
Cotton Seedling Detection and Counting Based on UAV Multispectral Images and Deep Learning Methods

Abstract
:1. Introduction
2. Materials and Methods
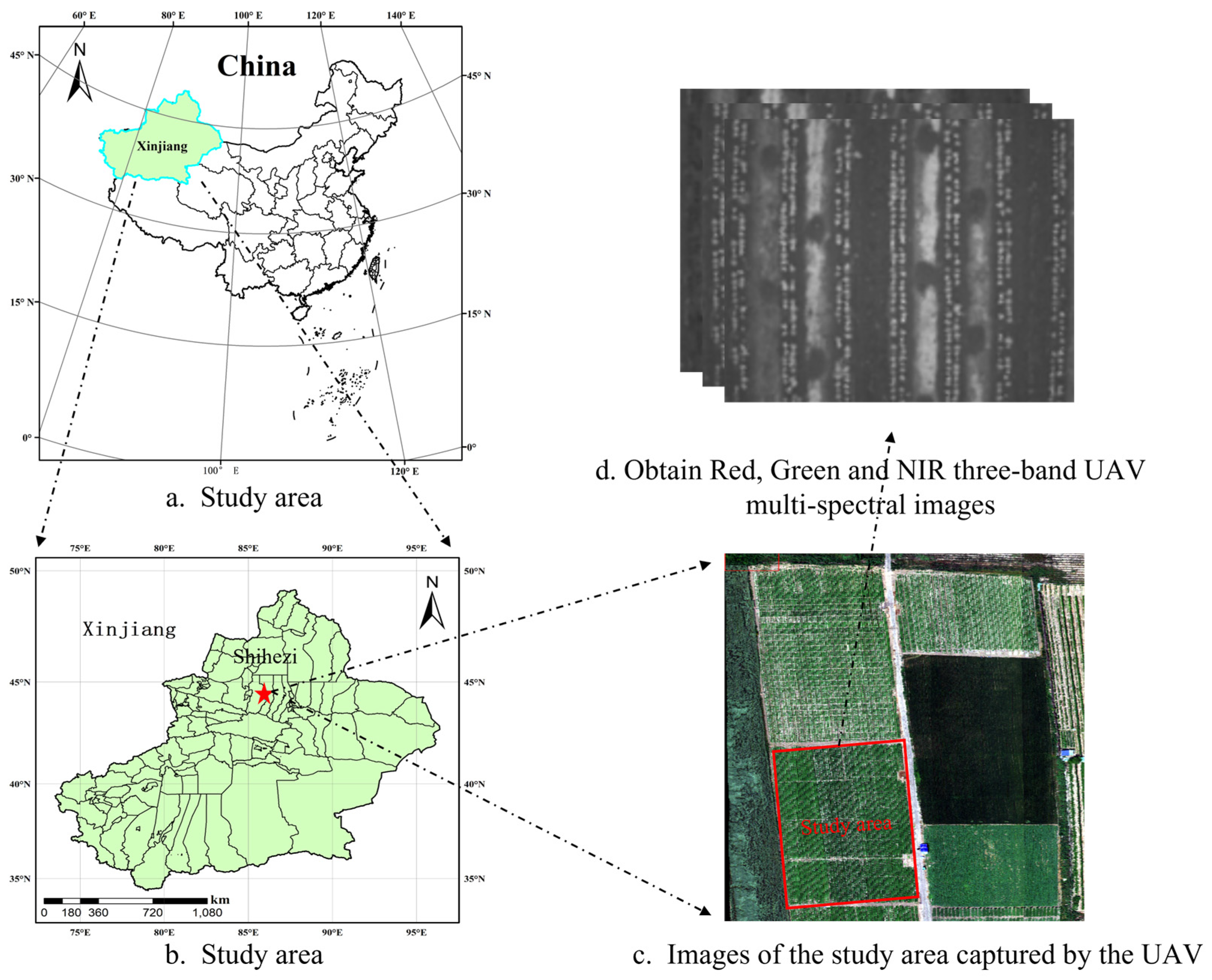
2.1. Experimental Sites
2.2. Data Collection
2.2.1. Ground Data Acquisition
2.2.2. UAV Image Acquisition
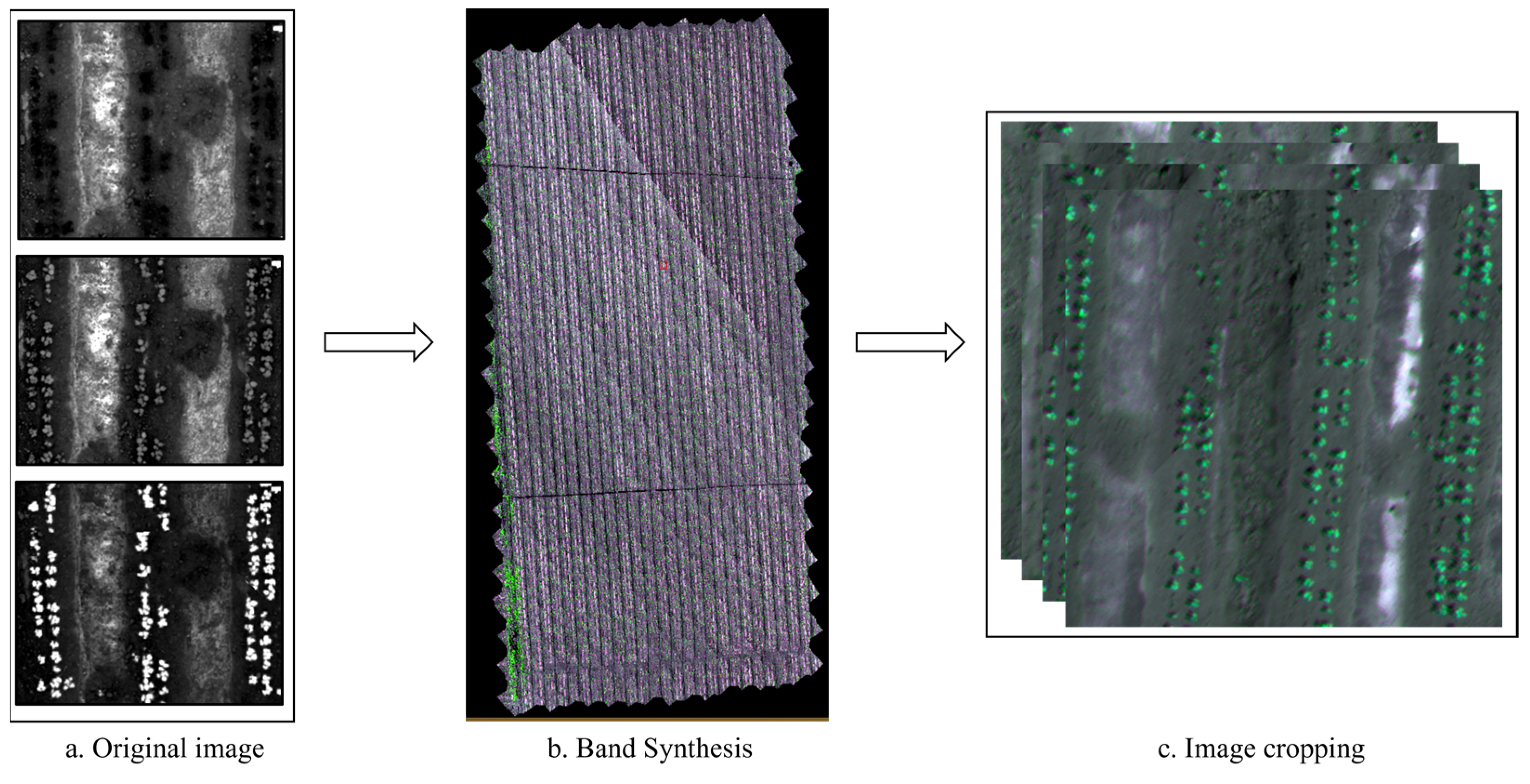
2.3. Image Processing
2.4. Dataset Creation
2.5. Deep Learning Models
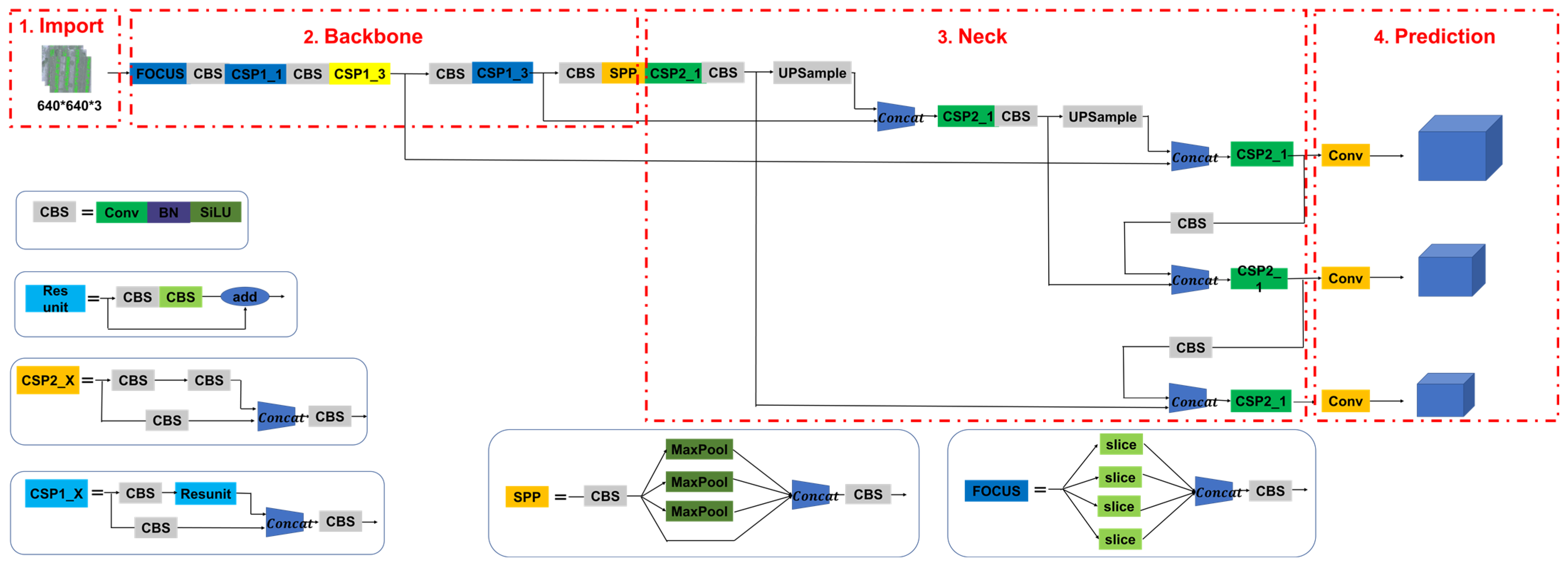
2.5.1. YOLOv5
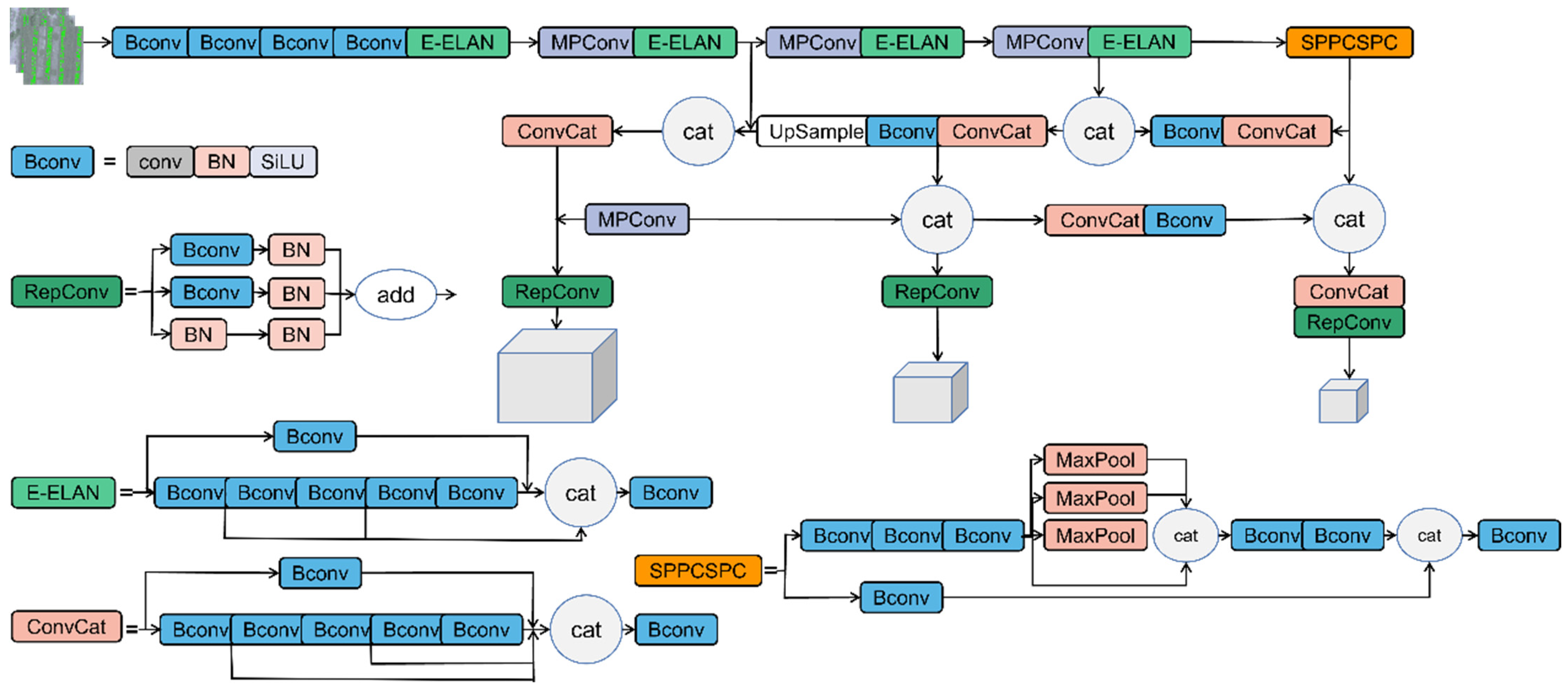
2.5.2. YOLOv7
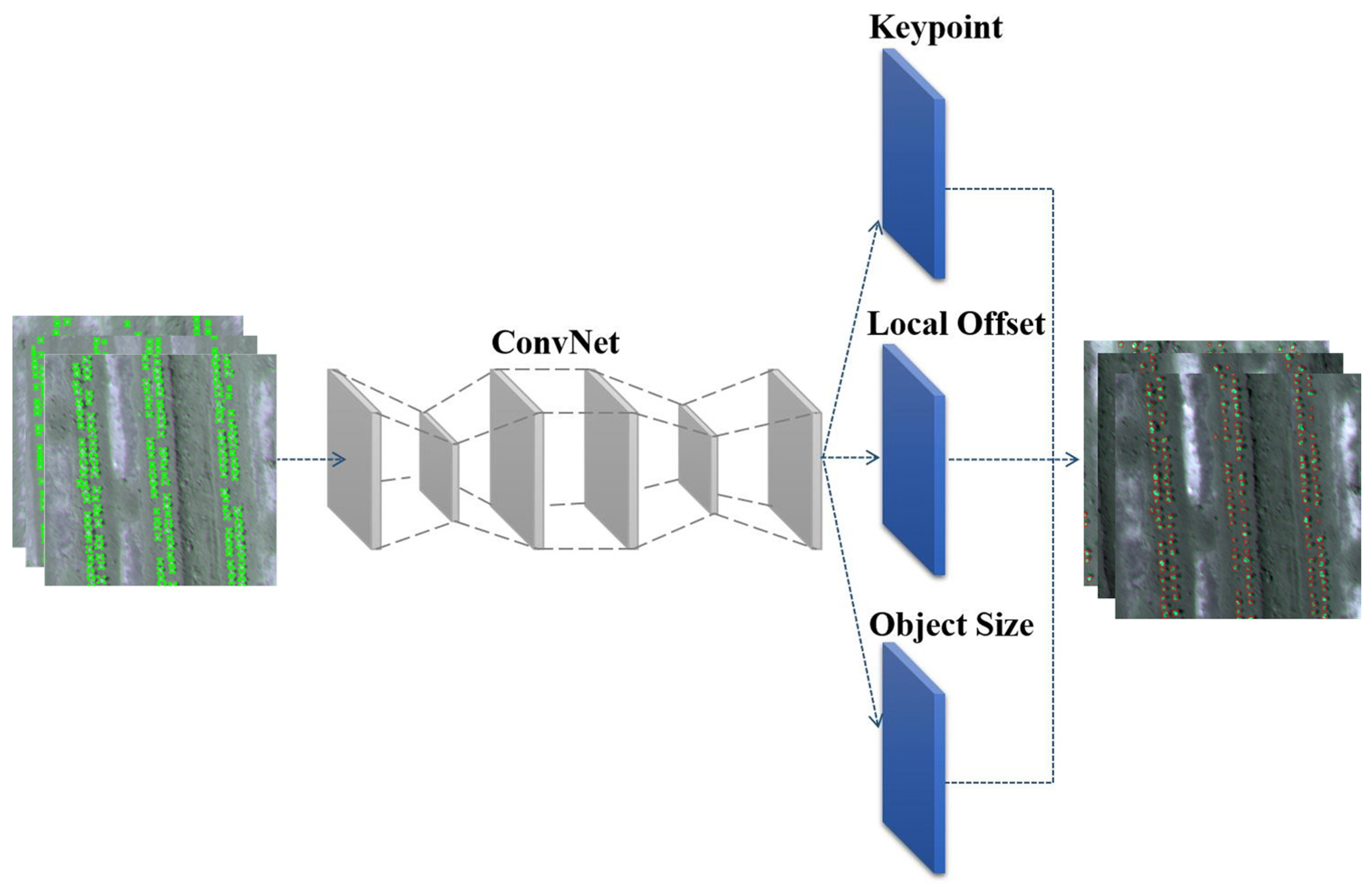
2.5.3. CenterNet
2.6. Precision Validation
3. Results
3.1. Model Validation
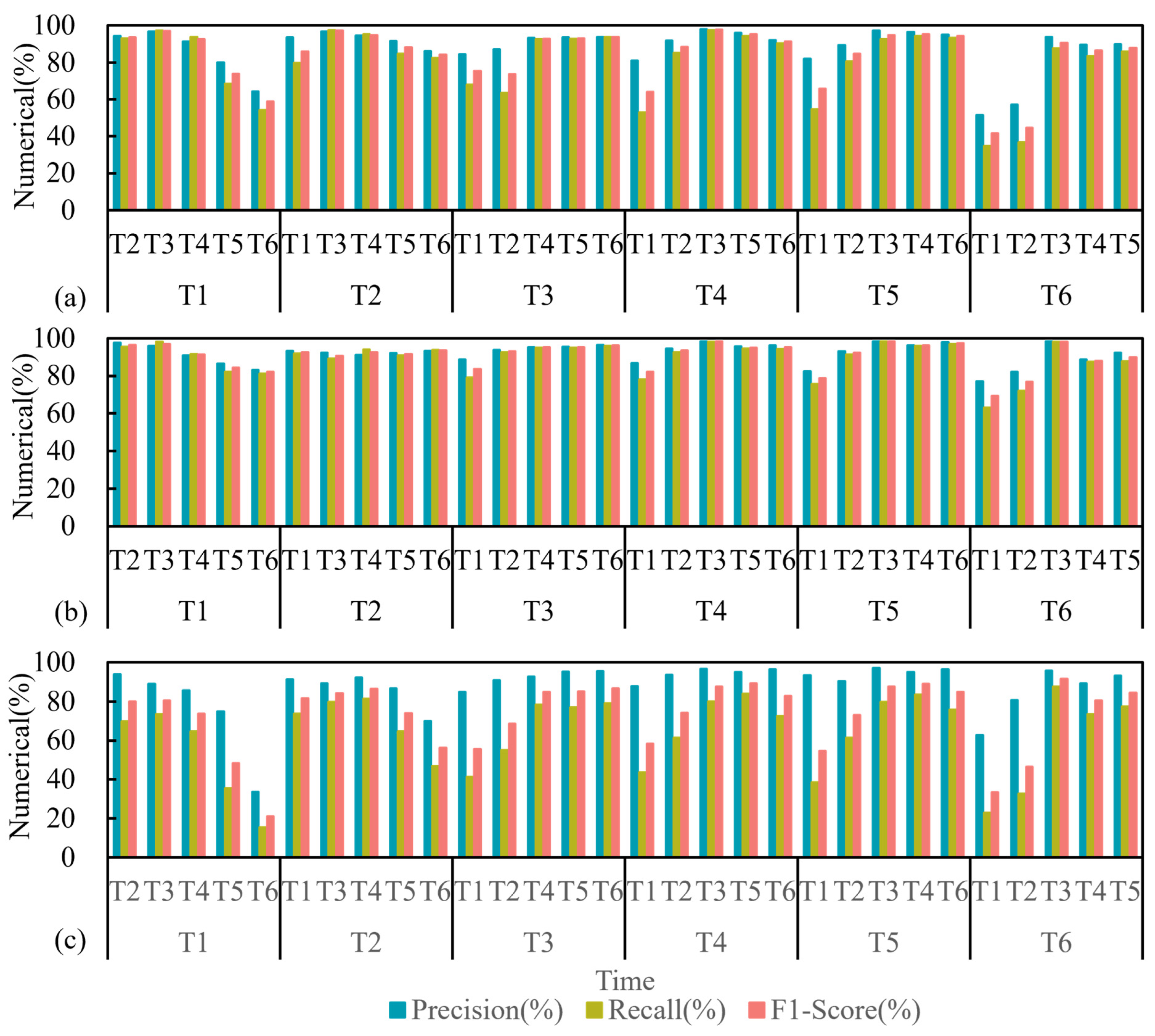
3.1.1. Model Training and Verification Test Results
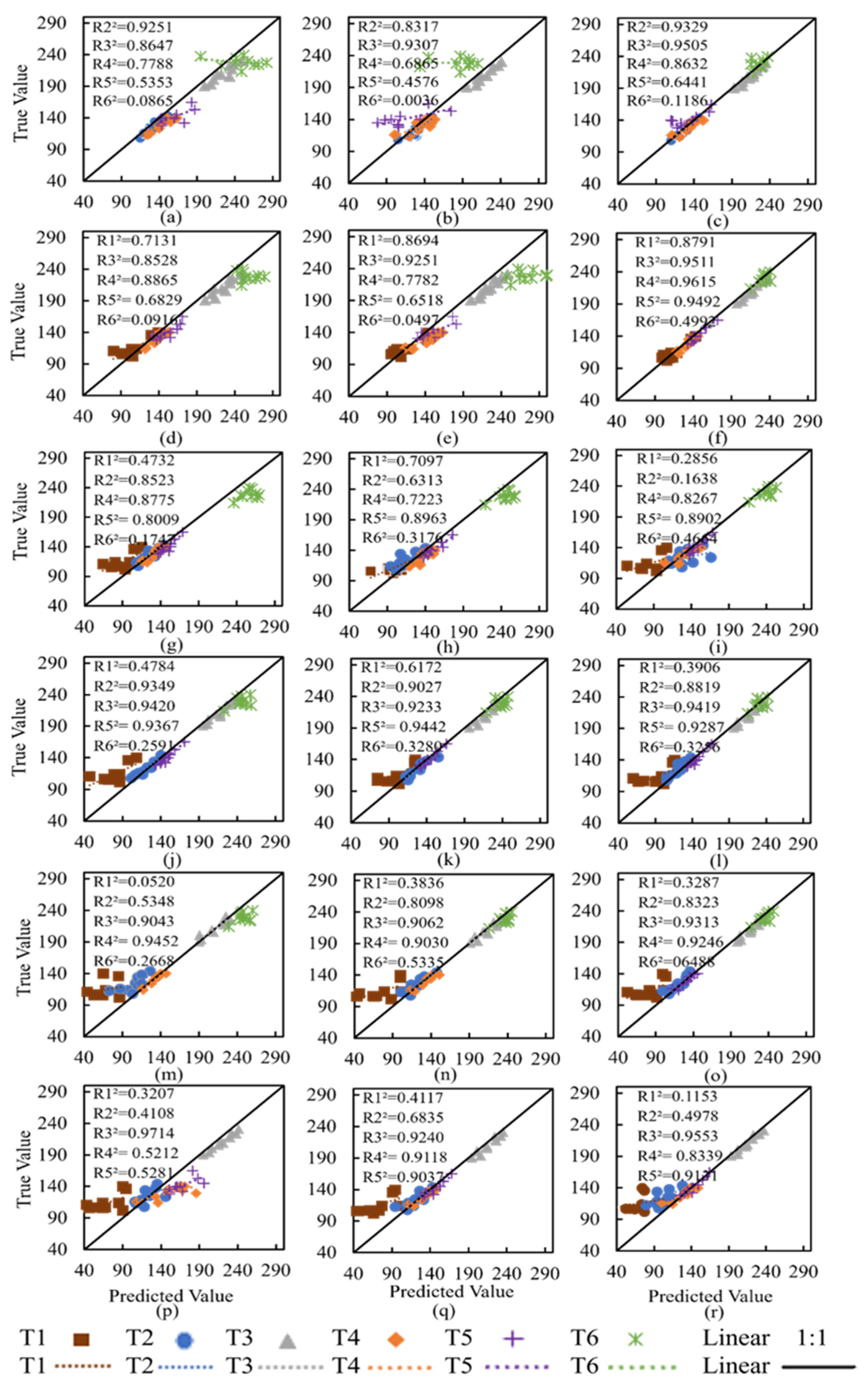
3.1.2. Model Training and Verification of Counting Results
