
Prospects of Consumer-Grade UAVs for Overpass Bridges Pier Pads Alignment


Abstract
:1. Introduction
- How to extract the construction geometrical features of the pier pads from the UAV data?
- Does the quality of results from consumer-grade UAV data fit the required engineering quality standards of the inspection?
- What will be achieved by using UAVs for the inspection in terms of time, cost, and safety?
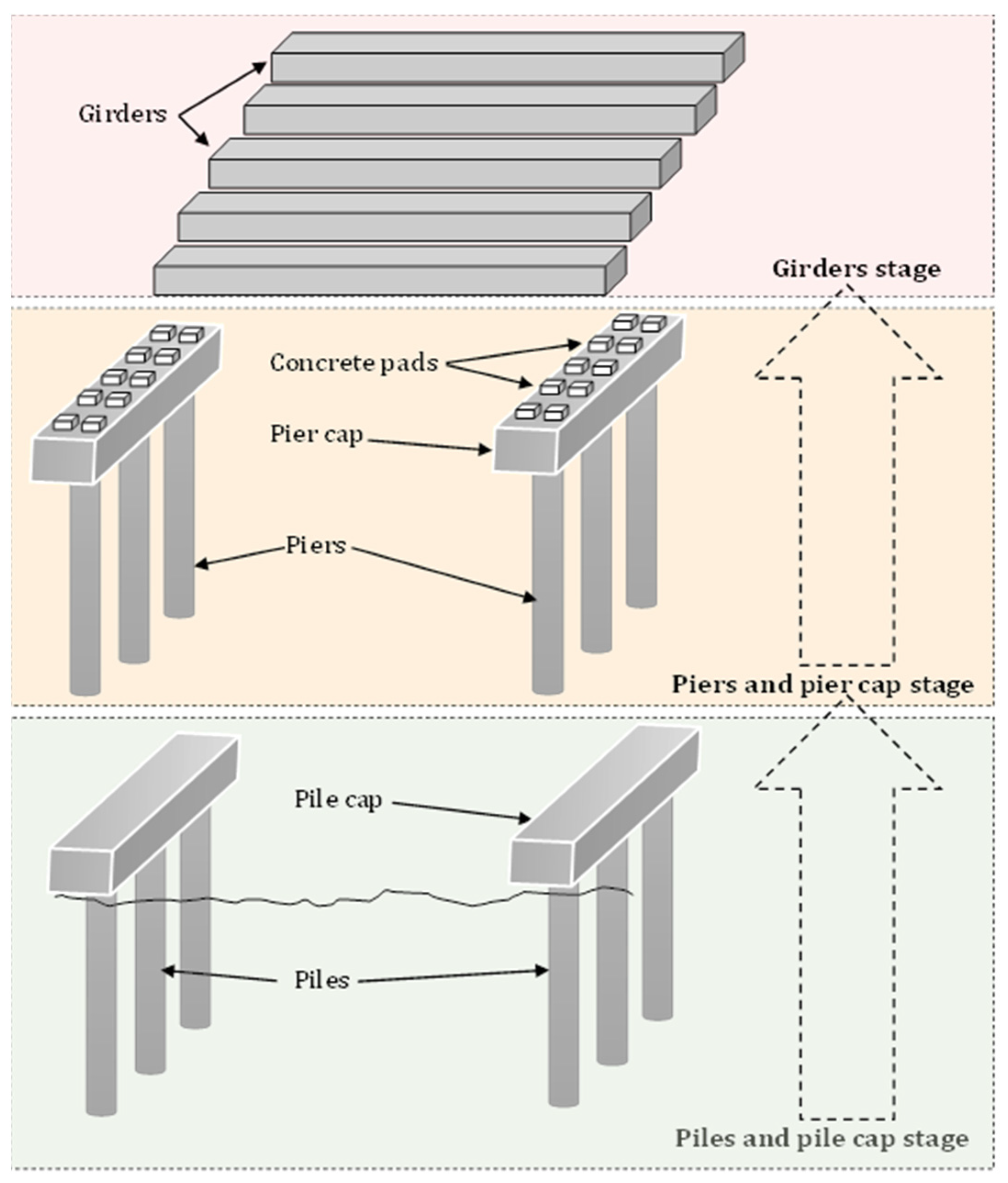
2. Inspection Standards and Tolerances
- The first level for the overall tolerance of the whole structure.
