Correction: Lanz et al. The InflateSAR Campaign: Developing Refugee Vessel Detection Capabilities with Polarimetric SAR. Remote Sens. 2023, 15, 2008

 ,
,  , , ,
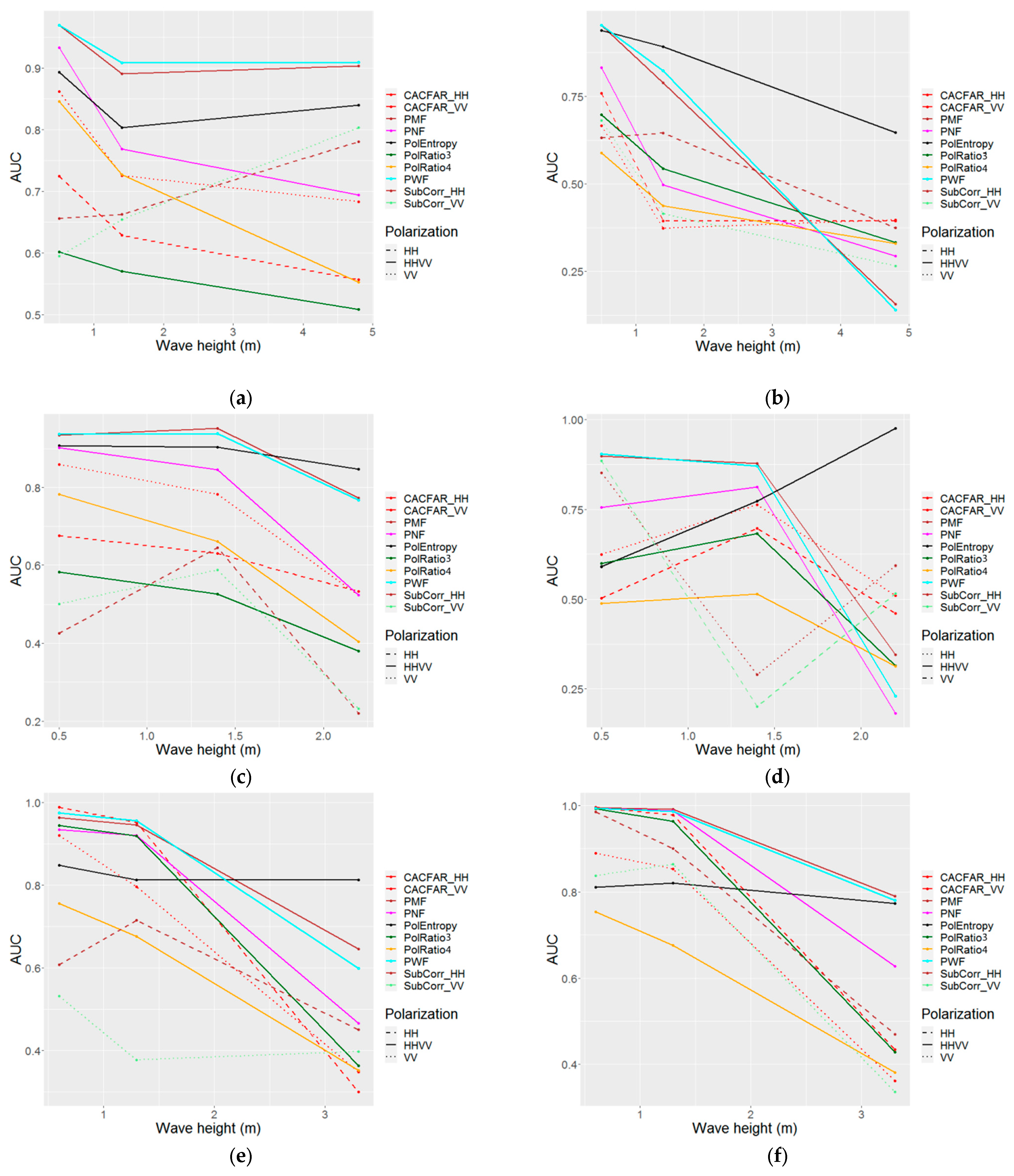
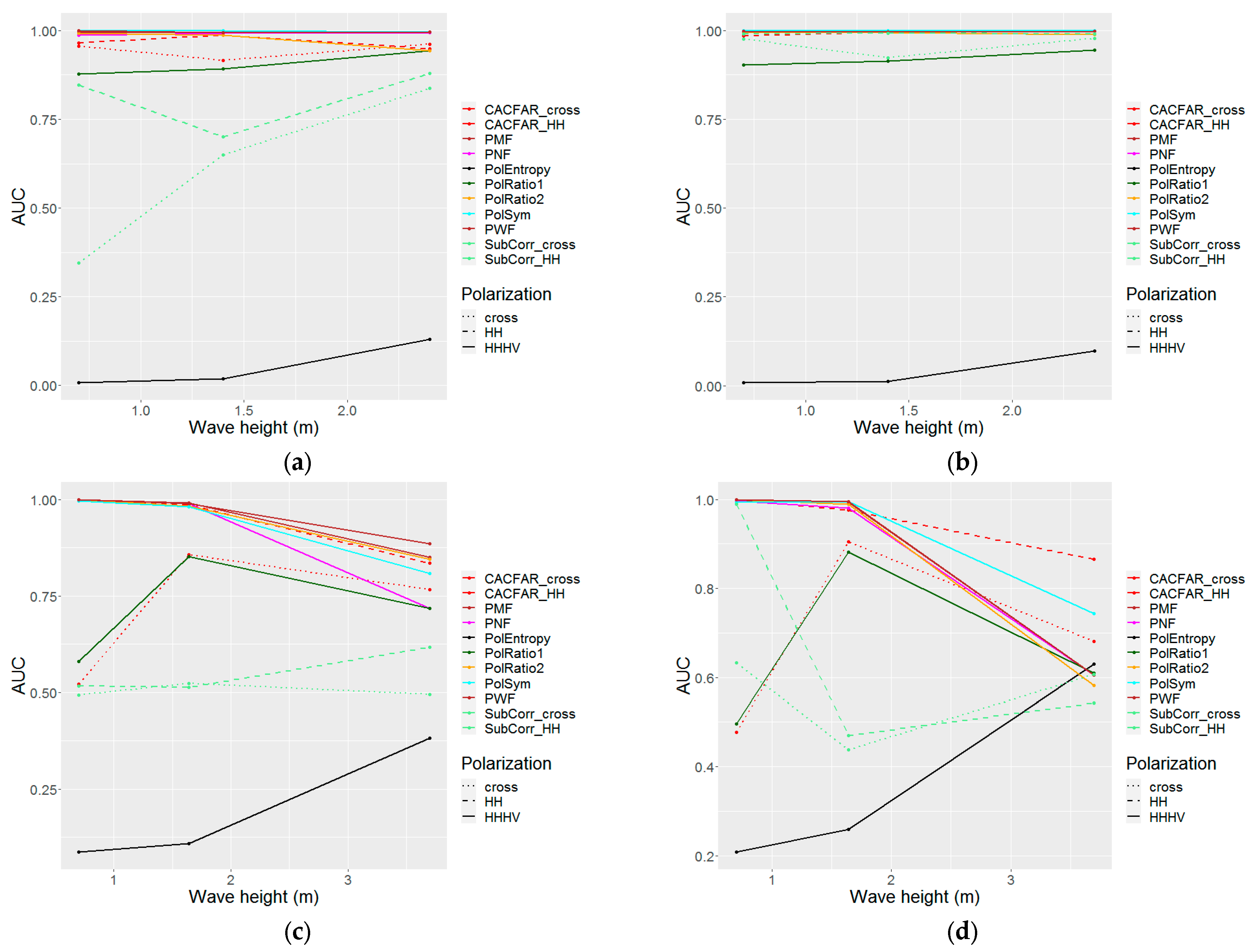
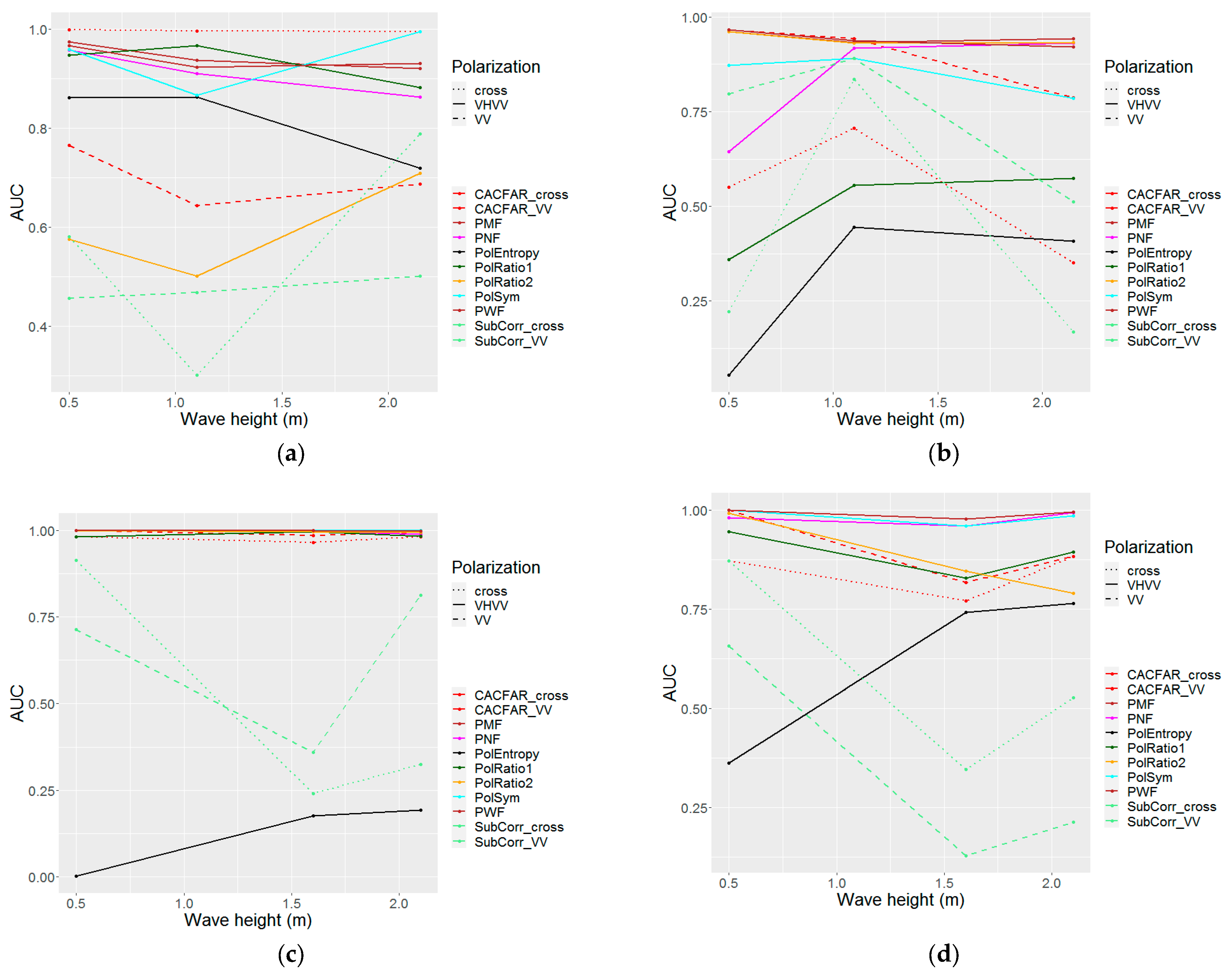
, , , Error in Figure
Error in Table
Reference
- Lanz, P.; Marino, A.; Simpson, M.D.; Brinkhoff, T.; Köster, F.; Möller, M. The InflateSAR Campaign: Developing Refugee Vessel Detection Capabilities with Polarimetric SAR. Remote Sens. 2023, 15, 2008. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarization | HH VV | HV HH | VH VV | |||||
|---|---|---|---|---|---|---|---|---|
| Incidence Angle | Low | Medium | High | Medium | High | Medium | High | Avg |
| PMF | 0.787 | 0.888 | 0.976 | 0.996 | 0.906 | 0.945 | 0.995 | 0.928 |
| PWF | 0.779 | 0.882 | 0.975 | 0.997 | 0.912 | 0.941 | 0.995 | 0.926 |
| PNF | 0.67 | 0.822 | 0.956 | 0.994 | 0.881 | 0.871 | 0.986 | 0.883 |
| PolEntropy | 0.834 | 0.813 | 0.534 | 0.046 | 0.279 | 0.559 | 0.373 | 0.491 |
| PolRatio1/3 | 0.529 | 0.768 | 0.947 | 0.913 | 0.689 | 0.714 | 0.939 | 0.786 |
| PolRatio2/4 | 0.554 | 0.599 | 0.849 | 0.983 | 0.9 | 0.768 | 0.936 | 0.799 |
