

Assimilating AMSU-A Radiance Observations with an Ensemble Four-Dimensional Variational (En4DVar) Hybrid Data Assimilation System
 , , , , ,
, , , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. A Brief Description of DA Methods
2.2. Localization
2.2.1. Observation Space Localization
2.2.2. Vertical Positioning of AMSU-A Radiance Observation
2.3. DA Configurations, Experimental Details and Observations
2.3.1. DA Configurations
2.3.2. Experimental Details
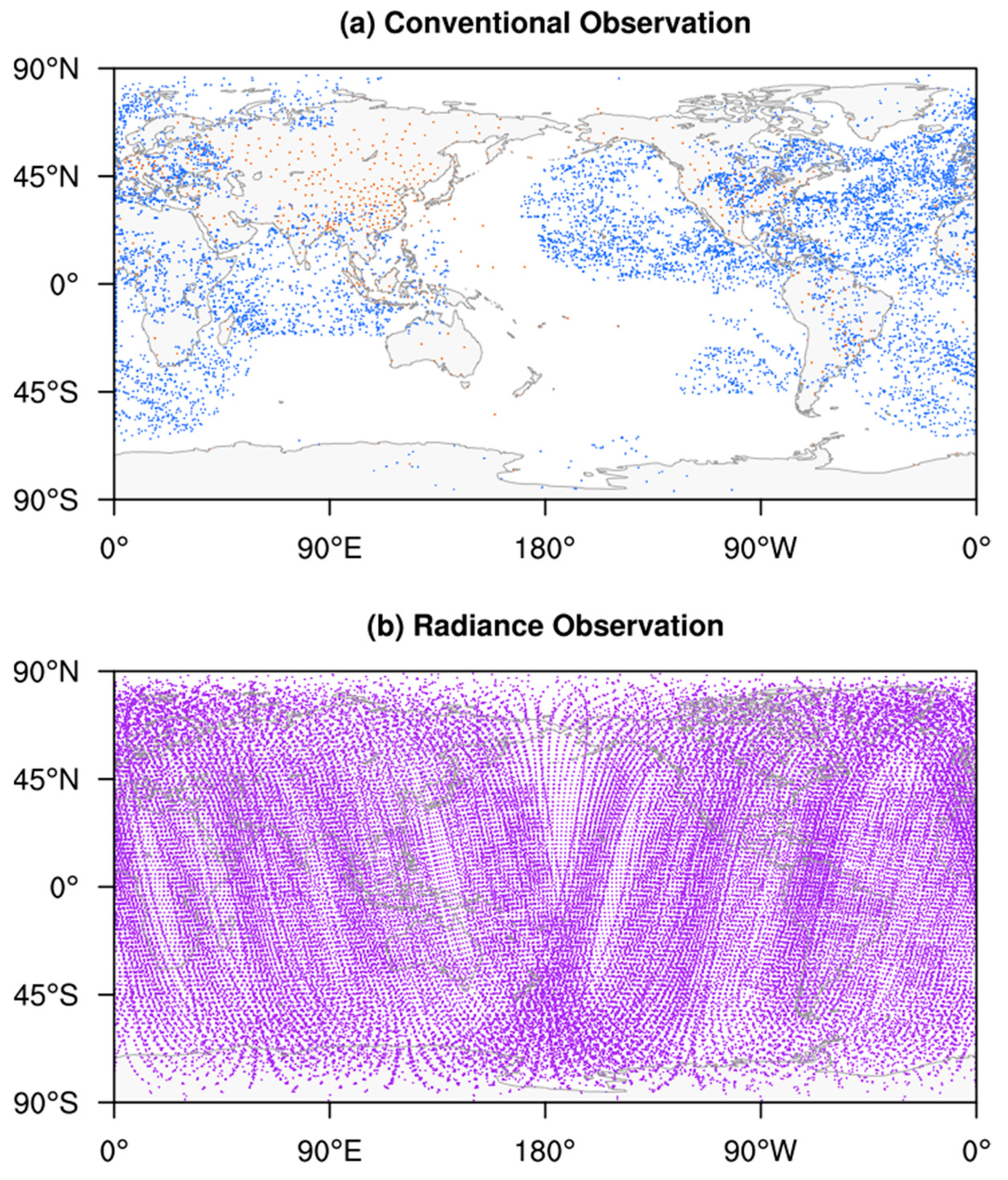
2.3.3. Observations
2.4. Evaluation Method
3. Results
3.1. Vertical Positioning Method
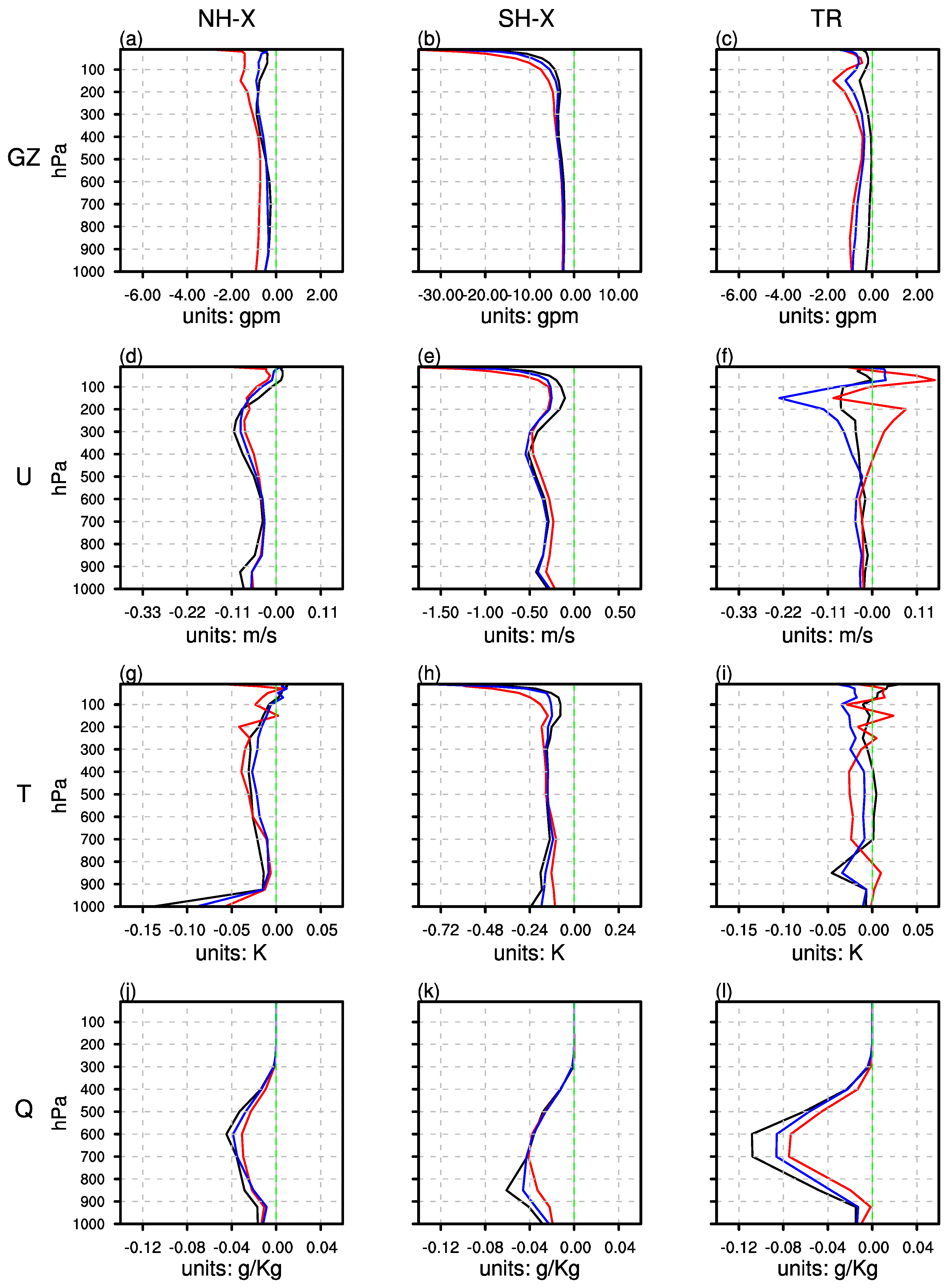
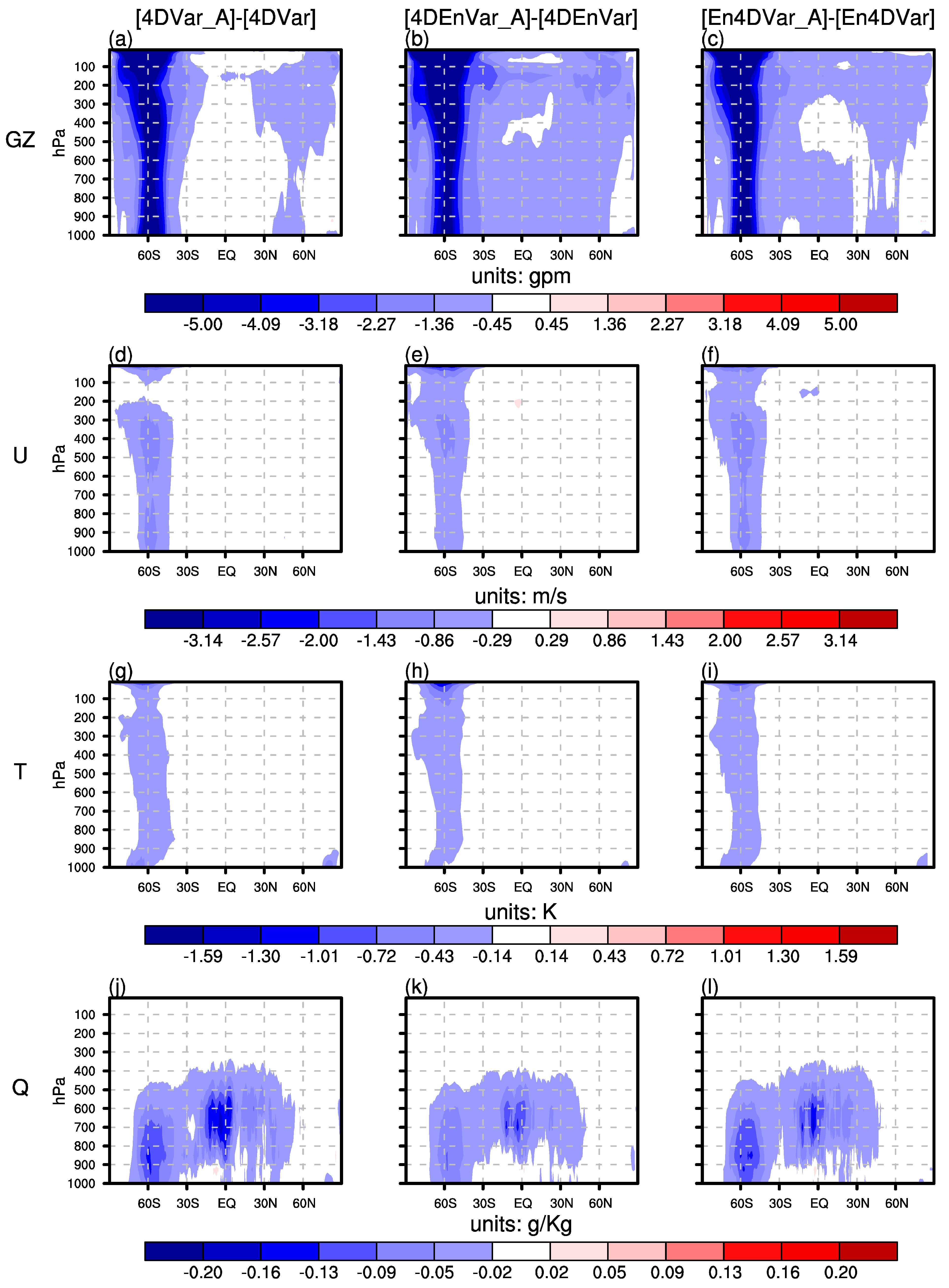
3.2. Effects of AMSU-A Radiance Observations on Analysis Quality
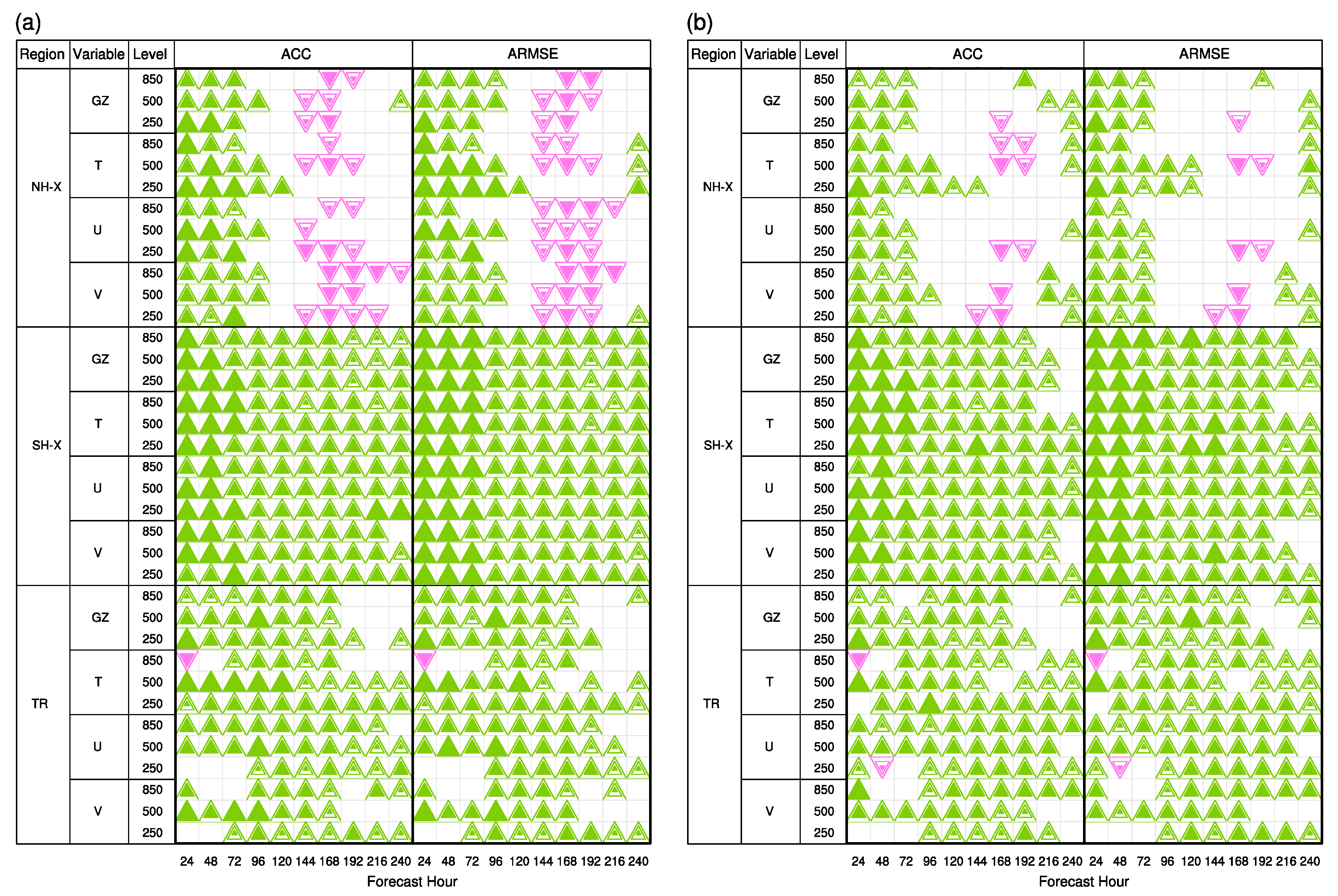
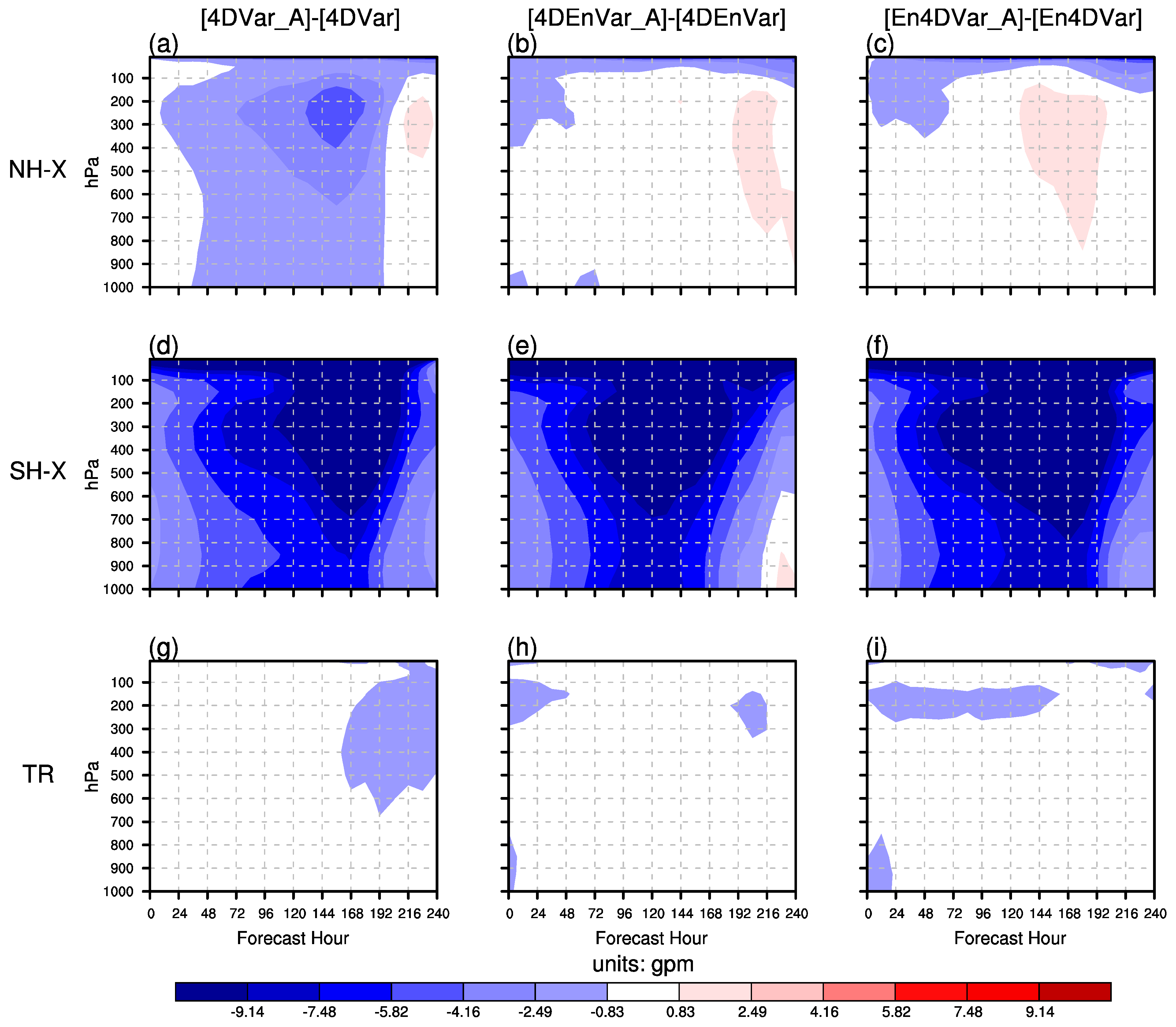
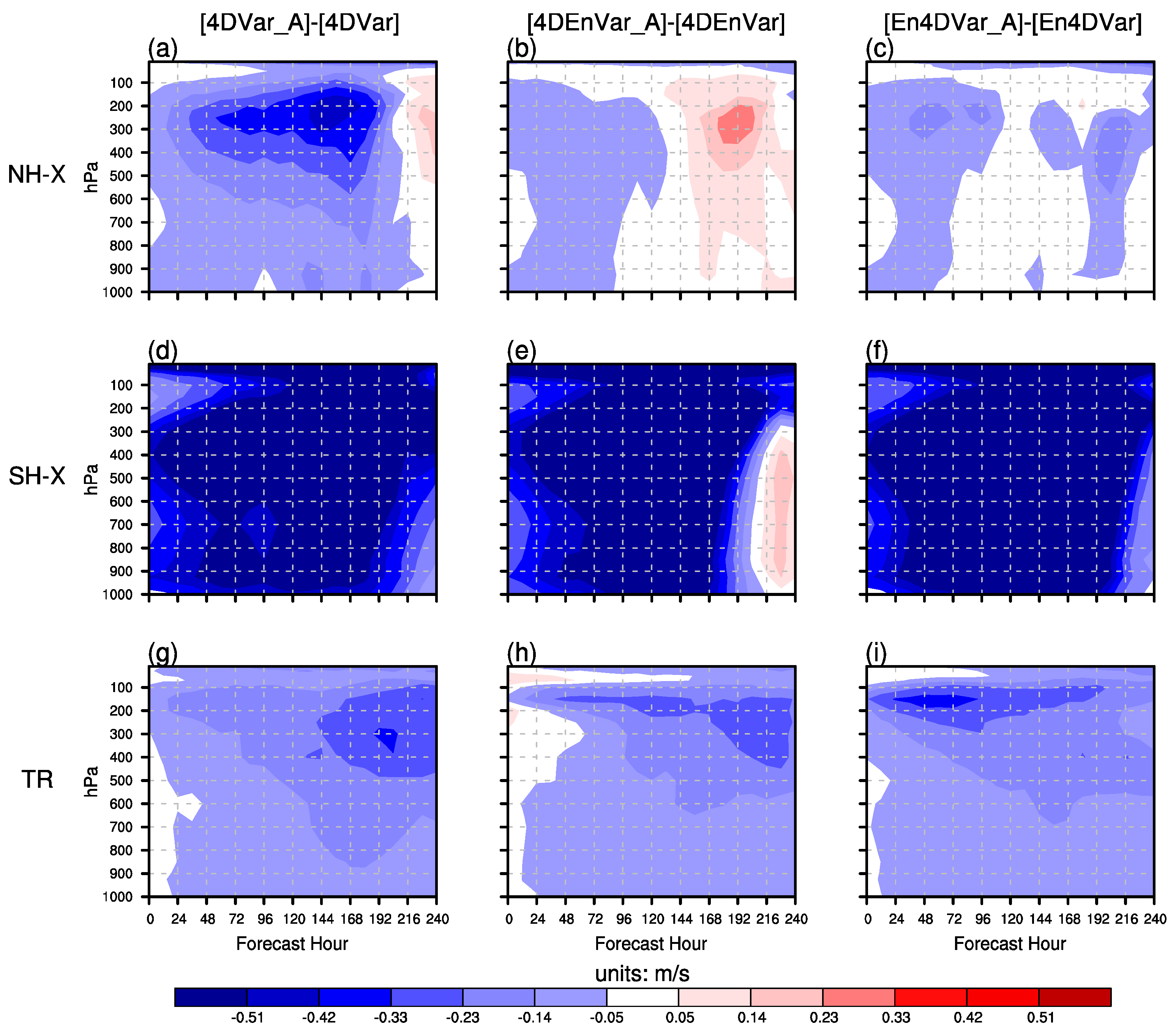
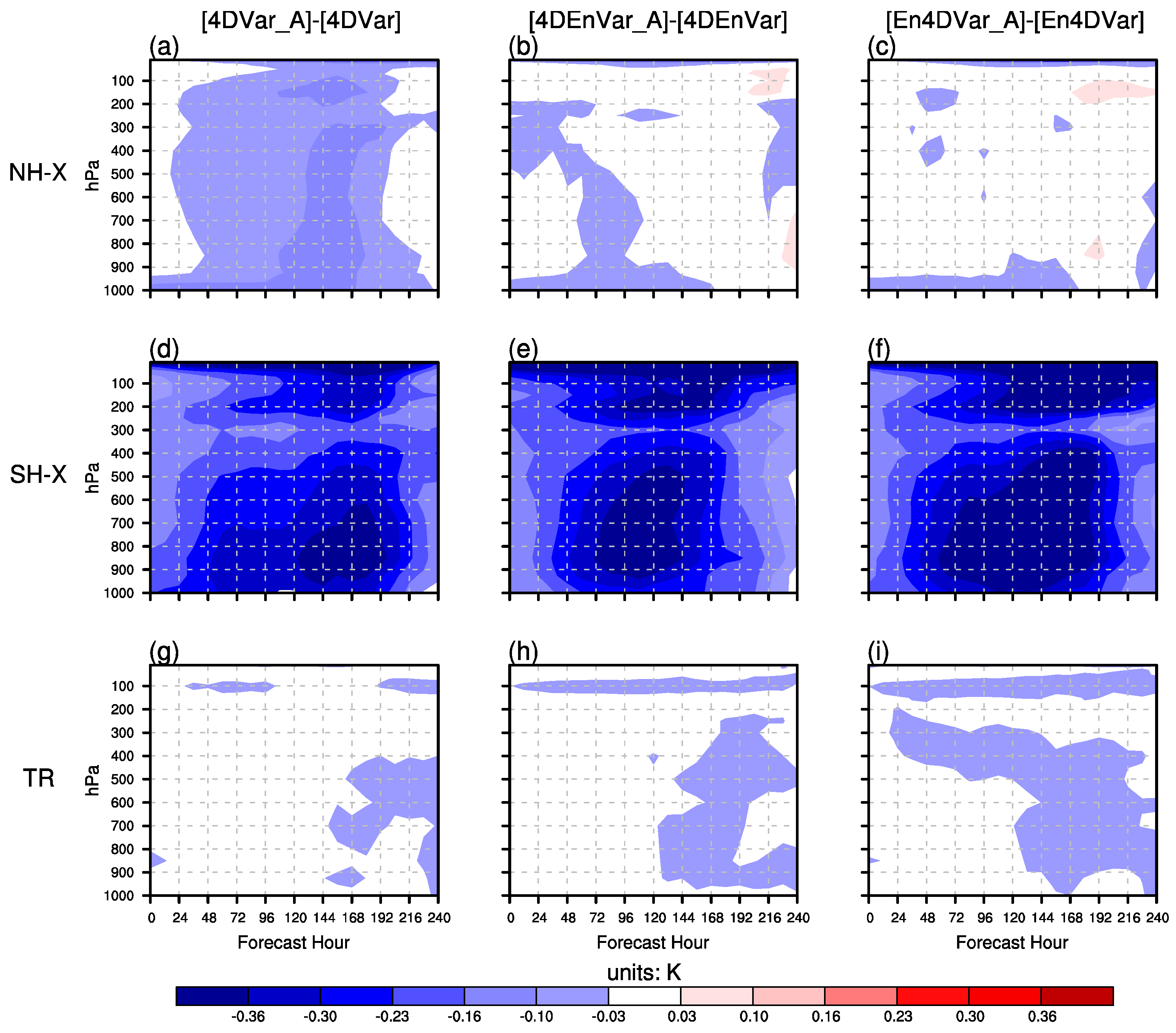
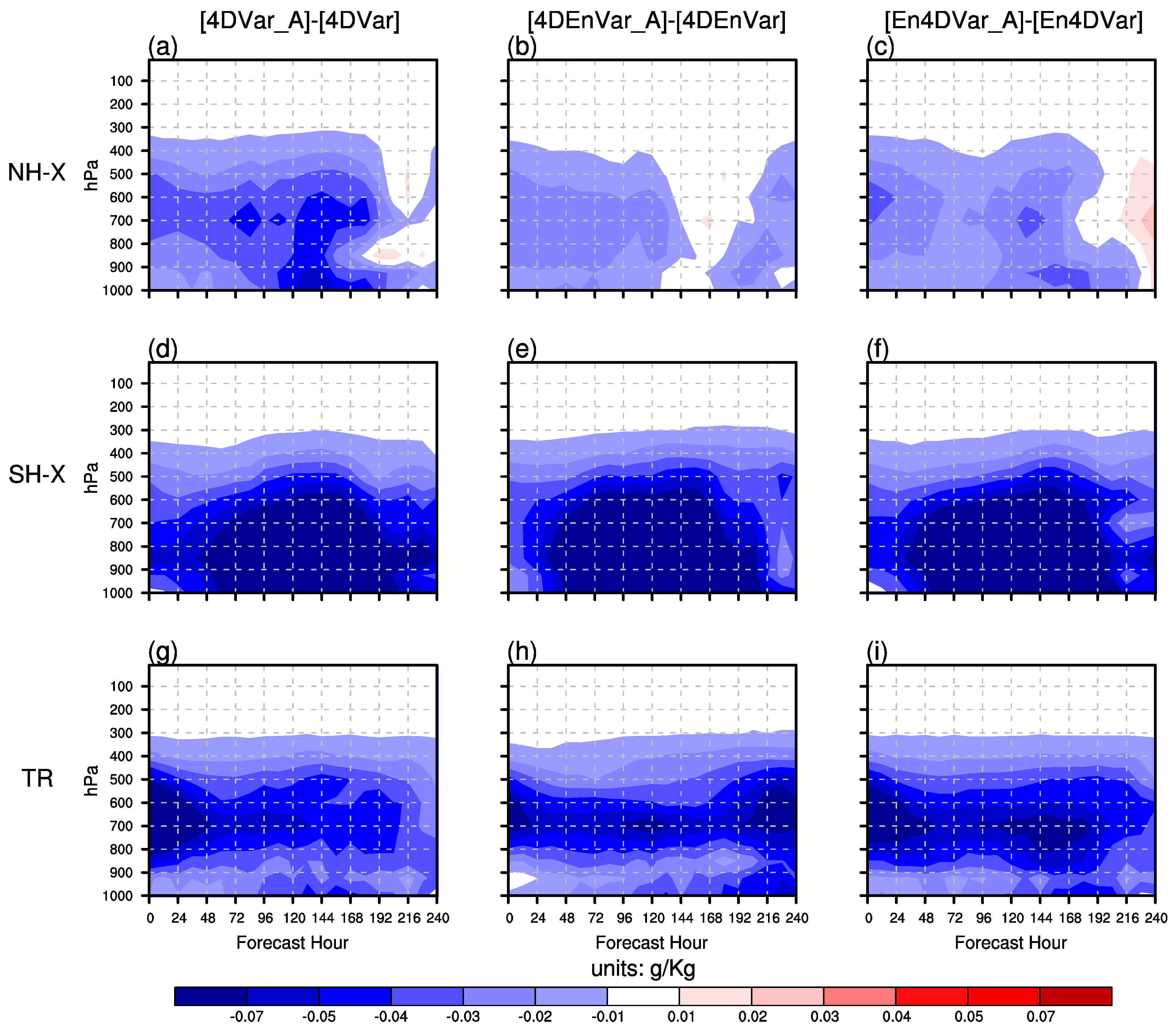
3.3. Effects of AMSU-A Radiance Observations on Forecast Skill
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Raynaud, L.; Berre, L.; Desroziers, G. An extended specification of flow-dependent background error variances in the Météo-France global 4D-Var system. Q. J. R. Meteorol. Soc. 2011, 137, 607–619. [Google Scholar] [CrossRef]
