By using the adaptive shadow segmentation threshold, an improved approach with the obtained WSFV and SVR algorithm was proposed for extracting the SWH from the X-band marine radar images. When compared to the traditional shadow statistical approach and the reference value, the performance of the proposed approach for extracting the SWH, based on the constituted WSFV from the collected shore-based radar image, was verified and analyzed.
5.2. Experimental Results
Figure 3 is an original radar image that was collected; the bright and dark streaks on the vertical part of the image are the field of the sea observation areas. The heading is about
. The down and up parts of the radar image represent the sea wave and the ground echo, respectively. The measurement radius of the collected radar image is roughly 4500 m. From
Figure 3, it can be observed that the echo intensity of the ground is higher than that of the sea wave, and the texture of the sea clutter in the collected radar image is almost at saturation near the antenna. The same radar data from 8 to 19 November 2014 and from 10 to 20 January 2015 in [
35] were utilized to certify the effectiveness of the improved SSM. The wave texture characteristic of the sea waves in the radar images looks similar when the sea condition changes a little.
For the SWH inversion formula in [
35], the traditional SSM is improved by using a shallow water condition correction strategy due to the influence of the water depth. Thus, the proposed method in [
35] is suitable for both the deep water area and the nearshore shallow water area. However, the retrieving accuracy is not always ideal for X-band marine radar images since the geometrical optics theory may work under low wind speeds based on the confidence predictor for using geometrical optics. Therefore, in this paper, the research focuses on improving the accuracy of the SWH for the SSM under low wind speeds.
The analysis area selected
from
Figure 3 is shown in
Figure 4. The horizontal co-ordinate is the azimuth, and the vertical co-ordinate is the range. The selected analysis area is at least 400 m away from the radar system due to the echo signal saturation near the radar antenna. Considering that the echo intensity decays nonlinearly with increase in the distance to the radar platform, the far boundary of the selected analysis area is 2400 m.
In order to obtain the gradient images
, eight different operators
are used to convolve with the selected area of the radar image. The edge image
is obtained after filtering out the noise in the gradient images and superimposing the eight gradient images, which is shown in
Figure 5.
The fixed shadow threshold denotes taking the mode on the histogram for the entire shadow image. Based on the achieved edge image
, the non-zero in each distance line of the edge image could be determined. Thus, the optimal number of separated blocks
L in the distance direction is obtained based on the Formula (
9). After obtaining the
i-th block of the shadow image and the corresponding histogram, the shadow segmentation threshold of each block could be determined by taking the mode on each histogram. Thus, the adaptive shadow segmentation threshold was obtained by smoothing each shadow segmentation threshold in the distance direction. Based on the characteristic of the edge image and the distance resolution of the radar data, the optimal number of blocks
is determined by using (
7) and (
9). Then, the corresponding segmentation position can be determined.
Figure 6 presents the adaptive shadow segmentation threshold obtained by utilizing the proposed strategy. The horizontal and vertical axes represent the distance to the radar platform and the threshold value, respectively. The blue solid line is the estimated shadow segmentation threshold of 1250 based on the original SSM. The pink circle represents the shadow segmentation threshold estimated in each block by the proposed method. By fitting the threshold estimated in each block with the quadratic polynomial (
10), the red solid curve represents the adaptive shadow segmentation threshold, which changes with the span of the radar platform.
At a distance of approximately 1100 m from the radar platform, the shadow threshold of the proposed strategy is larger compared to the original SSM. In the near range to the radar platform, the grazing angle is greater than . The adaptive shadow threshold increases from 400 m to 1100 m since the electromagnetic wave can illuminate most of the sea surface. However, the adaptive shadow threshold decreases from 1100 m to 2400 m since the echo intensity of the wave signal decreases with distance.
