1. Introduction
Through the ray tracing technique, it is possible to establish the travel path of radio waves propagating in an anisotropic and inhomogeneous medium [
1]. When the medium is the terrestrial ionosphere, then we talk about
ionospheric ray tracing. Nevertheless, what do we really mean with the terminology
ionospheric ray tracing.
Since the mid 1950s, a set of differential equations implementing Hamilton’s equations were formulated to analyze the propagation in the ionosphere of electromagnetic waves in the high frequency (HF) band (3–30 MHz) [
2]. These equations cannot be solved analytically; thus, they were reformulated, and their solution was found via numerical integration techniques first by Haselgrove and Haselgrove [
3] and then by Haselgrove [
4]. The solutions of Haselgrove’s equations provide the paths of dominant energy flow, which are referred to as
ionospheric ray tracing.
In other terms, the numerical solution of Haselgrove’s equations allows determining, once the initial point and the azimuth of the ray have been specified, the path of a HF radio wave propagating through the ionosphere from a well specified transmitting point (Tx) to an unknown landing point (Rx), being Tx and Rx any pair of points on the Earth’s surface.
The numerical approach provides a very accurate ionospheric ray tracing when a three-dimensional (3-D) electron density matrix and a geomagnetic field model are considered. In this case, we speak about a 3-D magnetoionic ray tracing. Nevertheless, the numerical ray tracing for the 3-D magnetoionic case requires very high computational costs. This is why simplified software packages, including two-dimensional (2-D) and 3-D numerical ray tracing neglecting geomagnetic field effects, and analytical ray tracings have been developed over the years.
The first codes written for the ionospheric ray tracing computation date back to the 1960s, and they provided just a numerical output with runtimes relatively long [
5,
6,
7]. In particular, it is worth mentioning the numerical ray tracing algorithm developed by Jones [
8], which was improved and modified by Jones and Stephenson [
9], that became one of the best-known numerical ionospheric ray tracing codes readily available to be executed on a computer. Later on, other ray tracing algorithms were developed. Reilly [
10], after a substantial revision of an earlier 3-D ionospheric ray tracing program, investigated the performance of upgraded versions of different numerical integration techniques, comparing measured oblique ionograms with synthetic ones obtained for near-vertical incidence sky wave (NVIS) conditions. In the late 1990s, the numerical Homing Ray Tracing software package developed by Norman et al. [
11] was compared with the Segmented Method for 2-D Analytic Ray Tracing [
12]. The latter, based on the Fully Analytic Ionospheric Model [
13], outputs a reliable ray tracing through complicated horizontal gradients varying with altitude along the ray path direction. Another 2-D numerical ray tracing formulation proposed by Coleman [
14] has been shown to be effective in simulating oblique and backscatter ionograms as well as the output of some ionosondes, supporting Over-The-Horizon Radar (OTHR) operations. Generally speaking, HF direction finding systems (HFDF) can provide valuable information about the angles of arrival of signals of a given frequency; this can be suitably exploited as input by a ray tracing program to determine the signal source (i.e., the transmitting site), once the electron density distribution between the HFDF site and the transmitter is known. To this regard, Huang and Reinisch [
15], based on ionograms and sky-map measurements taken at a HFDF site, reconstructed in real time the 3-D electron density distribution between the HFDF site and the transmitter locations, and then used these data as input for a ray tracing program. So doing, from the measured arrival angles at the HFDF site, footprints for both the ordinary and extraordinary ray tracing in the frequency range 7–11 MHz were found to cluster around the actual position of the transmitter within an error of ≈15–55 km, depending on whether the measured ionospheric tilt is considered. More recently, Haselgrove’s equations were properly optimized and adapted for numerical integration on powerful computers, and corresponding results about ray tracing, ray homing, HF propagation-channel modeling, coordinate registration for OTHR, and the detrimental effects that travelling ionospheric disturbances (TIDs) have on an OTHR system were discussed [
16]. A numerical and stepped ray tracing method, working on the empirical 3-D electron density model TWIM [
17], was developed on the basis of ionospheric radio occultation data, and was successfully evaluated for oblique transmissions comparing synthetic ionograms with measured ones at Chung-Li (24.97°N, 121.19°E) [
18]. The numerical 3-D ray tracing program developed by Jones and Stephenson [
9] was also applied to calculate the ray paths through a polar ionosphere including patches and arcs of enhanced electron density; corresponding simulations showed satisfactory results about the ground coverage for a transmitter located at Cambridge Bay (69.1°N, 105.1°E) [
19].
The Provision of High-frequency Raytracing Laboratory for Propagation studies (PHaRLAP) tool developed by Cervera and Harris [
20] for studying and modelling the propagation of HF radio waves in the Earth’s ionosphere, proved to be effective in reproducing a small and a larger imposed ionospheric tilt, as well as in modeling the signatures of a TID observed on both ordinary and extraordinary traces of synthetic ionograms obtained under NVIS propagation conditions [
20]. PHaRLAP was also used to model the propagation of HF signals in studies turned to the assessment of climatological models to be used for the OTHR [
21], as well as to model the interference environment in the HF band, which is an important factor for both the design and the development of OTHR systems [
22,
23]. A modified version of the Jones and Stephenson [
9] ray tracing code, taking as input different profiles of electron density derived by the International Reference Ionosphere (IRI) model ([
24] and reference therein), was used to simulate the Super Dual Auroral Radar Network (SuperDARN) at African equatorial latitudes [
25]. The corresponding analysis of ray tracing results obtained for an azimuth angle ranging between 1° and 360°, an elevation angle ranging between 1° and 90°, and frequencies equal to 12, 16, 20, and 24 MHz, has shown that ionospheric backscatter, as well as ground scatter, can be achieved by a SuperDARN-type radar at equatorial latitudes, in the east–west azimuthal direction [
26].