- Bonavita, M.; Isaksen, L.; Hólm, E. On the use of EDA background error variances in the ECMWF 4D-Var. Q. J. R. Meteorol. Soc. 2012, 138, 1540–1559. [Google Scholar] [CrossRef]
- Bonavita, M.; Hólm, E.; Isaksen, L.; Fisher, M. The evolution of the ECMWF hybrid data assimilation system. Q. J. R. Meteorol. Soc. 2016, 142, 287–303. [Google Scholar] [CrossRef]
- Clayton, A.M.; Lorenc, A.C.; Barker, D.M. Operational implementation of a hybrid ensemble/4D-Var global data assimilation system at the Met Office. Q. J. R. Meteorol. Soc. 2013, 139, 1445–1461. [Google Scholar] [CrossRef]
- Lorenc, A.C.; Bowler, N.E.; Clayton, A.M.; Pring, S.R.; Fairbairn, D. Comparison of hybrid-4DEnVar and hybrid-4DVar data assimilation methods for global NWP. Mon. Weather Rev. 2015, 143, 212–229. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L. Data assimilation using an ensemble Kalman filter technique. Mon. Weather Rev. 1998, 126, 796–811. [Google Scholar] [CrossRef]
- Anderson, J.L. Exploring the need for localization in ensemble data assimilation using a hierarchical ensemble filter. Phys. D Nonlinear Phenom. 2007, 230, 99–111. [Google Scholar] [CrossRef]
- Liu, C.; Xiao, Q.; Wang, B. An ensemble-based four-dimensional variational data assimilation scheme. Part II: Observing system simulation experiments with Advanced Research WRF (ARW). Mon. Weather Rev. 2009, 137, 1687–1704. [Google Scholar] [CrossRef]
