
Application of Sparse Regularization in Spherical Radial Basis Functions-Based Regional Geoid Modeling in Colorado

Abstract
:1. Introduction
2. Method
2.1. Spherical Radial Basis Function Model
2.2. Parameter Estimation
2.3. Regularization Parameter Selection
2.4. Covariance Matrix of the Estimated Parameters
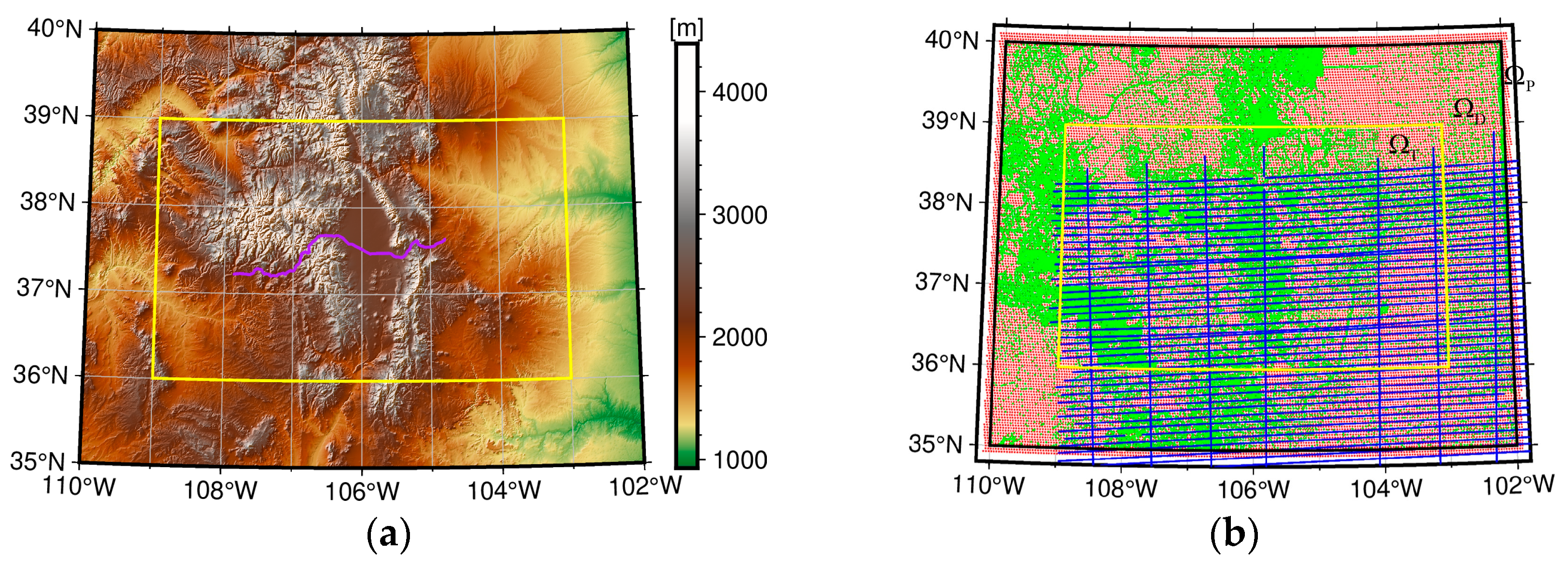
3. Data and Study Area
3.1. Terrestrial and Airborne Gravity Data
3.2. Data Preprocessing
4. Experiment Settings
4.1. Remove–Compute–Restore Technique
4.2. Maximum Degree of Expansion
4.3. Types of the SRBFs
4.4. Defining the Target, Data, and Parameterization Area
4.5. Locations of the SRBFs
4.6. Weight Matrix of Observations
4.7. Computation of the Disturbing Potential Functionals
5. Results
5.1. The Estimated Parameters
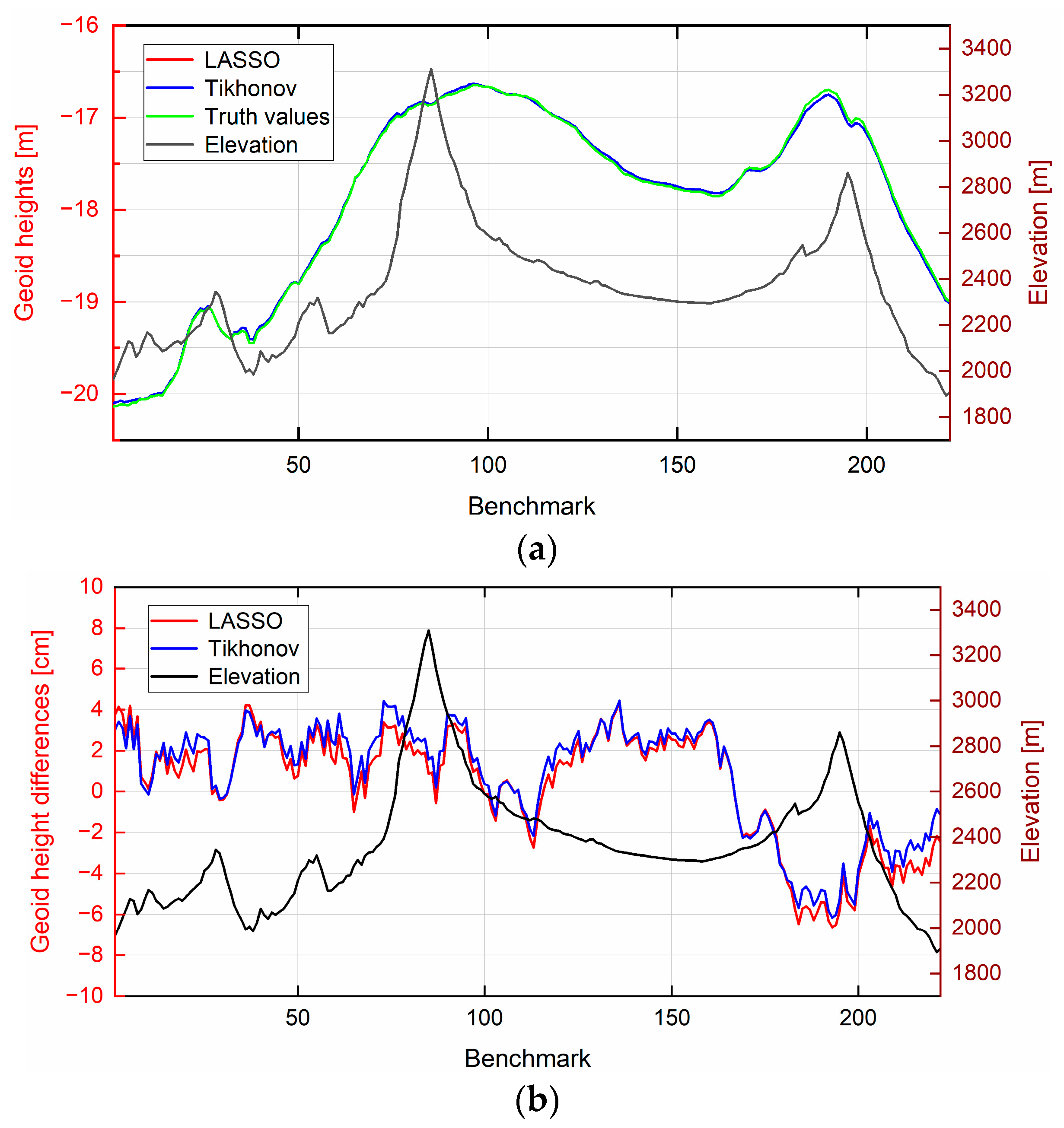
5.2. GPS/Leveling Comparisons
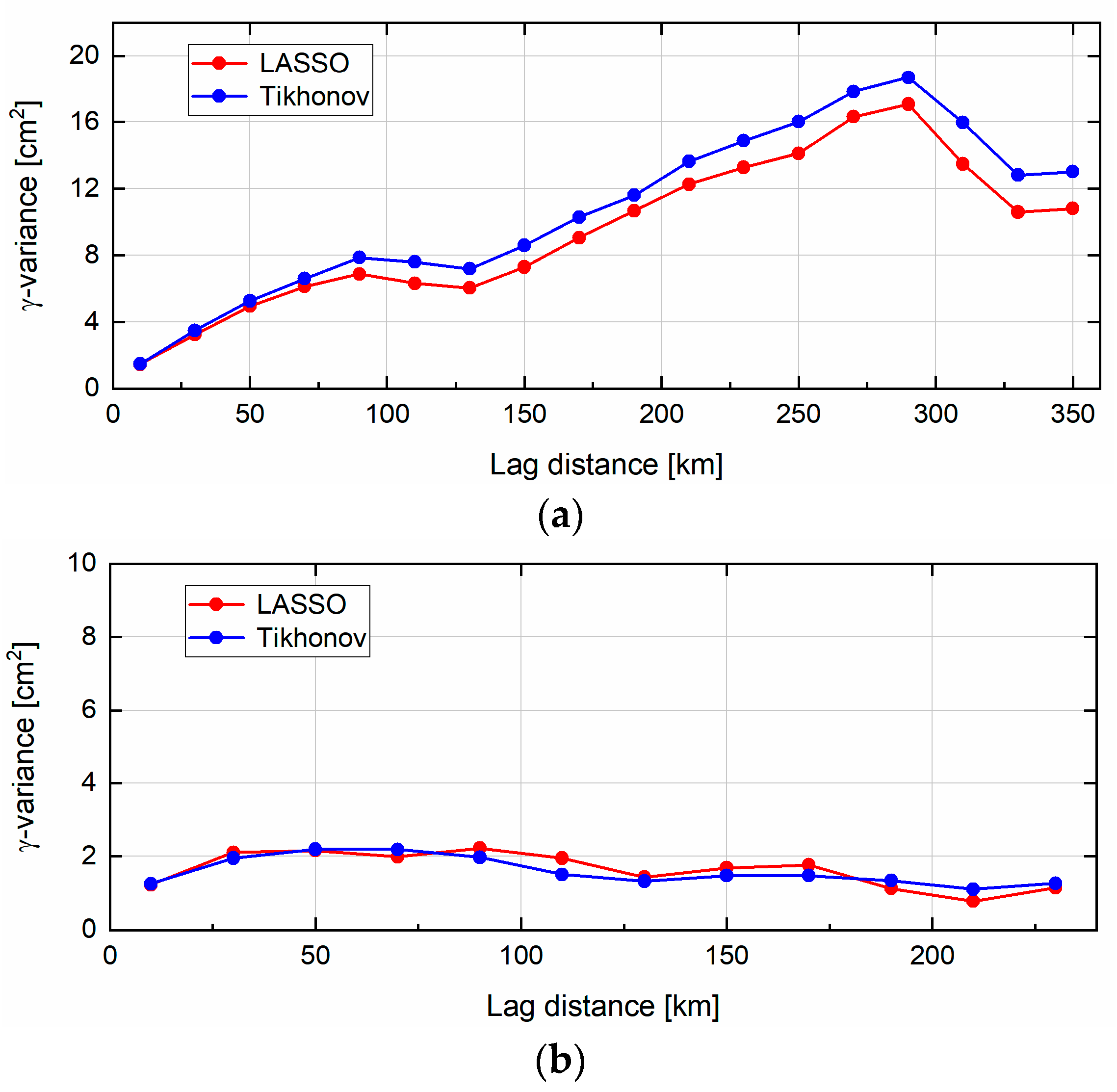
5.3. Variogram Analysis of the Differences
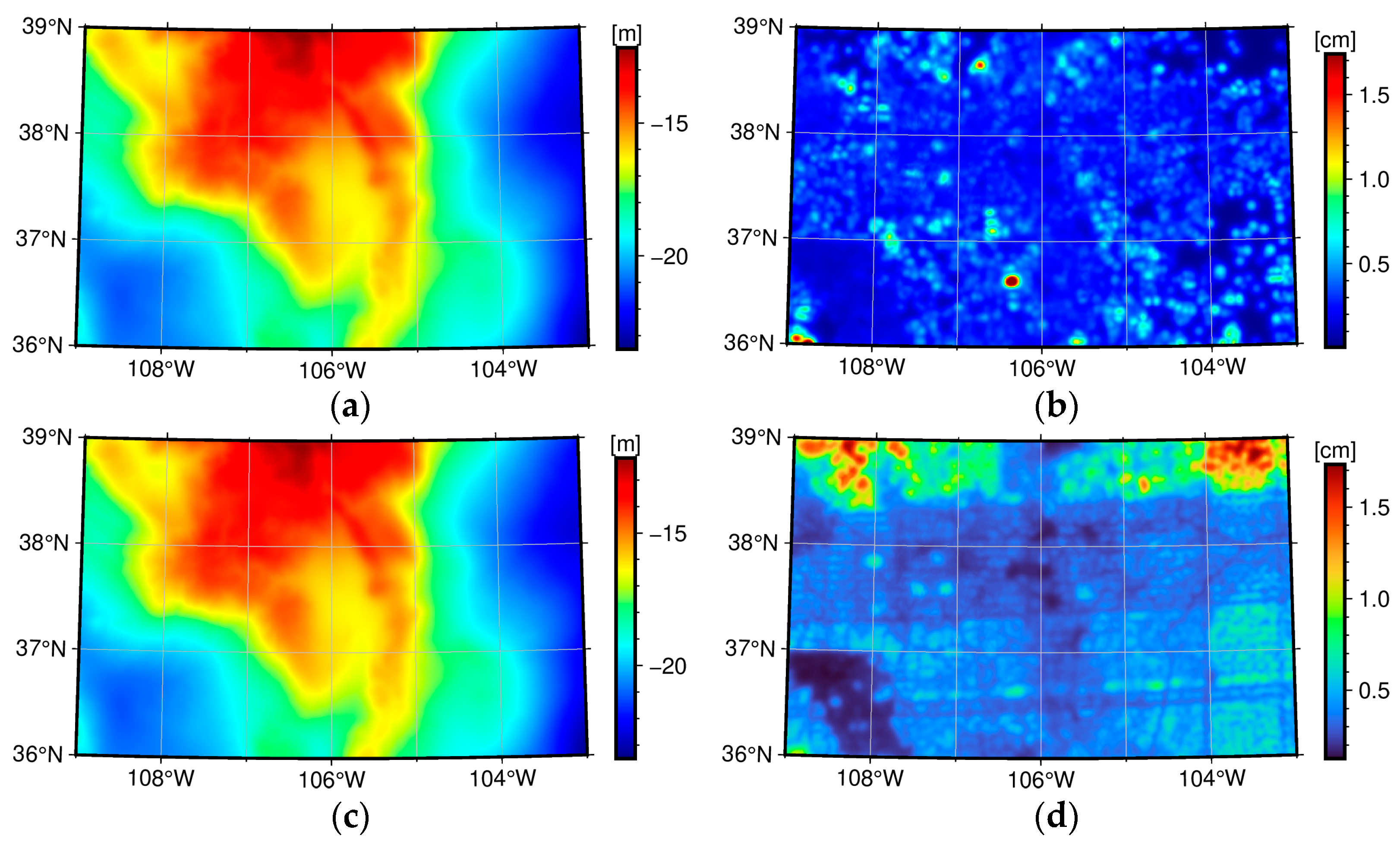
5.4. Area Comparison of Quasigeoid Model (Grids of )
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Torge, W. Geodesy; Walter de Gruyter: Berlin, Germany, 2001. [Google Scholar]
- Vaníček, P.; Krakiwsky, E.J. Geodesy; Elsevier Science Publishers: New York, NY, USA, 1987. [Google Scholar]
- Hofmann-Wellenhof, B.; Moritz, H. Physical Geodesy; Springer: Wien, Austria, 2006. [Google Scholar]
- Li, X.P. Using radial basis functions in airborne gravimetry for local geoid improvement. J. Geod. 2018, 92, 471–485. [Google Scholar] [CrossRef]
- Simons, F.J.; Dahlen, F.A.; Wieczorek, M.A. Spatiospectral concentration on a sphere. SIAM Rev. 2006, 48, 504–536. [Google Scholar] [CrossRef]
- Eicker, A. Gravity Field Refinement by Radial Basis Functions from In-Situ Satellite Data. Ph.D. Thesis, Bonn University, Bonn, Germany, 2008. [Google Scholar]
