

Pilot Study of Low-Light Enhanced Terrain Mapping for Robotic Exploration in Lunar PSRs
Abstract
:1. Introduction
2. Related Works
2.1. Planetary Robotic Mapping Method
2.2. Low-Light Enhancement Method
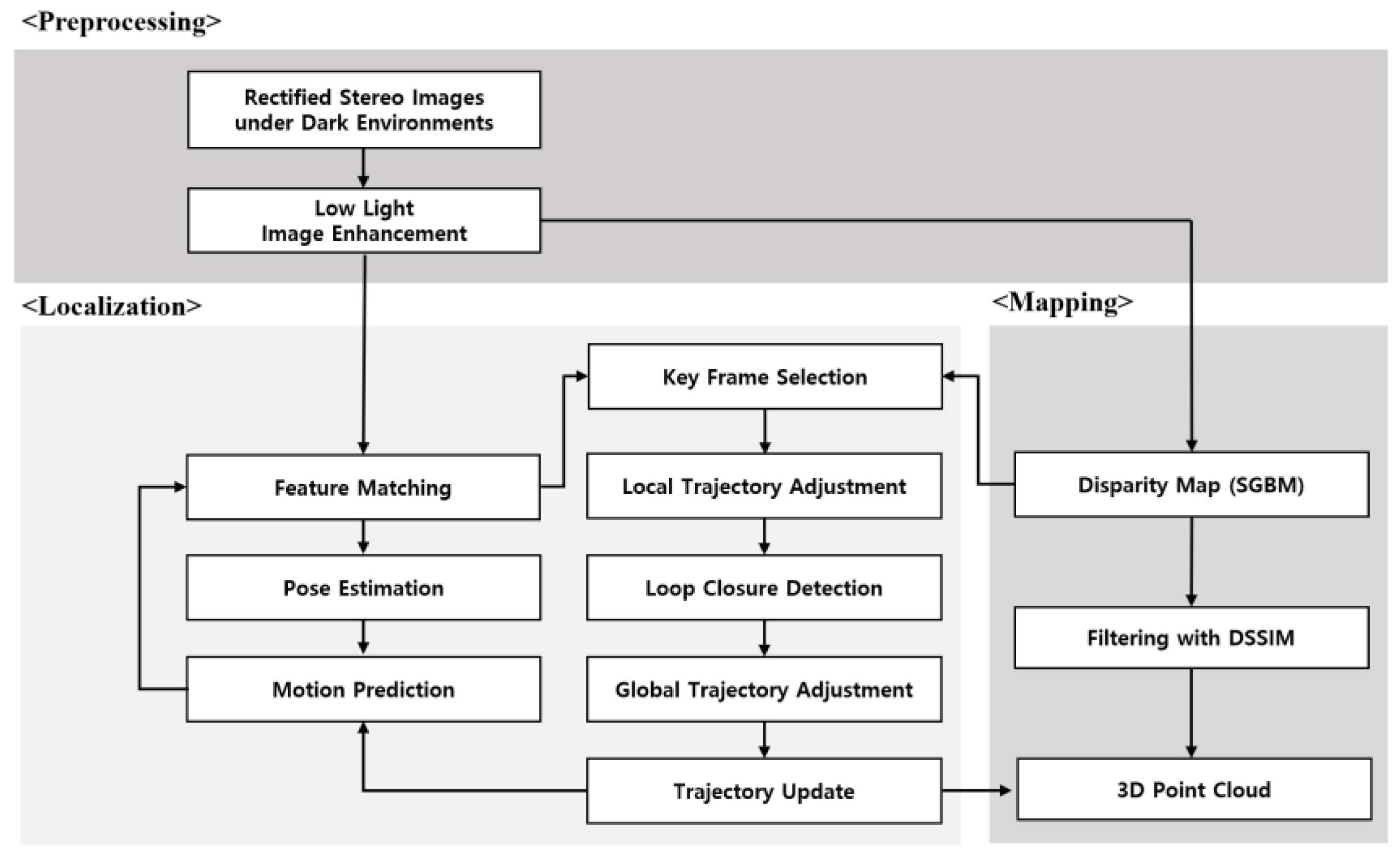
3. Methodology
3.1. Low-Light Enhanced Image for Dense Mapping
3.2. Low-Light Enhanced Image for Localization
4. Application and Results
