

High-Accuracy Spectral Measurement of Stimulated-Brillouin-Scattering Lidar Based on Hessian Matrix and Steger Algorithm

Abstract
:1. Introduction
2. Method
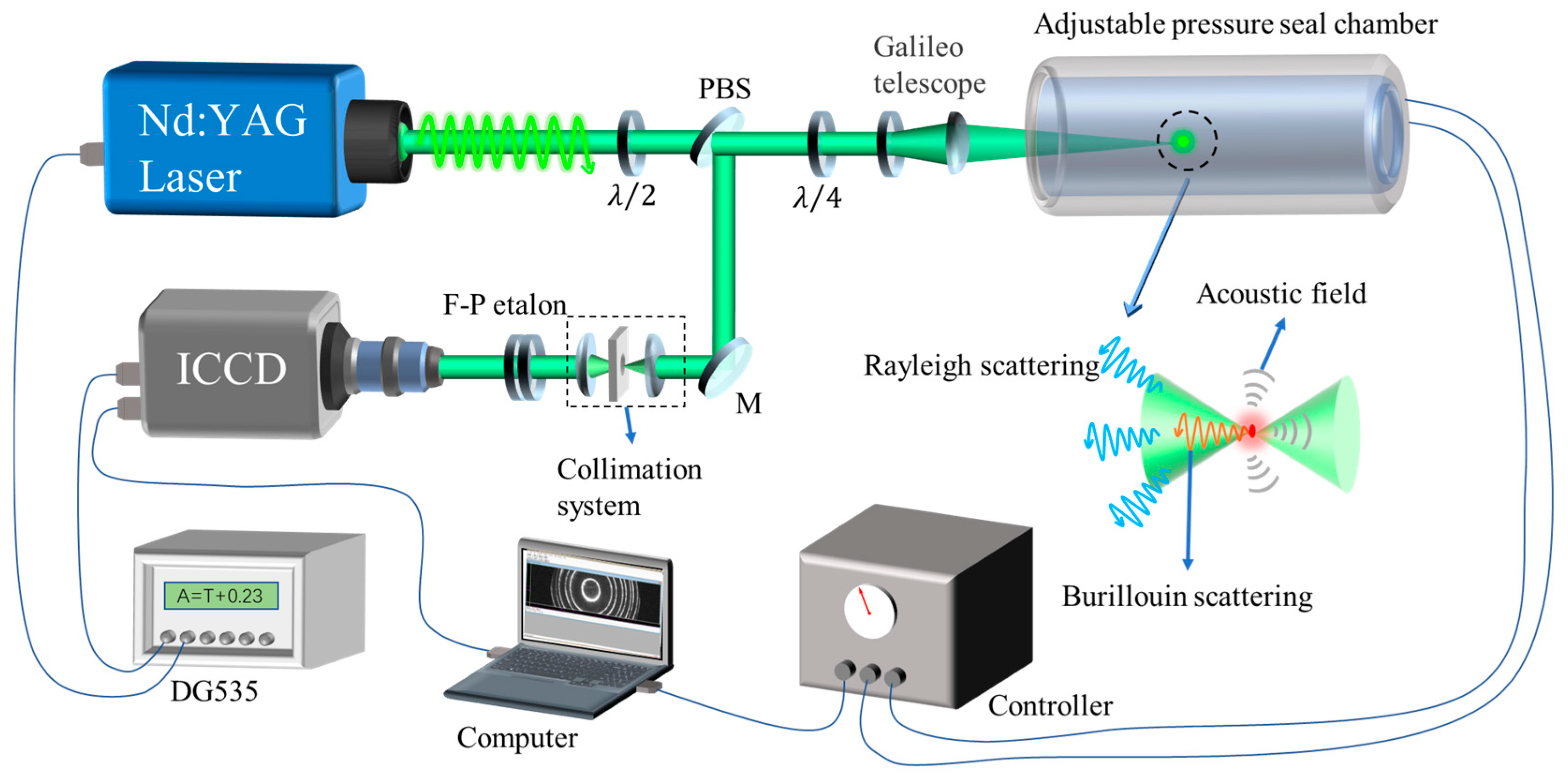
2.1. SBS Lidar System
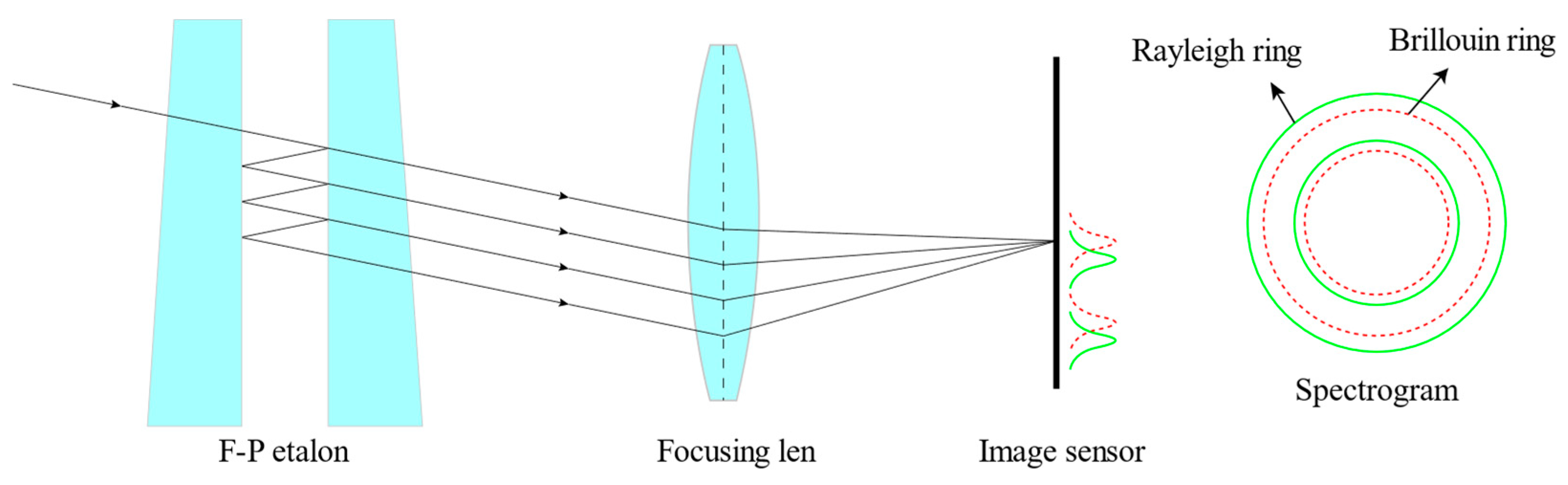
2.2. Brillouin Spectra Obtained from Interferometer System
2.3. Proposed Method
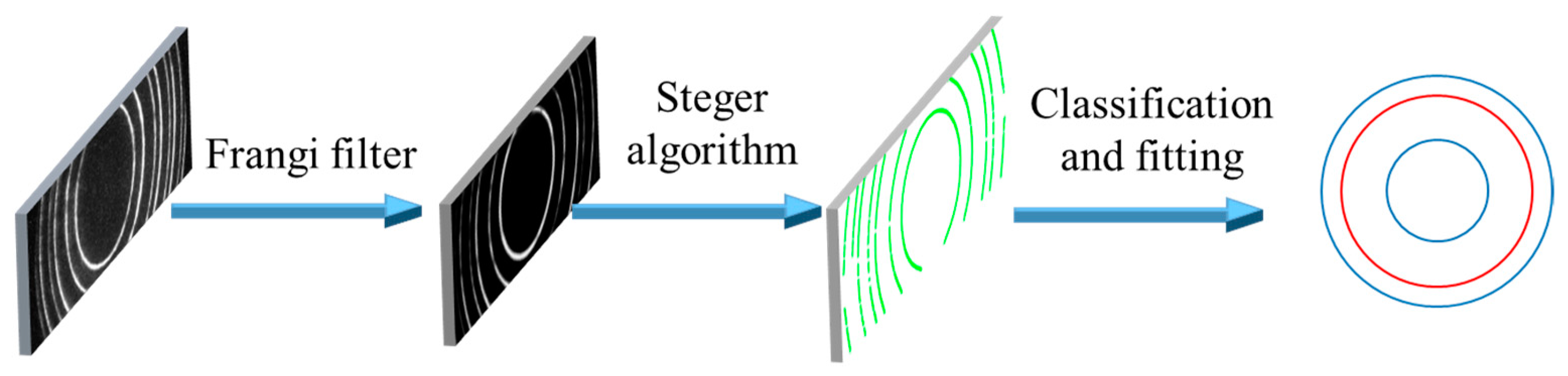
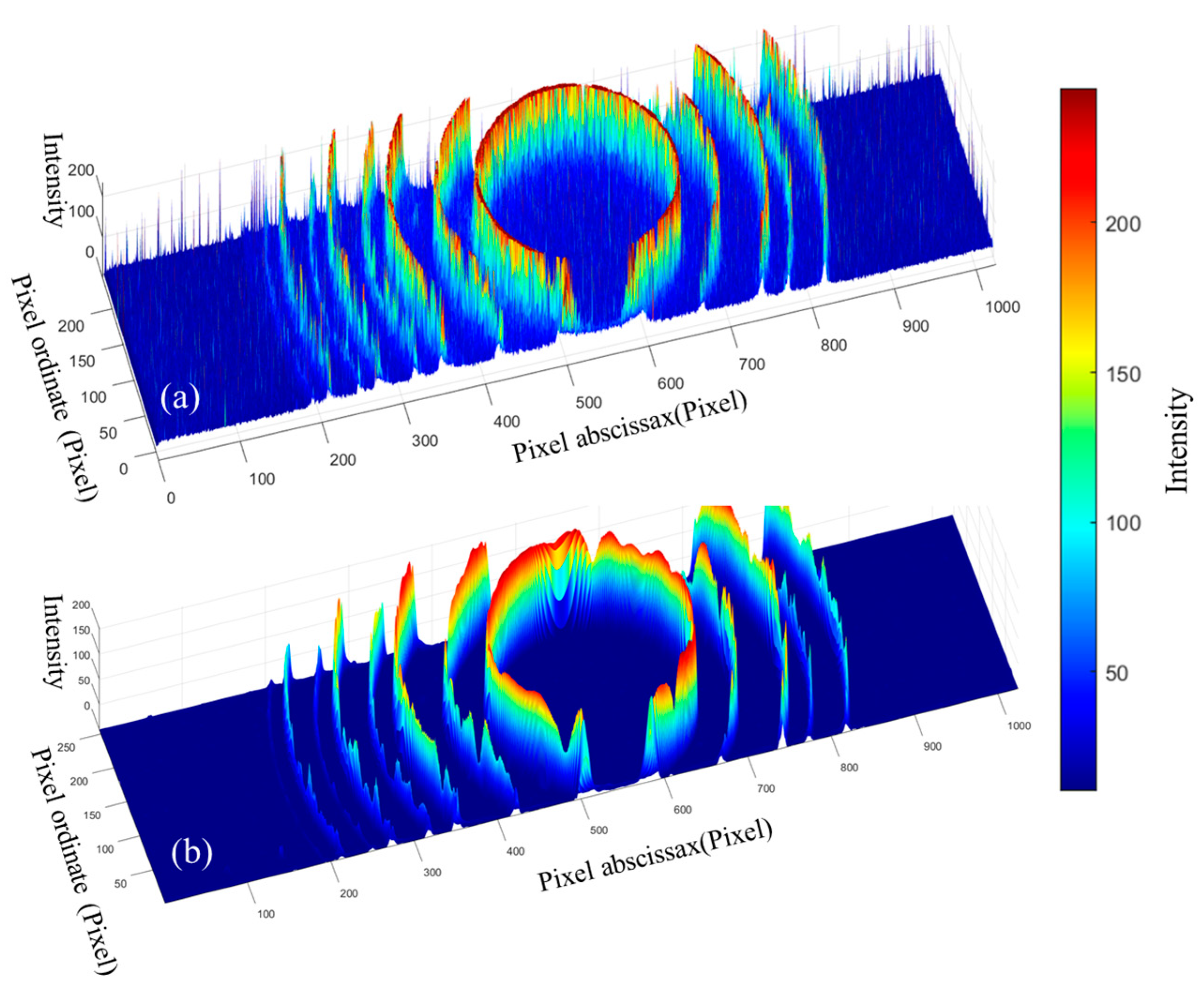
2.3.1. Spectral Noise Removal Algorithm
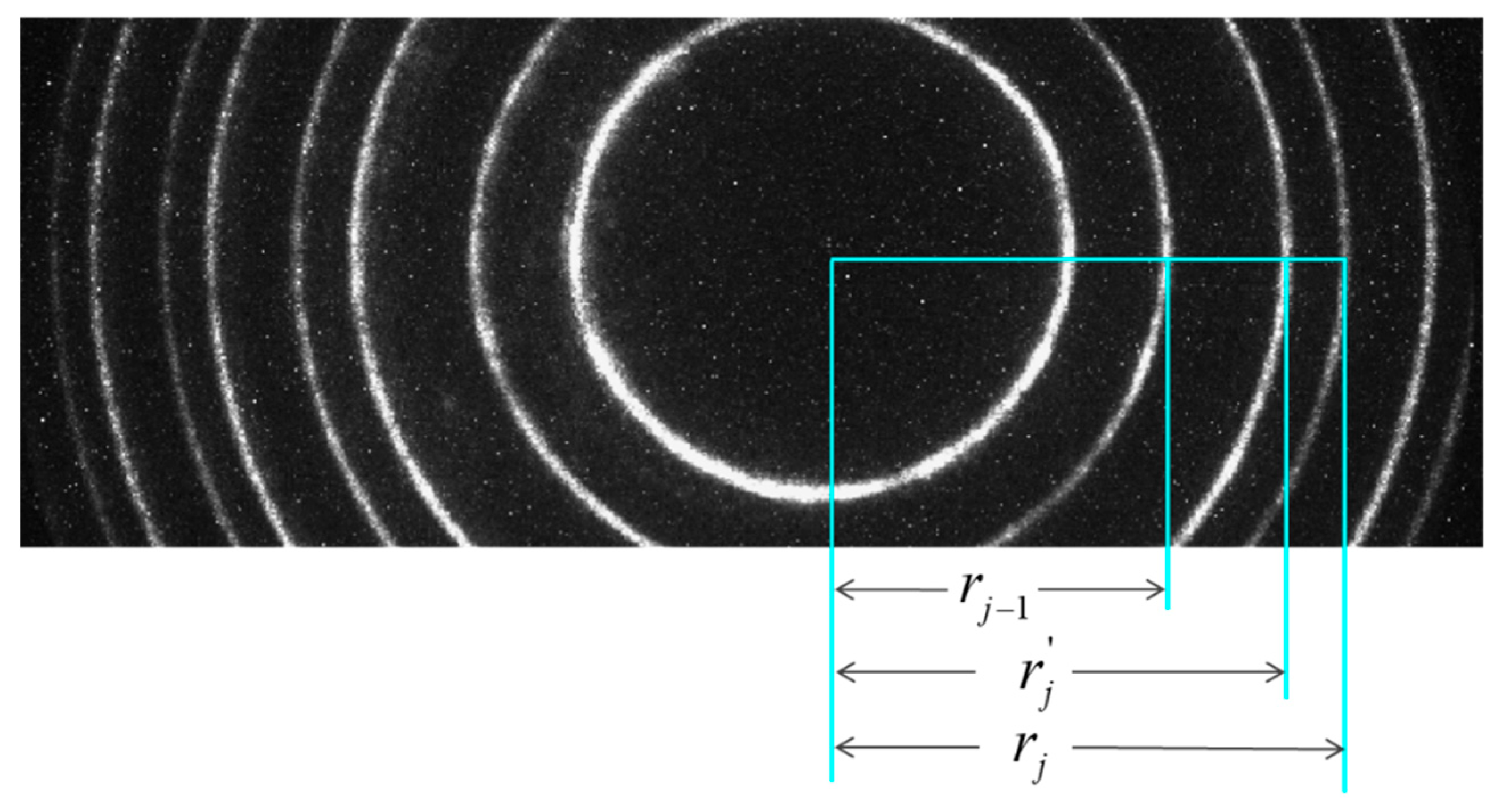
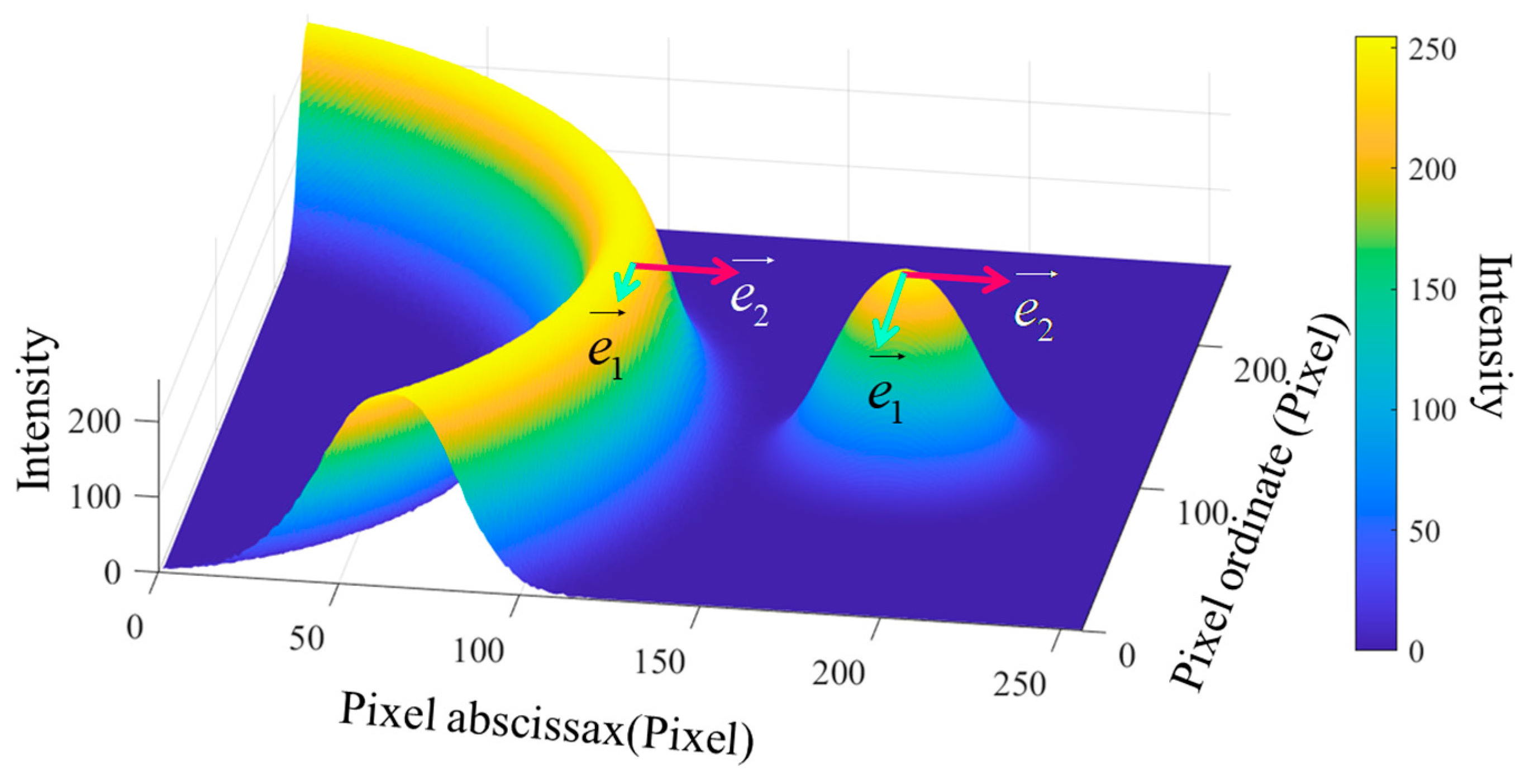
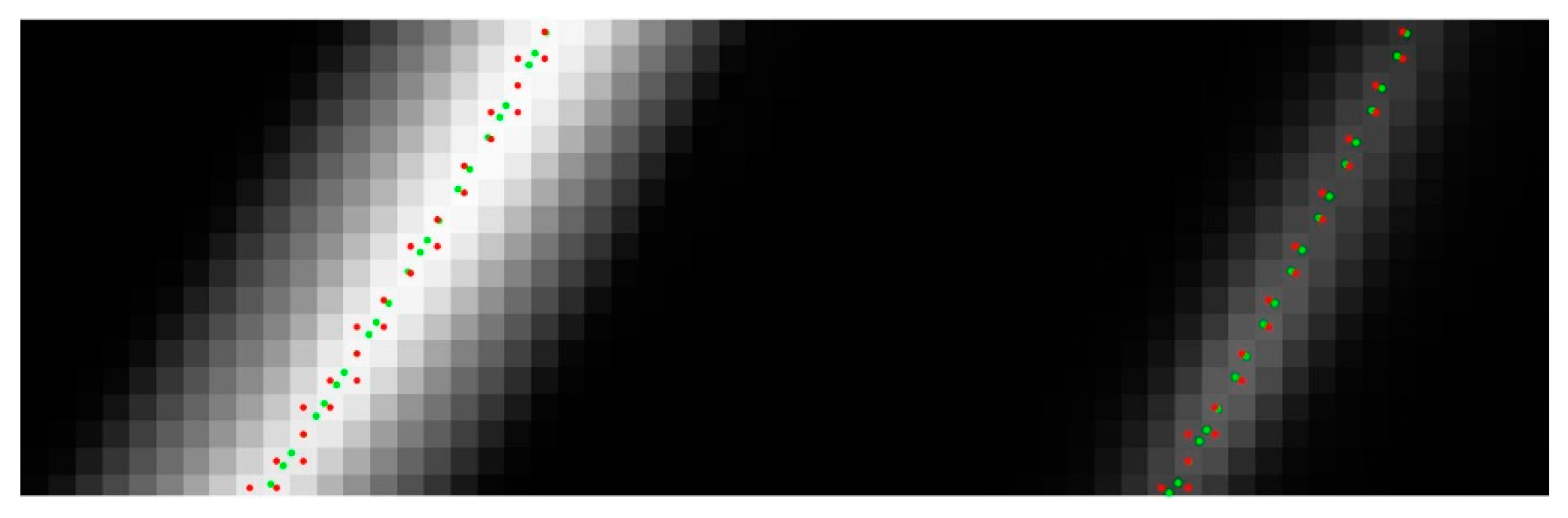
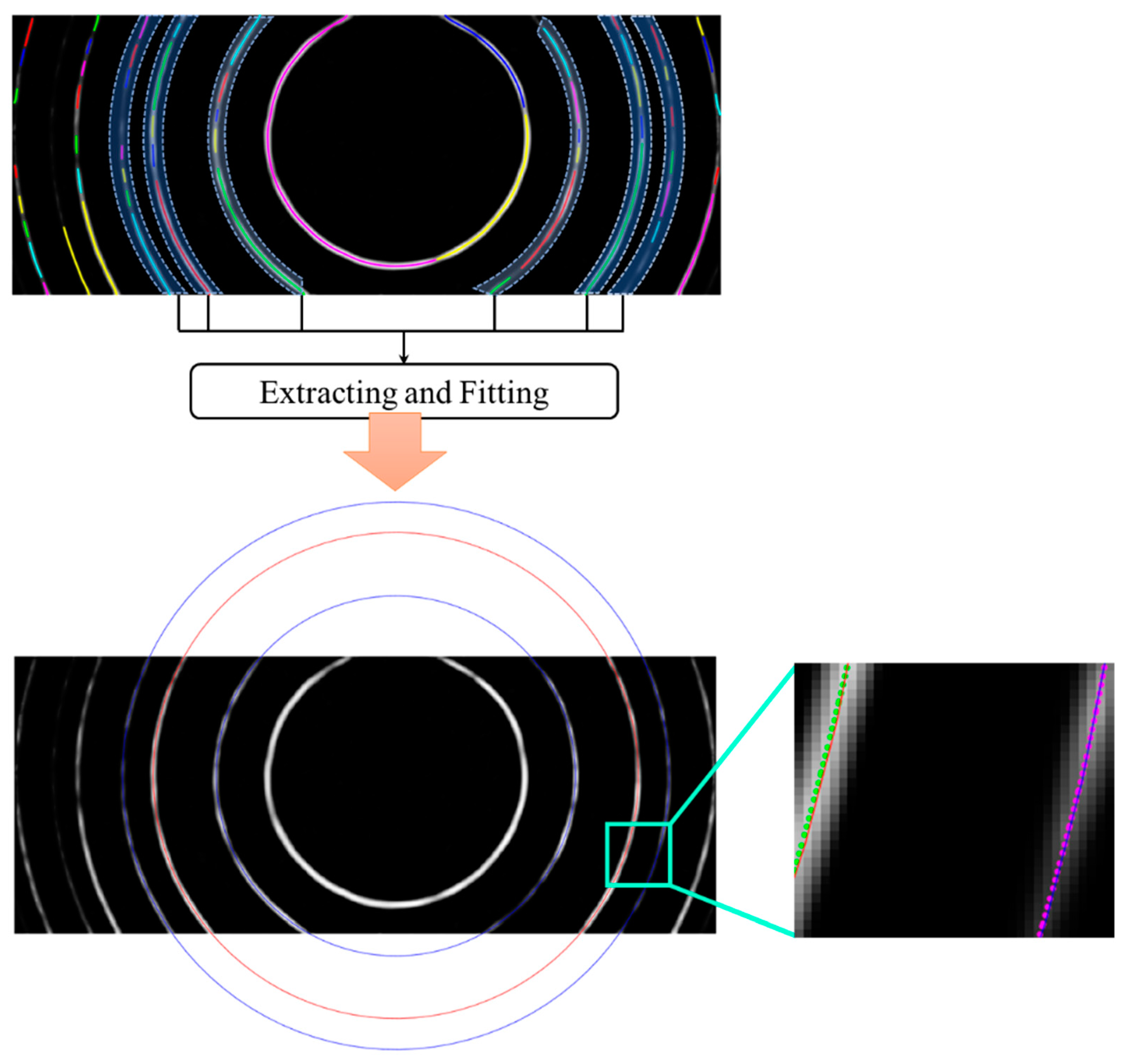
2.3.2. Extraction of the Centerline of Interference Rings
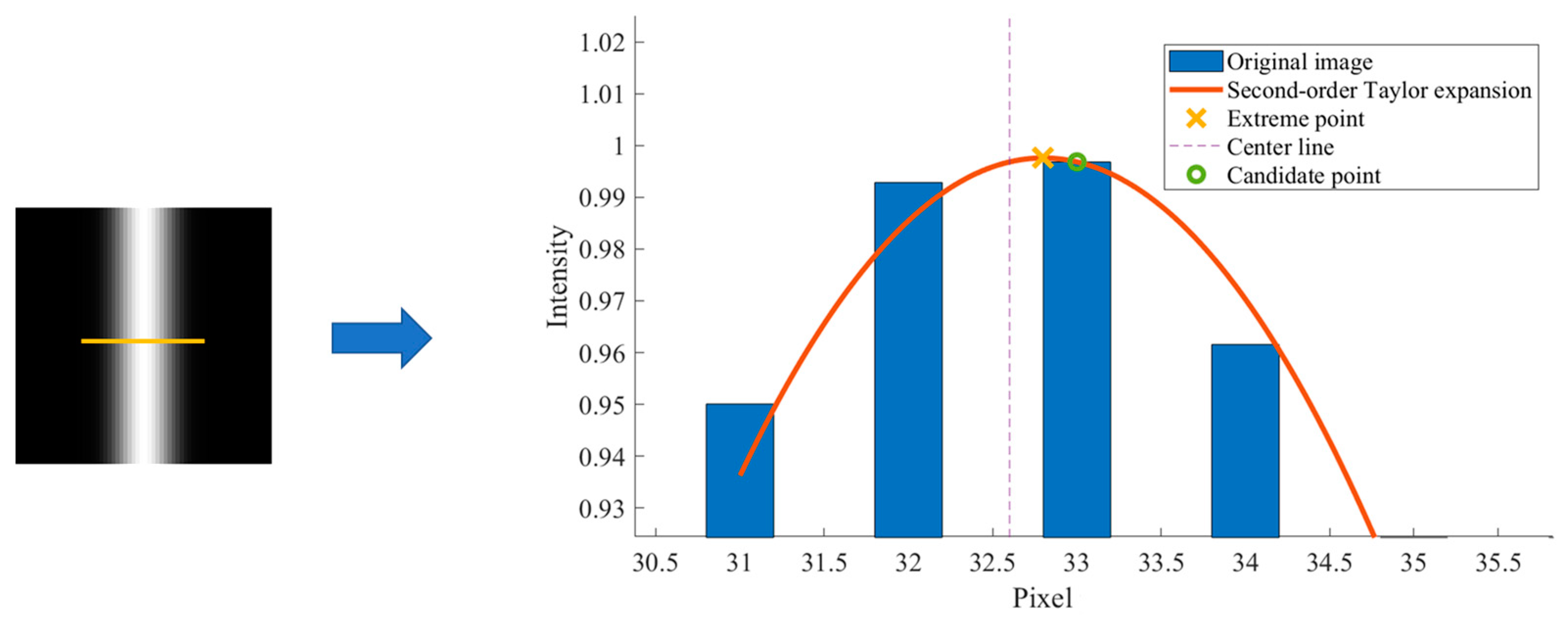
2.3.3. Curve Fitting
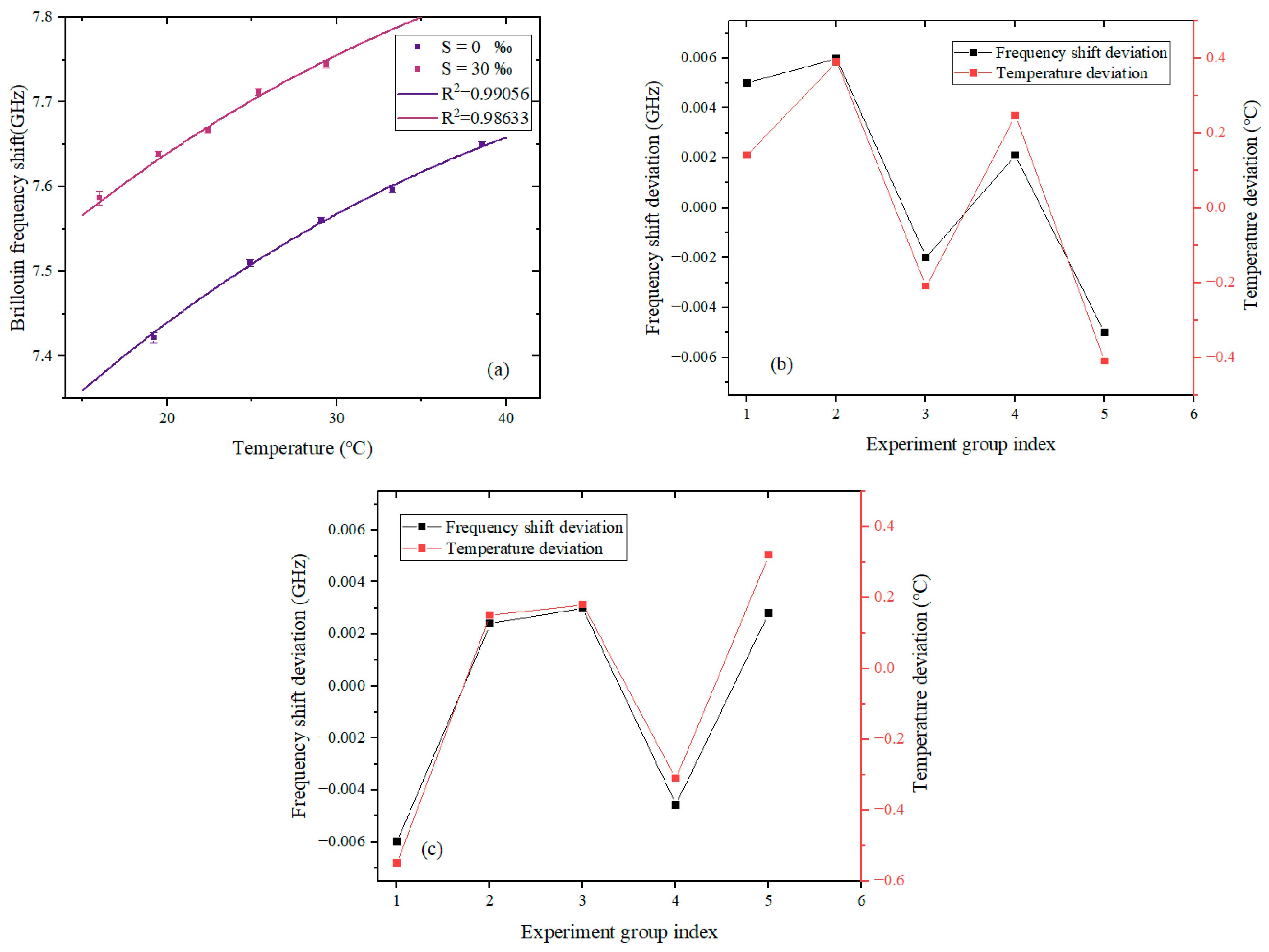