- Wittwer. Regional Gravity Field Modelling with Radial Basis Functions. Ph.D. Thesis, Delft University of Technology, Delft, The Nederland, 2009. [Google Scholar]
- Bucha, B.; Bezdek, A.; Sebera, J.; Janak, J. Global and Regional Gravity Field Determination from GOCE Kinematic Orbit by Means of Spherical Radial Basis Functions. Surv. Geophys. 2015, 36, 773–801. [Google Scholar] [CrossRef]
- Schmidt, M.; Fengler, M.; Mayer-Gurr, T.; Eicker, A.; Kusche, J.; Sanchez, L.; Han, S.C. Regional gravity modeling in terms of spherical base functions. J. Geod. 2007, 81, 17–38. [Google Scholar] [CrossRef]
- Klees, R.; Liu, X.; Wittwer, T.; Gunter, B.C.; Revtova, E.A.; Tenzer, R.; Ditmar, P.; Winsemius, H.C.; Savenije, H.H.G. A Comparison of Global and Regional GRACE Models for Land Hydrology. Surv. Geophys. 2008, 29, 335–359. [Google Scholar] [CrossRef]
- Klees, R.; Tenzer, R.; Prutkin, I.; Wittwer, T. A data-driven approach to local gravity field modelling using spherical radial basis functions. J. Geod. 2008, 82, 457–471. [Google Scholar] [CrossRef]
- Tenzer, R.; Klees, R. The choice of the spherical radial basis functions in local gravity field modeling. Stud. Geophys. Geod. 2008, 52, 287–304. [Google Scholar] [CrossRef]
- Panet, I.; Kuroishi, Y.; Holschneider, M. Wavelet modelling of the gravity field by domain decomposition methods: An example over Japan. Geophys. J. Int. 2011, 184, 203–219. [Google Scholar] [CrossRef]
- Bentel, K.; Schmidt, M.; Gerlach, C. Different radial basis functions and their applicability for regional gravity field representation on the sphere. GEM-Int. J. Geomath. 2013, 4, 67–96. [Google Scholar] [CrossRef]
- Naeimi, M. Inversion of Satellite Gravity Data Using Spherical Radial Base Functions. Ph.D. Thesis, Leibniz Universität Hannover, Hanover, Germany, 2013. [Google Scholar]