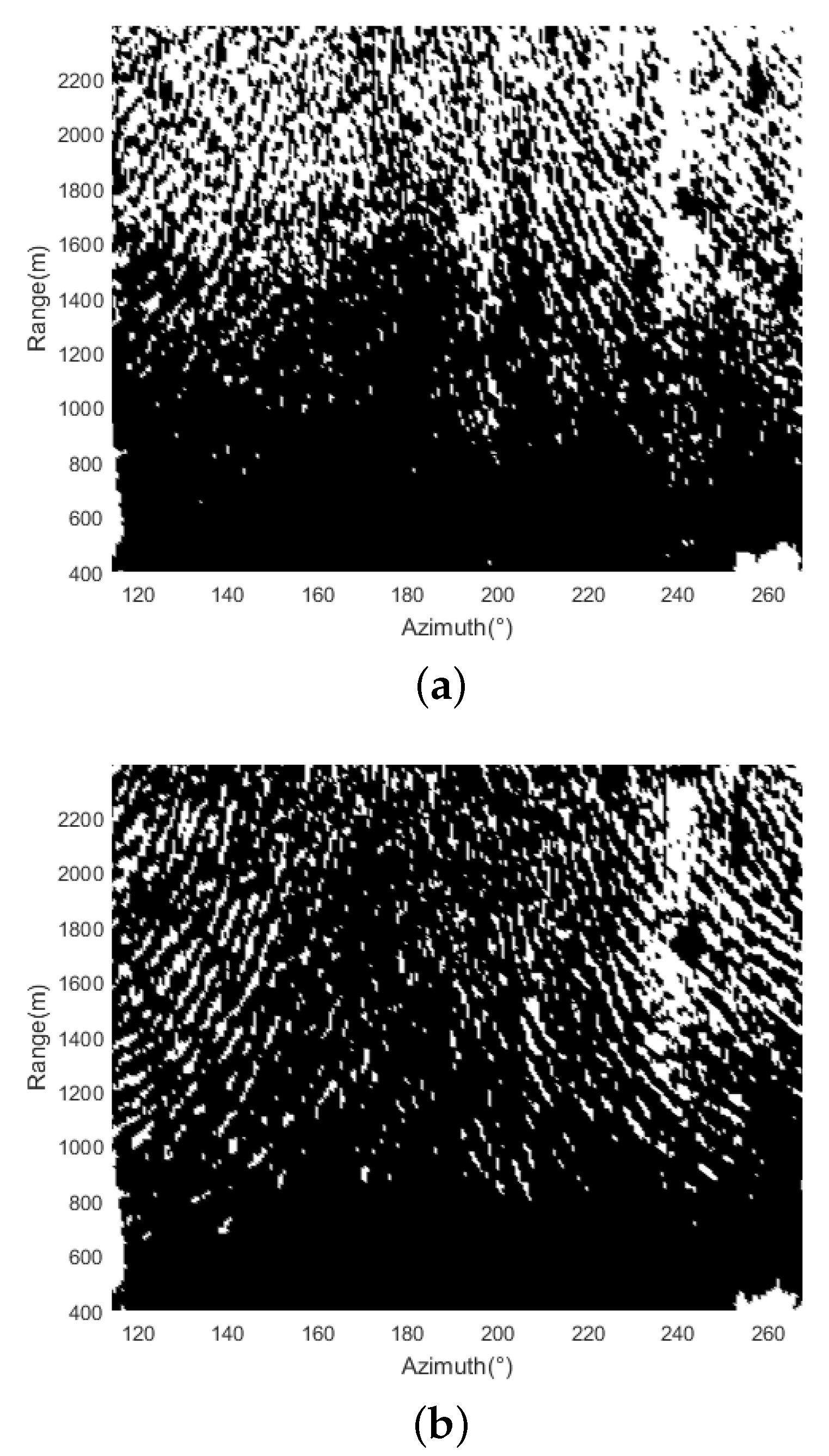
By using the calculated shadow segmentation threshold, the shadow image of the selected analysis area is shown in
Figure 7.
Figure 7a is the achieved shadow image based on the traditional SSM.