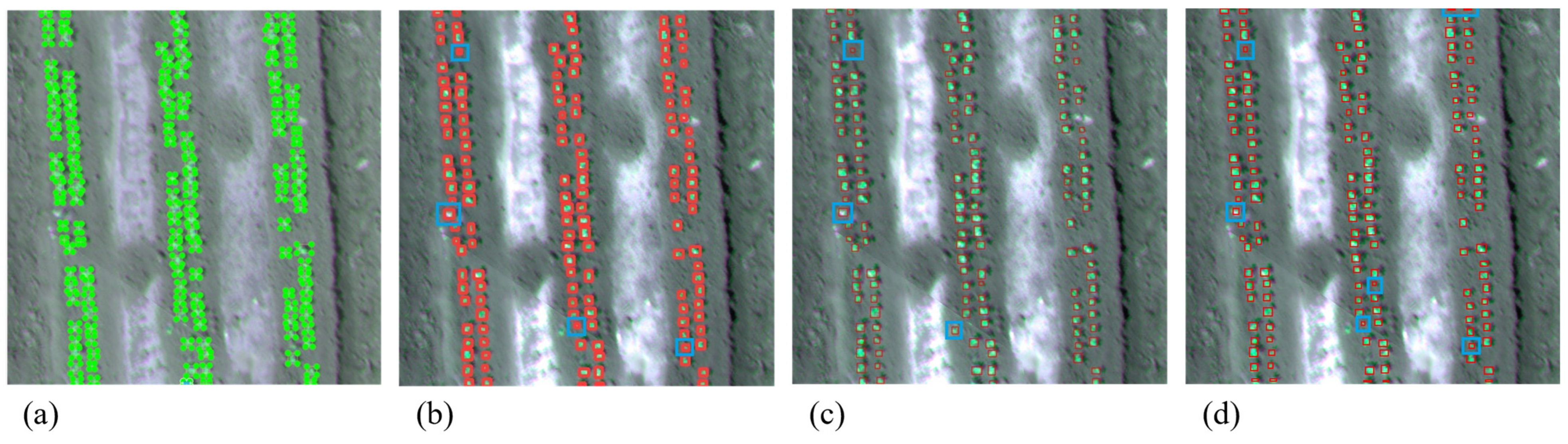
3.2. Model Test Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mavridou, E.; Vrochidou, E.; Papakostas, G.A.; Pachidis, T.; Kaburlasos, V.G. Machine Vision Systems in Precision Agriculture for Crop Farming. J. Imaging 2019, 5, 89. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Paterson, A.H.; Chee, P.W.; Robertson, J.S. Image Processing Algorithms for Infield Single Cotton Boll Counting and Yield Prediction. Comput. Electron. Agric. 2019, 166, 104976. [Google Scholar] [CrossRef]
- Kitano, B.T.; Mendes, C.C.T.; Geus, A.R.; Oliveira, H.C.; Souza, J.R. Corn Plant Counting Using Deep Learning and UAV Images. IEEE Geosci. Remote Sens. Lett. 2019, 1–5. [Google Scholar] [CrossRef]