- Naeimi, M.; Flury, J.; Brieden, P. On the regularization of regional gravity field solutions in spherical radial base functions. Geophys. J. Int. 2015, 202, 1041–1053. [Google Scholar] [CrossRef]
- Foroughi, I.; Safari, A.; Novák, P.; Santos, M.C. Application of radial basis functions for height datum unification. Geosciences 2018, 8, 369. [Google Scholar] [CrossRef]
- Wu, Y.H.; Luo, Z.C.; Zhong, B.; Xu, C. A multilayer approach and its application to model a local gravimetric quasi-geoid model over the North Sea: QGNSea V1.0. Geosci. Model Dev. 2018, 11, 4797–4815. [Google Scholar] [CrossRef]
- Klees, R.; Slobbe, D.C.; Farahani, H.H. How to deal with the high condition number of the noise covariance matrix of gravity field functionals synthesised from a satellite-only global gravity field model? J. Geod. 2019, 93, 29–44. [Google Scholar] [CrossRef] [PubMed]
- Lin, M. Regional Gravity Field Recovery Using the Point Mass Method. Ph.D. Thesis, University of Hannover, Hanover, Germany, 2015. [Google Scholar]
- Lieb, V. Enhanced Regional Gravity Field Modeling from the Combination of Real Data via MRR. Ph.D. Thesis, Technischen Universität München, Munich, Germany, 2017. [Google Scholar]
- Wu, Y. Regional Gravity Field Modeling from Heterogeneous Data Sets by Using Poisson Wavelets Radial Basis Functions. Ph.D. Thesis, Wuhan University, Wuhan, China, 2016. [Google Scholar]
- Bentel, K.; Schmidt, M.; Rolstad Denby, C. Artifacts in regional gravity representations with spherical radial basis functions. J. Geod. Sci. 2013, 3, 173–187. [Google Scholar] [CrossRef]
- Lin, M.; Denker, H.; Muller, J. A comparison of fixed- and free-positioned point mass methods for regional gravity field modeling. J. Geodyn. 2019, 125, 32–47. [Google Scholar] [CrossRef]
- Schneider, N.; Michel, V. A dictionary learning add-on for spherical downward continuation. J. Geod. 2022, 96, 21. [Google Scholar] [CrossRef]