| SubCorr_HH | 0.565 | 0.688 | 0.744 | 0.9 | 0.608 | 0.701 | ||
| SubCorr_VV | 0.528 | 0.557 | 0.684 | 0.604 | 0.481 | 0.571 | ||
| SubCorr_cross | 0.785 | 0.531 | 0.483 | 0.537 | 0.584 | |||
| CACFAR_HH | 0.6 | 0.775 | 0.975 | 0.98 | 0.943 | 0.854 | ||
| CACFAR_VV | 0.628 | 0.695 | 0.915 | 0.798 | 0.946 | 0.797 | ||
| CACFAR_cross | 0.972 | 0.701 | 0.766 | 0.909 | 0.837 | |||
| PolSym | 0.999 | 0.92 | 0.895 | 0.991 | 0.951 | |||
| avg | 0.647 | 0.749 | 0.856 | 0.869 | 0.752 | 0.759 | 0.826 | |
| Polarization | HH VV | HV HH | VH VV | |||||
|---|---|---|---|---|---|---|---|---|
| Incidence Angle | Low | Medium | High | Medium | High | Medium | High | Avg |
| PMF | 0.787 | 0.843 | 0.935 | 0.728 | 0.945 | 0.848 | ||
| PWF | 0.779 | 0.83 | 0.932 | 0.745 | 0.941 | 0.846 | ||
| PNF | 0.67 | 0.75 | 0.887 | 0.662 | 0.871 | 0.768 | ||
| PolEntropy | 0.834 | 0.804 | 0.9 | 0.506 | 0.559 | 0.721 | ||
| PolRatio1/3 | 0.529 | 0.669 | 0.858 | 0.664 | 0.714 | 0.687 | ||
| PolRatio2/4 | 0.554 | 0.521 | 0.64 | 0.714 | 0.768 | 0.639 | ||
| SubCorr_HH | 0.565 | 0.634 | 0.455 | 0.58 | 0.558 | |||
| SubCorr_VV | 0.528 | 0.494 | 0.468 | 0.604 | 0.523 | |||