- The second level for the positional tolerance of the structure elements.
- The third level for the dimensional tolerance of the individual elements.
- The fourth level for the positional tolerance inside the individual elements, e.g., reinforcement.
3. Methodologies and Materials
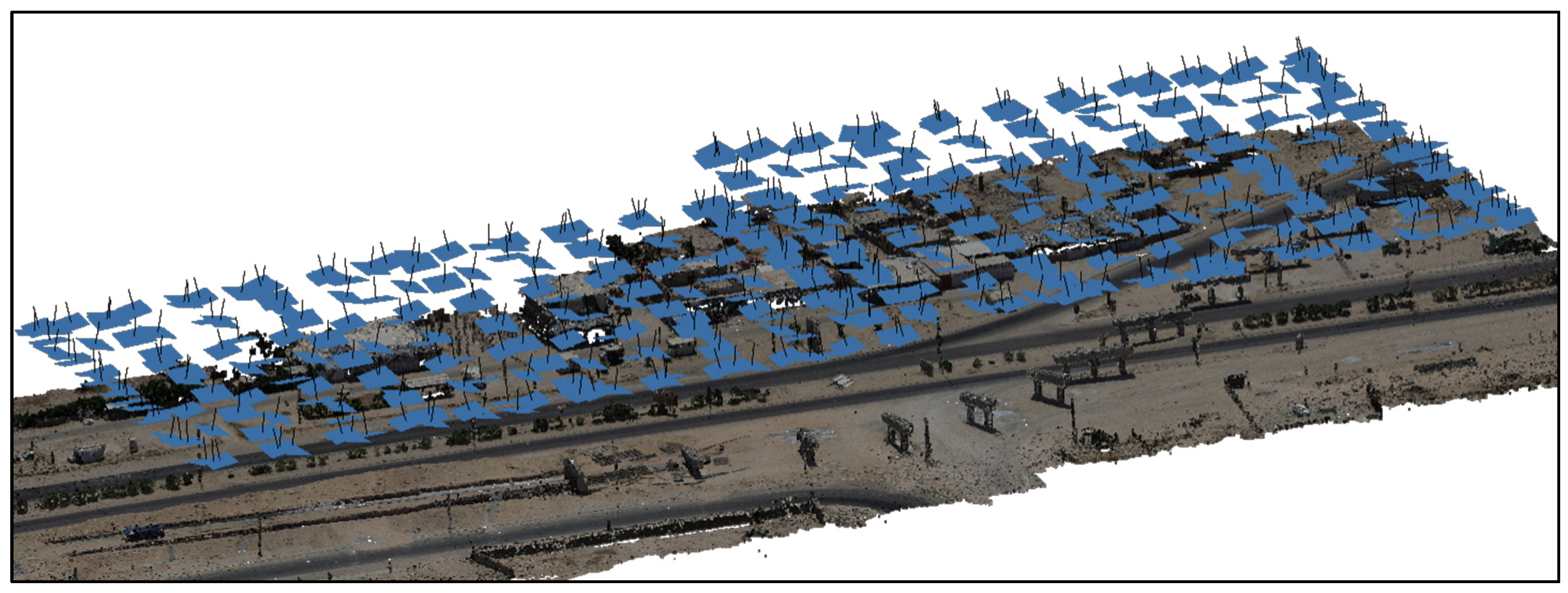
3.1. Flight Plan and Georeferencing Strategy
3.2. Geometrical Features Extraction
- Segmenting the pier cap points out of the site point cloud by using a 3D box with proper dimensions and coordinates as shown in Figure 3.
- Separating the point cloud of each pier using the Connected Component Labelling (CCL) algorithm, as shown in Figure 4.