When both the Tx and the Rx are known a priori, we talk about a
homing approach. This method consists in sending out signals characterized by a wide range of frequencies (
f), elevation angles (∆), and azimuth angle (α); the arrival point of the ray (characterized by a definite triplet:
f, α, ∆) can be approximated with Rx only whether it is relatively close to the Rx position. How close the landing point is to the receiver is established evaluating whether some logical conditions have been fulfilled. However, as an alternative to the homing method, a form of variational principle could be used as the basis for calculating the ionospheric ray tracing when the landing points are known, as clearly demonstrated by Coleman [
27] for several ionospheric scenarios. The homing method is, at the current time, the main approach to perform a point-to-point ionospheric ray tracing. Strangeways [
28] presented a homing method capable of obtaining a precise bending of the ray paths, their phases and group delays, for both terrestrial HF links and Earth-to-satellite paths, taking into account also the effects of horizontal electron density gradients. Kashcheyev et al. [
29] used a numerical homing ray tracing algorithm to estimate the impact that the second- and third-order ionospheric residuals errors have on the Global Navigation Satellite System (GNSS) positioning. They found that the greatest errors are observed when the ray paths cross the crest of the equatorial ionization anomaly. Abdullah et al. [
30] considered a reference and a mobile station spaced 10 km apart to estimate the ionospheric differential error associated to ray paths of Global Positioning System (GPS) signals using the Jones and Stephenson [
9] 3-D ray tracing program properly modified, and including an accurate homing procedure. They found that the differential delay is of the order of 1–5 cm at low elevation angles for both north–south and east–west directions; an amount that, even if usually neglected by the standard differential GPS method, can be important for improving the positioning results that are obtained by the single-frequency GPS users. We conclude this excursus by saying that the ionospheric ray tracing finds its main applications where a detailed knowledge of the ray path is requested; for instance, when there is a need either to predict operating frequencies or to manage HF radio communications, as well as for experimental studies on OTHR systems, single station location, and HFDF [
31]. The upgrade of a whatever synoptic model with real-time ionospheric data recorded for example by a network of either ground-based ionosondes or GNSS receivers (e.g., [
32,
33,
34,
35,
36,
37,
38] and reference therein), provides a more reliable specification of the ionospheric conditions. This is essential to enhance, through the ray tracing tool, the operation and reliability of sky-wave radio communications and radar systems beyond the line-of-sight, especially in case of Space Weather events.
At the Istituto Nazionale di Geofisica e Vulcanologia, an applicative software tool named IONORT (IONOsperic Ray Tracing) was proposed by Azzarone et al. [
39] and used for more than a decade. Since then, the reliability of IONORT has been tested comparing synthetic and measured oblique ionograms [
40,
41], considering as the ionospheric background that provided by the assimilative ISP (IRI-SIRMUP-PROFILE) regional model [
33,
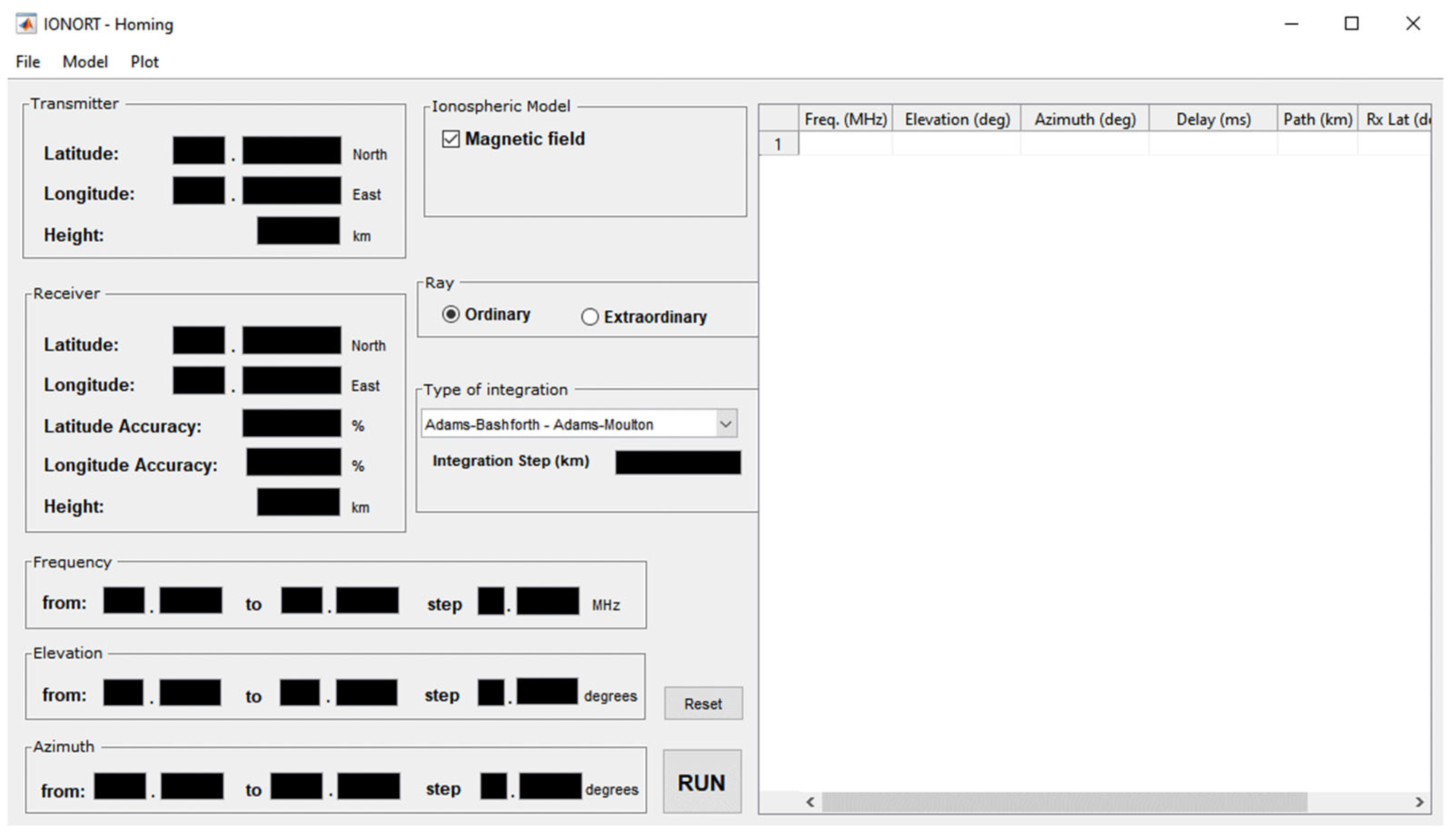
34]. In this paper, after describing the mathematical background behind IONORT, also giving a short overview of the numerical integration methods embedded in the code, we present the main upgrades recently included in IONORT. First of all, the original Fortran 77 source code was completely rewritten in Fortran 90, and carefully debugged. Secondly, the applicability of IONORT has been extended from a regional to a global scale. Finally, we present the new graphical user interfaces (GUIs) of IONORT, including a novel GUI for homing applications.