| SubCorr_cross | 0.551 | 0.483 | 0.517 | |||||
| CACFAR_HH | 0.6 | 0.666 | 0.931 | 0.85 | 0.762 | |||
| CACFAR_VV | 0.628 | 0.59 | 0.758 | 0.798 | 0.694 | |||
| CACFAR_cross | 0.723 | 0.766 | 0.745 | |||||
| PolSym | 0.776 | 0.895 | 0.835 | |||||
| avg | 0.647 | 0.68 | 0.776 | 0.682 | 0.759 | |||
| Polarization | HH VV | HV HH | VH VV | |||||
|---|---|---|---|---|---|---|---|---|
| Incidence Angle | Low | Medium | High | Medium | High | Medium | High | Avg |
| PMF | 0.23 | −0.07 | −0.01 | 0 | 0.08 | 0 | 0.01 | 0.03 |
| PWF | 0.25 | −0.08 | −0.02 | 0 | 0.09 | 0 | 0.01 | 0.04 |
| PNF | 0.22 | −0.10 | 0.05 | −0.01 | 0.04 | 0.08 | 0.02 | 0.04 |
| PolEntropy | 0.06 | 0.02 | 0.12 | 0.01 | −0.17 | 0.51 | −0.50 | 0.01 |
| PolRatio1/3 | 0 | −0.05 | 0 | −0.02 | 0.05 | 0.44 | 0.1 | 0.07 |
| PolRatio2/4 | 0.22 | −0.01 | −0.05 | −0.02 | 0.09 | −0.35 | 0.12 | 0 |
| SubCorr_HH | 0 | −0.19 | −0.13 | −0.18 | −0.12 | −0.13 | ||
| SubCorr_VV | 0.07 | −0.24 | −0.18 | −0.26 | 0.3 | −0.06 | ||
| SubCorr_cross | −0.35 | −0.06 | 0.15 | −0.09 | −0.09 | |||
| CACFAR_HH | 0.05 | −0.06 | 0.03 | −0.03 | −0.01 | 0 | ||
| CACFAR_VV | 0.22 | −0.01 | 0.03 | −0.20 | 0.09 | 0.03 | ||
