegetation cover), however the “structure from motion” (SfM) approach to obtain an image-based point cloud is often used (matching pixels of overlapping images to reach the 3D structure of a concerned object) [
47,
48]. As Polat and Uysal [
25] suggest, for relatively small study areas, UAV photogrammetry with SfM approach can even supply digital elevation models as accurate as airborne LiDAR. In their study, UAV-DAP DTM yielded the second most accurate result (RMSE) among the four ALS-based DTMs.
The whole area of the riverine islands is affected by dynamic geomorphological processes, such as bank erosion and overbank deposition, however, the deposition occurs there during floods only. Nevertheless, the collected height data came from a very short period of one summer season only, during very similar low water levels. For these reasons, we did not expect to see any significant impact of morphometric parameters (such as river slope, channel shape index, or exposition and angle of the slope forming the banks of the river channel and islands) on the distribution of errors.
It should also be highlighted that the higher accuracy of DTMs produced in our study from the LiDAR data is the result of using more points for interpolation compared to the photogrammetric elevation models. In other words, for digital elevation models with the same declared resolution, the point clouds from laser scanning are denser than the “image point clouds” that are an intermediate product in the photogrammetric process. To obtain higher density point clouds with photogrammetry, a much higher number of RGB images would be necessary, drastically increasing the number of flights required to cover such a large area, hence limiting de facto the realistic operability and usability of such technique for real large applications and operations, such as the one presented in this paper.
Simpson et al. [
18] highlight the need for sufficiently dense distribution of ground control points for DTM extraction from ALS point clouds and their assessment in forest environments, especially in areas where undergrowth or ground cover vegetation is prevalent. For studies that require high DTM accuracy, it is recommended that extensive ground control points are used across a range of vegetation structures to assess the accuracy of DTMs, in order to account for biases caused by vegetation cover. Precautions for the greatest DTM errors should be taken in areas characterized by dense ground-cover vegetation since ground returns are most likely to be obscured here. These areas could easily be identified using even a simple canopy height model. Future studies should aim to quantify these DTM biases.