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shibata, A. Effect of air-sea temperature difference on ocean microwave brightness temperature estimated from AMSR, SeaWinds, and buoys. J. Oceanogr. 2007, 63, 863–872. [Google Scholar] [CrossRef]
- Crescentini, M.; Bennati, M.; Tartagni, M. Design of integrated and autonomous conductivity-temperature-depth (CTD) sensors. Aeu-Int. J. Electron. Commun. 2012, 66, 630–635. [Google Scholar] [CrossRef]
- Reul, N.; Fournier, S.; Boutin, J.; Hernandez, O.; Maes, C.; Chapron, B.; Alory, G.; Quilfen, Y.; Tenerelli, J.; Morisset, S.; et al. Sea Surface Salinity Observations from Space with the SMOS Satellite: A New Means to Monitor the Marine Branch of the Water Cycle. Surv. Geophys. 2014, 35, 681–722. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Huang, L.J.; Li, W.; Yang, X.; Yan, X.H. Retrieving Ocean Subsurface Temperature Using a Satellite-Based Geographically Weighted Regression Model. J. Geophys. Res.-Ocean. 2018, 123, 5180–5193. [Google Scholar] [CrossRef]
- Collins, D.; Bell, J.; Zanoni, R.; McDermid, I.S.; Breckinridge, J.; Sepulveda, C. Recent Progress in the Measurement of Temperature and Salinity by Optical Scattering; SPIE: Bellingham, WA, USA, 1984; Volume 0489. [Google Scholar] [CrossRef]
- Xu, N.; Liu, Z.; Zhang, X.; Xu, Y.; Luo, N.; Li, S.; Xu, J.; He, X.; Shi, J. Influence of temperature-salinity-depth structure of the upper-ocean on the frequency shift of Brillouin LiDAR. Opt. Express 2021, 29, 36442–36452. [Google Scholar] [CrossRef]
- Shi, J.; Xu, N.; Luo, N.; Li, S.; Xu, J.; He, X. Retrieval of sound-velocity profile in ocean by employing Brillouin scattering LiDAR. Opt. Express 2022, 30, 16419–16431. [Google Scholar] [CrossRef]
