

Aerial Drone Imaging in Alongshore Marine Ecosystems: Small-Scale Detection of a Coastal Spring System in the North-Eastern Adriatic Sea

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
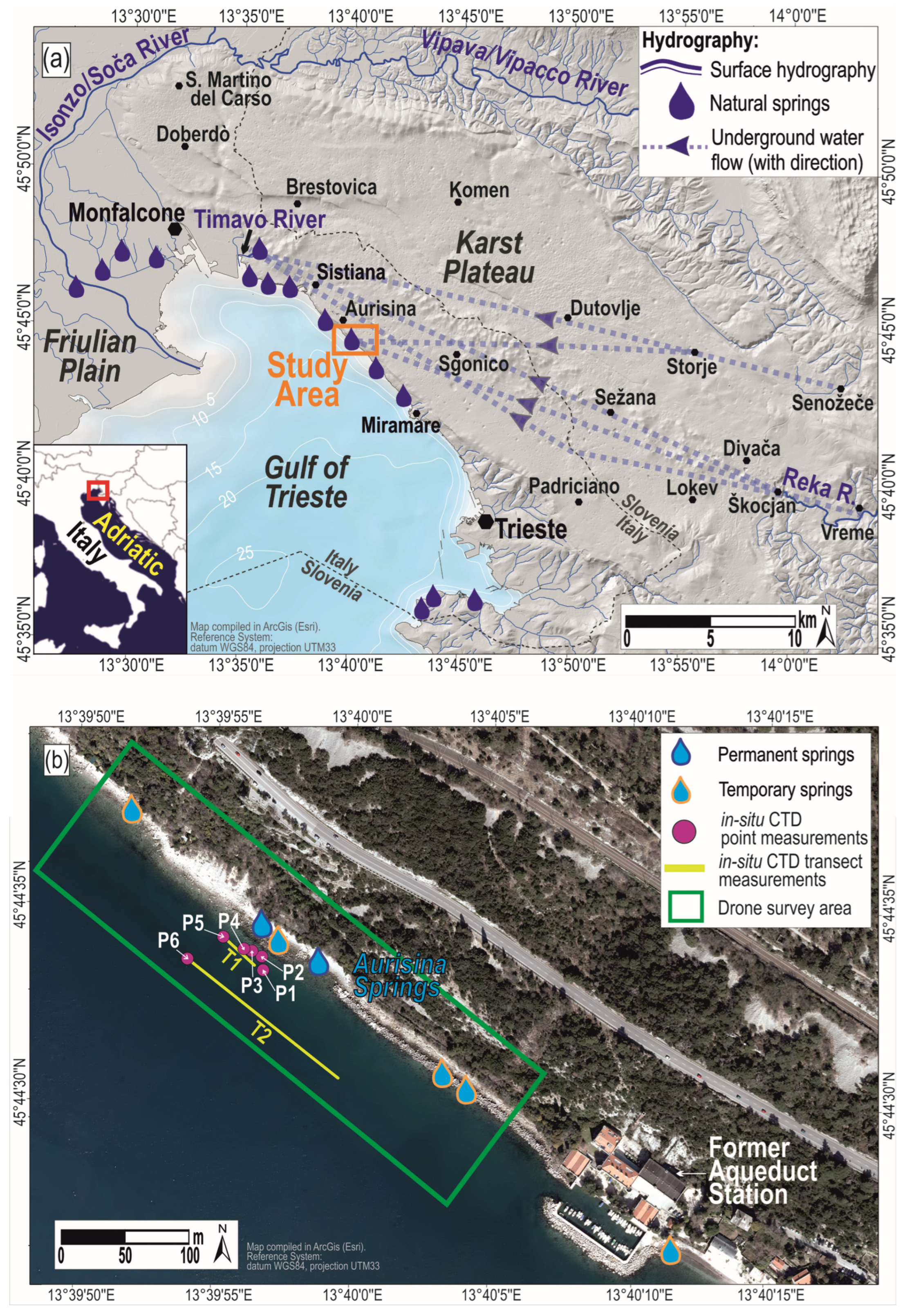
2.1. Study Area and Site
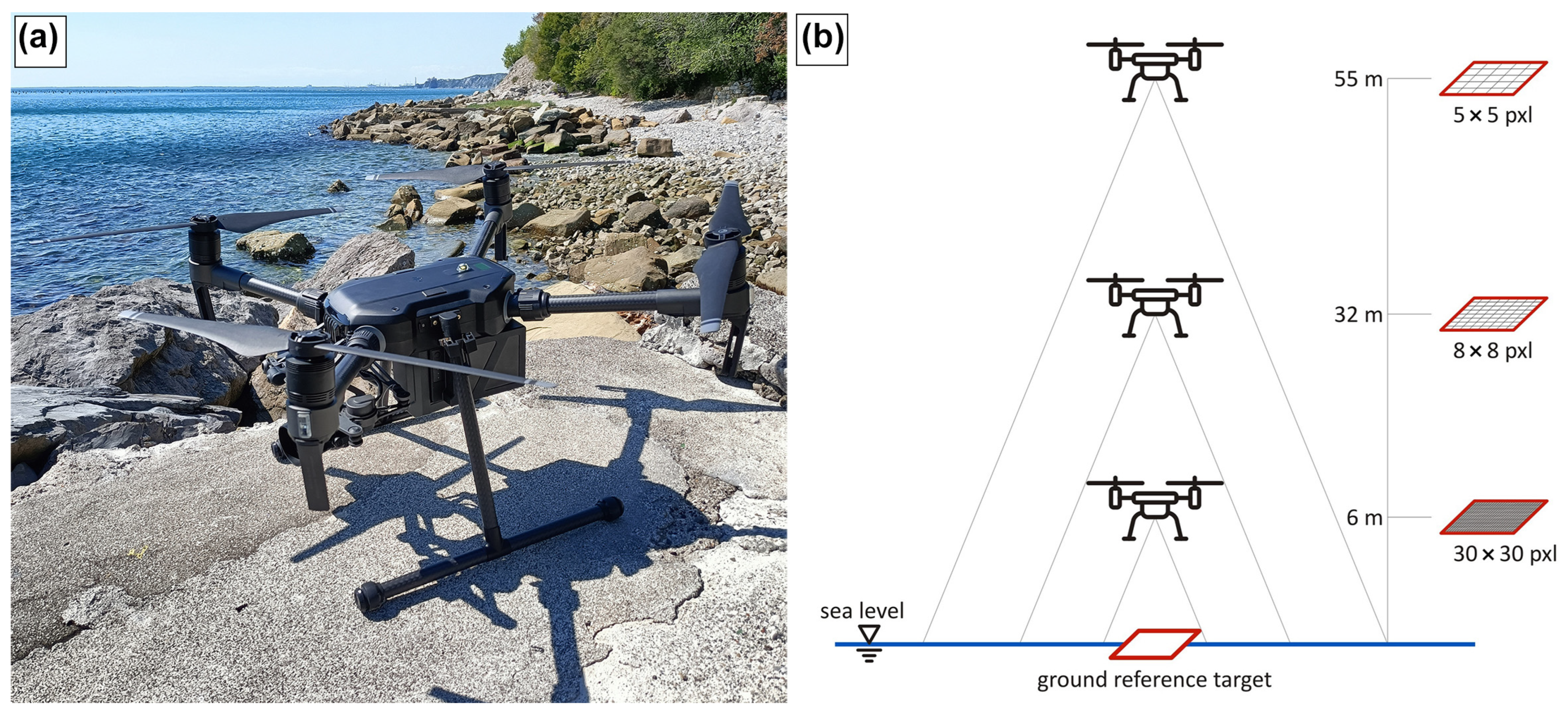
2.2. Aerial Drone
2.3. Oceanographic Monitoring
3. Results
4. Discussion
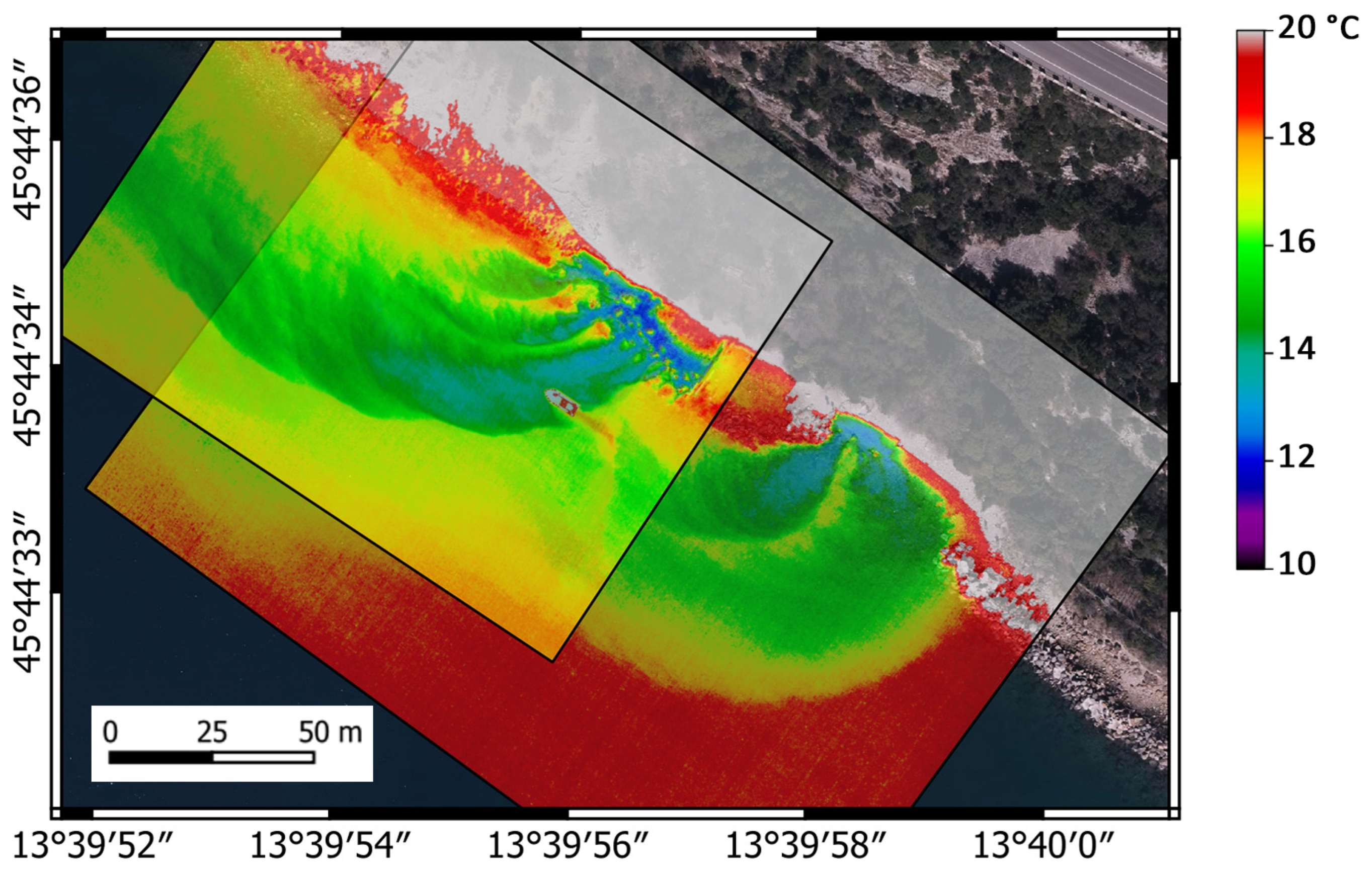
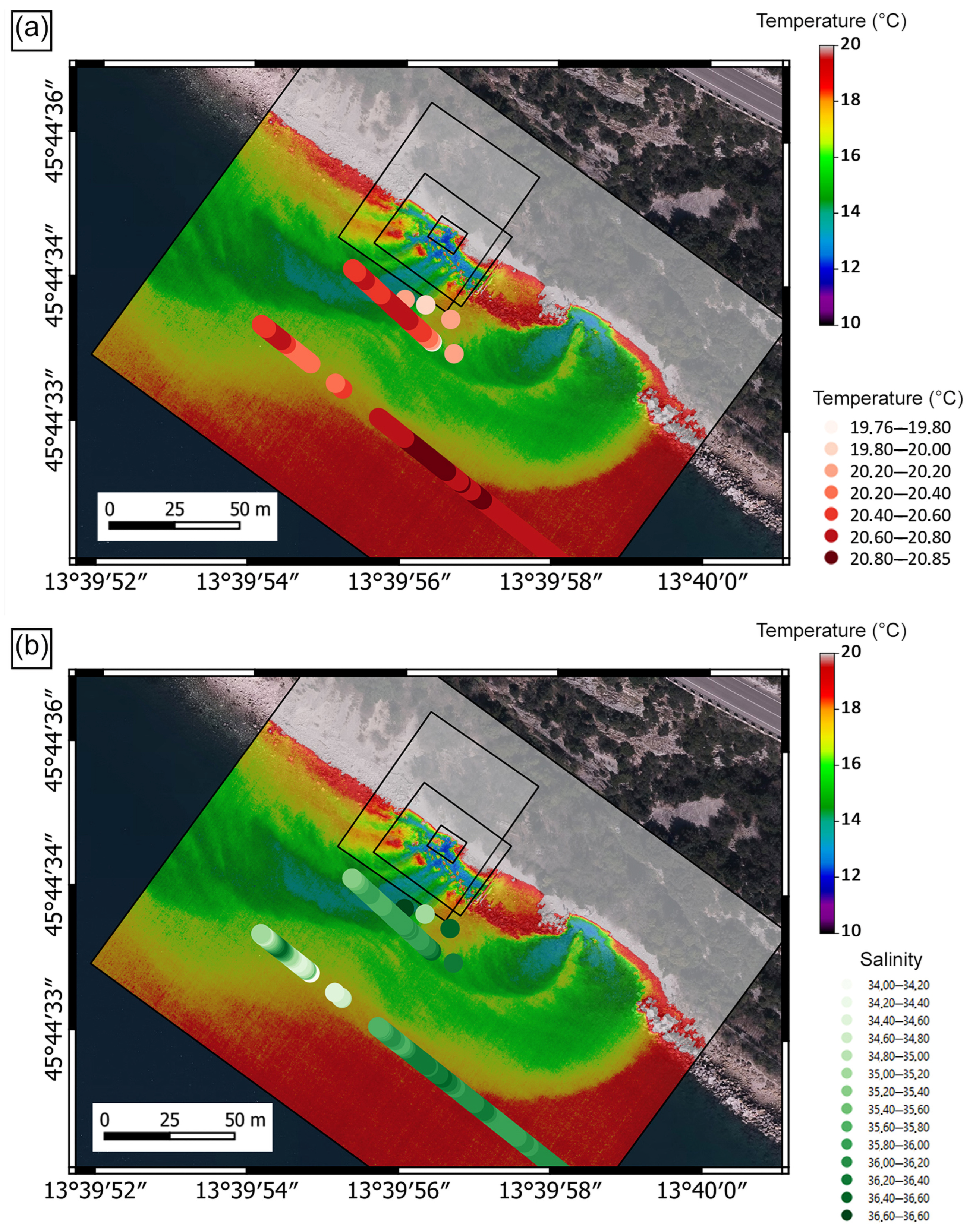
- The drone proved to be able to clearly detect the thermal contrasts between seawater and freshwater, confirming its usability for detecting relative temperature differences between different water masses [8]. Anyway, attention must be paid when several drone images collected at different altitudes or times are merged together as the drone may assign different temperatures to the same surface, not following a precise trend due to light condition variations;
- In case it is necessary to know the absolute values of sea surface temperature, it might be advisable to couple the drone survey with an oceanographic sampling on site (as we did), so as to correct the thermal values detected by the drone with real data. In particular, if the probe is equipped with sensors for variables other than temperature (like conductivity, chlorophyll concentration, turbidity, etc.), this procedure can provide additional data to support the findings. Particular care has to be taken to select the side of the boat that enters the water mass first, in order to avoid any possible perturbation of the surface water features due to the boat;
- The heterogeneity of the surface under investigation or of cloud coverage could hamper an accurate correction of temperature values provided by drone imagery. Clearly, in emergency situations (such an oil spill or an accidental wastewater discharge), it may be impossible to wait for the ideal irradiation conditions, therefore this uncertainty factor must be taken into account.