The authors of this paper find similar problem with UAV-LiDAR measurements in the dense forest canopy, namely, inability to collect reliable GNSS ground control points. The general observation is that only UAV-LiDAR and ALS-LiDAR are suitable for measuring the height of riparian vegetation, since with photogrammetry, using RGB images, only the tops of the trees can be seen. On the other hand, the vast majority of our field measurements (collecting ground control points) were taken among low vegetation and on surfaces of bare, newly deposited, so a full assessment of the quality of individual digital elevation models among the willow stands (the woods) on the islands is not possible.
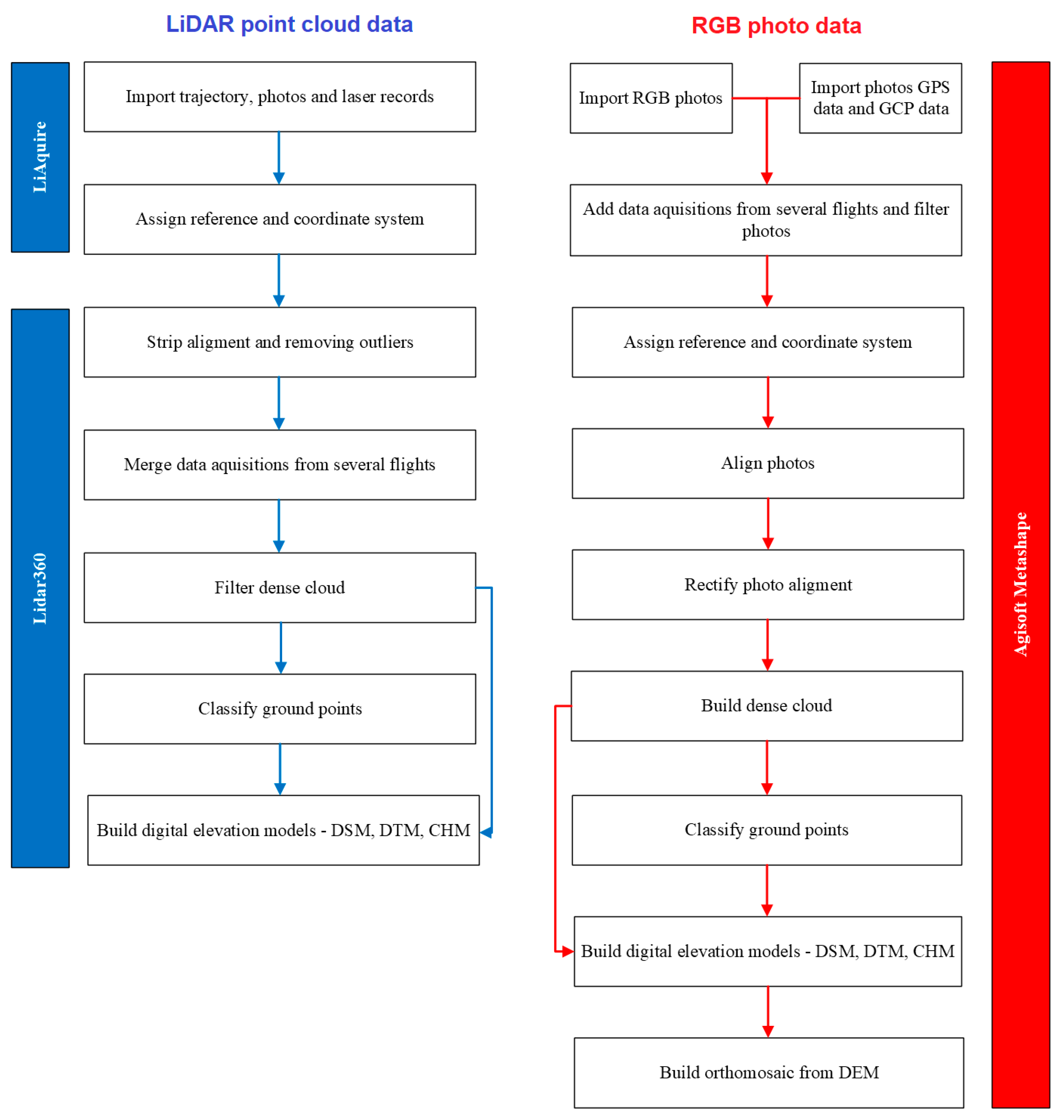
The effective processing of the raw LiDAR data—data filtering, interpolation methodology, DEM resolution choice, LiDAR data reduction, and the subsequent generation of an efficient and high-quality DEM, remain a big challenge. One of the most critical and difficult steps is the classification of LiDAR points into ground and non-ground points [
49]. However, the issues of selecting data processing procedures and algorithms to generate optimal DTMs—except for the basic choice of interpolation methods and model resolutions—were not analysed in detail in this article. This issue is a subject of other research and will also be of interest in future methodological studies planned by the authors.
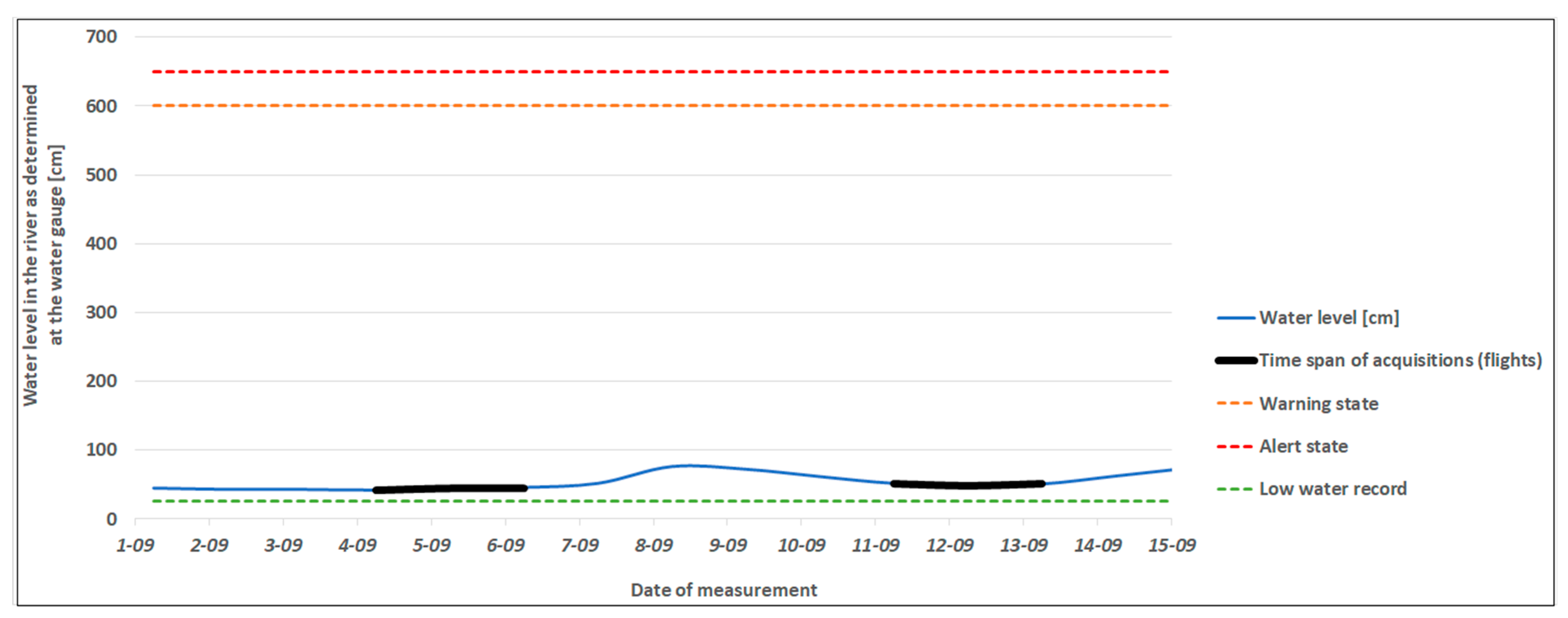
All the acquisitions of the data presented in this paper were performed during low water levels in the Vistula River. In such condition, four different geomorphological units can be distinguished as easily seen in the field: (1) floodplain above channel banks, (2) riverine islands, (3) sandbars, and (4) bottom of the active channel. From a geomorphological point of view, the most challenging goal is mapping the two lowest units, namely: (3) the sandbars and (4) the bottom of the active channel. Unfortunately, the active channel is completely covered by flowing water even at very low water stages. Sandbars (actually more elevated among those landforms) are exposed during low water stages, thus they can be surveyed by remote sensing. Repetitive measurement of sandbars enables determining the dynamics of these landforms and drawing further geomorphological implications, e.g., sediment budget calculation [
50,
51].