- Shi, J.; Ouyang, M.; Gong, W.; Li, S.; Liu, D. A Brillouin lidar system using F–P etalon and ICCD for remote sensing of the ocean. Appl. Phys. B 2008, 90, 569–571. [Google Scholar] [CrossRef]
- Shi, J.; Xu, J.; Guo, Y.; Luo, N.; Li, S.; He, X. Dependence of Stimulated Brillouin Scattering in Water on Temperature, Pressure, and Attenuation Coefficient. Phys. Rev. Appl. 2021, 15, 054024. [Google Scholar] [CrossRef]
- Shi, J.; Yuan, D.; Xu, J.; Guo, Y.; Luo, N.; Li, S.; He, X. Effects of temperature and pressure on the threshold value of SBS LIDAR in seawater. Opt. Express 2020, 28, 39038–39047. [Google Scholar] [CrossRef]
- Yuan, D.; Xu, J.; Liu, Z.; Hao, S.; Shi, J.; Luo, N.; Li, S.; Liu, J.; Wan, S.; He, X. High resolution stimulated Brillouin scattering lidar using Galilean focusing system for detecting submerged objects. Opt. Commun. 2018, 427, 27–32. [Google Scholar] [CrossRef]
- Liang, K.; Ma, Y.; Huang, J.; Li, H.; Yu, Y. Precise measurement of Brillouin scattering spectrum in the ocean using F–P etalon and ICCD. Appl. Phys. B 2011, 105, 421. [Google Scholar] [CrossRef]
- Hays, P.B. Circle to line interferometer optical system. Appl. Opt. 1990, 29, 1482–1489. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, D.; Yang, Z.; Shi, J.W.; Liu, D.H.; Gong, W.P.; Fry, E.S. Experimental investigation on line width compression of stimulated Brillouin scattering in water. Appl. Phys. Lett. 2011, 98, 221106. [Google Scholar] [CrossRef]
- Huang, J.; Ma, Y.; Zhou, B.; Li, H.; Yu, Y.; Liang, K. Processing method of spectral measurement using F-P etalon and ICCD. Opt. Express 2012, 20, 18568–18578. [Google Scholar] [CrossRef]
- Bo, Z.; Qiming, F.; Yong, M.; Yuan, Y.; Hao, L.; Jun, H.; Kun, L. Experimental analysis on the rapid measurement of a high precision Brillouin scattering spectrum in