Figure 7b is the achieved shadow image obtained by utilizing the proposed adaptive shadow segmentation threshold. The black areas of the shadow image indicate nonshadow areas that can be observed by radar, whereas the white areas indicate shadow areas blocked by front-high waves. In comparison, it can be observed that the shadow areas in
Figure 7b are less than those in
Figure 7a, especially in the far area of the analysis area selected for the radar platform. The shadow areas near the radar are almost the same since the grazing angle is relatively large, and the sea surface can almost be illuminated by the emitted electromagnetic wave. For the proposed strategy, the attenuation of the echo intensity with distance is appropriately considered. The shadow areas of the analysis areas can be more accurately distinguished. By using the adaptive shadow segmentation threshold, this avoids the bright stripe with a weak echo in the far area being misinterpreted as the shadow area due to the attenuation of the radar echo in the distance.
For the
in the azimuth of the radar image, the look direction of the radar is perpendicular to the wave direction. Based on the long peak wave hypothesis, most sea waves can be observed, and the shadow area almost does not exist. From
Figure 7b, it can be observed that the area near the
in the azimuth is almost the nonshadow area. For the
in the azimuth, which is parallel to the wave direction, the estimated shadow areas are similar to those of the traditional SSM.
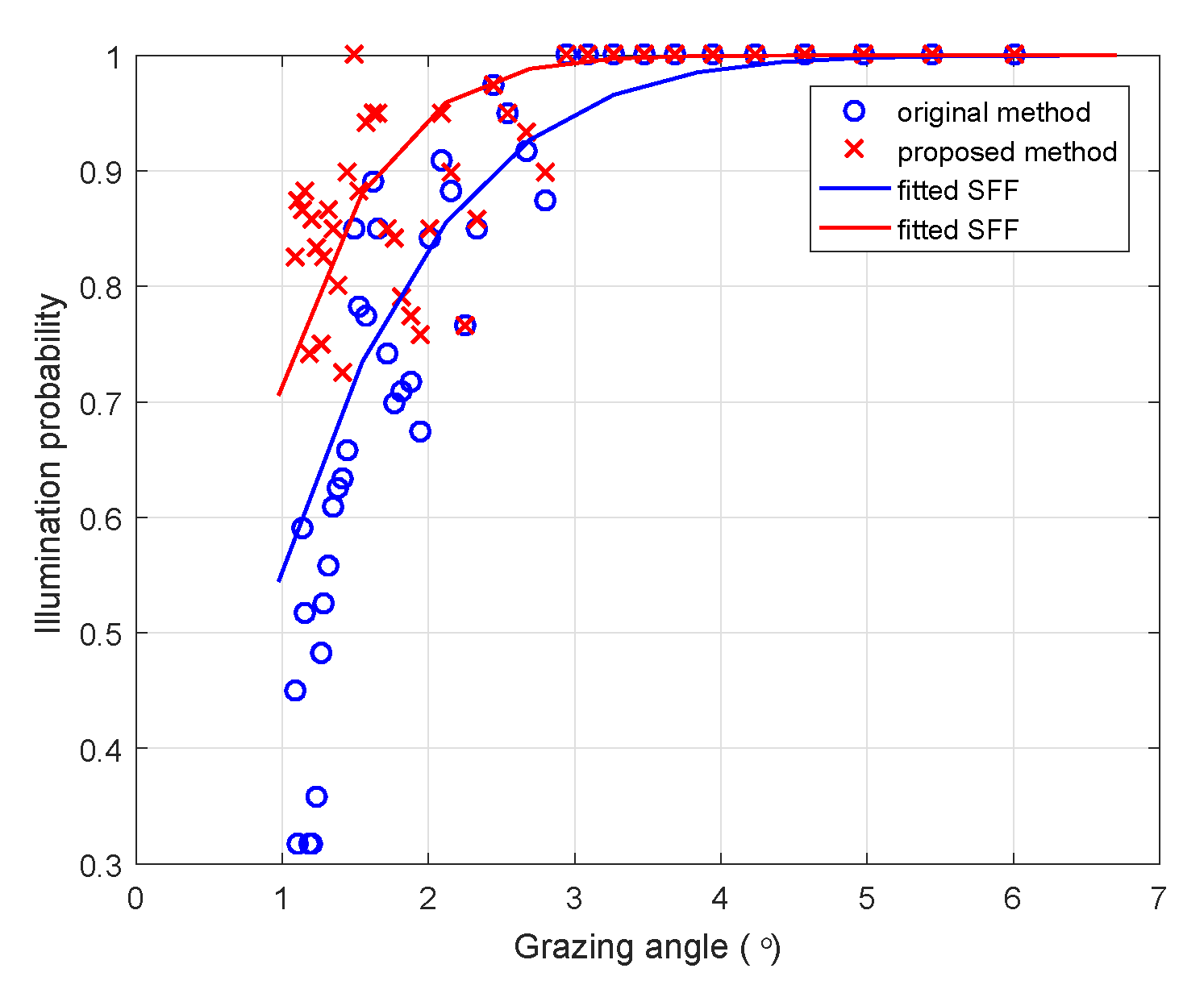
Once the captured shadow image has been segmented into blocks, the shadow ratio function and the illumination ratios in each partition can be obtained. Using the Smith fitting function, the WS for each partition can be calculated with the derived illumination probability. For a partition, the calculated illumination probability and the obtained Smith fitting function as a function of the grazing angle are presented in