- Hamill, T.M.; Whitaker, J.S.; Snyder, C. Distance-dependent filtering of background error covariance estimates in an ensemble Kalman filter. Mon. Weather Rev. 2001, 129, 2776–2790. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Liu, L.; Xu, S.; Huang, W. An approach to localization for ensemble-based data assimilation. PLoS ONE 2018, 13, e0191088. [Google Scholar] [CrossRef] [Green Version]
- Houtekamer, P.L.; Mitchell, H.L.; Pellerin, G.; Buehner, M.; Charron, M.; Spacek, L.; Hansen, B. Atmospheric data assimilation with an ensemble Kalman filter: Results with real observations. Mon. Weather Rev. 2005, 133, 604–620. [Google Scholar] [CrossRef] [Green Version]
- Gaspari, G.; Cohn, S.E. Construction of correlation functions in two and three dimensions. Q. J. R. Meteorol. Soc. 1999, 125, 723–757. [Google Scholar] [CrossRef]
- Ott, E.; Hunt, B.R.; Szunyogh, I.; Zimin, A.V.; Kostelich, E.J.; Corazza, M.; Kalnay, E.; Patil, D.J.; Yorke, J.A. A local ensemble Kalman filter for atmospheric data assimilation. Tellus A Dyn. Meteorol. Oceanogr. 2004, 56, 415–428. [Google Scholar] [CrossRef]