Section 2 describes the basic mathematical background of the integration computational code of IONORT.
Section 3 discusses the consistency checks of the IONORT integration algorithm.
Section 4 presents and discusses the main upgrades of the IONORT software package.
Section 5 and
Section 6 present and discuss some ray tracing and homing results. Conclusive remarks are the subject of
Section 7.
2. IONORT Mathematical Background
The core of IONORT is based on the versatile computer ray tracing program developed by Jones and Stephenson [
9] to trace the path of radio waves propagating in the ionosphere, that is an anisotropic, dispersive, and varying in time medium, whose index of refraction changes continuously in space. A short description of fundamental mathematical aspects on which the IONORT algorithm is based will be given. This description is, however, not exhaustive, and the most interested reader is referred to the work by Jones and Stephenson [
9] for further information.
Jones and Stephenson [
9] adopted the Haselgrove’s equations [
3,
4] for the development of their 3-D ray tracing computer program. These equations consist of a system of six coupled first-order differential equations with Hamiltonian formalism. For a geocentric spherical coordinate system (
Figure 1), the first-order differential equations system assumes the following form:
where
ρ is the distance between the origin
O of the geocentric reference system and the point
M (see
Figure 1);
θ and
φ are the colatitude and the longitude in spherical polar coordinates, respectively;
kρ,
kθ, and
kφ are the components of the wave vector
k orthogonal to the wave front in the
ρ,
θ, and
φ direction, respectively;
H is the Hamiltonian,
P =
c·t is the group path length, being
c the speed of an electromagnetic wave in the vacuum, and
t the group time delay;
ω = 2π
f is the angular wave frequency, being
f the wave frequency.
The system (1) is the one considered for calculations. Its solution allows determining the coordinates (
ρ,
θ,
φ) reached by the wave vector, its three components (
kρ,
kθ,
kφ), and the group time delay (
t). In (1), the group path
P=
c·t is the independent variable, because the derivatives with respect to
P’ do not depend on the choice of the Hamiltonian function. This is convenient because it allows the ray tracing program taking smaller steps near the reflection point where the calculations are more critical, and a major accuracy is requested [
9]. Since analytical solutions of the system (1) are not possible, numerical solutions are found by means of numerical integration techniques.
2.1. The Hamiltonian
With regard to the choice and calculation of
H some issues arise. In a dissipative medium such as the ionosphere, the dispersion relation is complex, which means that
H is in general complex and consequently the solutions of the system (1), i.e., the coordinates of the ray path are complex. In this case,
H in the reference system of
Figure 1 should be written as:
where
kρ,
kθ,
kφ, and
n are complex quantities.
n2 is the square of the phase refractive index for an electromagnetic wave propagating in a cold magnetized plasma with collisions, which is calculated by the following Appleton–Hartree equation:
being
X = (
fN/
f)
2 where
fN is the plasma frequency,
Z =
ν/
ω where
ν is the electron collision frequency,
YT = (
fH/
f)sin
ψ and
YL = (
fH/
f)cos
ψ, where
fH is the gyrofrequency and
ψ the angle between the normal to the wave front and the geomagnetic field, and i = (−1)
1/2 is the imaginary unit.