- Primitive fitting using the Random Sample Consensus (RANSAC) method follows. For the pier pads extraction, sphere primitive is proposed because of the symmetrical shape of the pads. Furthermore, sphere centers and tops are easier to measure and compose in sections. Figure 5 shows an example of the spheres fitting of pier pads by RANSAC.
- The vertices of the created spheres are saved to find the points of highest elevation, which represent the tops of the spheres. The spheres’ tops represent the top centres of pier pads. However, the elevations of these points are inaccurate because the tops of the spheres frequently do not fit very well with the pads’ surface.
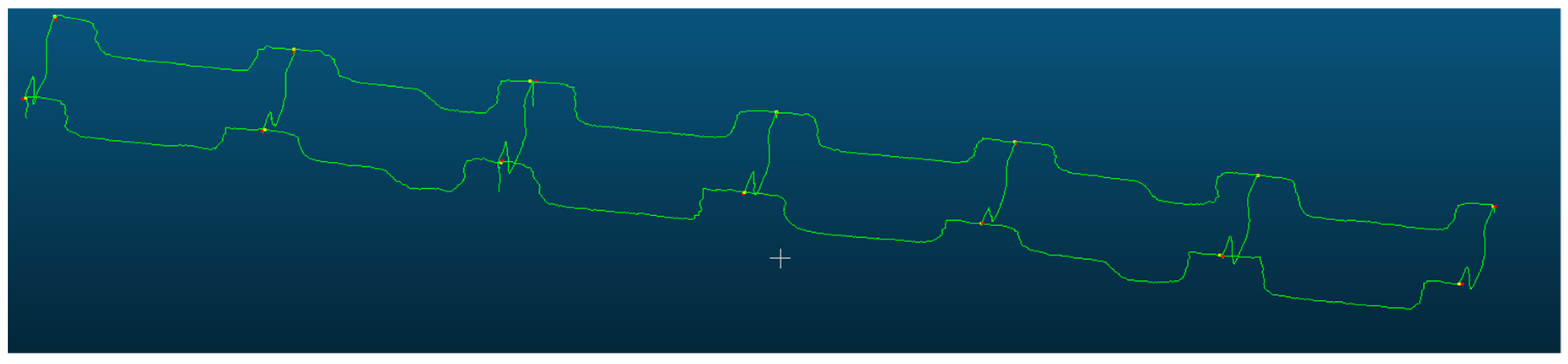
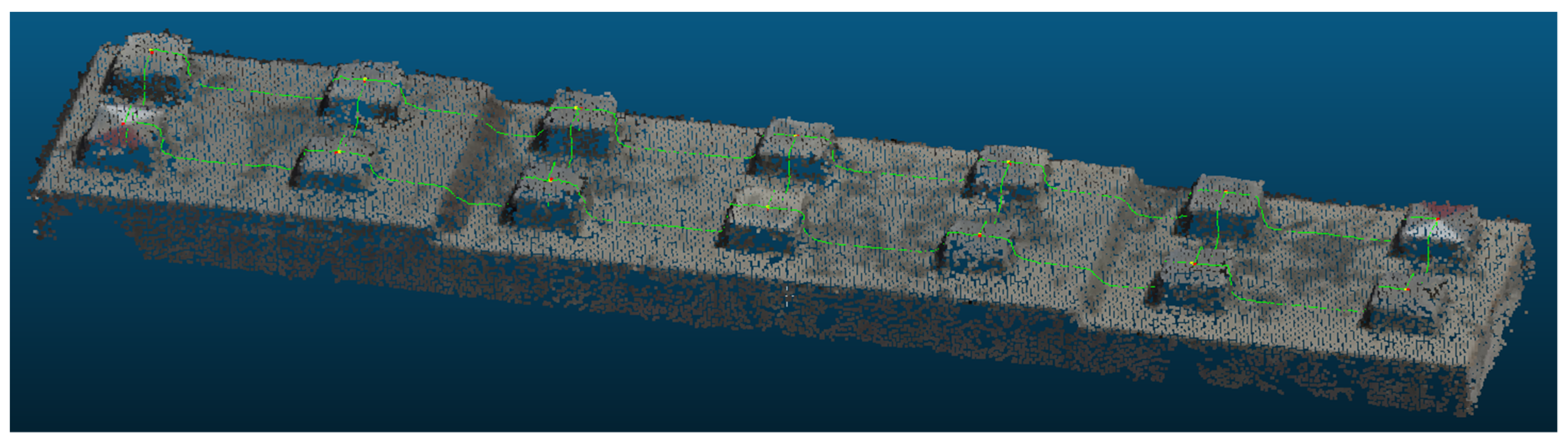
- The extracted pad centers are employed as polylines for the created profile and cross-sections, as shown in Figure 6. Vertices of these sections are also saved to find intersecting points between sections. These points represent the required 3D coordinates of the pier pad centers.