Figure 8. The horizontal and vertical axes are the grazing angle and the calculated illumination probability. The red cross and the blue circle are the calculated illumination ratio from the shadow images using the traditional and proposed statistical approaches, respectively. The red dashed line and the blue line are fitted with the Smith function, co-ordinated with the probability of illumination. When the adaptive shadow segmentation threshold is used, the illumination probability increases for the low grazing angle compared to that of the traditional shadow threshold. For grazing angles greater than
, the obtained illumination probabilities based on the traditional and the adaptive shadow threshold are similar.
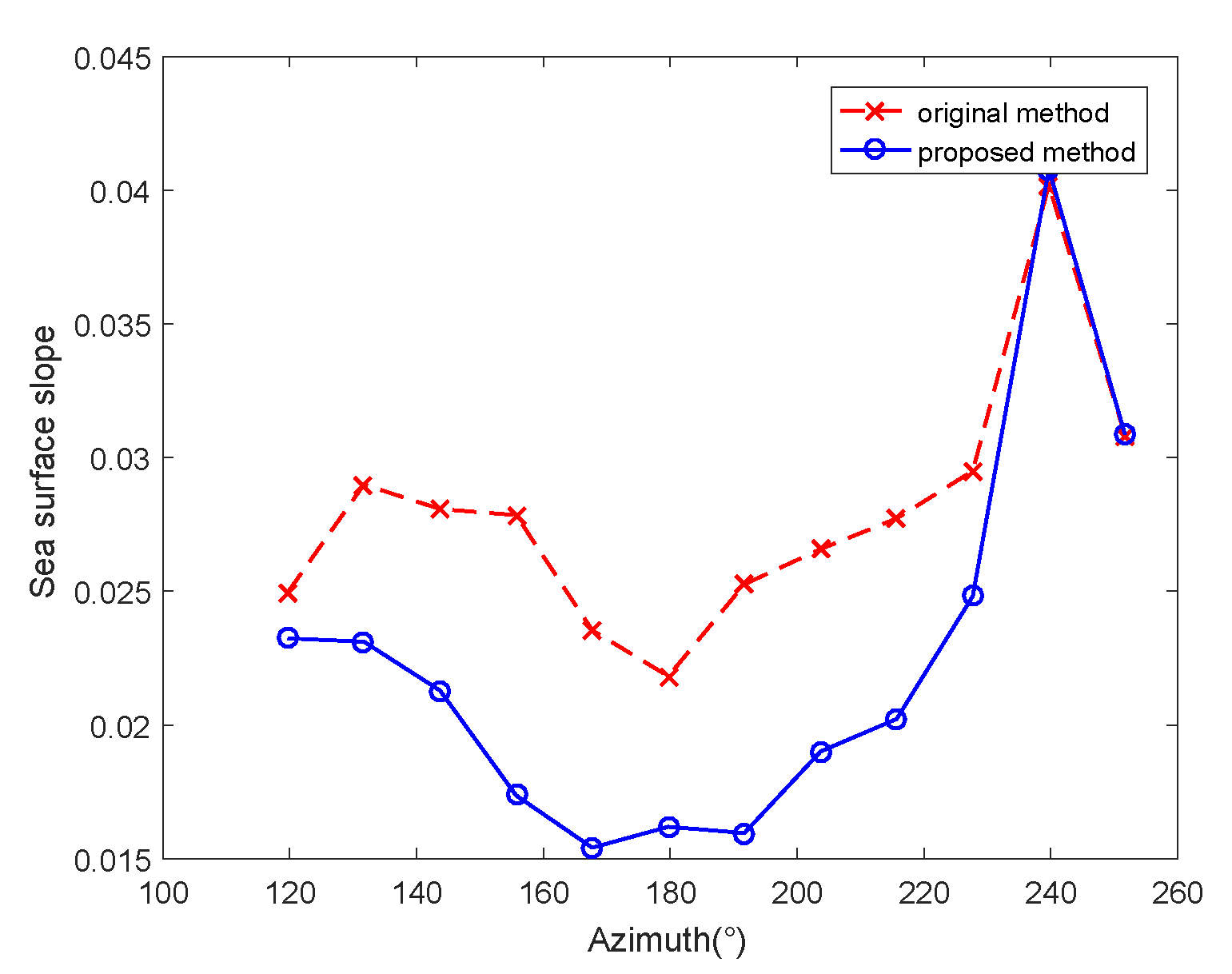
When using the traditional SSM with a fixed threshold, the shadow ratio will increase in the distance direction due to the weak backscatter in the distance. Then, the sea surface slope and the SWH will be overestimated [
31,
32]. However, the estimated sea surface slope decreases when the adaptive shadow threshold is utilized.
The calculated sea surface slope based on the fixed shadow threshold and the adaptive shadow segmentation threshold in the azimuth is presented in
Figure 9. The vertical and horizontal axes represent the obtained RMS sea surface slope and the azimuth, respectively. The red dashed line with the cross indicates the calculated WS based on the traditional hard shadow segmentation method. The blue solid line with the circle is the calculated WS based on the proposed adaptive shadow segmentation threshold. By averaging the WS in each partition, the averaged RMS WS based on the traditional and the proposed SSM can be obtained. It can be observed that the achieved sea surface slope in the azimuth and the averaged RMS based on the adaptive shadow threshold proposed are less than that of the original SSM.
From
Figure 9, it can be seen that the WSFV can be constituted by utilizing the obtained sea surface slope in the azimuth. Then, the extracted feature vectors from the dataset are randomly divided into training and test sets, which are utilized to train the model and to verify the retrieving accuracy. Thus, the SWH is calculated by inputting the extracted WSFV of the test set into the SVR model. In order to certify the suitability of the proposed approach, the performance of the adaptive shadow segmentation threshold, the SVR technology, and the constituted feature vector are analyzed below.
Since the wave buoy works for 20 min per hour and outputs one record per hour, the retrieved SWH from the radar data for 20 min is averaged to minimize the error between the buoy records and the SWH extracted from the radar image. The 222 feature vectors are randomly divided into training and test datasets. The training set containing 111 feature vectors is used to achieve the weight and bias parameters. The test set is used to verify the performance of the proposed method. The extracted SNR from the training set is used to obtain the coefficient of the linear relation.
Figure 10 is the retrieved SWH based on the radar images and the buoy record. The vertical axis and the horizontal axis represent the SWH and the number of the experimental set, respectively. Since the performance of the different retrieving SWH methods are compared,
Figure 10a,b are used to better illuminate the differences in the retrieved SWH based on the test set.
