
An Operational Processing Framework for Spaceborne SAR Formations


Abstract
:1. Introduction
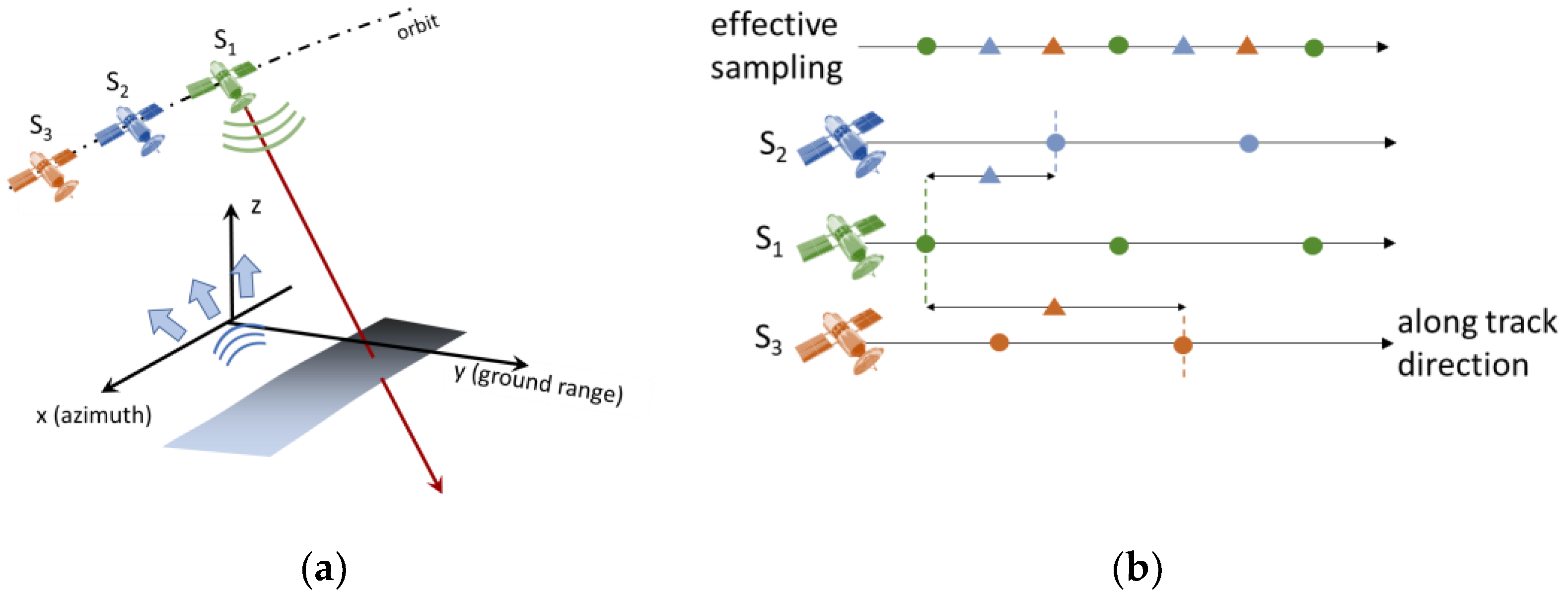
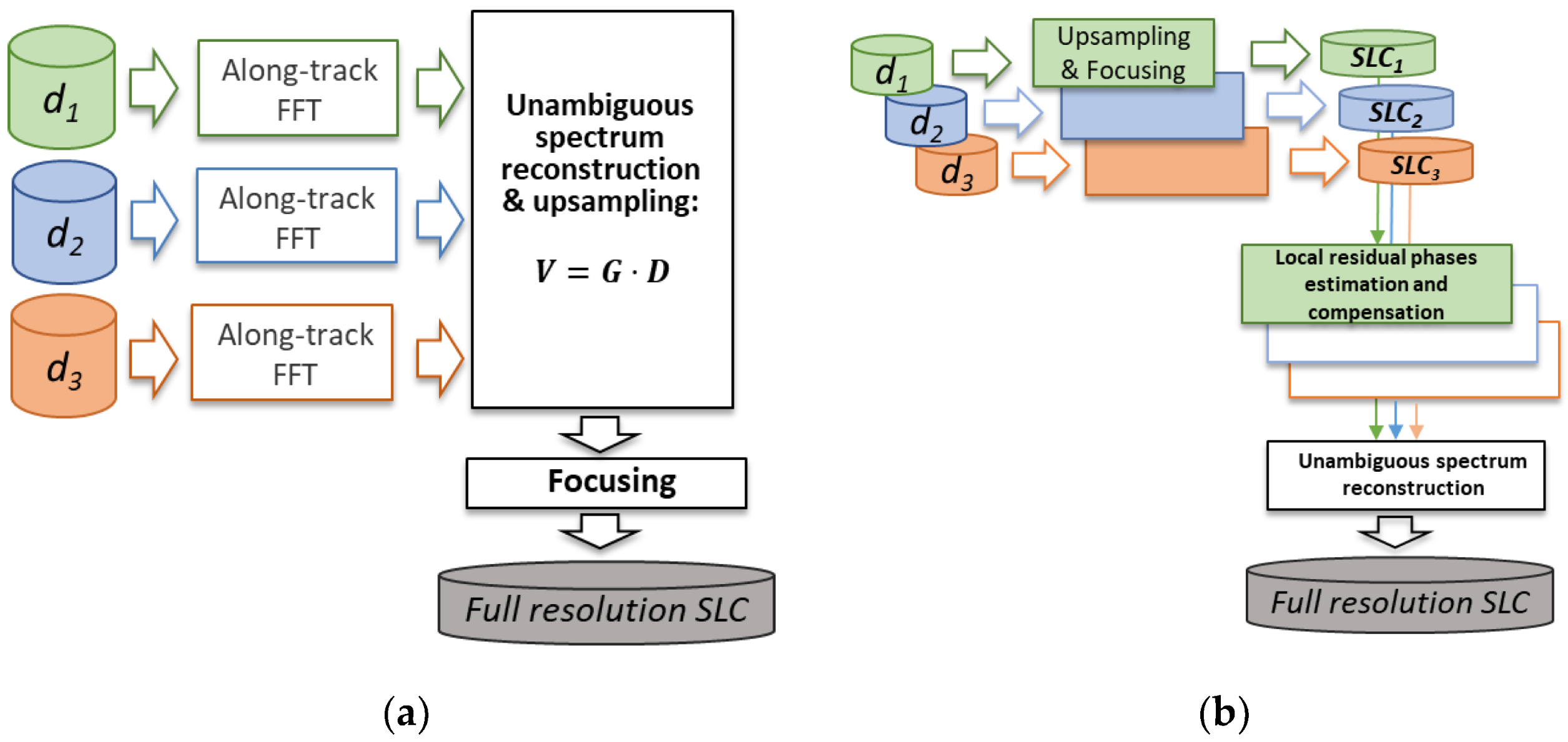
2. Multichannel Processing of Data from Compact SIMO Formation
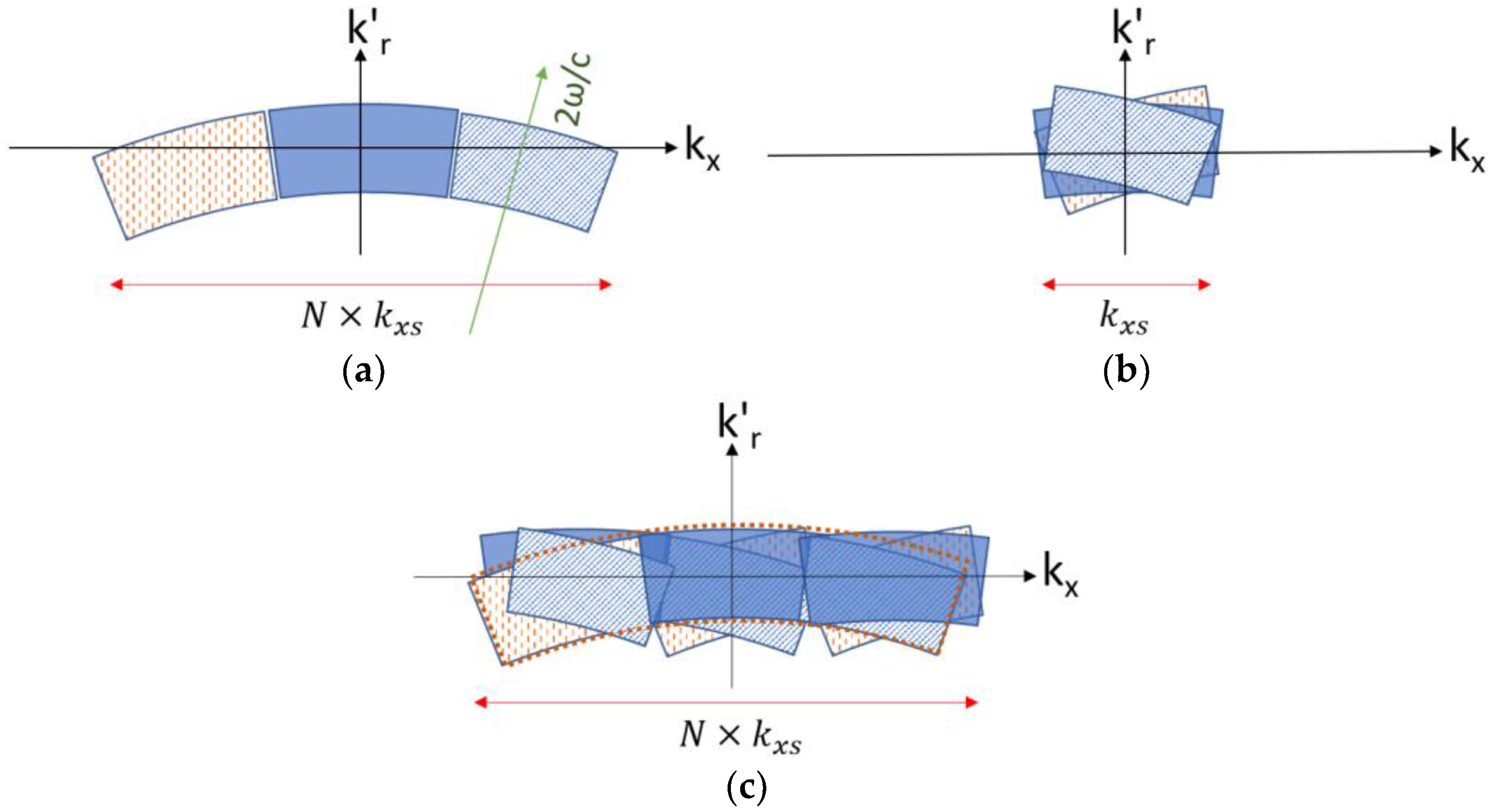
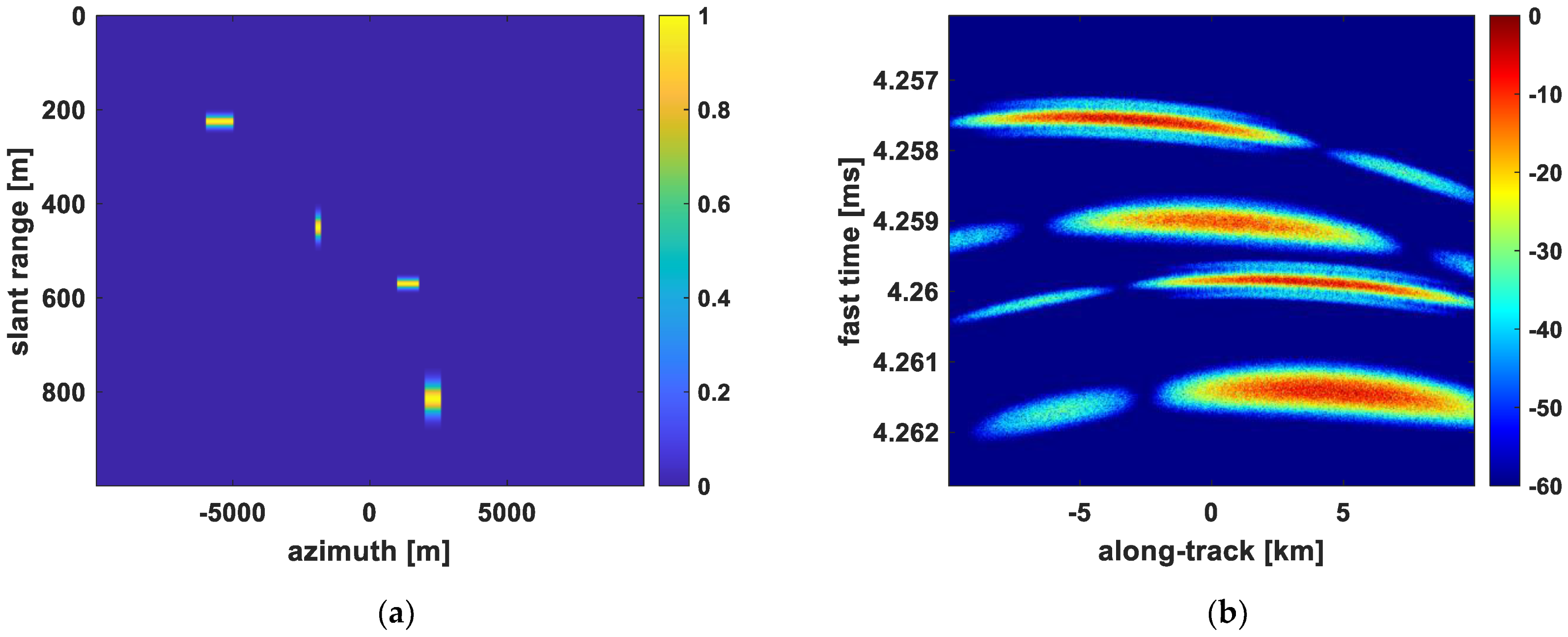
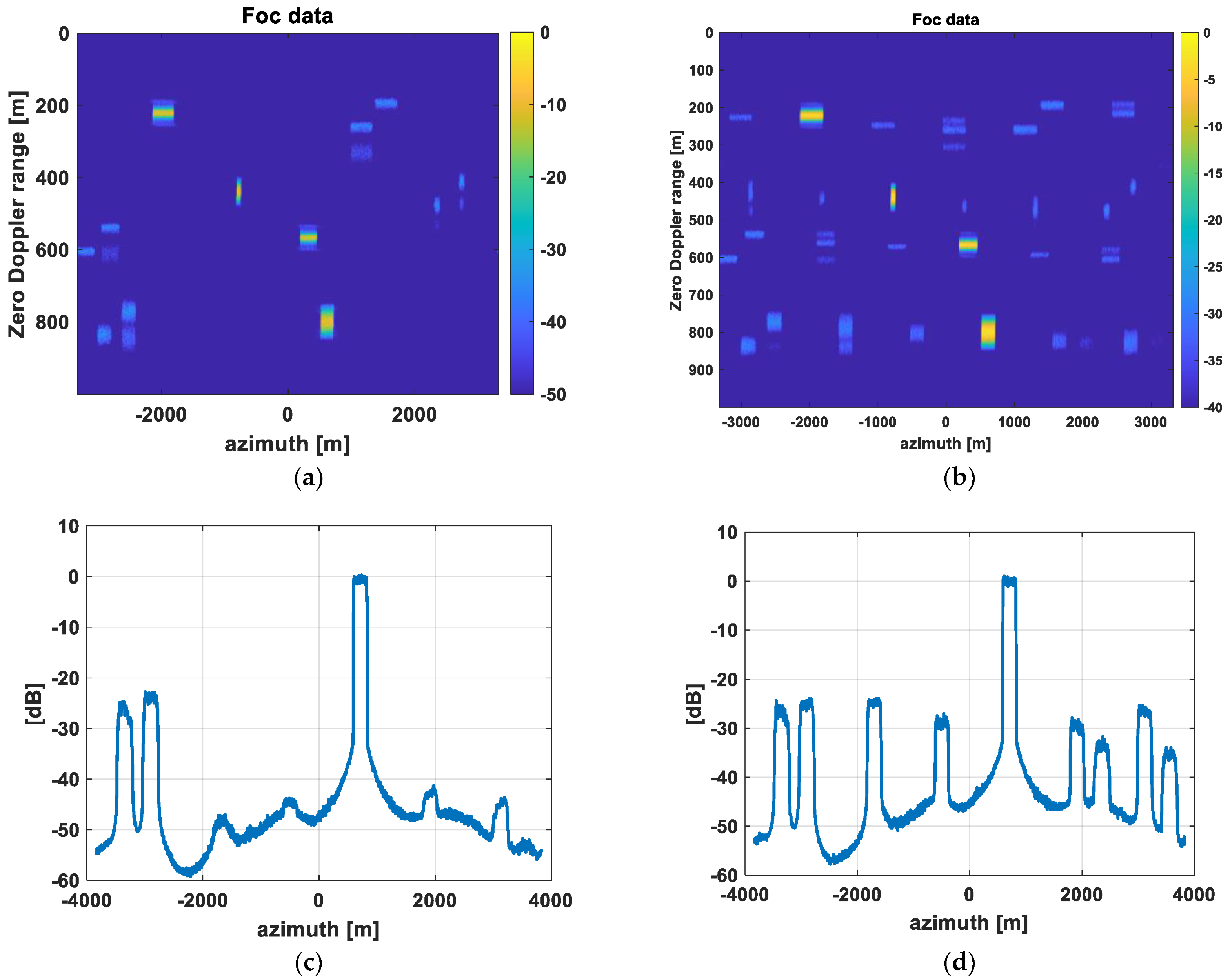
- The data acquired by the n-th sensor are upsampled by first transforming into the Doppler domain and