4. Experimental Tests
4.1. First Experiment–Simulated Project
- A total of 80% forward overlap and 60% side overlap.
- A total of 23 m flying height, 6 m airbase, and 15 m separation between flight lines.
4.2. Second Experiment-Real Project
- ➢
- A total of 75% forward overlap and 68% side overlap.
- ➢
- A 30 m flying height, 6 m airbase, and 16 m separation between flight lines.
5. Discussion
5.1. Accuracy
5.2. Time and Cost
5.3. Safety
6. Conclusions
- The required geometry can be extracted from the point cloud by applying a series of computations using RANSAC and extracting point cloud cross-sections. Through RANSAC sphere fitting, it was possible to determine the centre of pier pads automatically while filtering outliers. Consequently, the proposed technique for geometry extraction offered both automation and feasibility in attaining accuracy.
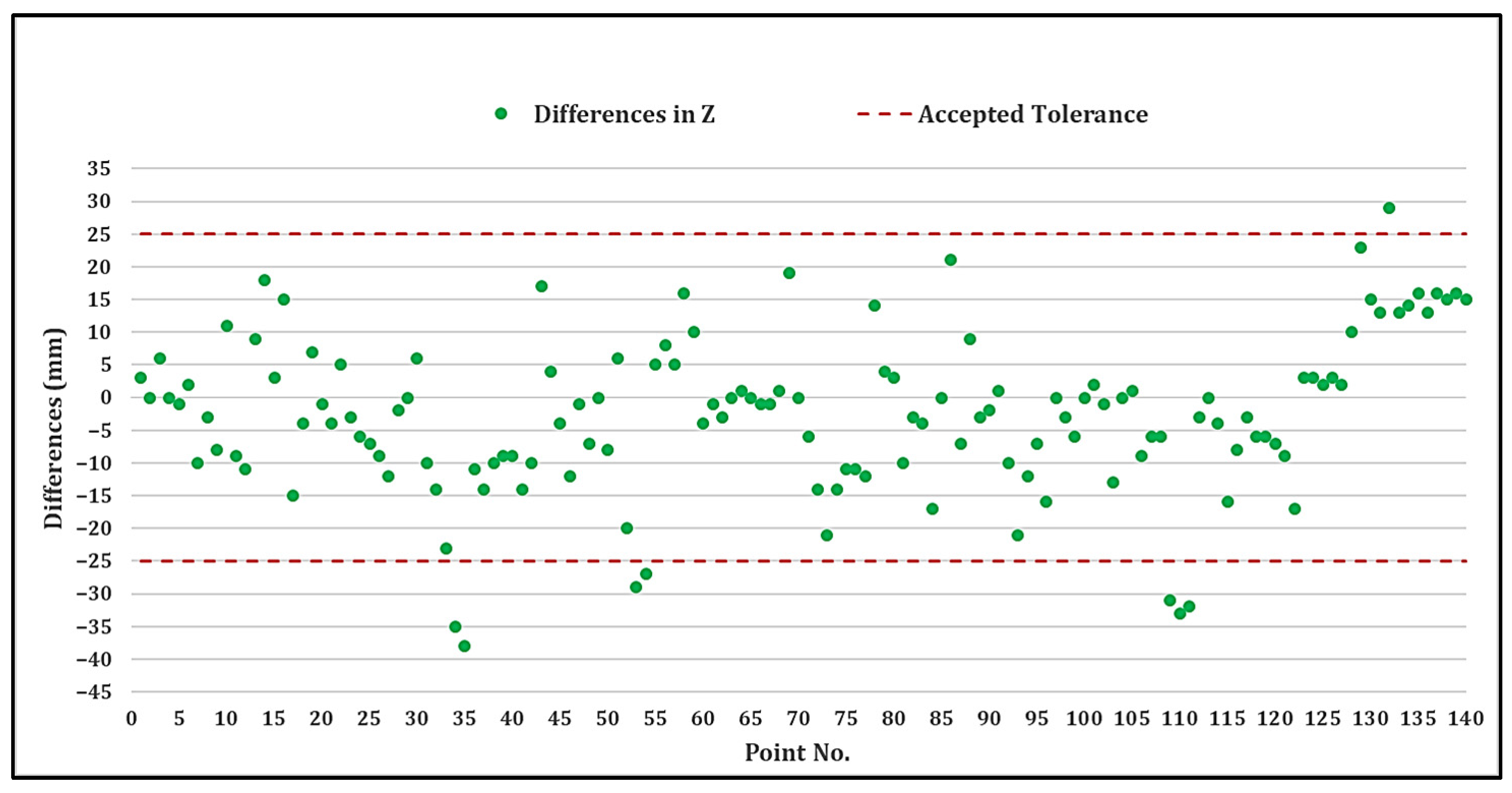
- The results in both experiments of the proposed method are promising and the RMSE of the extracted pier pad points is within the allowable tolerance of the bridge inspection standards. However, the results of about 6% of the individual points were outside of the required accuracy. Hence, the points extraction using the proposed method is expected to be improved when using a better UAV camera such as the DJI Phantom 4 Pro.
- Obviously, the proposed method surpasses the traditional technique in terms of cost, accessibility, portability, safety, and by reducing the fieldwork time. It was found that, by using the proposed method, more than 90% of the fieldwork time is eliminated. Hence, the cost may be reduced and the safety may be improved by a significant percentage.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Martínez-Carricondo, P.; Agüera-Verga, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Watanabe, Y.; Kawahara, Y. UAV photogrammetry for monitoring changes in river topography and vegetation. Procedia Eng. 2016, 154, 317–325. [Google Scholar] [CrossRef]
- Lizarazo, I.; Angulo, V.; Rodríguez, J. Automatic mapping of land surface elevation changes from UAV-based imagery. Int. J. Remote Sens. 2017, 38, 2603–2622. [Google Scholar] [CrossRef]
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining nadir and oblique UAV imagery to reconstruct quarry topography: Methodology and feasibility analysis. Eur. J. Remote Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef]
- Enciso, J.; Jung, J.; Chang, A.; Carlos Chavez, J.; Yeom, J.; Landivar, J.; Cavazos, G. Assessing land leveling needs and performance with unmanned aerial system. J. Appl. Remote Sens. 2018, 12, 016001. [Google Scholar] [CrossRef]