- To assemble the photo-mosaic, it is necessary to geo-reference the images. In general, the drone provides an accuracy on its positioning of approximately 2–4 m through aerial triangulation and onboard GNSS. To achieve better accuracy (up to a few cm), it is possible to apply other approaches. Natural GCPs extracted from true orthophotos can be used, and in this case the obtained resolution is that of the orthophoto. For this reason, it is advisable to capture images that contain part of the emerged land or fixed reference points at sea such as platforms and beacons. Otherwise, new GCPs, regularly distributed in the survey area, should be signalized and measured. However, the use and measurement of new GCPs is time-consuming and sometimes even not realizable [21]. As an alternative to the previous method, it is possible to use drones with an onboard multi-sensor system (e.g., dual-frequency GNSS chip, IMU, etc.) and RTK (Real Time Kinematics) or NRTK (Network Real Time Kinematic) GNSS technique, which provide precise information in real time with no need for GCPs [22]. However, the use of these techniques may encounter limitations caused by the presence of natural (e.g., cliffs) or artificial obstructions [23], unstable LTE signal or bad satellite configuration. The best resolution could be obtained by combining the use of GCPs and RTK/NRTK technique [24,25].
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Klemas, V.V. Coastal and Environmental Remote Sensing from Unmanned Aerial Vehicles: An Overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- The European Space Agency. Available online: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-2_overview (accessed on 2 October 2023).
- NASA Landsat Science. Available online: https://landsat.gsfc.nasa.gov/satellites/landsat-8/ (accessed on 2 October 2023).
- Sedano-Cibrián, J.; Pérez-Álvarez, R.; de Luis-Ruiz, J.M.; Pereda-García, R.; Salas-Menocal, B.R. Thermal Water Prospection with UAV, Low-Cost Sensors and GIS. Application to the Case of La Hermida. Sensors 2022, 22, 6756. [Google Scholar] [CrossRef] [PubMed]
- Muchiri, N.; Kimathi, S. A review of applications and potential applications of UAV. In Proceedings of the 2016 Annual Conference on Sustainable Research and Innovation, Nairobi, Kenya, 4–6 May 2016. [Google Scholar]
- Lira, C.; Taborda, R. Advances in Applied Remote Sensing to Coastal Environments Using Free Satellite Imagery. In Remote Sensing and Modeling; Finkl, C., Makowski, C., Eds.; Springer: Cham, Switzerland, 2014; Volume 9, pp. 77–102. [Google Scholar] [CrossRef]
- Mangel, A.R.; Dawson, C.B.; Rey, D.M.; Briggs, M.A. Drone applications in hydrogeophysics: Recent examples and a vision for the future. Lead. Edge 2022, 41, 540–547. [Google Scholar] [CrossRef]
- Lee, E.; Yoon, H.; Hyun, S.P.; Burnett, W.C.; Koh, D.C.; Ha, K.; Kim, D.J.; Kim, Y.; Kang, K.M. Unmanned aerial vehicles (UAVs)-based thermal infrared (TIR) mapping, a novel approach to assess groundwater discharge into the coastal zone. Limnol. Oceanogr. Methods 2016, 14, 725–735. [Google Scholar] [CrossRef]
- Mallast, U.; Siebert, C. Combining continuous spatial and temporal scales for SGD investigations using UAV-based thermal infrared measurements. Hydrol. Earth Syst. Sci. 2019, 23, 1375–1392. [Google Scholar] [CrossRef]
- KarisAllen, J.J.; Mohammed, A.A.; Tamborski, J.J.; Jamieson, R.C.; Danielescu, S.; Kurylyk, B.L. Present and future thermal regimes of intertidal groundwater springs in a threatened coastal ecosystem. Hydrol. Earth Syst. Sci. 2022, 26, 4721–4740. [Google Scholar] [CrossRef]
- Accerboni, E.; Mosetti, F. Localizzazione dei deflussi d’acqua dolce in mare mediante un conduttometro elettrico superficiale a registrazione continua. Boll. Geofis. 1967, 9, 255–268. [Google Scholar]
- Cucchi, F.; Zini, L.; Calligaris, C. Le Acque del Carso Classico—Progetto Hydrokarst (The Water of the Classical Karst—Project HydroKarst); Edizioni Università di Trieste: Trieste, Italy, 2015; p. 179. [Google Scholar]
- Eagle-FVG. Sistema di Consultazione delle Banche Dati della Regione Autonoma Friuli-Venezia Giulia. Connected to the “IRDAT: Infrastruttura Regionale di Dati Ambientali e Territoriali per la Regione Autonoma Friuli Venezia Giulia”. Available online: https://eaglefvg.regione.fvg.it/ (accessed on 3 August 2023).