M1 denotes the estimated SWH based on the extracted SNR and the ideal linear relationship to the SNR; M2 is the original SSM, and M3 is the shadow statistical approach using the proposed adaptive shadow segmentation threshold. For M2 and M3, the SWH is estimated based on the relationship of the theoretical derivation to the zero-crossing period and the averaged RMS WS. Instead of using the derivative relationship, the SVR machine learning technology is introduced to calculate the SWH. M4 is the retrieving method based on the SNR and SVR. For M5, the SVR is utilized to achieve the SWH based on the obtained RMS WS compared to M2. For M6, the adaptive shadow segmentation threshold and the SVR are used. Compared to M5 and M6, the constituted feature vector based on the obtained WS in the azimuth is considered in M7 and M8, respectively.
Figure 11 and
Figure 12 are the corresponding wind speed and wave direction, respectively. From
Figure 12, it can be observed that the domain wave direction is rarely contained in the selected analysis area.
From
Figure 10a, it can be observed that the SNR-based method, M1, has the most significant errors compared to the others. Commonly, the SWH increases with increase in the wind speed. Based on the buoy record, it could be observed that the SWH mainly concentrates on the range of 1–2 m. The parameters of the linear relation are determined based on the radar data under low sea conditions. Thus, the M1 algorithm does quite well, except when the wave height is large, such as for samples 15–30 and 75–90. During the period covered by samples 30–40, the retrieving accuracy of the SWH deteriorates, since the wind speed rapidly decays and the wave direction significantly changes. Although the SSM method M2 should have better retrieving accuracy than the spectrum analysis method M1, the performance of the M2 method may be better during the period covered by samples 96–105 since the wind speed decays. By combining the extracted SNR with SVR technology, the retrieving accuracy is greatly improved. When the adaptive segmentation threshold is adopted, the retrieved SWH fluctuates slightly compared to the original SSM. However, the difference is not significant in terms of whether to use the adaptive threshold. From
Figure 10b, the retrieving SWH from the radar images fluctuated closely with the buoy record, especially when using the constituted WSFV. The SWH calculated by the proposed method is closest to the wave buoy record. The deviation between the reference and the extracted SWH by using the proposed method is slight.
When the ratio of the training set to the test set is 1:1, the scatterplot between the estimated SWH and the wave buoy record is investigated in detail based on radar Dataset 1, which contains 222 radar image sequences.
Figure 13 is the estimated SWH based on the 3D fast Fourier transform (FFT) spectral analysis method. The horizontal axis and vertical axis indicate the reference value and the retrieved SWH from the radar images, respectively. It can be observed from the point density that the calculated SWH with the 3D FFT approach is mainly concentrated in the range of 0.5∼2.5 m and is lower than the buoy record. The mean bias (BIAS), mean absolute error (MAE), correlation coefficient (CC), and root mean square error (RMSE) are −0.57 m, 0.35 m, 0.57, and 0.73 m, respectively.
The retrieved SWH with the SSM is illuminated in
Figure 14.
Figure 14a is a scatterplot of the SWH using the original SSM. The BIAS, MAE, CC, and RMSE are −0.34 m, 0.26 m, 0.59, and 0.56 m, respectively. Although the performance is more promising than that of the 3D FFT method, the retrieving accuracy of SWH is not ideal. The point density using the presented adaptive shadow segmentation threshold for the SSM is illustrated in
Figure 14b. The BIAS, MAE, CC, and RMSE are −0.38 m, 0.25 m, 0.63, and 0.57 m, respectively. Although the MAE and RMSE are close to that of the original statistical approach, the CC increases by 0.04.
In practice, it is not always possible to retrieve the wave parameters from the shore-based radar images in the sub-area around the upwind direction, which typically has the strongest echo intensity. In this paper, the scatter echo intensity of the shore-based radar images in the downwind direction has to be used to retrieve the SWH due to the influence of the surrounding terrain. Thus, the extracted SWH contains considerable errors based on the 3D FFT and the shadow statistical approaches.