- Koch, K.R.; Kusche, J. Regularization of geopotential determination from satellite data by variance components. J. Geod. 2002, 76, 259–268. [Google Scholar] [CrossRef]
- Kusche, J.; Klees, R. Regularization of gravity field estimation from satellite gravity gradients. J. Geod. 2002, 76, 359–368. [Google Scholar] [CrossRef]
- Xu, P.L.; Fukuda, Y.; Liu, Y.M. Multiple parameter regularization: Numerical solutions and applications to the determination of geopotential from precise satellite orbits. J. Geod. 2006, 80, 17–27. [Google Scholar] [CrossRef]
- Xu, P.L.; Shen, Y.Z.; Fukuda, Y.; Liu, Y.M. Variance component estimation in linear inverse ill-posed models. J. Geod. 2006, 80, 69–81. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems; John Wiley & Sons: New York, NY, USA, 1977. [Google Scholar]
- Koch, K.R. Parameter Estimation and Hypothesis Testing in Linear Models; Springer: Berlin, Germany, 1999. [Google Scholar]
- Teunissen, P.J.G. Adjustment Theory: An Introduction; Delft University Press: Delft, The Nederlandse, 2000. [Google Scholar]
- Tibshirani, R. Regression shrinkage and selection via the lasso. J. R. Stat. Soc. Ser. B (Methodol.) 1996, 58, 267–288. [Google Scholar] [CrossRef]
- Wright, S.J.; Nowak, R.D.; Figueiredo, M.A.T. Sparse Reconstruction by Separable Approximation. IEEE Trans. Signal Process 2009, 57, 2479–2493. [Google Scholar] [CrossRef]
- Fan, J.; Li, R. Variable Selection via Nonconcave Penalized Likelihood and its Oracle Properties. J. Am. Stat. Assoc. 2001, 96, 1348–1360. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Wainwright, M. Statistical Learning with Sparsity: The Lasso and Generalizations; CRC Press: London, UK, 2015. [Google Scholar]