- ARSO. Geoportal of the Slovenian Environment Agency, Ministry of the Environment, Climate and Energy. Available online: https://gis.arso.gov.si (accessed on 3 August 2023).
- Flir Commercial Systems. Advanced Radiometry, Application Note; Flir Commercial Systems: Goleta, CA, USA, 2014; pp. 1–18. [Google Scholar]
- 3D FLOW. Available online: https://www.3dflow.net/3df-zephyr-photogrammetry-software/ (accessed on 2 October 2023).
- Oberle, F.K.J.; Prouty, N.G.; Swarzenski, P.W.; Storlazzi, C.D. High-resolution observations of submarine groundwater discharge reveal the fine spatial and temporal scales of nutrient exposure on a coral reef: Faga’alu, AS. Coral Reefs 2022, 41, 849–854. [Google Scholar] [CrossRef]
- Lega, M.; Ferrara, C.; Persechino, G.; Bishop, P. Remote sensing in environmental police investigations: Aerial platforms and an innovative application of thermography to detect several illegal activities. Environ. Monit. Assess. 2014, 186, 8291–8301. [Google Scholar] [CrossRef] [PubMed]
- Sancho Martínez, J.; Fernández, Y.B.; Leinster, P.; Casado, M.R. Combining Unmanned Aircraft Systems and Image Processing for Wastewater Treatment Plant Asset Inspection. Remote Sens. 2020, 12, 1461. [Google Scholar] [CrossRef]
- Mishra, V.; Avtar, R.; Prathiba, A.P.; Mishra, P.K.; Tiwari, A.; Sharma, S.K.; Singh, C.H.; Yadav, B.C.; Jain, K. Uncrewed Aerial Systems in Water Resource Management and Monitoring: A Review of Sensors, Applications, Software, and Issues. Adv. Civ. Eng. 2023, 2023, 3544724. [Google Scholar] [CrossRef]