Due to the birefringence of the ionospheric plasma, Equation (3) provides two refractive indices:
nord for the ordinary ray and
next for the extraordinary ray, where both of them are complex quantities (being
nord =
µord − i
χord and
next =
µext − i
χext) [
1]. The two refractive indices are obtained from Equation (3) through the choice of either the positive or the negative sign in the denominator, which must be decided applying the so-called Booker’s rule [
42]. Once the Booker’s critical frequency
ωc = (|
e|
B/2
me)sin
2(
ψ)/cos(
ψ) is defined, where
B is the geomagnetic field magnitude,
e is the electron charge, and
me is the electron mass, Booker’s rule states that if
ωc/
ν < 1, to achieve the continuity of
µord and
χord, in Equation (3) the positive sign must be adopted for both
X < 1 and
X > 1, while to achieve the continuity of
µext and
χext, in Equation (3) the negative sign must be adopted for both
X < 1 and
X > 1. Instead, if
ωc/
ν > 1, to achieve the continuity of
µord and
χord, in Equation (3) the positive and the negative sign must be adopted, respectively, for
X < 1 and for
X > 1; while to achieve the continuity of
µext and
χext, in Equation (3) the negative and the positive sign must be adopted, respectively, for
X < 1 and for
X > 1 (e.g., [
43] and reference therein).
The ray tracing in a complex space is necessary when low-frequency radio waves propagate in the ionospheric D layer, where they suffer significant energy losses. In case of HF radio waves, these losses are smaller, and their effect is only an attenuation of the signal. This is why it is desirable that the system (1) have real solutions. This is accomplished by considering
H as:
where the real part of the complex phase refractive index is obtained assuming
ν <<
ω, which means that the electron collision frequency is much smaller than the wave angular frequency. In this case, in Equation (3) the term
Z is negligible. Moreover, by expliciting in Equation (3) the magnetoionic parameters
X,
YT, and
YL, i.e., writing them in terms of the plasma frequency
fN = (
Nee2/4π
2ε0me)
1/2 and the gyrofrequency
fH = |
e|
B/2π
me, the real part of the phase refractive index assumes the following form:
where the signs (+) and (−) are associated to the ordinary and extraordinary propagation mode, respectively;
Ne(
h) is the electron density, which is function of the real height
h, and
ε0 is the dielectric constant in the vacuum.
Equation (5) clearly highlights how a 3-D electron density specification of the ionosphere, as well as an Earth’s magnetic field model, are fundamental elements to obtain accurate ray tracing and homing results in the hypothesis of propagation in a collisionless ionospheric plasma.
Anyway, it must be noted that the Hamiltonian of Equation (4), which is function of the phase refractive index given by Equation (5), cannot be used when a “spitze” phenomenon occurs. This phenomenon consists of a cusp characterizing the ray path at the reflection point. It occurs when the elevation angles of the electromagnetic waves are very large, to such an extent to form a critical angle depending on the propagating wave frequency, the geomagnetic field intensity, and its inclination [
44]. In this case, the phase refractive index, along with some of its derivatives, cannot be determined at the “spitze” and the Hamiltonian of Equation (4) is replaced by another Hamiltonian (see Equation (22) in [
9]) which is not based on the phase refractive index.
2.2. Numerical Integration Methods Embedded in the IONORT Code
Generally, finding an analytical solution of an ordinary first-order differential equation is not always possible and, consequently, it is necessary to rely on numerical integration methods. The purpose of numerical methods is to find an approximate solution for a certain finite time interval. To solve numerically the system (1), the Runge-Kutta (R-K) method of the fourth order (R-K 4) [
45] has been implemented in the IONORT source code, because it provides the best accuracy/computational cost ratio, ensuring an error for each integration step of ≈
o(
h5). Another numerical integration technique that has been implemented in the IONORT source code to solve numerically the system (1) is the Adams–Bashforth (A-B)/Adams–Moulton (A-M) predictor–corrector method, where the four-step A-B 4 method [
46] is the predictor and the three-step A-M 3 method [
47] is the corrector. A-B 4 and A-M 3 form a predictor–corrector pair that is a particular case of a broad category of multistep predictor–corrector methods exploiting the information from the previous steps to obtain a better approximation in the next step.
3. Consistency of the IONORT Integration Algorithm
The group time delay
t is the parameter that usually a ray tracing program outputs when the numerical integration stops, and the ray has reached the ground after being reflected in the ionosphere. In principle, to test the goodness of any ray tracing algorithm,
t could be compared to the group time delay as measured by OTHR applications, synchronized oblique sounding campaigns, or backscattering ionospheric soundings. Unfortunately, these kinds of measurements are uncommon. Nevertheless, taking into account the secant law, and the Breit–Tuve and Martyn propagation equivalent path theorems (e.g., [
31]), an escamotage can be used. To this aim,
Figure 2 shows the oblique path Tx-
Bi-Rx of a HF wave propagating through the ionosphere with a frequency
fob,i, at an elevation angle ∆, reaching the receiver after being reflected at the real height
hi, i.e., at
Bi.
ϕ is the incidence angle of the wave on the ionosphere that, in the approximation of a flat Earth, is simply the complementary angle of ∆. The subscript
i varies from 1 to
N, with
N indicating different oblique frequencies reflected at different heights; consequently, also the apex of the real oblique path (
Bi) and virtual triangular equivalent path (
Ci) will be different, depending on how much the frequency
fob,i penetrates the ionosphere.
The secant law states that fob,i = fv,i secϕi, where fv,i is the frequency that is vertically reflected at the height hi in the middle point of the radio link Tx-Rx.