then replicating (mosaicking) N-times to form the complex spectrum shown in Figure 3c.
- Each of the N spectral replicas is weighted by the term (n being the image, and m it the replica) according to (2).
- All N images are summed together, obtaining a single RGC with a broad Doppler spectrum.
- The data are focused, obtaining the final fine-resolution ambiguity-free image.
3. Efficient and Flexible Wavenumber Domain Implementation
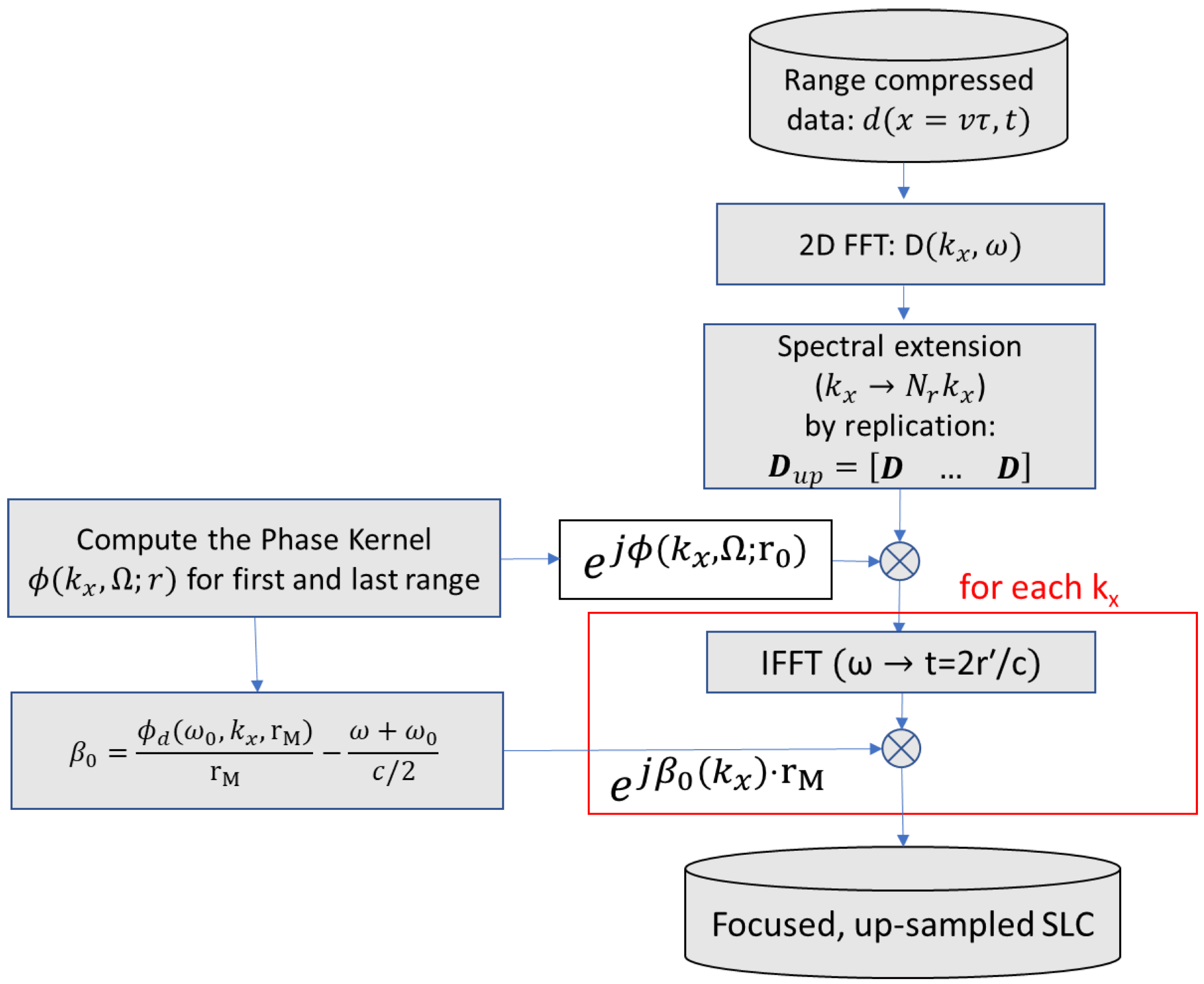