- Li, X.Y. Principle, Method and Practice of IMU/DGPS Based Photogrammetry. Ph.D. Thesis, Information Engineering University, Zhengzhou, China, 2005. [Google Scholar]
- Fazeli, H.; Samadzadegan, F.; Dadrasjavan, F. Evaluating the potential of RTK-UAV for automatic point cloud generation in 3D rapid mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B6, 221–226. [Google Scholar] [CrossRef]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise positioning of UAVs–dealing with challenging RTK-GPS measurement conditions during automated UAV flights. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-2/W3, 95–102. [Google Scholar] [CrossRef]
- Eling, C.; Wieland, M.; Hess, C.; Klingbeil, L.; Kuhlmann, H. Development and evaluation of a UAV based mapping system for remote sensing and surveying applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 233–239. [Google Scholar] [CrossRef]
- Rabah, M.; Basiouny, M.; Ghanem, E.; Elhadary, A. Using RTK and VRS in direct geo-referencing of the UAV imagery. NRIAG J. Astron. Geophys. 2018, 7, 220–226. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
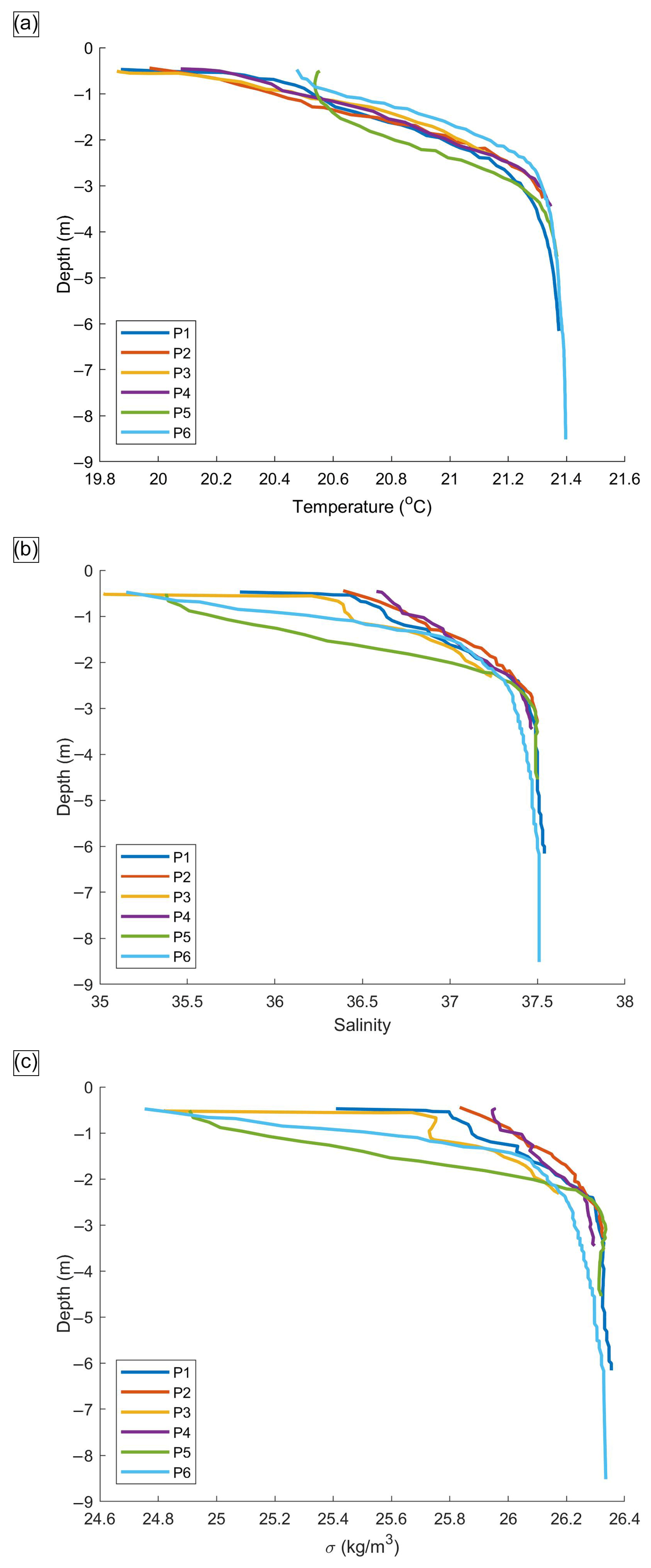
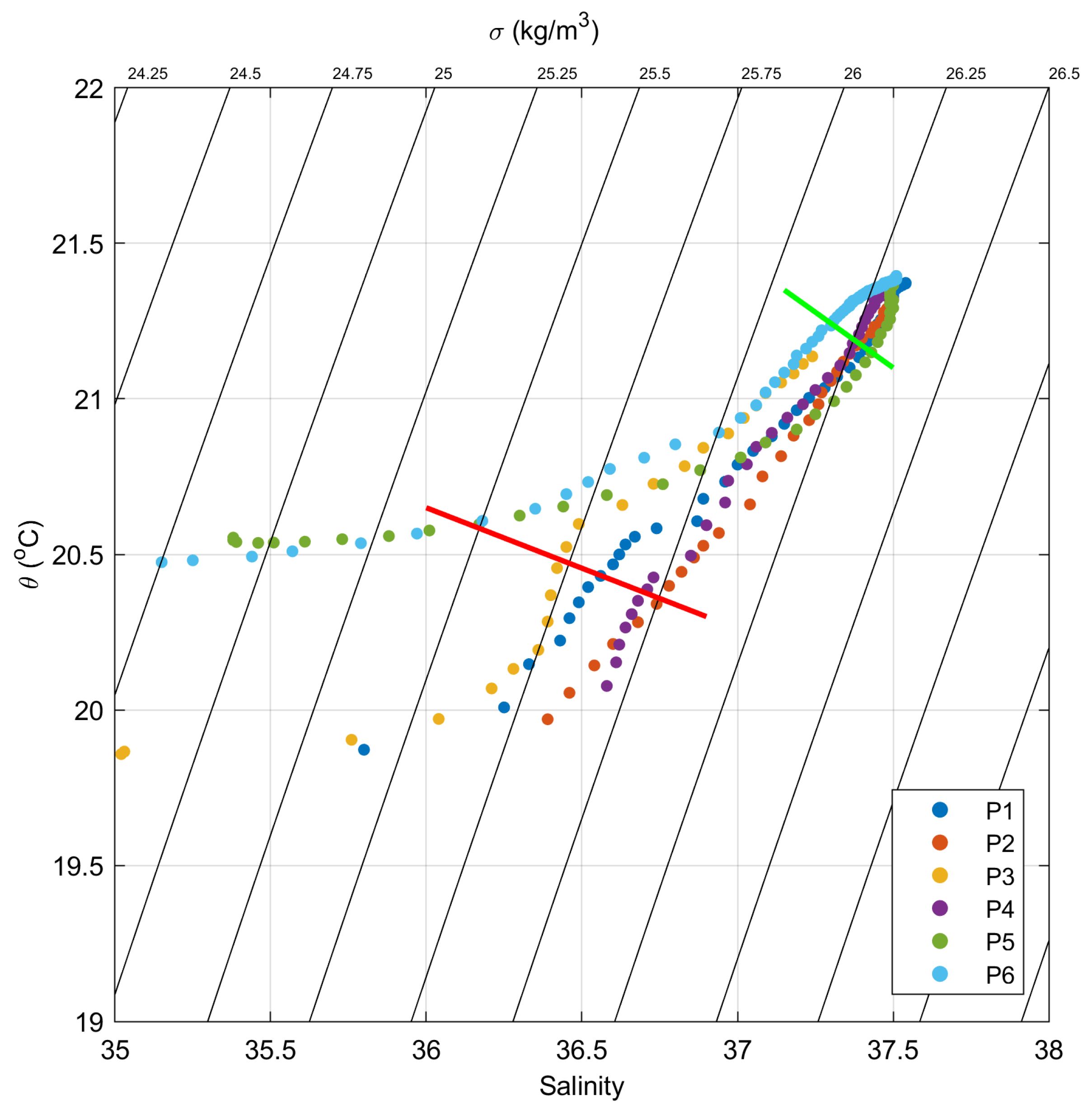
| Profile | N. of Points | Temperature (°C) | Salinity | σ (kg/m3) |
|---|---|---|---|---|