Geomorphological mapping of the channel heads in the headwater of the Vistula River in the Eastern Carpathians indicates that detailed morphometric analysis of small fluvial landforms is more accurate on the TLS (terrestrial laser scanning) DEM than ALS DEM [
52]. In the case of our study area, it is a discussable opinion that TLS might be more suitable for mapping whole islands, however, small microforms, such as cut banks of the channel and especially cut banks of the islands, can indeed be better revealed with TLS scanning [
53]. However, in an area the size of our case study we expect to obtain similar results with the use of ULS. It has been proved by Crespo-Peremarch et al. [
29] that the ALS technique produces DEMs with an accuracy similar to those generated with TLS.
The origin of the studied islands is not related with floodplain excision, which forms a large and old island in an anabranching river [
54], but rather with sandbar colonization by vegetation [
55]. Assessment of different RS techniques for geomorphological purposes should therefore include an issue of projection of the vegetation on DEM [
56]. According to the results of our study, in the case of geomorphological analysis of exposed sandbars, UAV–LiDAR seems to be the recommended option due to the dense point cloud it generates. Meanwhile, in order to show the structure of vegetation it is important to have good laser penetration and the possibility of multiple reflections, including the last one from the ground. The ability for canopy penetration of ALS seems to indicate it as the best technique in this respect.
5. Conclusions
The main conclusions are as follows. With the use of unmanned aerial vehicles (UAVs) we can obtain high quality measurements, however there are still several problems and limitations to overcome: (1) limited area coverage per single flight given the possible flight times, and the resulting labour intensity—resulting in a need to do many flights, as opposed to airborne missions which allow covering the same area in a much shorter time (e.g., 1 day of measurements vs. 1 week of measurements), (2) current national and international regulations for civil UAV operation, in particular, the allowed flight altitudes, (3) influence of the weather conditions on the measurement results and the need for their repetition—however this problem applies both to the drones and to the aircrafts, and (4) technical competitiveness of the sensors (laser scanners, cameras) mounted on airplanes and drones—although those fitted to UAVs are becoming increasingly better and almost comparable in quality to the sensors on aircrafts, at the same time bringing cost savings.
For the data analysed in this case study, i.e., a landscape dynamically shaped by fluvial processes, it shall be stated that digital elevation models based on laser scanning data (point clouds) give very good results, low absolute errors, and are more accurate than photogrammetric models. While the average absolute height error of the laser scanning DTMs oscillated around 8–11 cm for most surfaces (being higher only in forested areas), photogrammetric DTMs from UAV and satellite data gave errors averaging more than 30 cm. What is noticeable, airborne and UAV LiDAR measurements brought almost the perfect match. For the UAV-DAP model, the error was on average 25–40 cm and increased with the density and height of vegetation cover. The LiDAR measurements also brought a smaller standard deviation of errors compared to the photogrammetric DTMs. For example, for the ULS model, errors of a few centimetres accounted for 50% of error values for both uncovered sandbars and vegetated areas, while for the UAV-DAP model in the same 50% extent, there were errors deviating 20–30 cm from the median.
Despite the downsides of using UAV-LS for operational purposes described above, in this work it has been demonstrated that it is possible to generate DEMs over quite a large area of 3 km2, characterized by highly dynamic fluvial landscape, with a very high accuracy by using a much cheaper LiDAR instrument as compared to ALS. The generated DEMs over this area (especially large as for UAV mission) were assessed by a very solid validation campaign, consisting of more than 500 manually collected ground control points, resulting in an overall average error of only about 9 cm. Unfortunately, at the land-water margin, these results deteriorate, but not as drastically as for DEMs generated from RGB imagery, which was also expected due to the LiDAR limitations on water surfaces. At the same time, LiDAR-based models are also much better for penetrating tree-covered terrain, although in this study we only surveyed small forested areas, due to problems with accessibility and the loss of satellite signal under dense canopy cover.
To conclude, it can be expected that, given the high measurement reliability of this technology and the increasing operational capabilities of small civil UAVs and LiDAR sensors mounted upon them, this will potentially lead to their integration with other technologies to be deployed for operational monitoring of fluvial processes by river water authorities in charge of river geomorphological monitoring activities.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