3.1. Implementation of Curved Orbit Focusing and Upsampling
3.2. Phase Preservation
3.3. Multichannel Recombination
4. Results
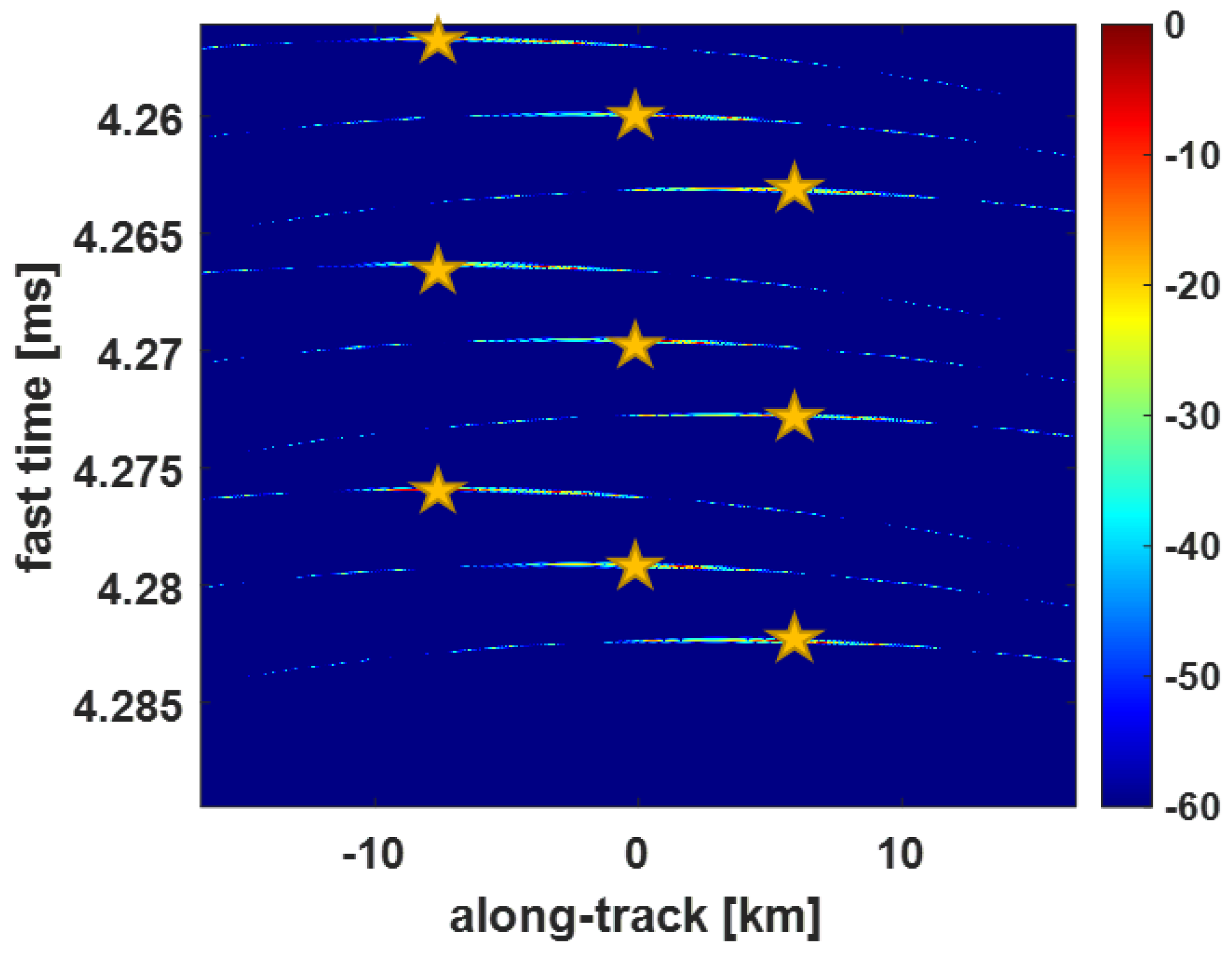
- a set of nine-point targets, spanning an entire processing block of 5 km in slant range and five footprints in azimuth;
- a set of distributed targets spanning a block of 1 km in slant range and three footprints in azimuth.