- Buehner, M.; Houtekamer, P.L.; Charette, C.; Mitchell, H.L.; He, B. Intercomparison of variational data assimilation and the ensemble Kalman filter for global deterministic NWP. Part I: Description and single-observation experiments. Mon. Weather Rev. 2010, 138, 1550–1566. [Google Scholar] [CrossRef]
- Buehner, M.; Houtekamer, P.L.; Charette, C.; Mitchell, H.L.; He, B. Intercomparison of variational data assimilation and the ensemble Kalman filter for global deterministic NWP. Part II: One-month experiments with real observations. Mon. Weather Rev. 2010, 138, 1567–1586. [Google Scholar] [CrossRef]
- Bishop, C.H.; Hodyss, D.; Steinle, P.; Sims, H.; Clayton, A.M.; Lorenc, A.C.; Barker, D.M.; Buehner, M. Efficient ensemble covariance localization in variational data assimilation. Mon. Weather Rev. 2011, 139, 573–580. [Google Scholar] [CrossRef]
- Kuhl, D.D.; Rosmond, T.E.; Bishop, C.H.; McLay, J.; Baker, N.L. Comparison of hybrid ensemble/4DVar and 4DVar within the NAVDAS-AR data assimilation framework. Mon. Weather Rev. 2013, 141, 2740–2758. [Google Scholar] [CrossRef]
- Simmons, A.J.; Hollingsworth, A. Some aspects of the improvement in skill of numerical weather prediction. Q. J. R. Meteorol. Soc. A J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2002, 128, 647–677. [Google Scholar] [CrossRef]