- Gonçalves, G.R.; Pérez, J.A.; Duarte, J. Accuracy and effectiveness of low cost UASs and open source photogrammetric software for foredunes mapping. Int. J. Remote Sens. 2018, 39, 5059–5077. [Google Scholar] [CrossRef]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P.; Moretti, S.; Casagli, N. Multitemporal UAV surveys for landslide mapping and characterization. Landslides 2018, 15, 1045–1052. [Google Scholar] [CrossRef]
- Yeh, F.-H.; Huang, C.-J.; Han, J.-Y.; Ge, L. Modeling slope topography using unmanned aerial vehicle image technique. MATEC Web Conf. 2018, 147, 07002. [Google Scholar] [CrossRef]
- Watson, C.S.; Kargel, J.S.; Tiruwa, B. UAV-derived Himalayan topography: Hazard assessments and comparison with global DEM products. Drones 2019, 3, 18. [Google Scholar] [CrossRef]
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Ontiveros-Capurata, R.E.; Marcial-Pablo, M.d.J. Rapid urban flood damage assessment using high resolution remote sensing data and an object-based approach. Geomat. Nat. Hazards Risk 2020, 11, 906–927. [Google Scholar] [CrossRef]
- Rotnicka, J.; Dłużewski, M.; Dąbski, M.; Rodzewicz, M.; Włodarski, W.; Zmarz, A. Accuracy of the UAV-based DEM of beach–foredune topography in relation to selected morphometric variables, land cover, and multitemporal sediment budget. Estuaries Coasts 2020, 43, 1939–1955. [Google Scholar] [CrossRef]
- Papakonstantinou, A.; Bastaris, M.; Spondylidis, S.; Topouzelis, K. A citizen science unmanned aerial system data acquisition protocol and deep learning techniques for the automatic detection and mapping of marine litter concentrations in the coastal zone. Drones 2021, 5, 6. [Google Scholar] [CrossRef]
- Śledź, S.; Ewertowski, M.W.; Piekarczyk, J. Applications of unmanned aerial vehicle (UAV) surveys and Structure from Motion photogrammetry in glacial and periglacial geomorphology. Geomorphology 2021, 378, 107620. [Google Scholar] [CrossRef]
- Yoon, H.; Shin, J.; Spencer, B.F., Jr. Structural displacement measurement using an unmanned aerial system. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 183–192. [Google Scholar] [CrossRef]
- Jongerius, A. The Use of Unmanned Aerial Vehicles to Inspect Bridges for Rijkswaterstaat. Bachelor’s Thesis, University of Twente, Enschede, The Netherlands, 2018. [Google Scholar]
- Dorafshan, S.; Maguire, M. Bridge inspection: Human performance, unmanned aerial systems and automation. J. Civ. Struct. Health Monit. 2018, 8, 443–476. [Google Scholar] [CrossRef]
- Gerke, M.; Ghassoun, Y.; Alamouri, A.; Bobbe, M.; Khedar, Y.; Plöger, F. High-precision object delineation with UAV–demonstrated on a track system. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 293–299. [Google Scholar] [CrossRef]