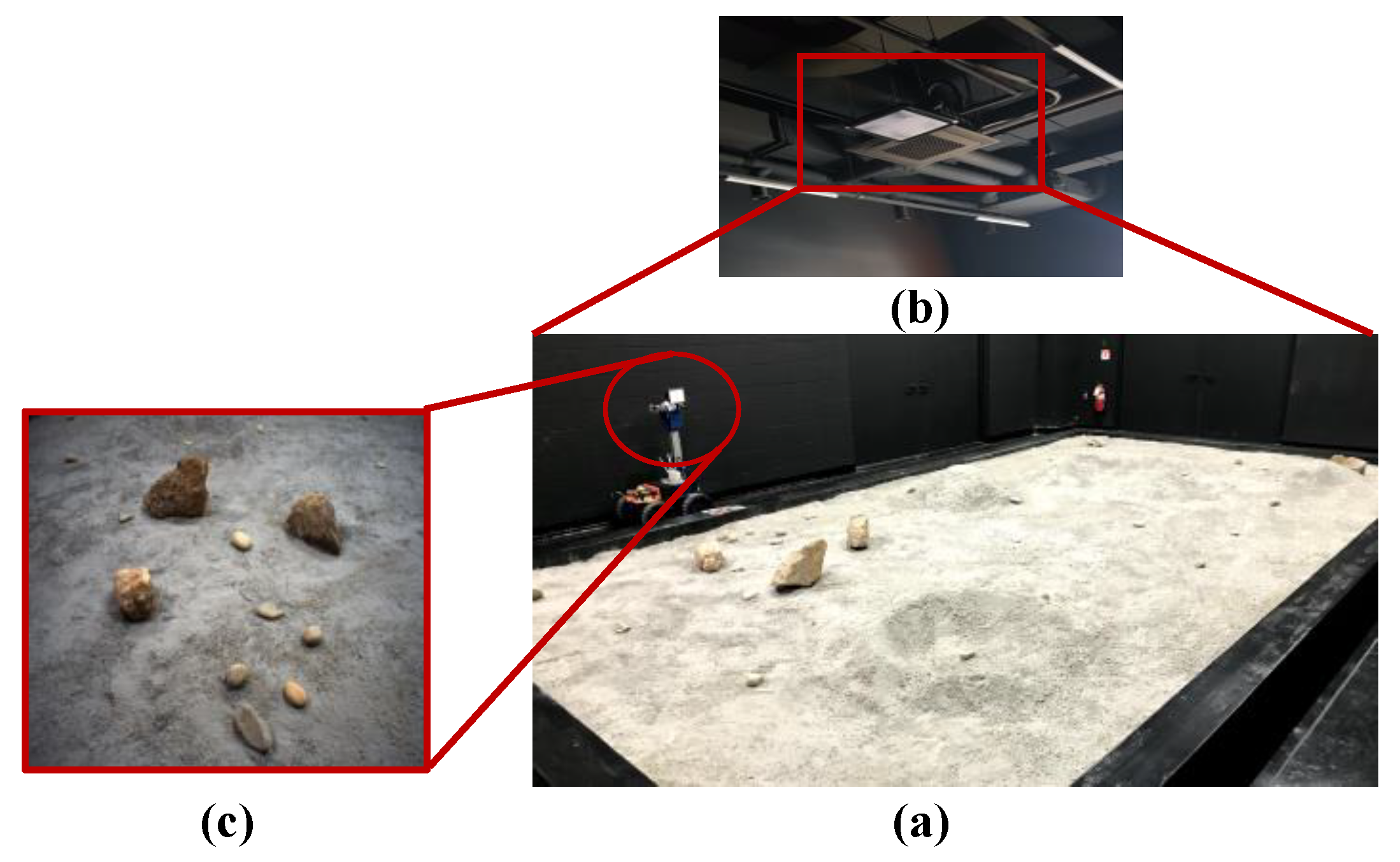
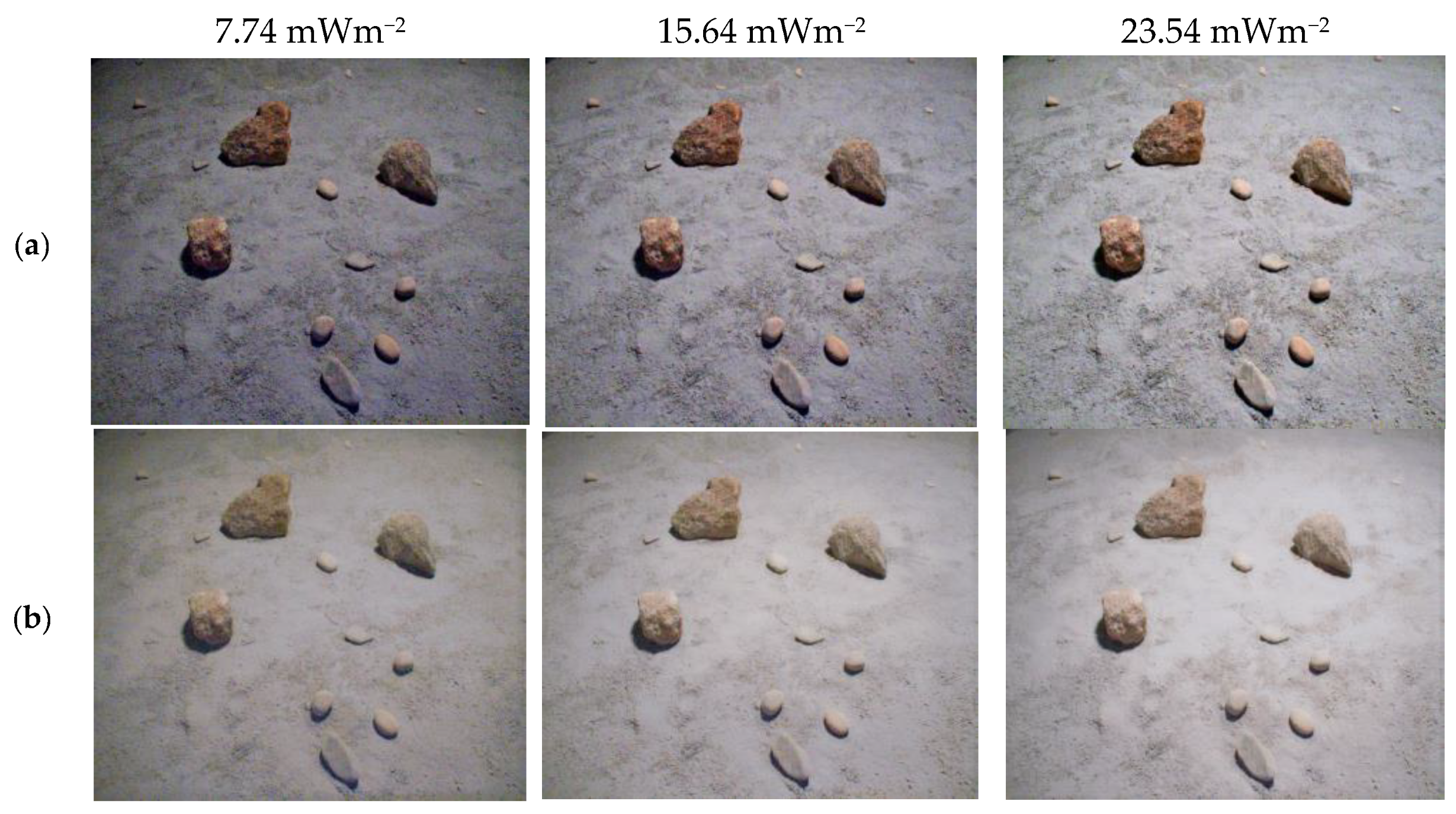
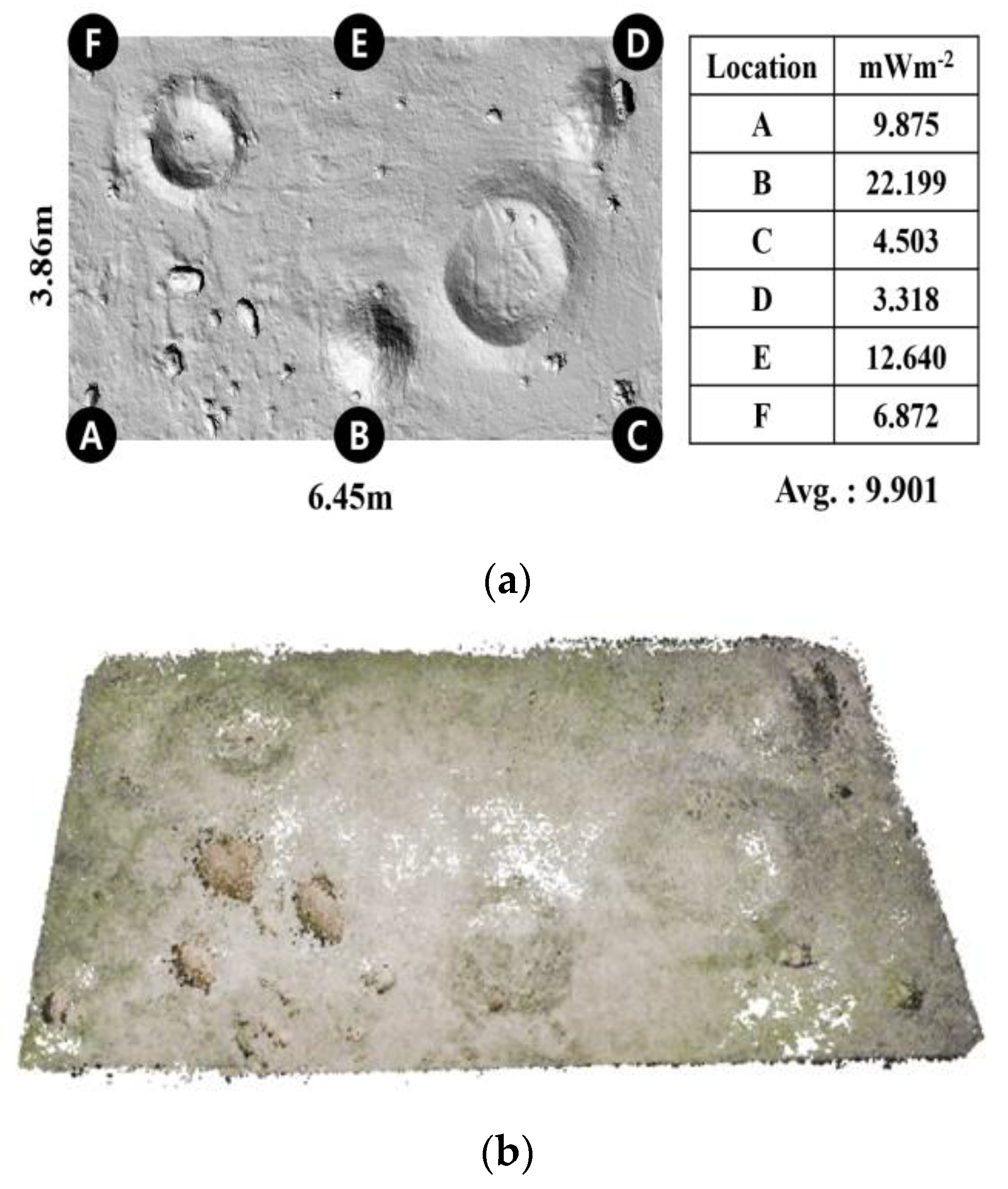
4.1. Test Environment
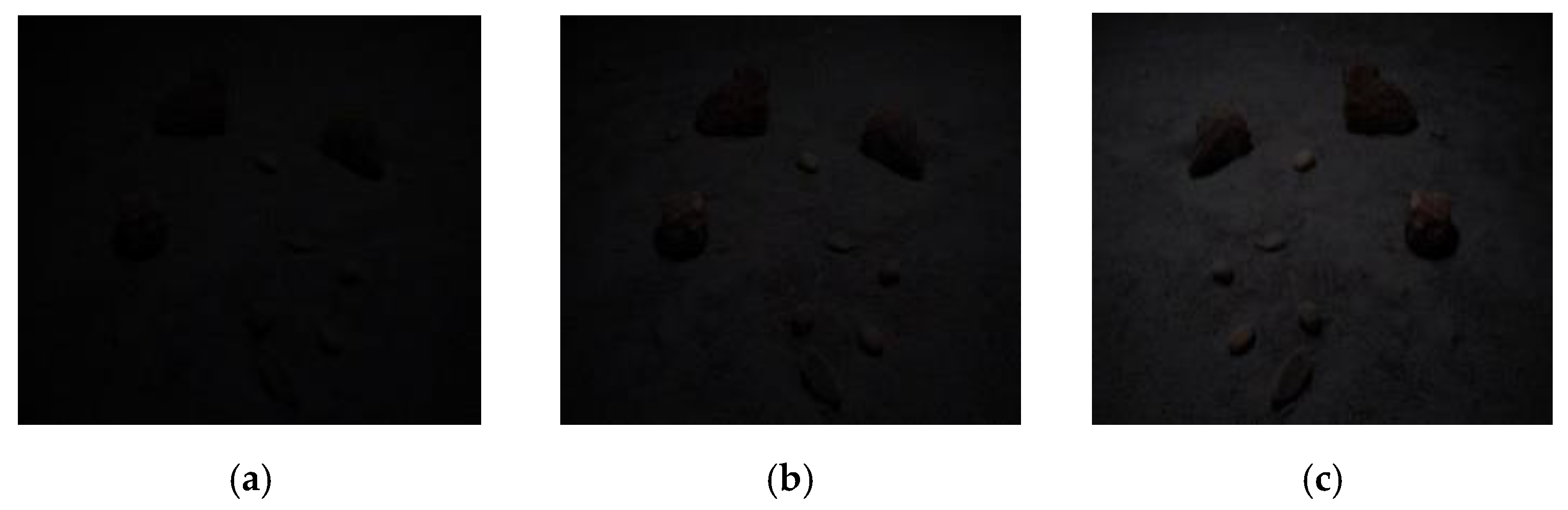