- Fertig, E.J.; Hunt, B.R.; Ott, E.; Szunyogh, I. Assimilating non-local observations with a local ensemble Kalman filter. Tellus A Dyn. Meteorol. Oceanogr. 2007, 59, 719–730. [Google Scholar] [CrossRef]
- Miyoshi, T.; Sato, Y. Assimilating satellite radiances with a local ensemble transform Kalman filter (LETKF) applied to the JMA global model (GSM). Sola 2007, 3, 37–40. [Google Scholar] [CrossRef] [Green Version]
- Campbell, W.F.; Bishop, C.H.; Hodyss, D. Vertical covariance localization for satellite radiances in ensemble Kalman filters. Mon. Weather Rev. 2010, 138, 282–290. [Google Scholar] [CrossRef] [Green Version]
- Courtier, P.; Thépaut, J.N.; Hollingsworth, A. A strategy for operational implementation of 4D-Var, using an incremental approach. Q. J. R. Meteorol. Soc. 1994, 120, 1367–1387. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Y.; Liu, Y.; Gong, J.; Lu, H.; Jin, Z.; Tian, W.; Liu, G.; Zhou, B.; Zhao, B. The operational global four-dimensional variational data assimilation system at the China Meteorological Administration. Q. J. R. Meteorol. Soc. 2019, 145, 1882–1896. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Wang, B.; Zhang, L.; Liu, J.; Liu, Y.; Gong, J.; Xu, S.; Wang, Y.; Huang, W.; Liu, L.; et al. A Four-Dimensional Ensemble-Variational (4DEnVar) Data Assimilation System Based on GRAPES-GFS: System Description and Primary Tests. J. Adv. Model. Earth Syst. 2022, 14, e2021MS002737. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Wang, S.; Cheng, W.; Juan, L.; Liu, C.; Xiao, Q.; Kuo, Y.-H. An economical approach to four-dimensional variational data assimilation. Adv. Atmos. Sci. 2010, 27, 715–727. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Wang, B.; Zhang, L.; Liu, J.; Liu, Y.; Gong, J.; Xu, S.; Wang, Y.; Huang, W.; Liu, L.; et al. A 4DEnVar-Based Ensemble Four-Dimensional Variational (En4DVar) Hybrid Data Assimilation System for Global NWP: System Description and Primary Tests. J. Adv. Model. Earth Syst. 2022, 14, e2022MS003023. [Google Scholar] [CrossRef]
- Lorenc, A.C. The potential of the ensemble Kalman filter for NWP—A comparison with 4D-Var. Q. J. R. Meteorol. Soc. A J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2003, 129, 3183–3203. [Google Scholar] [CrossRef]
- Su, Y.; Shen, X.S.; Zhang, H.L.; Liu, Y.Z. A study on the three-dimensional reference atmosphere in GRAPES_GFS: Constructive reference state and real forecast experiment. Acta Meteorol. Sin. 2020, 78, 962–971. [Google Scholar]
- Barker, D.M. Southern high-latitude ensemble data assimilation in the Antarctic Mesoscale Prediction System. Mon. Weather Rev. 2005, 133, 3431–3449. [Google Scholar] [CrossRef]