- Oliveira, H.; Guizilini, V.; Nunes, I.; Souza, J. Failure Detection in Row Crops from UAV Images Using Morphological Operators. IEEE Geosci. Remote Sens. Lett. 2018, 15, 991–995. [Google Scholar] [CrossRef]
- Verger, A.; Vigneau, N.; Chéron, C.; Gilliot, J.-M.; Comar, A.; Baret, F. Green Area Index from an Unmanned Aerial System over Wheat and Rapeseed Crops. Remote Sens. Environ. 2014, 152, 654–664. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Shirzadifar, A.; Maharlooei, M.; Bajwa, S.G.; Oduor, P.G.; Nowatzki, J.F. Mapping Crop Stand Count and Planting Uniformity Using High Resolution Imagery in a Maize Crop. Biosyst. Eng. 2020, 200, 377–390. [Google Scholar] [CrossRef]
- Vong, C.N.; Conway, L.S.; Zhou, J.; Kitchen, N.R.; Sudduth, K.A. Early Corn Stand Count of Different Cropping Systems Using UAV-Imagery and Deep Learning. Comput. Electron. Agric. 2021, 186, 106214. [Google Scholar] [CrossRef]
- Lin, Z.; Guo, W. Cotton Stand Counting from Unmanned Aerial System Imagery Using MobileNet and CenterNet Deep Learning Models. Remote Sens. 2021, 13, 2822. [Google Scholar] [CrossRef]
- Yang, H.; Chang, F.; Huang, Y.; Xu, M.; Zhao, Y.; Ma, L.; Su, H. Multi-Object Tracking Using Deep SORT and Modified CenterNet in Cotton Seedling Counting. Comput. Electron. Agric. 2022, 202, 107339. [Google Scholar] [CrossRef]
- Wu, W.; Liu, T.; Zhou, P.; Yang, T.; Li, C.; Zhong, X.; Sun, C.; Liu, S.; Guo, W. Image Analysis-Based Recognition and Quantification of Grain Number per Panicle in Rice. Plant Methods 2019, 15, 122. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Yang, G.; Yang, X.; Xu, B.; Han, L.; Zhu, Y. Automatic Counting of in Situ Rice Seedlings from UAV Images Based on a Deep Fully Convolutional Neural Network. Remote Sens. 2019, 11, 691. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Jin, L.; Liu, J. The Estimation of Crop Emergence in Potatoes by UAV RGB Imagery. Plant Methods 2019, 15, 15. [Google Scholar] [CrossRef] [PubMed]
- Schirrmann, M.; Giebel, A.; Gleiniger, F.; Pflanz, M.; Lentschke, J.; Dammer, K.-H. Monitoring Agronomic Parameters of Winter Wheat Crops with Low-Cost UAV Imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef]
- Maresma, Á.; Ariza, M.; Martínez, E.; Lloveras, J.; Martínez-Casasnovas, J.A. Analysis of Vegetation Indices to Determine Nitrogen Application and Yield Prediction in Maize (Zea Mays L.) from a Standard UAV Service. Remote Sens. 2016, 8, 973. [Google Scholar] [CrossRef]
- Bai, Y.; Nie, C.; Wang, H.; Cheng, M.; Liu, S.; Yu, X.; Shao, M.; Wang, Z.; Wang, S.; Tuohuti, N.; et al. A Fast and Robust Method for Plant Count in Sunflower and Maize at Different Seedling Stages Using High-Resolution UAV RGB Imagery. Precis. Agric. 2022, 23, 1720–1742. [Google Scholar] [CrossRef]
- Walter, A.; Liebisch, F.; Hund, A. Plant Phenotyping: From Bean Weighing to Image Analysis. Plant Methods 2015, 11, 14. [Google Scholar] [CrossRef]
- Feng, A.; Zhou, J.; Vories, E.; Sudduth, K.A. Evaluation of Cotton Emergence Using UAV-Based Imagery and Deep Learning. Comput. Electron. Agric. 2020, 177, 105711. [Google Scholar] [CrossRef]
- Teixeira Crusiol, L.G.; Nanni, M.R.; Furlanetto, R.H.; Cezar, E.; Silva, G.F.C. Reflectance Calibration of UAV-Based Visible and near-Infrared Digital Images Acquired under Variant Altitude and Illumination Conditions. Remote Sens. Appl. Soc. Environ. 