The Breit–Tuve theorem states that, assuming a monotonic increasing trend of the electron density profile, the group time ti,Tx-Bi-Rx taken by the wave of frequency fob,i in travelling the real oblique path is equal to the time that such wave takes in travelling the virtual triangular equivalent path with speed c, that is ti,Tx-Bi-Rx = ti,Tx-Ci-Rx. Therefore, if N different oblique frequencies (fob,i with i = 1, …, N) are sent out with the same elevation angle ∆, N different real oblique paths and corresponding virtual triangular equivalent paths will be obtained so as to have ti,Tx-Bi-Rx = ti,Tx-Ci-Rx.
This relationship suggests that assuming as real measurements the times ti,Tx-Ci-Rx, we can compare these to the times ti,Tx-Bi-Rx output by IONORT, to evaluate its performance. It is clear that to do this we need to know the position of the various reflectors, which is the height of the virtual reflection points Ci. This is possible thanks to the Martyn’s theorem which establishes that, assuming valid the secant law, the virtual vertical height of reflection h’v,i is equal to the height h’ob,i of the virtual equivalent triangular path for the oblique signal, i.e., h’v,i = h’ob,i.
If a numerical electron density profile
Ne =
Ne (
hi) is known in the middle point of the considered radio link Tx-Rx, and neglecting the geomagnetic field in Equation (5), it is possible to calculate the group refractive index
nG as 1/
n:
the value of
hv,i is then calculated by solving numerically the following integral:
where
hb and
hi are, respectively, the base of the ionosphere and the real height of reflection of the vertical path from which the wave of frequency
fv,i reflects coming back to the ground. In Equation (7),
fv,i is a parameter during the integration; therefore, the knowledge of
Ne allows calculating the heights
hv,i of
N reflectors. Once the values of
hv,i(
fv,i) are known, it is then possible to calculate
ti,Tx-Ci-Rx as follows:
where
D,
RT and ∆ are known.
Specifically, in order to fully test the IONORT algorithm, a numerical 3-D electron density background was considered, and three runs have been carried out, for three different values of ∆: 18°, 30°, and 45°. For each run, IONORT takes as input parameters values of fob,i ranging between 3 and 30 MHz. In this way, three different datasets of IONORT times are obtained. Subsequently, each dataset was compared with the corresponding one calculated through Equation (8). According to the Breit–Tuve theorem, datasets corresponding to the same elevation angle should be equal. As a consequence, the following comparison ti,Tx-Bi-Rx vs. ti,Tx-Ci-Rx has been carried out for each of the three chosen elevation angles.
An example of this analysis is shown in
Figure 3 for ∆ = 30°, where the percentage relative error:
is also reported.
The trend of Δti given by Equation (9) represents the performance of the IONORT algorithm, and shows that for low frequencies, from 3 to about 12 MHz, the percentage relative error is below 1%. Smaller errors at lower frequencies are those related to waves travelling for relatively short paths; in this case, the Earth’s curvature can be neglected and the approximation of flat ionospheric layers is more appropriate, leading to a reduction in the error that can be ascribed only to the integration procedure used by IONORT. The errors increase when getting closer to the maximum of electron density and then decrease again showing a fluctuating trend that practically does not ever exceed 3%.
The outcome of
Figure 3 holds also for elevation angles equal to 18° and 45°, for which the results are not shown here. The interested reader can refer to the work by Bianchi et al. [
48] where additional details about this issue can be found.
5. The Ray Tracing Feature: Some Results
In this section, two ray tracing cases obtained by placing the transmitter at high and middle latitude in the Northern hemisphere will be shown. The electron density background will be that provided by the IRI model [
24], based on both the 12-month smoothed ionospheric index (
IG12) [
49] and the 12-month smoothed sunspot number index (
R12) [
50,
51]. The ray tracing simulations have been performed using as integration method that of A-B/A-M, setting the ordinary (O) mode of propagation, and considering as geomagnetic field model the International Geomagnetic Reference Field (IGRF-13) [
52]. To highlight the global potentialities of IONORT, additional examples can be found in the
Supplementary Material.