- Wang, X.; Barker, D.M.; Snyder, C.; Hamill, T.M. A hybrid ETKF–3DVAR data assimilation scheme for the WRF model. Part I: Observing system simulation experiment. Mon. Weather Rev. 2008, 136, 5116–5131. [Google Scholar] [CrossRef] [Green Version]
- Kleist, D.T.; Ide, K. An OSSE-based evaluation of hybrid variational–ensemble data assimilation for the NCEP GFS. Part I: System description and 3D-hybrid results. Mon. Weather Rev. 2015, 143, 433–451. [Google Scholar] [CrossRef]
- Kleist, D.T.; Ide, K. An OSSE-based evaluation of hybrid variational–ensemble data assimilation for the NCEP GFS. Part II: 4DEnVar and hybrid variants. Mon. Weather Rev. 2015, 143, 452–470. [Google Scholar] [CrossRef] [Green Version]
- Saunders, R.; Hocking, J.; Turner, E.; Rayer, P.; Rundle, D.; Brunel, P.; Vidot, J.; Roquet, P.; Matricardi, M.; Geer, A.; et al. An update on the RTTOV fast radiative transfer model (currently at version 12). Geosci. Model Dev. 2018, 11, 2717–2737. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Wang, B.; Liu, L.; Huang, W.; Xu, S.; Liu, J.; Wang, Y.; Li, L.; Huang, X.; Peng, Y.; et al. A DRP-4DVar-based coupled data assimilation system with a simplified off-line localization technique for decadal predictions. J. Adv. Model. Earth Syst. 2020, 12, e2019MS001768. [Google Scholar] [CrossRef]