- the optimal sensor displacements, foreseen by the anti-DPCA condition (1), for which perfect ambiguities-free recombination could be achieved;
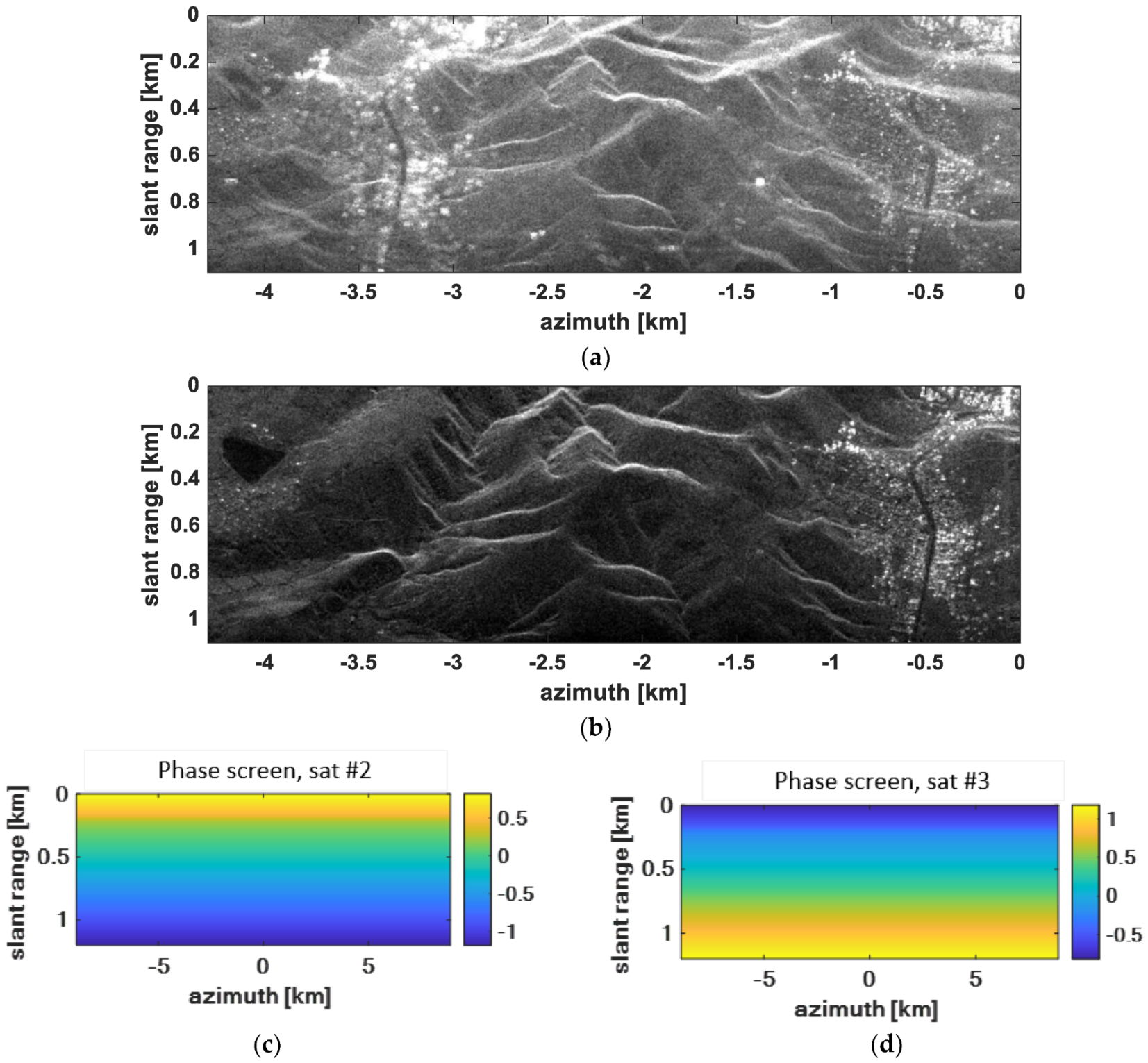
- shifting the second and third sensors, respectively, by 50 cm and −50 cm w.r.t the case above. So doing, the equivalent monostatic phase centers are shifted by ±25 cm, a significant fraction of the fine image resolution La/2 = 1.5 m. This condition stresses the capability of the inversion to remove ambiguities as much as possible.