- Barthelmes, F. Untersuchungen zur Approximation des Äußeren Gravitationsfeldes der Erde Durch Punktmassen Mit Optimierten Positionen; Zentralinstituts für Physik der Erde: Potsdam, Germany, 1986; Volume 92. [Google Scholar]
- Lehmann, R. The method of free-positioned point masses-geoid studies on the Gulf of Bothnia. Bull. Géodésique 1993, 67, 31–40. [Google Scholar] [CrossRef]
- Lin, M.; Denker, H.; Muller, J. Regional gravity field modeling using free-positioned point masses. Stud. Geophys. Geod. 2014, 58, 207–226. [Google Scholar] [CrossRef]
- Antunes, C.; Pail, R.; Catalao, J. Point mass method applied to the regional gravimetric determination of the geoid. Stud. Geophys. Geod. 2003, 47, 495–509. [Google Scholar] [CrossRef]
- Schall, J. Optimization of Point Grids in Regional Satellite Gravity Analysis Using a Bayesian Approach. Ph.D. Thesis, Bonn University, Bonn, Germany, 2019. [Google Scholar]
- Yu, H.; Chang, G.; Zhang, S.; Qian, N. Sparsifying spherical radial basis functions based regional gravity models. J. Spat. Sci. 2022, 67, 297–312. [Google Scholar] [CrossRef]
- Wang, Y.M.; Sanchez, L.; Agren, J.; Huang, J.L.; Forsberg, R.; Abd-Elmotaal, H.A.; Ahlgren, K.; Barzaghi, R.; Basic, T.; Carrion, D.; et al. Colorado geoid computation experiment: Overview and summary. J. Geod. 2021, 95, 127. [Google Scholar] [CrossRef]
- Krarup, T. A contribution to the mathematical foundation of physical geodesy. In Mathematical Foundation of Geodesy, 1st ed.; Borre, K., Ed.; Springer: Berlin, Germany, 2006; Volume 4, pp. 29–90. [Google Scholar]
- Heiskanen, W.A.; Moritz, H. Physical Geodesy; W.H. Freeman and Company: San Francisco, CA, USA, 1967. [Google Scholar]
- Sansò, F.; Sideris, M.G. Geoid Determination; Springer: Berlin, Germany, 2013. [Google Scholar]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Oldenburg, D.; Scheuer, T.; Levy, S. Recovery of the acoustic impedance from reflection seismograms. Geophysics 1983, 48, 1318–1337. [Google Scholar] [CrossRef]