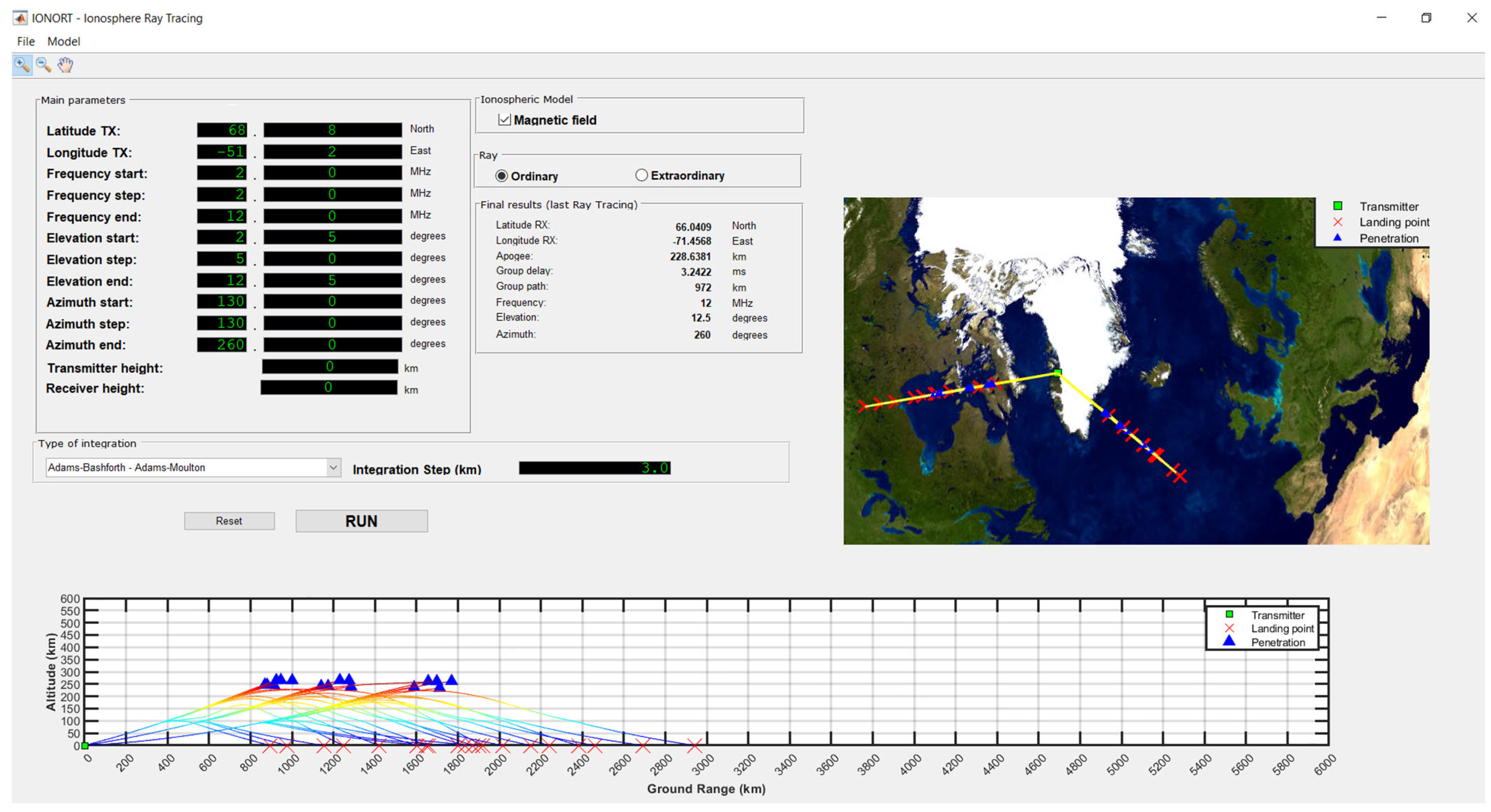
Figure 7 shows the ray tracing results for the O propagation mode for the epoch 6 January 2022 at 09:00 UT, simulating a transmitter positioned at Qasigiannguit (68.8°N, 51.2°W, Greenland), and setting loop cycles in frequency from 2 to 12 MHz (with a step of 2 MHz), and in elevation angle from 2.5° to 12.5° (with a step of 5°). Two values of the azimuth angle equal to 130° and 260° have been considered. For α = 130° the minimum length path (≈992 km, group delay ≈ 3.3112 ms) occurs for
f = 2 MHz and ∆ = 7.5°, while the maximum length path (≈2448 km, group delay ≈ 8.1672 ms) occurs for
f = 8 MHz and ∆ = 2.5°. For α = 260° the minimum length path (≈917 km, group delay ≈ 3.0685 ms) occurs for
f = 2 MHz and ∆ = 12.5°, while the maximum length path (≈3013 km, group delay ≈ 10.0525 ms) occurs for
f = 8 MHz and ∆ = 2.5°.
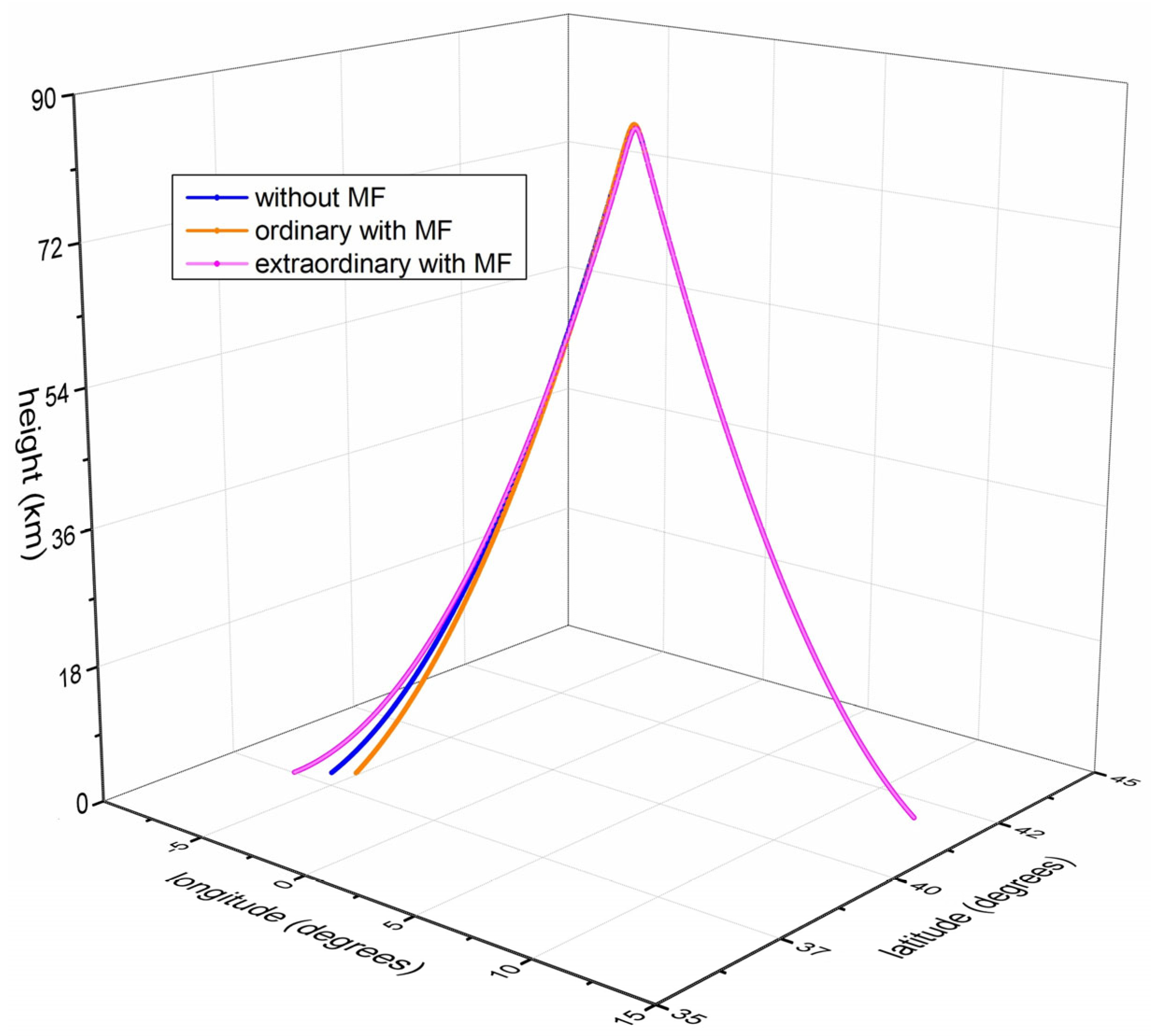
The same settings used to obtain the results shown in
Figure 7 for the O propagation mode, were used to run IONORT for both the extraordinary (X) propagation mode and without including the geomagnetic field. The corresponding results are not shown here. Nevertheless, an example of the obtained ray paths for the O and X modes, as well as in absence of the geomagnetic field, are shown in
Figure 8 for
f = 6 MHz, ∆ = 12.5° and α = 130°.
In addition, the azimuthal displacement due to the anisotropy introduced by the presence of the Earth’s magnetic field has been calculated also for some of ray tracings drawn in the 2-D plot shown in
Figure 7. Corresponding results are shown in
Table 1, where α
start is the initial azimuth angle given as input through the GUI.
Figure 9 shows the ray tracing results for the O propagation mode for the epoch 24 May 2022 at 15:00 UT simulating a transmitter positioned in Rome (41.9°N, 12.5°E; Italy), with the same loop cycles of
Figure 7. Azimuth angles equal to 110° and 260° have been chosen. For α = 110° the minimum length path (≈729 km, group delay ≈ 2.4319 ms) occurs for
f = 2 MHz and ∆ = 12.5°, while the maximum length path (≈2054 km, group delay ≈ 6.8546 ms) occurs for
f = 12 MHz and ∆ = 12.5°. For α = 260° the minimum length path (≈728 km, group delay ≈ 2.4293 ms) occurs for
f = 2 MHz and ∆ = 12.5°, while the maximum length path (≈1768 km, group delay ≈ 5.9003 ms) occurs for
f = 12 MHz and ∆ = 2.5°.