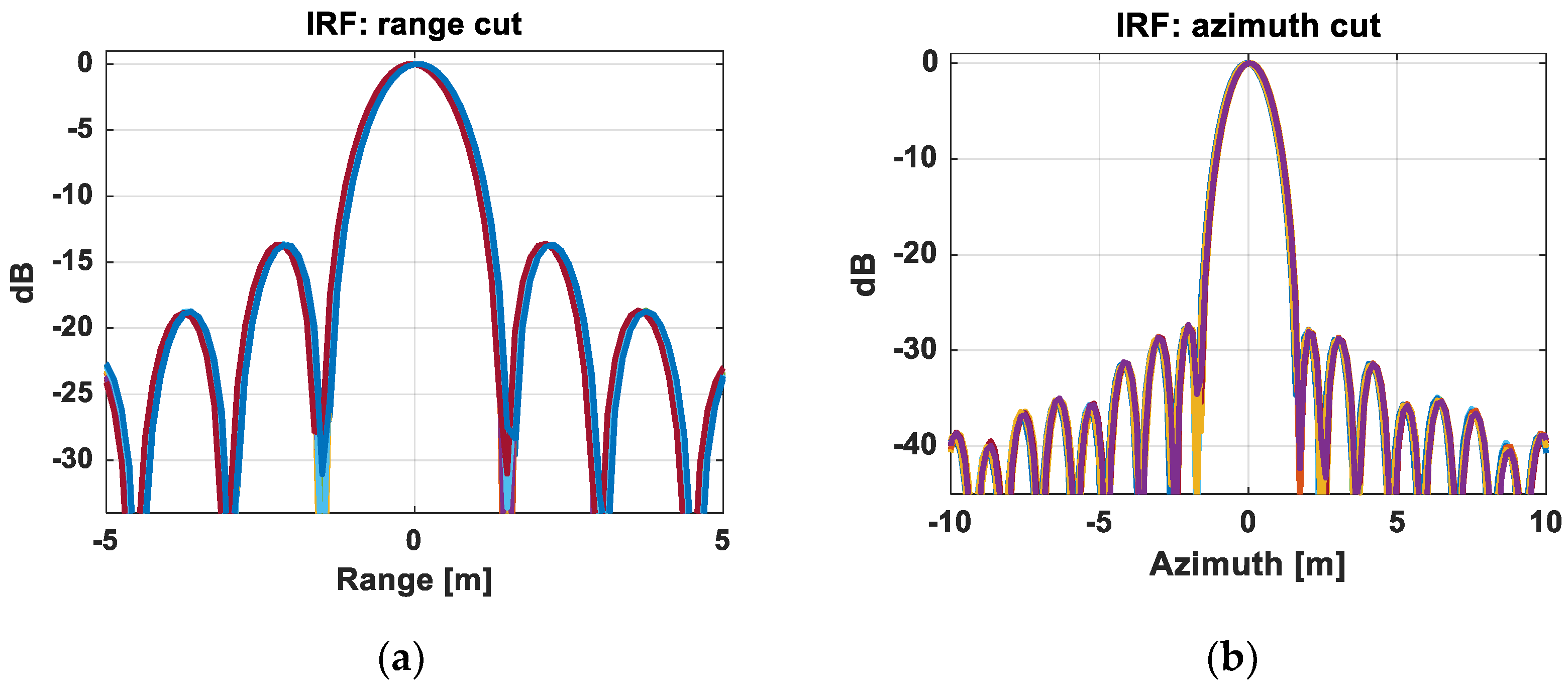
4.1. Point Target Analysis
4.2. Distributed Area Target Analysis
4.3. A Realistic Scenario: The Impact of Across-Track Baselines
4.4. Efficiency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
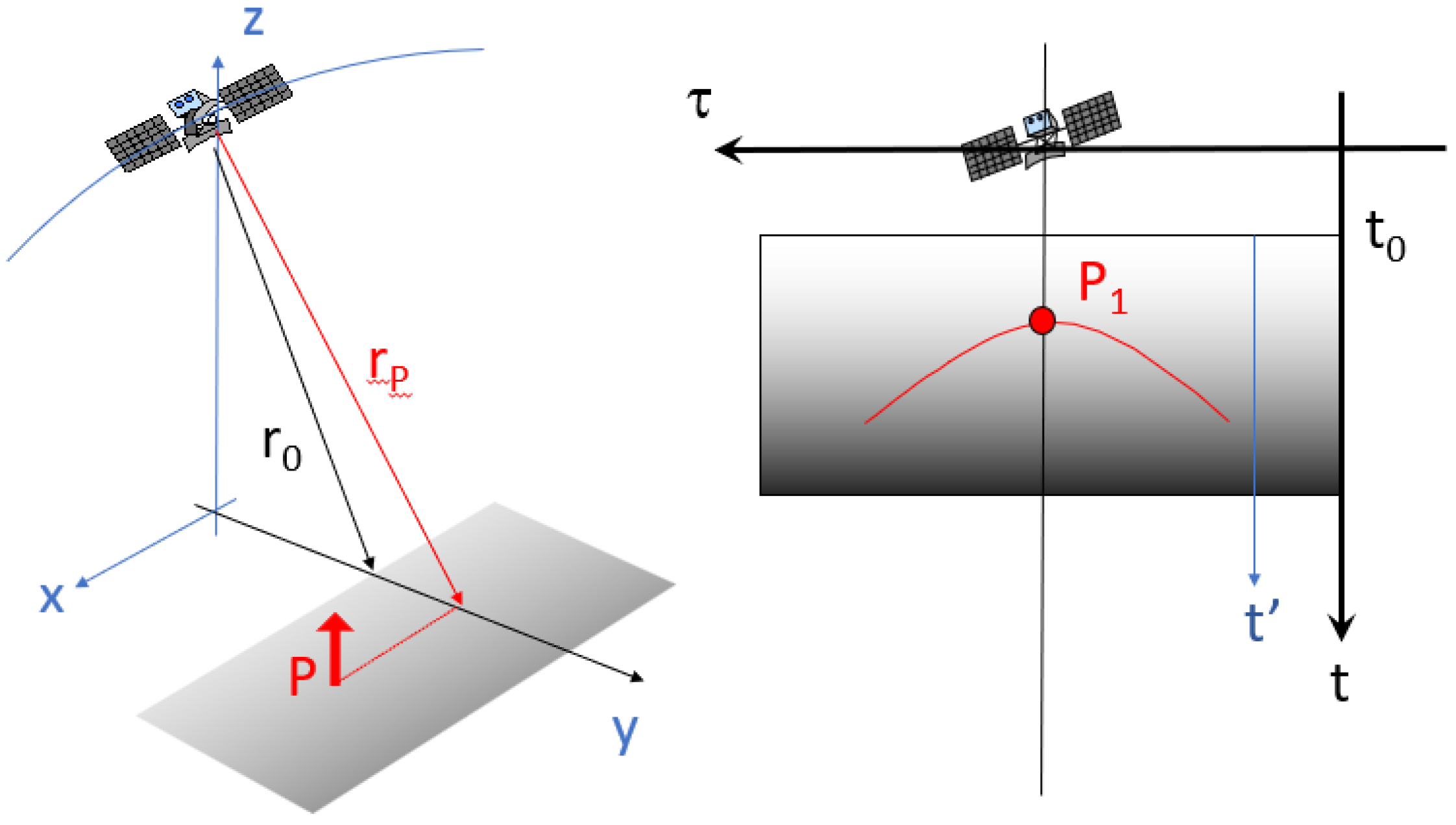
Appendix A. Derivation of Focusing Kernels for Curved Orbit