In order to verify the effectiveness of the SVR technology, the performance of the retrieved SWH is presented in
Figure 15. Instead of using the linear relationship between the SWH and the SNR, the retrieved SWH based on the SNR and SVR is illuminated in
Figure 15a. The BIAS, MAE, CC, and RMSE are −0.09 m, 0.17 m, 0.76, and 0.37 m, respectively. Compared to the traditional 3D FFT approach in
Figure 13, the MAE and RMSE decrease by 0.18 m and 0.36 m, respectively. The CC increases by 0.19. The SVR technology can enhance the retrieving precision of the SWH for the SNR feature. A scatterplot of the extracted SWH using the averaged WS and SVR technology is given in
Figure 15b. The BIAS, MAE, CC, and RMSE are −0.06 m, 0.22 m, 0.61, and 0.44 m, respectively. Although SVR is adopted, it can be observed that the retrieving accuracy of the SWH is lower than that based on the SNR feature compared to
Figure 15a. A scatterplot of the extracted SWH, obtained by utilizing the adaptive shadow segmentation threshold from the SSM and SVR technology, is given in
Figure 15c. The BIAS, MAE, CC, and RMSE are −0.11 m, 0.18 m, 0.78, and 0.38 m, respectively. The performance of the extracted SWH is close to that based on the SNR feature. The SVR technology can enhance the extraction accuracy. Compared to
Figure 15b, the MAE and RMSE decrease by 0.04 m and 0.06 m, respectively, and the CC increases by 0.17 when the adaptive threshold is used. It is observed that the adaptive shadow segmentation threshold can greatly improve the retrieving accuracy of the SWH when the machine learning technology SVR is used.
Since the echo intensity of the radar image depends on the wind direction, the echo intensity in the downwind and upwind directions approaches the minimum and maximum for the X-band HH polarization radar. Thus, the calculated WS and SWH in the azimuth are different when using the chosen analysis area from the radar images. In order to solve this problem, the WSFV in the azimuth is constituted in this paper. The point density based on the constituted WSFV in the azimuth and the SVR is presented in
Figure 16.
Figure 16a is the estimated SWH based on the original shadow threshold, the constituted WSFV, and the SVR technology. The BIAS, MAE, CC, and RMSE are −0.04 m, 0.16 m, 0.80, and 0.33 m, respectively. A point density scatterplot of the proposed method utilizing the adaptive shadow segmentation threshold, the constituted WSFV, and SVR is presented in
Figure 16b. The BIAS, MAE, CC, and RMSE are −0.03 m, 0.14 m, 0.86, and 0.28 m, respectively. Compared to
Figure 16a, it can be observed that the MAE and RMSE are reduced by 0.02 m and 0.05 m, and the CC increases by 0.06. From
Figure 16b, the proposed approach in this paper has the best retrieving accuracy from the shore-based radar images compared to the other methods.
Table 1 shows the experimental performance of the retrieved SWH when using radar Dataset 1, collected in January 2015.
Firstly, the performance of the adaptive shadow segmentation threshold is described in detail when the ratio of the training set to the test set is 1:1. When comparing M3 to M2, the CC increases by 0.04. However, the MAE and the RMSE are close. When comparing M6 to M5, it can be observed that the MAE and the RMSE are reduced by 0.04 m and 0.06 m, and the CC increases by 0.17 when the adaptive shadow segmentation threshold is used. When comparing M8 to M7, it can be observed that the MAE and RMSE are reduced by 0.02 m and 0.05 m, and the CC increases by 0.06. Thus, the MAE and RMSE are reduced, and the CC is greatly increased when the adaptive shadow segmentation threshold is used. The adaptive threshold approach can enhance the retrieving accuracy of the SWH for the average wind speed of 5∼10 m/s.