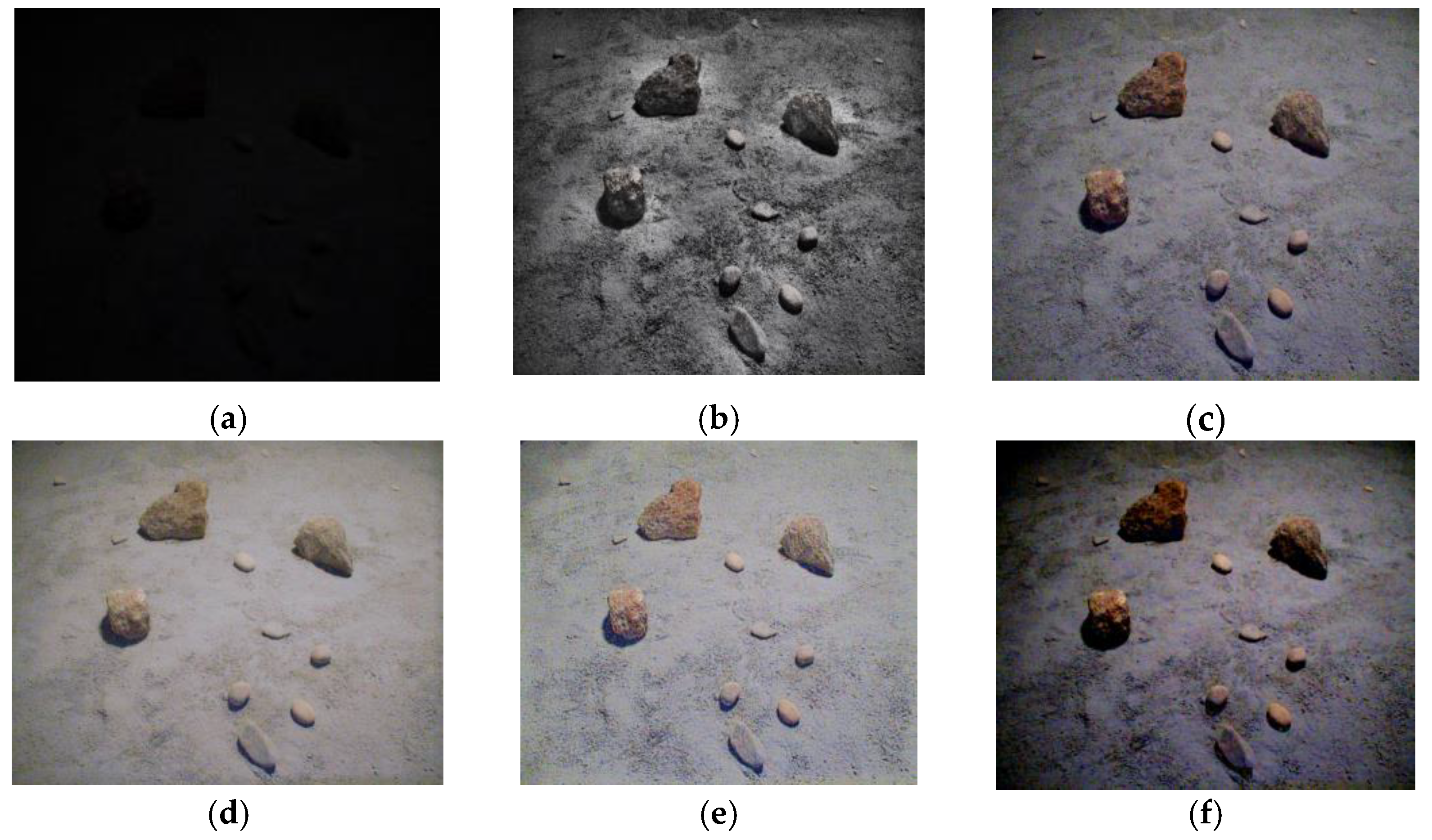
4.2. Experiments under Dark Illumination Conditions
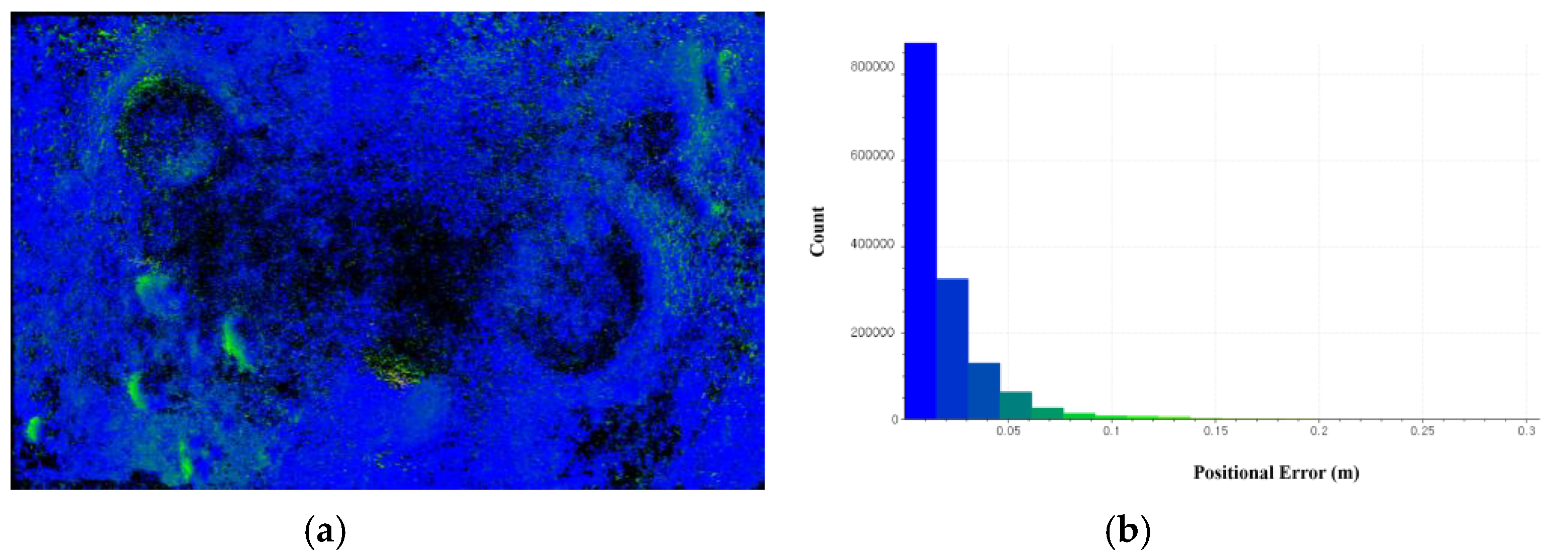
4.3. 3D Mapping Results
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- ISECG. Global Exploration Roadmap: Lunar Surface Exploration Scenario Update. 2020. Available online: https://www.globalspaceexploration.org/?p=1049 (accessed on 10 April 2023).