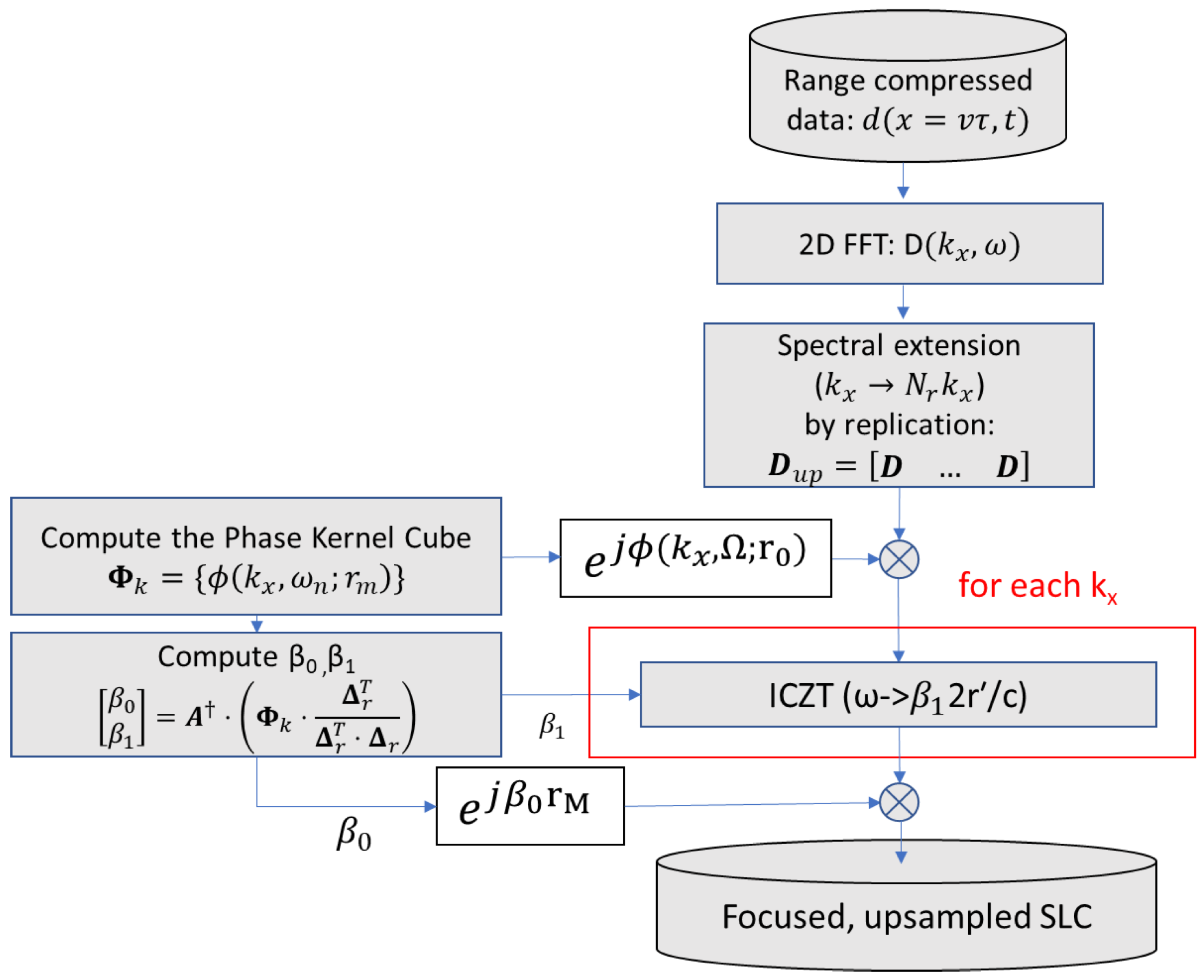
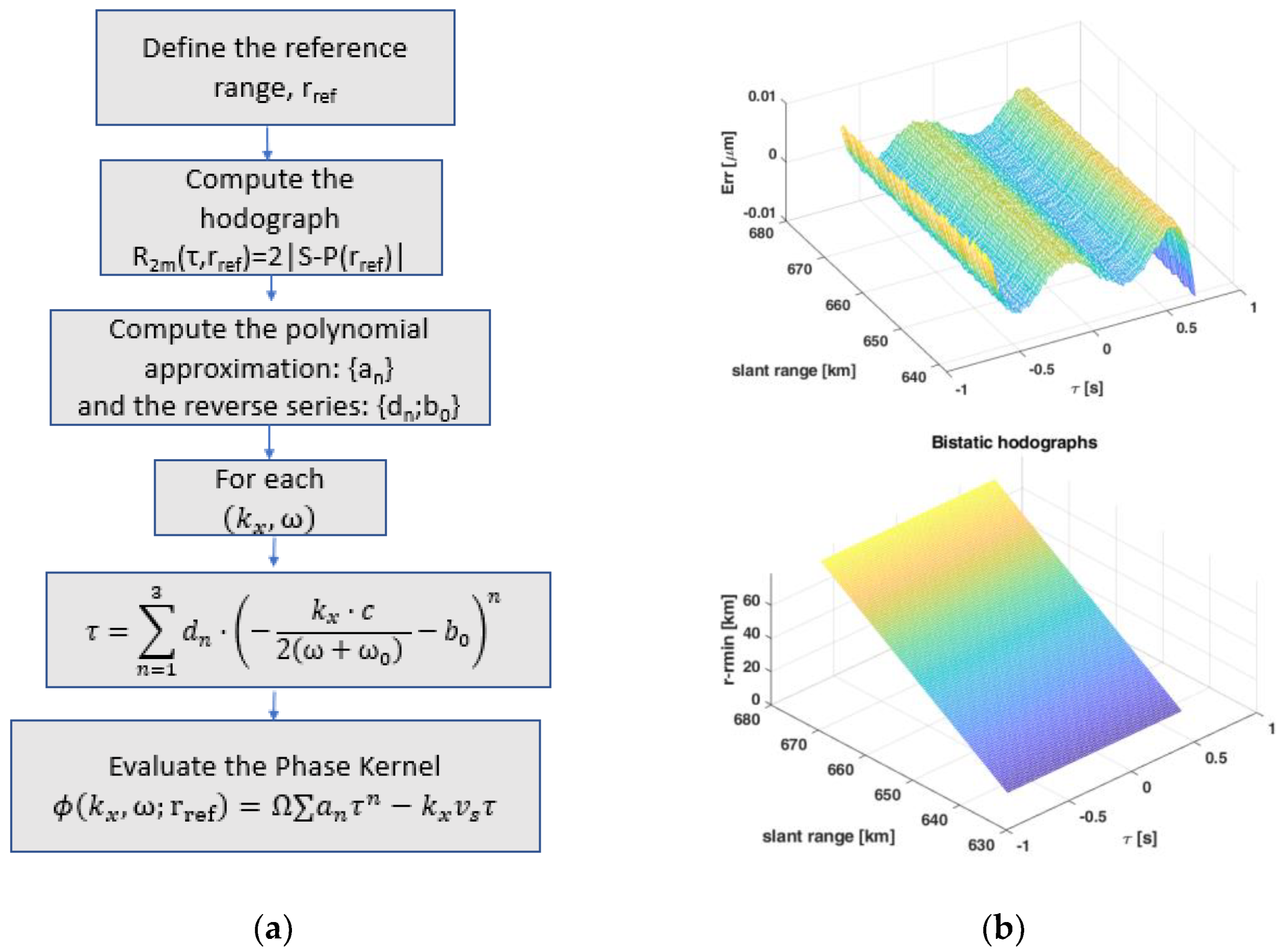
Appendix B. Numerical Implementation of the WD Kernel
- Compute the two-way hodograph that is double the Euclidean distance between the sensor (all along its orbit) and the target at slant range, r, according to (A10). Note that if this distance is smooth, then a few samples need to be evaluated.