water using a Fabry–Pérot etalon. Laser Phys. Lett. 2016, 13, 055701. Available online: https://iopscience.iop.org/article/10.1088/1612-2011/13/5/055701 (accessed on 24 March 2016).
- Kun, L.; Qunjie, N.; Xiangkui, W.; Jiaqi, X.; Li, P.; Bo, Z. The effect of signal to noise ratio on accuracy of temperature measurements for Brillouin lidar in water. Laser Phys. 2017, 27, 096003. [Google Scholar] [CrossRef]
- Fry, E.S.; Emery, Y.; Quan, X.; Katz, J.W. Accuracy limitations on Brillouin lidar measurements of temperature and sound speed in the ocean. Appl. Opt. 1997, 36, 6887–6894. [Google Scholar] [CrossRef]
- Yao, Z.J.; Yi, W.D. Curvature aided Hough transform for circle detection. Expert Syst. Appl. 2016, 51, 26–33. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- De Marco, T.; Cazzato, D.; Leo, M.; Distante, C. Randomized circle detection with isophotes curvature analysis. Pattern Recognit. 2015, 48, 411–421. [Google Scholar] [CrossRef]
- Davies, E.R. A modified Hough scheme for general circle location. Pattern Recognit. Lett. 1988, 7, 37–43. [Google Scholar] [CrossRef]
- Frangi, A.F.; Niessen, W.J.; Vincken, K.L.; Viergever, M.A. Multiscale vessel enhancement filtering. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI’98, Cambridge, MA, USA, 11–13 October 1998; pp. 130–137. [Google Scholar] [CrossRef] [Green Version]
- Steger, C. An unbiased detector of curvilinear structures. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Locarnini, R.; Mishonov, A.; Baranova, O.; Boyer, T.; Zweng, M.; Garcia, H.; Reagan, J.; Seidov, D.; Weathers, K.; Paver, C.; et al. World Ocean Atlas 2018, Volume 1: Temperature; US Department of Commerce, National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2019.