As carried out for the previous epoch, also in this case the same settings used to obtain the results shown in
Figure 9 for the O mode of propagation, were used to run IONORT for both the X propagation mode and without including the geomagnetic field. An example of the obtained ray paths calculated for the O and X modes, as well as in absence of the geomagnetic field, are shown in
Figure 10 for
f = 2 MHz, ∆ = 2.5 °, and α = 260°.
In addition, the azimuthal displacement due to the anysotropy introduced by the presence of the Earth’s magnetic field has been calculated also for some of ray tracings drawn in the 2-D plot shown in
Figure 9. Corresponding results are shown in
Table 2, where α
start is the initial azimuth angle given as input through the GUI.
Comparing
Table 1 with
Table 2 it is clear how the effect of the geomagnetic field is more important at high latitudes than at middle latitudes. A larger value of the geomagnetic field at high latitudes causes a larger azimuthal displacement of the plane of propagation than at middle latitudes.
6. The Homing Feature: Some Results
In this section, two homing cases obtained by placing the transmitter and the receiver both in the Northern Europe and Middle East will be shown. As it was carried out in the previous section, the electron density background will be that output by the IRI model [
24]. The homing simulations will be performed using as integration method the A-B/A-M, setting both modes of propagation, O and X, and considering as geomagnetic field model the International Geomagnetic Reference Field (IGRF-13) [
52]. Moreover, different loop cycles in frequency, elevation angle, and azimuth angle are tried to find the “winner triplets”, namely those combinations of (
f, ∆, α) that allow the homing. The synthetic oblique ionograms resulting from the homing will be shown superimposed to the list of the “winner triplets”. To highlight the global potentialities of IONORT, additional examples can be found in the
Supplementary Material.
Figure 11 shows the homing result obtained for the epoch 9 August 2022 at 23:00 UT, for the O mode, simulating a transmitter located in London (51.5°N, 359.8°E; England) and a receiver located in Stockholm (59.3°N, 18.0°E; Sweden). The corresponding oblique ionogram shows a Maximum Usable Frequency (MUF) for the simulated radio link (ground range ≈ 1433 km) of 8.7 MHz.