- Ghassoun, Y.; Gerke, M.; Khedar, Y.; Backhaus, J.; Bobbe, M.; Meissner, H.; Kumar Tiwary, P.; Heyen, R. Implementation and validation of a high accuracy UAV-Photogrammetry based rail track inspection system. Remote Sens. 2021, 13, 384. [Google Scholar] [CrossRef]
- Debus, P.; Rodehorst, V. Multi-scale flight path planning for UAS building inspection. In Proceedings of the International Conference on Computing in Civil and Building Engineering, São Paulo, Brazil, 18–20 August 2020. [Google Scholar]
- Perry, B.J.; Guo, Y.; Atadero, R.; van de Lindt, J.W. Streamlined bridge inspection system utilizing unmanned aerial vehicles (UAVs) and machine learning. Measurement 2020, 164, 108048. [Google Scholar] [CrossRef]
- Gaspari, F.; Ioli, F.; Barbieri, F.; Pinto, L. Integration of UAV-lidar and UAV-photogrammetry for infrastructure monitoring and bridge assessment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 995–1002. [Google Scholar] [CrossRef]
- Ioli, F.; Pinto, A.; Pinto, L. UAV photogrammetry for metric evaluation of concrete bridge cracks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 1025–1032. [Google Scholar] [CrossRef]
- Fraser, C. Optimization of precision in close-range photogrammetry. Photogramm. Eng. Remote Sens. 1982, 48, 561–570. [Google Scholar]
- Förstner, W. On the Theoretical Accuracy of Multi Image Matching, Restoration and Triangulation; Festschrift zum 65, Geburtstag von Prof. Dr. Ing. mult. G. Konecny; Institut für Photogrammetrie, Universitat Hannover: Hannover, Germany, 1998. [Google Scholar]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Ferrer-González, E.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. UAV photogrammetry accuracy assessment for corridor mapping based on the number and distribution of ground control points. Remote Sens. 2020, 12, 2447. [Google Scholar] [CrossRef]
- Chudley, T.R.; Christoffersen, P.; Doyle, S.H.; Abellan, A.; Snooke, N. High-accuracy UAV photogrammetry of ice sheet dynamics with no ground control. Cryosphere 2019, 13, 955–968. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SFM 3D model accuracy in high-relief landscapes by incorporating oblique images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Wiącek, P.; Pyka, K. The test field for UAV accuracy assessments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 67–73. [Google Scholar] [CrossRef]
- Casella, V.; Chiabrando, F.; Franzini, M.; Maria Manzino, A. Accuracy assessment of a UAV block by different software packages, processing schemes and validation strategies. ISPRS Int. J. Geo-Inf. 2020, 9, 164. [Google Scholar] [CrossRef]
- Agisoft PhotoScan v 1.7; Agisoft LLC: St. Petersburg, Russia, 2010.