- Zweng, M.M.; Reagan, J.; Seidov, D.; Boyer, T.; Locarnini, R.; Garcia, H.; Mishonov, A.; Baranova, O.K.; Paver, C.; Smolyar, I. World Ocean Atlas 2018 Volume 2: Salinity; US Department of Commerce, National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2019.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Type | λ1 | λ2 |
|---|---|---|
| bright fringe | L | H− |
| dark fringe | L | H+ |
| bright spot | H− | H− |
| dark spot | H+ | H+ |
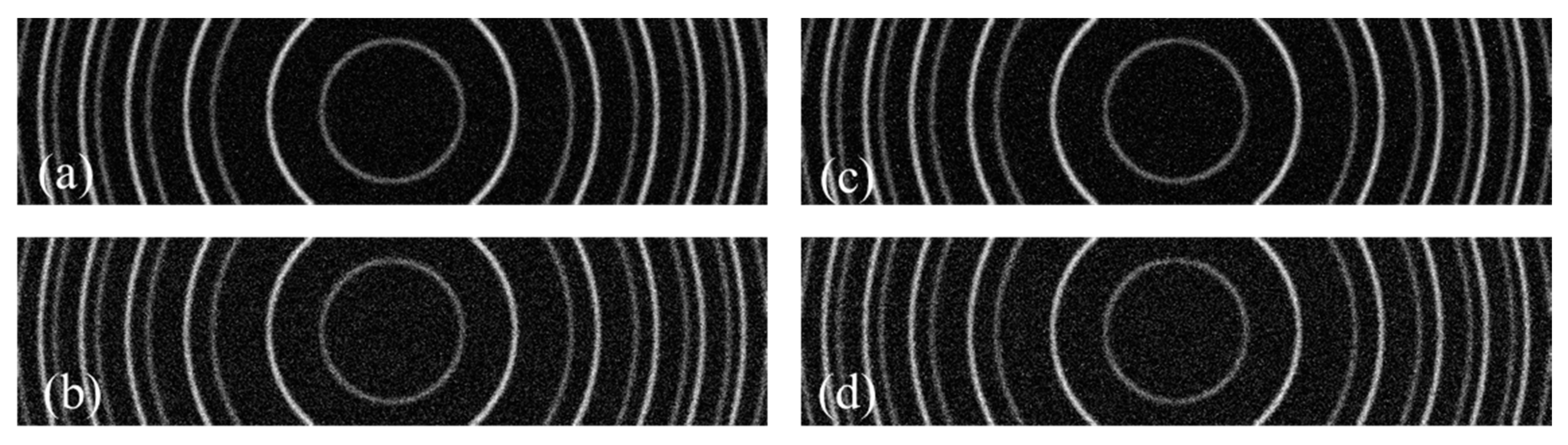
| Simulated Spectra | Noise Type | Δa (Pixel) | Δb (Pixel) | Δr (Pixel) |
|---|---|---|---|---|
| (a) | Gaussian noise 0.025 + salt and pepper noise 0.001 | 0.02 | 0.11 | 0.03 |
| (b) | Gaussian noise 0.05 + salt and pepper noise 0.001 | 0.04 | 0.25 | 0.07 |
| (c) | Gaussian noise 0.025 + salt and pepper noise 0.005 | 0.03 | 0.08 | 0.04 |
| (d) | Gaussian noise 0.05 + salt and pepper noise 0.005 | 0.04 | 0.19 | 0.07 |
| Method | Option | Average Frequency Shift Deviation (MHz) | Average Measurement Uncertainty (MHz) |
|---|---|---|---|
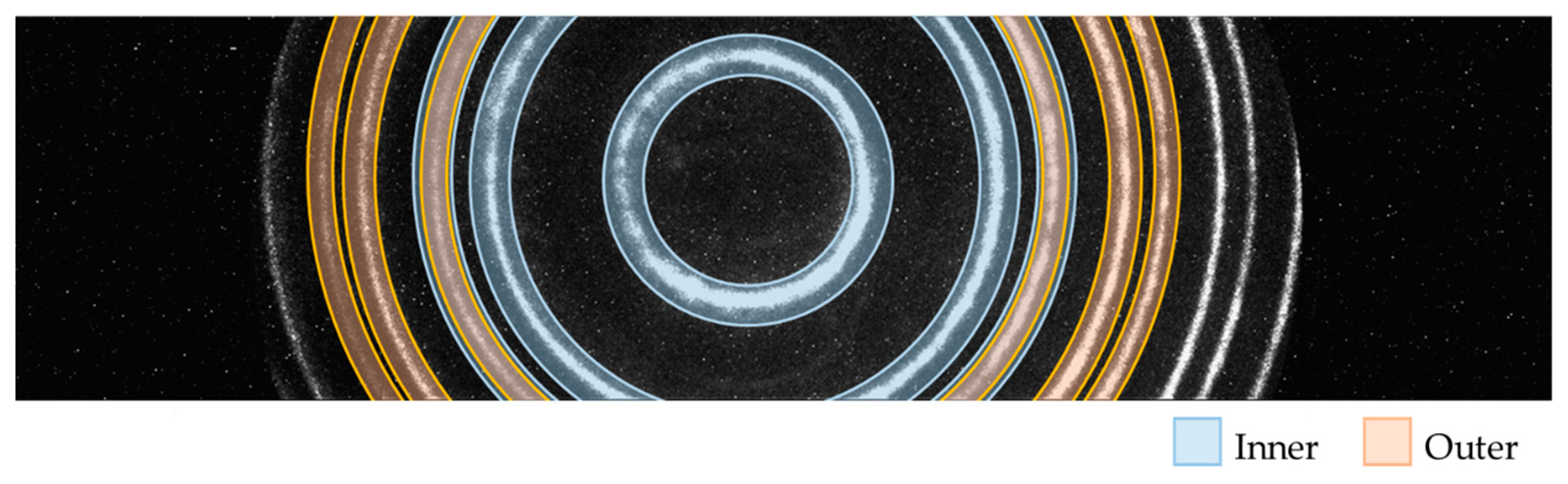
| Proposed | Inner | 3.12 | 4.60 |
| Data fold | 12.88 | 6.36 | |
| Cylindrical lens compression | 9.13 | 8.84 | |
| Proposed | Outer | 3.96 | 7.80 |
| Data fold | 14.20 | 16.66 | |
| Cylindrical lens compression | 16.37 | 10.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Sun, J.; Zhang, X.; Zeng, Z.; Xu, Y.; Luo, N.; He, X.; Shi, J. High-Accuracy Spectral Measurement of Stimulated-Brillouin-Scattering Lidar Based on Hessian Matrix and Steger Algorithm. Remote Sens. 2023, 15, 1511. https://doi.org/10.3390/rs15061511
Liu Z, Sun J, Zhang X, Zeng Z, Xu Y, Luo N, He X, Shi J. High-Accuracy Spectral Measurement of Stimulated-Brillouin-Scattering Lidar Based on Hessian Matrix and Steger Algorithm. Remote Sensing. 2023; 15(6):1511. https://doi.org/10.3390/rs15061511
Chicago/Turabian StyleLiu, Zhiqiang, Jie Sun, Xianda Zhang, Zhi Zeng, Yupeng Xu, Ningning Luo, Xingdao He, and Jiulin Shi. 2023. "High-Accuracy Spectral Measurement of Stimulated-Brillouin-Scattering Lidar Based on Hessian Matrix and Steger Algorithm" Remote Sensing 15, no. 6: 1511. https://doi.org/10.3390/rs15061511