- Fit a fourth-order polynomial deriving the coefficients {…} in (A19);
- Derive the polynomial coefficients {…} and then {…} as from (A20) and (A21);
- Evaluate the spectra for each wavenumber pair, (kx,Ω), by computing first ξ from (A16), then from (A19), and finally R from (A18).

References
- Villano, M.; Márquez-Martínez, J.; Moller, D.; Younis, M. Overview of Newspace Synthetic Aperture Radar Instrument Activities. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 4130–4132. [Google Scholar]
- Freeman, A.; Johnson, W.T.K.; Huneycutt, B.; Jordan, R.L.; Hensley, S.; Siqueira, P.; Curlander, J. The “Myth” of the Minimum SAR Antenna Area Constraint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 320–324. [Google Scholar] [CrossRef] [Green Version]
- Aguttes, J.P. The SAR Train Concept: Required Antenna Area Distributed over N Smaller Satellites, Increase of Performance by N. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium. Proceedings (IEEE Cat. No.03CH37477), Toulouse, France, 21–25 July 2003; Volume 1, pp. 542–544. [Google Scholar]
- Gigantino, A.; Graziano, M.D.; Renga, A.; Moccia, A. Simulation of Distributed SAR Images by Multi-Platform Image Syn-Thesis: Application to a CubeSats Formation. In Proceedings of the EUSAR 2022; 14th European Conference on Synthetic Aperture Radar, Leipzig, Germany, 25–27 July 2022; pp. 1–6. [Google Scholar]
- Angelone, C.V.; Mancini, M.L.; Tampellini, L.; Maioli, G.; Montano, D.; Giudici, P.; Guccione, F.; Gerace, P.; Gabellini, S.; Falzini, A.; et al. SATURN—A Synthetic Aperture Radar CubeSats Swarm Mission for Earth Observation. In Proceedings of the 73rd International Astronautical Congress (IAC), Paris, France, 18–22 September 2022; pp. 1–11. [Google Scholar]
- Aguttes, J.P. The SAR Train Concept: An along-Track Formation of Sar Satellites for Diluting the Antenna Area over N Smaller Satellites, While Increasing Performance by N. Acta Astronaut. 2005, 57, 197–204. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I.; Klare, J.; Gierull, C.H. MIMO SAR Processing for Multichannel High-Resolution Wide-Swath Radars. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5034–5055. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR Signal Reconstruction from Nonuniform Displaced Phase Center Sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef] [Green Version]
- Cheng, P.; Wan, J.; Xin, Q.; Wang, Z.; He, M.; Nian, Y. An Improved Azimuth Reconstruction Method for Multichannel SAR Using Vandermonde Matrix. IEEE Geosci. Remote Sens. Lett. 2017, 14, 67–71. [Google Scholar] [CrossRef]
- Giudici, D.; Guarnieri, A.M.; Guccione, P.; Mapelli, D.; Persico, A. Formation of MIMO SAR Mini-Satellites: Performance Prediction. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 1–16 July 2021; pp. 1094–1097. [Google Scholar]
- Gebert, N.; Krieger, G.; Moreira, A. Multichannel Azimuth Processing in ScanSAR and TOPS Mode Operation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2994–3008. [Google Scholar] [CrossRef] [Green Version]
- Guccione, P.; Monti Guarnieri, A.; Rocca, F.; Giudici, D.; Gebert, N. Along-Track Multistatic Synthetic Aperture Radar Formations of Minisatellites. Remote Sens. 2020, 12, 124. [Google Scholar] [CrossRef] [Green Version]
- Cerutti-Maori, D.; Ender, J. Performance Analysis of Multistatic Configurations for Spaceborne GMTI Based on the Auxiliary Beam Approach. IEE Proc.-Radar Sonar Navig. 2006, 153, 96–103. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A. Multistatic Sar Satellite Formations: Potentials and Challenges. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, 2005. IGARSS ’05, Seoul, Republic of Korea, 29 July 2005; Volume 4, pp. 2680–2684. [Google Scholar]
- Giudici, D.; Guccione, P.; Mapelli, D.; Marini, J.; Guarnieri, A.M. RAINBOW-SAR: Enhanced Observation Capability by Multiple Frequency Radar. In Proceedings of the 7th Workshop on RF and Microwave Systems, 10 May 2022. Instruments & Sub-systems + 5th Ka-band Workshop. [Google Scholar]
- Cafforio, C.; Prati, C.; Rocca, F. SAR Data Focusing Using Seismic Migration Techniques. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 194–207. [Google Scholar] [CrossRef]
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar; Wiley: New York, NY, USA, 1991; Volume 11. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data. Artech House 2005, 1, 108–110. [Google Scholar]
- D'Aria, D.; Guarnieri, A.M. High-Resolution Spaceborne SAR Focusing by SVD-Stolt. IEEE Geosci. Remote Sens. Lett. 2007, 4, 639–643. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Rodriguez-Cassola, M.; Zan, F.D.; Lopez-Dekker, P.; Scheiber, R.; Reigber, A. Efficient Fourier-Based Evaluation of SAR Focusing Kernels. In Proceedings of the EUSAR 2014; 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Belotti, M.; D’Aria, D.; Guccione, P.; Miranda, N.; Monti Guarnieri, A.; Rosich, B. Requirements and Tests for Phase Preservation in a SAR Processor. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2788–2798. [Google Scholar] [CrossRef]
- Bamler, R.; Schaettler, B. Phase-Preservation in SAR Processing: Definition, Requirements and Tests. DLR Tech. Note Ver. 1995, 1. [Google Scholar]
- Gebert, N.; Krieger, G.; Moreira, A. Digital Beamforming on Receive: Techniques and Optimization Strategies for High-Resolution Wide-Swath SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef] [Green Version]
- Giudici, D.; Guccione, P.; Manzoni, M.; Guarnieri, A.M.; Rocca, F. Compact and Free-Floating Satellite MIMO SAR Formations. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Bamler, R.; Meyer, F.; Liebhart, W. Processing of Bistatic SAR Data From Quasi-Stationary Configurations. Geosci. Remote Sens. IEEE Trans. On 2007, 45, 3350–3358. [Google Scholar] [CrossRef]
- Moreira, A.; Mittermayer, J.; Scheiber, R. Extended Chirp Scaling Algorithm for Air- and Spaceborne SAR Data Processing in Stripmap and ScanSAR Imaging Modes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1123–1136. [Google Scholar] [CrossRef]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing Bistatic SAR Data Using the Nonlinear Chirp Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef] [Green Version]