- Santosa, F.; Symes, W.W. Linear Inversion of Band-Limited Reflection Seismograms. SIAM J. Sci. Comput. 1986, 7, 1307–1330. [Google Scholar] [CrossRef]
- Daubechies, I.; DeVore, R.; Fornasier, M.; Güntürk, C.S.n. Iteratively reweighted least squares minimization for sparse recovery. Commun. Pure Appl. Math. 2010, 63, 1–38. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imag. Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Wahba, G. A survey of some smoothing problems and the methods of generalized cross-validation for solving them. In Proceedings of the Applications of Statistics, Dayton, OH, USA, 14–18 June 1976. [Google Scholar]
- Akaike, H. Likelihood and the Bayes procedure. Trab. Estad. Investig. Oper. 1980, 31, 143–166. [Google Scholar] [CrossRef]
- Hansen, P.; O’leary, D. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Zou, H.; Hastie, T.; Tibshirani, R. On the “degrees of freedom” of the lasso. Ann. Stat. 2007, 35, 2173–2192. [Google Scholar] [CrossRef]
- Chang, G.; Qian, N.; Chen, C.; Gao, J. Precise instantaneous velocimetry and accelerometry with a stand-alone GNSS receiver based on sparse kernel learning. Measurement 2020, 159, 107803. [Google Scholar] [CrossRef]
- Qian, N.J.; Chang, G.B.; Ditmar, P.; Gao, J.X.; Wei, Z.Q. Sparse DDK: A Data-Driven Decorrelation Filter for GRACE Level-2 Products. Remote Sens. 2022, 14, 2810. [Google Scholar] [CrossRef]
- Saleh, J.; Li, X.; Wang, Y.M.; Roman, D.R.; Smith, D.A. Error analysis of the NGS’ surface gravity database. J. Geod. 2013, 87, 203–221. [Google Scholar] [CrossRef]
- GRAV-D Science Team. Block MS05 (Mountain South 05). GRAV-D Airborne Gravity Data User Manual. 2018. Available online: https://www.ngs.noaa.gov/GRAV-D/data_ms05.shtml (accessed on 25 May 2021).