- Trimble Inpho UASMaster 7; Trimble, Inc.: Sunnyvale, CA, USA, 2010.
- Pix4D v 4.8; Pix4D S.A.: Prilly, Switzerland, 2011.
- ContextCapture v 1.7; Bentley Systems: Exton, PA, USA, 2021.
- MicMac; French National Geographic Institute: Saint-Mandé, France, 2007.
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.d.J.; Enciso, J. Digital terrain models generated with low-cost UAV photogrammetry: Methodology and accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]
- EN 1090-2:2018; Execution of Steel Structures and Aluminium Structures. CEN: Brussels, Belgium, 2018.
- EN 1994-2-2005; Design of Composite Steen and Concrete Structures—Part 2: General Rules and Rules for Bridges. CEN European Committee for Standardization: Brussels, Belgium, 2005.
- ISO-7976-1; Tolerances for Building-Methods of Measurement of Building Products. ISO: Geneva, Switzerland, 1989.
- ISO-7976-2; Tolerances for Building-Methods of Measurement of Building Products. ISO: Geneva, Switzerland, 1989.
- ISO-17123; Optics and Optical Instruments-Field Procedures for Testing Geodetic and Surveying Instruments. ISO: Geneva, Switzerland, 2014.
- Construct Concrete Structures Group. National Structural Concrete Specification for Building Construction; The Concrete Centre: Surrey, UK, 2010. [Google Scholar]
- ACI 117-10; Specifications for Tolerances for Concrete Construction and Materials (ACI 117-10) and Commentary (ACI 117R-10). American Concrete Institute: Farmington Hills, MI, USA, 2010.
- CloudCompare; Girardeau-Montaut, D.; et al., Paris, France. 2006. Available online: https://www.researchgate.net/project/CloudCompare (accessed on 7 January 2023).
- Blender—A 3D Modelling and Rendering Package Version 2.25; Blender Foundation: Stichting Blender Foundation: Amsterdam, The Nethrlands, 2002.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | The Step | Time-Cost | |
|---|---|---|---|
| 1 | Fieldwork | Flight time | 00 h 30 m 00 s |
| 2 | UAV data acquisition and point cloud reconstruction | Matching | 00 h 13 m 29 s |
| Alignment | 00 h 06 m 42 s | ||
| Camera Optimization | 00 h 00 m 05 s | ||
| Depth maps generation | 01 h 23 m 00 s | ||
| Dense cloud generation | 00 h 07 m 24 s | ||
| 3 | Post-processing and pad centres extraction | Prepare data (crop, segmentation, and classification) | 00 h 30 m 00 s |
| Sectioning | 01 h 40 m 00 s | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaafar, H.A.; Alsadik, B. Prospects of Consumer-Grade UAVs for Overpass Bridges Pier Pads Alignment. Remote Sens. 2023, 15, 877. https://doi.org/10.3390/rs15040877
Jaafar HA, Alsadik B. Prospects of Consumer-Grade UAVs for Overpass Bridges Pier Pads Alignment. Remote Sensing. 2023; 15(4):877. https://doi.org/10.3390/rs15040877
Chicago/Turabian StyleJaafar, Hasan Abdulhussein, and Bashar Alsadik. 2023. "Prospects of Consumer-Grade UAVs for Overpass Bridges Pier Pads Alignment" Remote Sensing 15, no. 4: 877. https://doi.org/10.3390/rs15040877