| P1 | 4 | 20.06 ± 0.15 | 36.20 ± 0.28 | 25.67 ± 0.17 |
| P2 | 1 | 20.06 ± 0.00 | 36.46 ± 0.00 | 25.86 ± 0.00 |
| P3 | 2 | 19.86 ± 0.01 | 35.03 ± 0.01 | 24.82 ± 0.00 |
| P4 | 3 | 20.15 ± 0.07 | 36.60 ± 0.02 | 25.95 ± 0.00 |
| P5 | 2 | 20.55 ± 0.01 | 35.38 ± 0.00 | 24.91 ± 0.00 |
| P6 | 2 | 20.48 ± 0.00 | 35.20 ± 0.07 | 24.79 ± 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savonitto, G.; Paganini, P.; Pavan, A.; Busetti, M.; Giustiniani, M.; Dal Cin, M.; Comici, C.; Küchler, S.; Gerin, R. Aerial Drone Imaging in Alongshore Marine Ecosystems: Small-Scale Detection of a Coastal Spring System in the North-Eastern Adriatic Sea. Remote Sens. 2023, 15, 4864. https://doi.org/10.3390/rs15194864
Savonitto G, Paganini P, Pavan A, Busetti M, Giustiniani M, Dal Cin M, Comici C, Küchler S, Gerin R. Aerial Drone Imaging in Alongshore Marine Ecosystems: Small-Scale Detection of a Coastal Spring System in the North-Eastern Adriatic Sea. Remote Sensing. 2023; 15(19):4864. https://doi.org/10.3390/rs15194864
Chicago/Turabian StyleSavonitto, Gilda, Paolo Paganini, Alessandro Pavan, Martina Busetti, Michela Giustiniani, Michela Dal Cin, Cinzia Comici, Stefano Küchler, and Riccardo Gerin. 2023. "Aerial Drone Imaging in Alongshore Marine Ecosystems: Small-Scale Detection of a Coastal Spring System in the North-Eastern Adriatic Sea" Remote Sensing 15, no. 19: 4864. https://doi.org/10.3390/rs15194864