- Zhong, D.; Damiani, T.M.; Preaux, S.A.M.; Kingdon, R.W. Comparison of airborne gravity processing results by GravPRO and Newton software packages. Geophysics 2015, 80, G107–G118. [Google Scholar] [CrossRef]
- Huang, J.; Holmes, S.A.; Zhong, D.; Véronneau, M.; Wang, Y.M.; Crowley, J.W.; Li, X.P.; Forsberg, R. Analysis of the grav-d airborne gravity data for geoid modelling. In International Symposium on Gravity, Geoid and Height Systems 2016, International Association of Geodesy Symposia; Vergos, G.S., Pail, R., Barzaghi, R., Eds.; Springer: Cham, Switzerland, 2017; Volume 148, pp. 61–77. [Google Scholar] [CrossRef]
- Survey, N. EGM2008 Homepage. 2016. Available online: https://earth-info.nga.mil/GandG/wgs84/gravitymod/egm2008/egm08_wgs84.html (accessed on 12 February 2022).
- Willberg, M.; Zingerle, P.; Pail, R. Integration of airborne gravimetry data filtering into residual least-squares collocation: Example from the 1 cm geoid experiment. J. Geod. 2020, 94, 75. [Google Scholar] [CrossRef]
- Işık, M.S.; Erol, B.; Erol, S.; Sakil, F.F. High-resolution geoid modeling using least squares modifcation of Stokes and Hotine formulas in Colorado. J. Geod. 2021, 95, 49. [Google Scholar] [CrossRef]
- Wenzel, H. Hochauflösende Kugelfunktionsmodelle für das Gravitationspotential der Erde; Wissenschaftliche Arbeiten der Fachrichtung Vermessungswesen der Universität Hannover; Universität Hannover: Hanover, Germany, 1985; Volume 137, pp. 1–154. [Google Scholar]
- Sánchez, L.; Ågren, J.; Huang, J.; Wang, Y.M.; Forsberg, R.R. Basic Agreements for the Computation of Station Potential Values as IHRS Coordinates within Empirical Experiments Based on Data Provided by the IAG JWG 2.2.2 (the 1 cm Geoid Experiment). 2018. Available online: https://www.isgeoid.polimi.it/Geoid/America/USA/IHRF_Basic_req-_V0.3_Feb19_2018.pdf (accessed on 28 April 2022).
- Forsberg, R.; Tscherning, C.C. The use of height data in gravity field approximation by collocation. J. Geophys. Res. Solid Earth 1981, 86, 7843–7854. [Google Scholar] [CrossRef]
- Liu, Q.; Schmidt, M.; Sanchez, L.; Willberg, M. Regional gravity field refinement for (quasi-) geoid determination based on spherical radial basis functions in Colorado. J. Geod. 2020, 94, 99. [Google Scholar] [CrossRef]
- Pail, R.; Fecher, T.; Barnes, D.; Factor, J.F.; Holmes, S.A.; Gruber, T.; Zingerle, P. Short note: The experimental geopotential model XGM2016. J. Geod. 2018, 92, 443–451. [Google Scholar] [CrossRef]
- Rexer, M.; Hirt, C.; Claessens, S.; Tenzer, R. Layer-Based Modelling of the Earth’s Gravitational Potential up to 10-km Scale in Spherical Harmonics in Spherical and Ellipsoidal Approximation. Surv. Geophys. 2016, 37, 1035–1074. [Google Scholar] [CrossRef]
- Hirt, C.; Kuhn, M.; Claessens, S.; Pail, R.; Seitz, K.; Gruber, T. Study of the Earth’s short-scale gravity field using the ERTM2160 gravity model. Comput. Geosci. 2014, 73, 71–80. [Google Scholar] [CrossRef]
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-Filled SRTM for the Globe: Version 4. Available from the CGIAR-CSI SRTM 90m Database. 2008. Available online: http://srtm.csi.cgiar.org (accessed on 5 April 2022).