- Colaprete, A.; Elphic, R.; Shirley, M.; Ennico Smith, K.; Lim, D.; Siegler, M.; Mirmalek, Z.; Zacny, K.; Janine, C. The volatiles investigating polar exploration rover (VIPER) mission: Measurement goals and traverse planning. In Proceedings of the AGU Fall Meeting Abstracts, New Orleans, LA, USA, 13–17 December 2021; p. P53B-08. [Google Scholar]
- Smith, M.; Craig, D.; Herrmann, N.; Mahoney, E.; Krezel, J.; McIntyre, N.; Goodliff, K. The Artemis program: An overview of NASA’s activities to return humans to the moon. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–10. [Google Scholar]
- Casanova, S.; Espejel, C.; Dempster, A.G.; Anderson, R.C.; Caprarelli, G.; Saydam, S. Lunar polar water resource exploration–Examination of the lunar cold trap reservoir system model and introduction of play-based exploration (PBE) techniques. Planet. Space Sci. 2020, 180, 104742. [Google Scholar] [CrossRef]
- Hayne, P.O.; Hendrix, A.; Sefton-Nash, E.; Siegler, M.A.; Lucey, P.G.; Retherford, K.D.; Williams, J.-P.; Greenhagen, B.T.; Paige, D.A. Evidence for exposed water ice in the Moon’s south polar regions from Lunar Reconnaissance Orbiter ultraviolet albedo and temperature measurements. Icarus 2015, 255, 58–69. [Google Scholar] [CrossRef]
- Anand, M. Lunar water: A brief review. Earth Moon Planets 2010, 107, 65–73. [Google Scholar] [CrossRef]
- Anand, M.; Crawford, I.A.; Balat-Pichelin, M.; Abanades, S.; Van Westrenen, W.; Péraudeau, G.; Jaumann, R.; Seboldt, W. A brief review of chemical and mineralogical resources on the Moon and likely initial in situ resource utilization (ISRU) applications. Planet. Space Sci. 2012, 74, 42–48. [Google Scholar] [CrossRef]
- Schlüter, L.; Cowley, A. Review of techniques for In-Situ oxygen extraction on the moon. Planet. Space Sci. 2020, 181, 104753. [Google Scholar] [CrossRef]
- Lemelin, M.; Li, S.; Mazarico, E.; Siegler, M.A.; Kring, D.A.; Paige, D.A. Framework for coordinated efforts in the exploration of volatiles in the south polar region of the moon. Planet. Sci. J. 2021, 2, 103. [Google Scholar] [CrossRef]
- Bickel, V.T.; Moseley, B.; Lopez-Francos, I.; Shirley, M. Peering into lunar permanently shadowed regions with deep learning. Nat. Commun. 2021, 12, 5607. [Google Scholar] [CrossRef]
- Rew, D.-Y.; Ju, G.-H.; Kang, S.-W.; Lee, S.-R. Conceptual design of Korea Aerospace Research Institute lunar explorer dynamic simulator. J. Astron. Space Sci. 2010, 27, 377–382. [Google Scholar] [CrossRef] [Green Version]
- Austin, A.; Sherwood, B.; Elliott, J.; Colaprete, A.; Zacny, K.; Metzger, P.; Sims, M.; Schmitt, H.; Magnus, S.; Fong, T. Robotic lunar surface operations 2. Acta Astronaut. 2020, 176, 424–437. [Google Scholar] [CrossRef]
- Hong, S.; Bangunharcana, A.; Park, J.-M.; Choi, M.; Shin, H.-S. Visual SLAM-based robotic mapping method for planetary construction. Sensors 2021, 21, 7715. [Google Scholar] [CrossRef]
- Cahill, S.A. Lunar Terrain Vehicle (LTV): Center Capabilities: Silicon Valley NASA Ames Research Center; INASA Ames Research Center: Mountain View, CA, USA, 2021. [Google Scholar]
- Tong, C.H.; Barfoot, T.D.; Dupuis, É. Three-dimensional SLAM for mapping planetary work site environments. J. Field Robot. 2012, 29, 381–412. [Google Scholar] [CrossRef]
- Schuster, M.J.; Brunner, S.G.; Bussmann, K.; Büttner, S.; Dömel, A.; Hellerer, M.; Lehner, H.; Lehner, P.; Porges, O.; Reill, J. Towards autonomous planetary exploration. J. Intell. Robot. Syst. 2019, 93, 461–494. [Google Scholar] [CrossRef] [Green Version]
- Ip, W.-H.; Yan, J.; Li, C.-L.; Ouyang, Z.-Y. Preface: The Chang’e-3 lander and rover mission to the Moon. Res. Astron. Astrophys. 2014, 14, 1511. [Google Scholar] [CrossRef]
- Li, C.; Zuo, W.; Wen, W.; Zeng, X.; Gao, X.; Liu, Y.; Fu, Q.; Zhang, Z.; Su, Y.; Ren, X. Overview of the Chang’e-4 mission: Opening the frontier of scientific exploration of the lunar far side. Space Sci. Rev. 2021, 217, 35. [Google Scholar] [CrossRef]
- Bajracharya, M.; Maimone, M.W.; Helmick, D. Autonomy for mars rovers: Past, present, and future. Computer 2008, 41, 44–50. [Google Scholar] [CrossRef] [Green Version]
- Smith, K.E.; Colaprete, A.; Lim, D.; Andrews, D. The VIPER Mission, a Resource-Mapping Mission on Another Celestial Body. In Proceedings of the SRR XXII MEETING Colorado School of Mines, Golden, CO, USA, 7–10 June 2022. [Google Scholar]