Figure 12 shows the homing result for the same radio link considered in
Figure 11, for the X propagation mode. The corresponding oblique ionogram shows that the MUF is now 9.3 MHz.
In
Figure 13 the O and X trace have been plotted together to better visualize their differences.
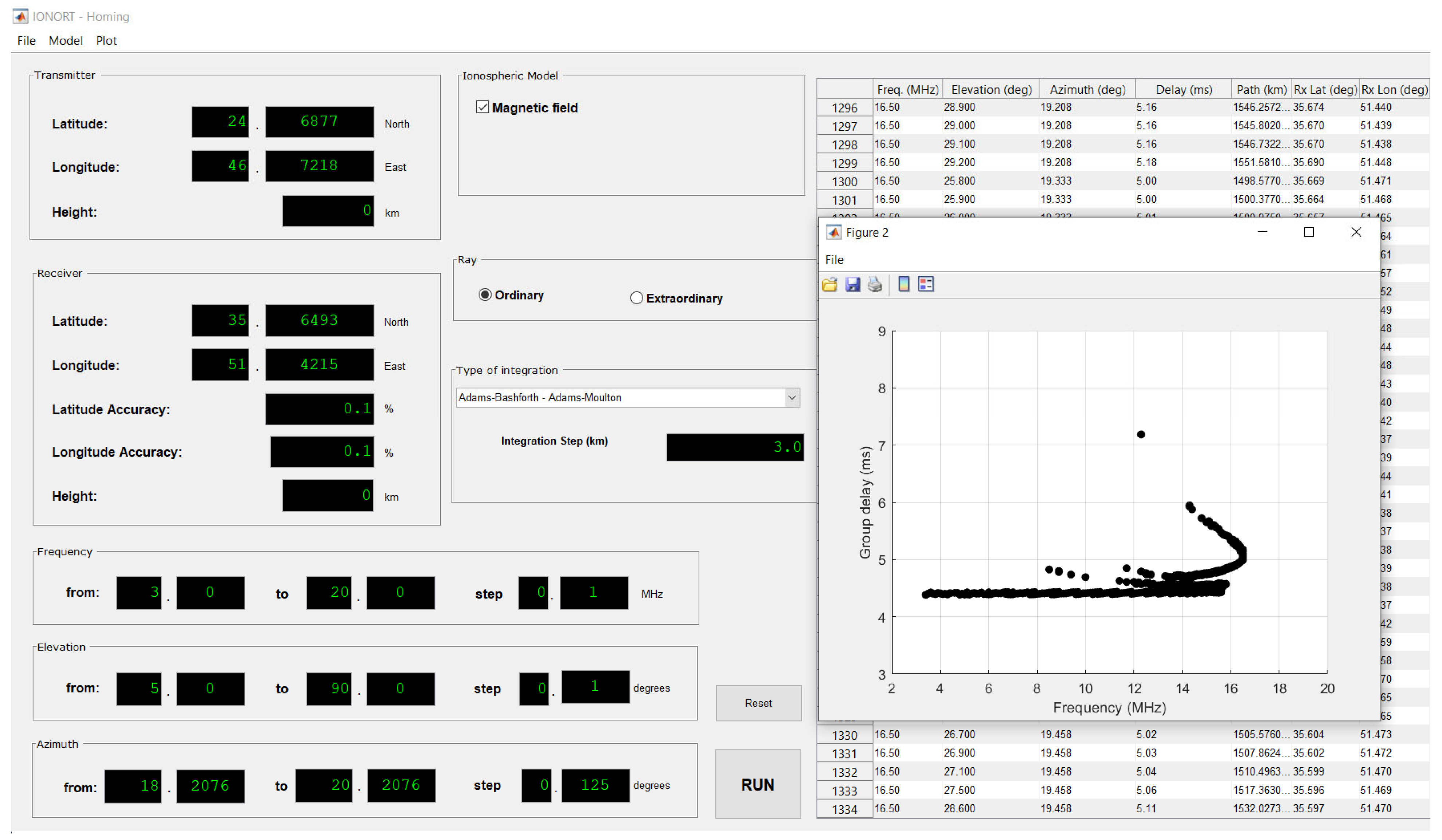
Figure 14 shows the homing result obtained for the epoch 29 July 2022 at 09:00 UT, for the O mode, simulating a transmitter located in Ryadh (24.6°N, 46.7°E; Saudi Arabia) and a receiver located at Teheran (35.6°N, 51.4°E; Iran). The oblique ionogram corresponding to the simulated radio link (ground range ≈ 1294 km) is constituted by two well distinct traces: the lower trace is related to the F1-layer, characterized by a MUF of about 16.0 MHz; the upper trace is related to the F2-layer, characterized by a MUF of 16.5 MHz.
Figure 15 shows the homing result for the same radio link considered in
Figure 14, for the X propagation mode. The corresponding oblique ionogram shows a lower trace related to the F1-layer, characterized by a MUF slightly larger than 16.0 MHz, and an upper trace, related to the F2-layer, showing a MUF of 16.8 MHz.
As it was carried out for the previous case, in
Figure 16 the O and X trace have been plotted together to better visualize their differences.
Comparing
Figure 13 with
Figure 16 it is clear how a larger value of the geomagnetic field at higher latitudes causes a larger difference between the O and X MUF values.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}