- Lei, L.; Whitaker, J.S.; Bishop, C. Improving assimilation of radiance observations by implementing model space localization in an ensemble Kalman filter. J. Adv. Model. Earth Syst. 2018, 10, 3221–3232. [Google Scholar] [CrossRef] [Green Version]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Wang, B.; Zhang, L.; Liu, J.; Liu, Y.; Gong, J.; Xu, S.; Wang, Y.; Huang, W.; Liu, L.; et al. Assimilating AMSU-A Radiance Observations with an Ensemble Four-Dimensional Variational (En4DVar) Hybrid Data Assimilation System. Remote Sens. 2023, 15, 3476. https://doi.org/10.3390/rs15143476
Zhu S, Wang B, Zhang L, Liu J, Liu Y, Gong J, Xu S, Wang Y, Huang W, Liu L, et al. Assimilating AMSU-A Radiance Observations with an Ensemble Four-Dimensional Variational (En4DVar) Hybrid Data Assimilation System. Remote Sensing. 2023; 15(14):3476. https://doi.org/10.3390/rs15143476
Chicago/Turabian StyleZhu, Shujun, Bin Wang, Lin Zhang, Juanjuan Liu, Yongzhu Liu, Jiandong Gong, Shiming Xu, Yong Wang, Wenyu Huang, Li Liu, and et al. 2023. "Assimilating AMSU-A Radiance Observations with an Ensemble Four-Dimensional Variational (En4DVar) Hybrid Data Assimilation System" Remote Sensing 15, no. 14: 3476. https://doi.org/10.3390/rs15143476