- Kloos, J.L.; Moores, J.E.; Godin, P.J.; Cloutis, E. Illumination conditions within permanently shadowed regions at the lunar poles: Implications for in-situ passive remote sensing. Acta Astronaut. 2021, 178, 432–451. [Google Scholar] [CrossRef]
- Mahanti, P.; Thompson, T.J.; Robinson, M.S.; Humm, D.C. View Factor-Based Computation of Secondary Illumination Within Lunar Permanently Shadowed Regions. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8027004. [Google Scholar] [CrossRef]
- Mazarico, E.; Neumann, G.; Smith, D.; Zuber, M.; Torrence, M. Illumination conditions of the lunar polar regions using LOLA topography. Icarus 2011, 211, 1066–1081. [Google Scholar] [CrossRef]
- Gläser, P.; Oberst, J.; Neumann, G.; Mazarico, E.; Speyerer, E.; Robinson, M. Illumination conditions at the lunar poles: Implications for future exploration. Planet. Space Sci. 2018, 162, 170–178. [Google Scholar] [CrossRef] [Green Version]
- Wei, G.; Li, X.; Zhang, W.; Tian, Y.; Jiang, S.; Wang, C.; Ma, J. Illumination conditions near the Moon’s south pole: Implication for a concept design of China’s Chang’E− 7 lunar polar exploration. Acta Astronaut. 2023, 208, 74–81. [Google Scholar] [CrossRef]
- Arizona State University. ShadowCam. Available online: http://shadowcam.sese.asu.edu/ (accessed on 1 April 2023).
- Brown, H.; Boyd, A.; Denevi, B.; Henriksen, M.; Manheim, M.; Robinson, M.; Speyerer, E.; Wagner, R. Resource potential of lunar permanently shadowed regions. Icarus 2022, 377, 114874. [Google Scholar] [CrossRef]
- Golombek, M.; Anderson, R.; Barnes, J.R.; Bell III, J.; Bridges, N.; Britt, D.; Brückner, J.; Cook, R.; Crisp, D.; Crisp, J. Overview of the Mars Pathfinder Mission: Launch through landing, surface operations, data sets, and science results. J. Geophys. Res. Planets 1999, 104, 8523–8553. [Google Scholar] [CrossRef] [Green Version]
- Maimone, M.; Cheng, Y.; Matthies, L. Two years of visual odometry on the mars exploration rovers. J. Field Robot. 2007, 24, 169–186. [Google Scholar] [CrossRef] [Green Version]
- Rankin, A.; Maimone, M.; Biesiadecki, J.; Patel, N.; Levine, D.; Toupet, O. Driving curiosity: Mars rover mobility trends during the first seven years. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–19. [Google Scholar]
- Di, K.; Liu, Z.; Wan, W.; Peng, M.; Liu, B.; Wang, Y.; Gou, S.; Yue, Z. Geospatial technologies for Chang’e-3 and Chang’e-4 lunar rover missions. Geo-Spat. Inf. Sci. 2020, 23, 87–97. [Google Scholar] [CrossRef]
- Wong, C.; Yang, E.; Yan, X.-T.; Gu, D. Adaptive and intelligent navigation of autonomous planetary rovers—A survey. In Proceedings of the 2017 NASA/ESA Conference on Adaptive Hardware and Systems (AHS), Pasadena, CA, USA, 24–27 July 2017; pp. 237–244. [Google Scholar]
- Hidalgo-Carrió, J.; Poulakis, P.; Kirchner, F. Adaptive localization and mapping with application to planetary rovers. J. Field Robot. 2018, 35, 961–987. [Google Scholar] [CrossRef]
- Jia, Y.; Liu, L.; Wang, X.; Guo, N.; Wan, G. Selection of Lunar South Pole Landing Site Based on Constructing and Analyzing Fuzzy Cognitive Maps. Remote Sens. 2022, 14, 4863. [Google Scholar] [CrossRef]
- Bajpai, A.; Burroughes, G.; Shaukat, A.; Gao, Y. Planetary monocular simultaneous localization and mapping. J. Field Robot. 2016, 33, 229–242. [Google Scholar] [CrossRef]
- Tseng, K.-K.; Li, J.; Chang, Y.; Yung, K.; Chan, C.; Hsu, C.-Y. A new architecture for simultaneous localization and mapping: An application of a planetary rover. Enterp. Inf. Syst. 2019, 15, 1162–1178. [Google Scholar] [CrossRef]
- Peng, M.; Wan, W.; Xing, Y.; Wang, Y.; Liu, Z.; Di, K.; Zhao, Q.; Teng, B.; Mao, X. Integrating Depth and Image Sequences for Planetary Rover Mapping Using Rgb-D Sensor. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1369–1374. [Google Scholar] [CrossRef] [Green Version]
- Di, K.; Zhao, Q.; Wan, W.; Wang, Y.; Gao, Y. RGB-D SLAM based on extended bundle adjustment with 2D and 3D information. Sensors 2016, 16, 1285. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X. A young multilayered terrane of the northern Mare Imbrium revealed by Chang’E-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Di, K.; Zhu, M.H.; Yue, Z.; Lin, Y.; Wan, W.; Liu, Z.; Gou, S.; Liu, B.; Peng, M.; Wang, Y. Topographic evolution of Von Kármán crater revealed by the lunar rover Yutu-2. Geophys. Res. Lett. 2019, 46, 12764–12770. [Google Scholar] [CrossRef]