| CACFAR_cross | −0.06 | 0.03 | 0.46 | 0.14 | 0.14 | |||
| PolSym | 0 | 0.02 | 0.09 | 0.02 | 0.03 | |||
| avg | 0.13 | −0.08 | −0.02 | −0.06 | 0 | 0.08 | 0.02 | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lanz, P.; Marino, A.; Simpson, M.D.; Brinkhoff, T.; Köster, F.; Möller, M. Correction: Lanz et al. The InflateSAR Campaign: Developing Refugee Vessel Detection Capabilities with Polarimetric SAR. Remote Sens. 2023, 15, 2008. Remote Sens. 2023, 15, 5344. https://doi.org/10.3390/rs15225344
Lanz P, Marino A, Simpson MD, Brinkhoff T, Köster F, Möller M. Correction: Lanz et al. The InflateSAR Campaign: Developing Refugee Vessel Detection Capabilities with Polarimetric SAR. Remote Sens. 2023, 15, 2008. Remote Sensing. 2023; 15(22):5344. https://doi.org/10.3390/rs15225344
Chicago/Turabian StyleLanz, Peter, Armando Marino, Morgan David Simpson, Thomas Brinkhoff, Frank Köster, and Matthias Möller. 2023. "Correction: Lanz et al. The InflateSAR Campaign: Developing Refugee Vessel Detection Capabilities with Polarimetric SAR. Remote Sens. 2023, 15, 2008" Remote Sensing 15, no. 22: 5344. https://doi.org/10.3390/rs15225344