- An, D.; Huang, X.; Jin, T.; Zhou, Z. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A Two-Dimensional Spectrum for Bistatic SAR Processing Using Series Reversion. GRSL 2007, 4, 93–97. [Google Scholar] [CrossRef] [Green Version]
- Rabiner, L.R.; Gold, B. Theory and Application of Digital Signal Processing; Englewood Cliffs Prentice-Hall: Hoboken, NJ, USA, 1975. [Google Scholar]
- Wiehle, S.; Mandapati, S.; Günzel, D.; Breit, H.; Balss, U. Synthetic Aperture Radar Image Formation and Processing on an MPSoC. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Bamler, R. A Comparison of Range-Doppler and Wave-Number Domain SAR Focusing Algorithms. TGARS 1992, 30, 706–713. [Google Scholar]
- Prats-Iraola, P.; Rodriguez-Cassola, M.; De Zan, F.; López-Dekker, P.; Scheiber, R.; Reigber, A. Efficient Evaluation of Fourier-Based SAR Focusing Kernels. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1489–1493. [Google Scholar] [CrossRef] [Green Version]
- Sentinel, G. Team, GMES Sentinel-1 System Requirements Document; Technical Report S1-RS-ESA-SY-0001; ESA: Paris, France, 2006. [Google Scholar]
- Graziano, M.D.; Renga, A.; Grasso, M.; Moccia, A. PRF Selection in Formation-Flying SAR: Experimental Verification on Sentinel-1 Monostatic Repeat-Pass Data. Remote Sens. 2019, 12, 29. [Google Scholar] [CrossRef] [Green Version]
- Graziano, M.D.; Renga, A.; Grasso, M.; Moccia, A. Error Sources and Sensitivity Analysis in Formation Flying Synthetic Aperture Radar. Acta Astronaut. 2022, 192, 97–112. [Google Scholar] [CrossRef]
- Kraus, T.; Krieger, G.; Bachmann, M.; Moreira, A. Spaceborne Demonstration of Distributed SAR Imaging With TerraSAR-X and TanDEM-X. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1731–1735. [Google Scholar] [CrossRef] [Green Version]
- Kraus, T.; Krieger, G.; Bachmann, M.; Moreira, A. Addressing the Terrain Topography in Distributed SAR Imaging. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–5. [Google Scholar]
- Dogan, O.; Uysal, F.; Dekker, P.L. Unambiguous Recovery of Multistatic SAR Data for Nonzero Cross Track Baseline Case. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Lin, H.; Deng, Y.; Zhang, H.; Liang, D.; Jia, X. An Imaging Method for Spaceborne Cooperative Multistatic SAR Formations With Nonzero Cross-Track Baselines. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8541–8551. [Google Scholar] [CrossRef]
- Wermuth, M.; Hauschild, A.; Montenbruck, O.; Jäggi, A. TerraSAR-X Rapid and Precise Orbit Determination. In Proceedings of the 21st International Symposium on Space Flight Dynamics, Toulouse, France, 28 September–2 October 2009. [Google Scholar]
- Bamler, R.; Hartl, P. Synthetic Aperture Radar Interferometry. Inverse Probl. 1998, 14, 4. [Google Scholar] [CrossRef]
- Ferretti, A.; Monti Guarnieri, A.; Prati, C.; Rocca, F.; Massonnet, D. InSAR Principles: Guidelines for SAR Interferometry Processing and Interpretation; ESA TM-19 Feb 2007; ESA: Paris, France, 2007. [Google Scholar]
- Manzoni, M.; Monti-Guarnieri, A.V.; Realini, E.; Venuti, G. Joint Exploitation of SAR and GNSS for Atmospheric Phase Screens Retrieval Aimed at Numerical Weather Prediction Model Ingestion. Remote Sens. 2020, 12, 654. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Xu, Q.; Meng, F.; Zhang, S. Distributed Real-Time Image Processing of Formation Flying SAR Based on Embedded GPUs. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6495–6505. [Google Scholar] [CrossRef]
- Lanari, R. A New Method for the Compensation of the SAR Range Cell Migration Based on the Chirp Z-Transform. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1296–1299. [Google Scholar] [CrossRef]
- Ran, J.; Li, X. An Analytical Imaging Algorithm for Parallel Invariant SAR. In Proceedings of the 2018 IEEE 3rd International Conference on Signal and Image Processing (ICSIP), Shenzhen, China, 13–15 July 2018; pp. 97–100. [Google Scholar]
- Di Martino, G.; Iodice, A.; Natale, A.; Riccio, D. Time-Domain and Monostatic-like Frequency-Domain Methods for Bistatic SAR Simulation. Sensors 2021, 21, 5012. [Google Scholar] [CrossRef] [PubMed]
- MathWorld, W. MS Windows NT Kernel Description. Available online: https://mathworld.wolfram.com/SeriesReversion.html (accessed on 1 January 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Parameter | Symbol | Value |
|---|---|---|---|---|
| Central angular frequency | ω0 | Wavelength | ||
| Azimuth | x | Carrier frequency | Hz | |
| Slow time | τ | Bandwidth | 100 MHz | |
| Fast time | t | Antenna length | 3 m | |
| Squint angle | ψ | Mean slant range | 640 km | |
| Speed of light | Incidence angle | 30° | ||
| Baseband range wavenumber | Velocity | m/s | ||
| Azimuth wavenumber | Swath depth (ground range) | 30 km | ||
| Sampling angular frequency | Pulse Repetition Frequency | kHz | ||
| Azimuth Resolution | 1.5 m | |||
| Ground Range Resolution | 3 m | |||
| Synthetic aperture | 6.6 km |
| Semi-Major Axis | Eccentricity | Inclination | RAAN | Arg of Periapsis |
|---|---|---|---|---|
| 6892.2 km | 8.2 × 10−3 | 97.5° | 112.3° | 307.16° |
| Upsampling, Focusing and Multichannel Combination | Multichannel Combination with Upsampling and Focusing | |||
|---|---|---|---|---|
| NM | NCZT | NM | NCZT | |
| Data Focusing | 5.1 (×3) | 22(×3) | 12 | 29 |
| Multichannel recombination | 1.1 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petrushevsky, N.; Monti Guarnieri, A.; Manzoni, M.; Prati, C.; Tebaldini, S. An Operational Processing Framework for Spaceborne SAR Formations. Remote Sens. 2023, 15, 1644. https://doi.org/10.3390/rs15061644
Petrushevsky N, Monti Guarnieri A, Manzoni M, Prati C, Tebaldini S. An Operational Processing Framework for Spaceborne SAR Formations. Remote Sensing. 2023; 15(6):1644. https://doi.org/10.3390/rs15061644
Chicago/Turabian StylePetrushevsky, Naomi, Andrea Monti Guarnieri, Marco Manzoni, Claudio Prati, and Stefano Tebaldini. 2023. "An Operational Processing Framework for Spaceborne SAR Formations" Remote Sensing 15, no. 6: 1644. https://doi.org/10.3390/rs15061644