- Lieb, V.; Schmidt, M.; Dettmering, D.; Boerger, K. Combination of various observation techniques for regional modeling of the gravity field. J. Geophys. Res. Solid Earth 2016, 121, 3825–3845. [Google Scholar] [CrossRef]
- Freeden, W.; Gervens, T.; Schreiner, M. Constructive Approximation on the Sphere with Applications to Geomathematics; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Reuter, R. Über Integralformeln der Einheitssphäre und Harmonische Splinefunktionen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 1982. [Google Scholar]
- Bucha, B.; Janak, J.; Papco, J.; Bezdek, A. High-resolution regional gravity field modelling in a mountainous area from terrestrial gravity data. Geophys. J. Int. 2016, 207, 949–966. [Google Scholar] [CrossRef]
- Slobbe, C.; Klees, R.; Farahani, H.H.; Huisman, L.; Alberts, B.; Voet, P.; De Doncker, F. The Impact of Noise in a GRACE/GOCE Global Gravity Model on a Local Quasi-Geoid. J. Geophys. Res. Solid Earth 2019, 124, 3219–3237. [Google Scholar] [CrossRef]
- Sánchez, L.; Ågren, J.; Huang, J.; Wang, Y.M.; Forsberg, R. Basic Agreements for the Computation of Station Potential Values as IHRS Coordinates, Geoid Undulations and Height Anomalies within the Colorado 1 cm Geoid Experiment. 2018. Available online: https://ihrs.dgfi.tum.de/fileadmin/JWG_2015/Colorado_Experiment_Basic_req_V0.5_Oct30_2018.pdf (accessed on 28 April 2022).
- Bachmaier, M.; Backes, M. Variogram or Semivariogram? Variance or Semivariance? Allan Variance or Introducing a New Term? Math. Geosci. 2011, 43, 735–740. [Google Scholar] [CrossRef]
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools Version 6. Geochem. Geophys. Geosys. 2019, 20, 5556–5564. [Google Scholar] [CrossRef]
- Sivia, D.S.; Skiling, J. Data Analysis: A Bayesian Tutorial, 2nd ed.; Oxford University Press: Oxford, UK, 2006. [Google Scholar]
- Koch, K.R. Introduction to Bayesian Statistics, 2nd ed.; Springer: Berlin, Germany, 2007. [Google Scholar]
- Magnus, J.R.; Neudecker, H. Matrix Differential Calculus with Applications in Statistics and Econometrics, 3rd ed.; John Wiley and Sons: New York, NY, USA, 2007. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observations | Min | Max | Mean | STD |
|---|---|---|---|---|
| Terrestrial | −141.50 | 212.45 | 5.92 | 38.15 |
| Terrestrial | −136.09 | 75.31 | 0.83 | 6.92 |
| Airborne | −44.64 | 118.91 | 6.10 | 28.81 |
| Airborne | −18.88 | 21.38 | 0.37 | 3.23 |
| Function Types | Legendre Coefficients |
|---|---|
| Shannon function | |
| CuP function |
| LASSO | Tikhonov Regularization | |||
|---|---|---|---|---|
| RMS (cm) | RMS (cm) | |||
| 5000 | 2.93 | 2.89 | ||
| 5500 | 2.82 | 2.79 | ||
| 6000 | 2.91 | 2.88 | ||
| 6500 | 3.07 | 3.05 | ||
| 6700 | 3.16 | 3.14 | ||
| Solution | Min | Max | Mean | RMS | STD |
|---|---|---|---|---|---|
| LASSO | −6.63 | 4.38 | 0.37 | 2.82 | 2.79 |
| Tikhonov | −6.16 | 4.44 | 0.76 | 2.79 | 2.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Chang, G.; Zhang, S.; Zhu, Y.; Yu, Y. Application of Sparse Regularization in Spherical Radial Basis Functions-Based Regional Geoid Modeling in Colorado. Remote Sens. 2023, 15, 4870. https://doi.org/10.3390/rs15194870
Yu H, Chang G, Zhang S, Zhu Y, Yu Y. Application of Sparse Regularization in Spherical Radial Basis Functions-Based Regional Geoid Modeling in Colorado. Remote Sensing. 2023; 15(19):4870. https://doi.org/10.3390/rs15194870
Chicago/Turabian StyleYu, Haipeng, Guobin Chang, Shubi Zhang, Yuhua Zhu, and Yajie Yu. 2023. "Application of Sparse Regularization in Spherical Radial Basis Functions-Based Regional Geoid Modeling in Colorado" Remote Sensing 15, no. 19: 4870. https://doi.org/10.3390/rs15194870