- Kwan, C.; Chou, B.; Ayhan, B. Enhancing Stereo Image Formation and Depth Map Estimation for Mastcam Images. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 566–572. [Google Scholar]
- Maki, J.; Gruel, D.; McKinney, C.; Ravine, M.; Morales, M.; Lee, D.; Willson, R.; Copley-Woods, D.; Valvo, M.; Goodsall, T. The Mars 2020 Engineering Cameras and Microphone on the Perseverance Rover: A Next-Generation Imaging System for Mars Exploration. Space Sci. Rev. 2020, 216, 137. [Google Scholar] [CrossRef]
- Zuiderveld, K. Contrast limited adaptive histogram equalization. In Graphics Gems IV; Heckbert, P., Ed.; Academic Press: San Diego, CA, USA, 1994; pp. 474–485. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar] [PubMed]
- Jobson, D.J.; Rahman, Z.; Woodell, G.A. Properties and performance of a center/surround retinex. IEEE Trans. Image Process. 1997, 6, 451–462. [Google Scholar] [CrossRef] [PubMed]
- Jobson, D.J.; Rahman, Z.; Woodell, G.A. A multiscale retinex for bridging the gap between color images and the human observation of scenes. IEEE Trans. Image Process. 1997, 6, 965–976. [Google Scholar] [CrossRef] [Green Version]
- Land, E.H. The retinex theory of color vision. Sci. Am. 1977, 237, 108–129. [Google Scholar] [CrossRef]
- Wang, W.; Wei, C.; Yang, W.; Liu, J. Gladnet: Low-light enhancement network with global awareness. In Proceedings of the 2018 13th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2018), Xi’an, China, 15–19 May 2018; pp. 751–755. [Google Scholar]
- Lv, F.; Lu, F.; Wu, J.; Lim, C. MBLLEN: Low-Light Image/Video Enhancement Using CNNs. In Proceedings of the BMVC, Newcastle, UK, 3–6 September 2018; p. 4. [Google Scholar]
- Zhang, Y.; Zhang, J.; Guo, X. Kindling the darkness: A practical low-light image enhancer. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 1632–1640. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef]
- Loza, A.; Mihaylova, L.; Canagarajah, N.; Bull, D. Structural similarity-based object tracking in video sequences. In Proceedings of the 2006 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; pp. 1–6. [Google Scholar]
- Pire, T.; Fischer, T.; Castro, G.; De Cristóforis, P.; Civera, J.; Berlles, J.J. S-PTAM: Stereo parallel tracking and mapping. Robot. Auton. Syst. 2017, 93, 27–42. [Google Scholar] [CrossRef] [Green Version]
- Park, J.-M.; Hong, S.; Shin, H.-S. Experiment on Low Light Image Enhancement and Feature Extraction Methods for Rover Exploration in Lunar Permanently Shadowed Region. KSCE J. Civ. Environ. Eng. Res. 2022, 42, 741–749. [Google Scholar]
- Gálvez-López, D.; Tardos, J.D. Bags of binary words for fast place recognition in image sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Ryu, B.-H.; Wang, C.-C.; Chang, I. Development and geotechnical engineering properties of KLS-1 lunar simulant. J. Aerosp. Eng. 2018, 31, 04017083. [Google Scholar] [CrossRef] [Green Version]
- Wei, C.; Wang, W.; Yang, W.; Liu, J. Deep retinex decomposition for low-light enhancement. arXiv 2018, arXiv:1808.04560. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LLIE | PSNR (dB) | SSIM | Delta-E |
|---|---|---|---|
| Low-Light Image | 7.48 | 0.16 | 45.68 |
| CLAHE | 14.86 | 0.29 | 17.57 |
| Dehaze | 19.12 | 0.36 | 16.61 |
| GladNet | 19.70 | 0.45 | 12.38 |
| KIND | 16.59 | 0.38 | 17.41 |
| MBLLEN | 14.96 | 0.38 | 22.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.-M.; Hong, S.; Shin, H.-S. Pilot Study of Low-Light Enhanced Terrain Mapping for Robotic Exploration in Lunar PSRs. Remote Sens. 2023, 15, 3412. https://doi.org/10.3390/rs15133412
Park J-M, Hong S, Shin H-S. Pilot Study of Low-Light Enhanced Terrain Mapping for Robotic Exploration in Lunar PSRs. Remote Sensing. 2023; 15(13):3412. https://doi.org/10.3390/rs15133412
Chicago/Turabian StylePark, Jae-Min, Sungchul Hong, and Hyu-Soung Shin. 2023. "Pilot Study of Low-Light Enhanced Terrain Mapping for Robotic Exploration in Lunar PSRs" Remote Sensing 15, no. 13: 3412. https://doi.org/10.3390/rs15133412