Secondly, the performance of the SVR technology is considered for the shadow statistical approach when the ratio of the training set to the test set is 1:1. When comparing M5 to M2, it can be observed that the MAE and RMSE are reduced by 0.04 m and 0.12 m, and the CC increases by 0.02 when the SVR technology is used. When comparing M6 to M3, it can be observed that the MAE and RMSE are reduced by 0.07 m and 0.19 m, and the CC increases by 0.15 when the SVR technology is used. It is observed that the retrieving accuracy of the SWH is greatly improved when the SVR technology is adopted. The SVR method, which solves different regression problems, considers data errors and model generalization. Therefore, when compared with the original inversion method M2 of the SWH, the SVR-based approach can significantly enhance the inversion accuracy. When compared with M2, M3, and M5, M6 has good performance since both the adaptive shadow segmentation threshold and the SVR technology are introduced into the shadow statistical method.
Finally, the effectiveness of the constituted feature vector based on the obtained WS in the azimuth is certified. When comparing M7 to M5, it can be observed that the MAE and RMSE are reduced by 0.06 m and 0.11 m, and the CC increases by 0.19 when the constituted feature vector is used. When comparing M8 to M6, it can be observed that the MAE and RMSE are reduced by 0.04 m and 0.10 m, and the CC increases by 0.08 when the constituted feature vector is used. During the process of retrieving the SWH, instead of using the averaged RMS WS extracted from the selected analysis area, M7 and M8 have high performance compared to M5 and M6, respectively. Both the MAE and RMSE are reduced, and the CC is increased. The constituted feature vector could solve the problem that the analysis area of the upwind direction could not always be obtained from the radar images for the shore-based marine radar. The experimental results reveal that the inversion accuracy of the SWH is higher, and the error is smaller when the constituted WSFV is used.
In addition, it can be seen from
Table 1 that the retrieving accuracy of the SWH increases with increase in the training set. The proposed approach, M8, which uses the adaptive threshold method, constituting the WSFV and SVR technologies, has the highest retrieving accuracy based on the collected shore-based radar data when the proportions of the radar data in the training set to the test set are 1:2 and 1:1. However, the CC and RMSE of M8 is close that of the M7 when the ratio of the training set to the test set is 2:1. With increase in the training set, the effect of the adaptive threshold method is relatively weak since more radar data with a high wind speed are selected as the training set. More radar data under low wind speeds should be utilized to further verify the effectiveness of the adaptive shadow segmentation threshold.
Table 2 shows the experimental performance of the retrieved SWH when using 258 sets of radar data collected in November 2014. From
Table 2, it can be seen that the shadow statistical methods with the combined feature vector and the SVR technology have a relatively high retrieval accuracy. However, the performance of these methods with the adaptive shadow segmentation threshold is a little lower than for the methods without utilizing the adaptive shadow segmentation threshold.
Based on the comparison between M3 and M2 in
Table 2, it can be observed that when using the adaptive shadow segmentation threshold, the SWH accuracy is close to that when using the traditional shadow threshold. The traditional shadow method was developed based on geometric optics theory and is suitable for Dataset 2 with high wind speeds. However, under low wind speed conditions, the performance of using an adaptive shadow segmentation threshold strategy is superior to that of using the traditional shadow threshold.
When the ratio of the training set to the test set is 1:1, the retrieved SWH based on the traditional SNR method, M1, has high errors for high wind speeds. However, the performance of M4 significantly improved compared to M1 when the SVR technology was introduced. The BIAS, MAE, and RMSE reduced by 0.71 m, 0.2 m, and 0.46 m, respectively. The CC increased by 0.15.
From
Table 2, it can also be seen that the constructed feature vectors can further improve the inversion accuracy of the shadow method under high wind speeds. Compared to M7 and M5, the MAE and RMSE decreased by 0.03 m and 0.05 m, respectively, and the CC increased by 0.06. Meanwhile, the MAE and RMSE decreased by 0.03 m and 0.04 m, respectively, and the CC increased by 0.05 compared to M8 and M6. Thus, this indicates that using the feature vector method can further improve the accuracy of the SWH.
Based on the above analysis, we infer that the effect of the constituted WSFV on improving the retrieval accuracy is dominant. It can be seen that the proposed method with the combined WSFV and SVR technology always improves the CC and decreases the RMSE for both Dataset 1 and Dataset 2.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}