2020, 18, 100312. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Senecal, J.J.; Sheppard, J.W.; Shaw, J.A. Efficient Convolutional Neural Networks for Multi-Spectral Image Classification. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]
- Su, H.; Jung, C.; Yu, L. Multi-Spectral Fusion and Denoising of Color and Near-Infrared Images Using Multi-Scale Wavelet Analysis. Sensors 2021, 21, 3610. [Google Scholar] [CrossRef]
- Lin, Z.; Guo, W. Sorghum Panicle Detection and Counting Using Unmanned Aerial System Images and Deep Learning. Front. Plant Sci. 2020, 11, 534853. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Spangenberg, G.; Kant, S. Fusion of Spectral and Structural Information from Aerial Images for Improved Biomass Estimation. Remote Sens. 2020, 12, 3164. [Google Scholar] [CrossRef]
- Berger, K.; Machwitz, M.; Kycko, M.; Kefauver, S.C.; Van Wittenberghe, S.; Gerhards, M.; Verrelst, J.; Atzberger, C.; van der Tol, C.; Damm, A.; et al. Multi-Sensor Spectral Synergies for Crop Stress Detection and Monitoring in the Optical Domain: A Review. Remote Sens. Environ. 2022, 280, 113198. [Google Scholar] [CrossRef] [PubMed]
- Osco, L.P.; de Arruda, M.d.S.; Marcato Junior, J.; da Silva, N.B.; Ramos, A.P.M.; Moryia, É.A.S.; Imai, N.N.; Pereira, D.R.; Creste, J.E.; Matsubara, E.T.; et al. A Convolutional Neural Network Approach for Counting and Geolocating Citrus-Trees in UAV Multispectral Imagery. ISPRS J. Photogramm. Remote Sens. 2020, 160, 97–106. [Google Scholar] [CrossRef]
- Lee, H.; Wang, J.; Leblon, B. Using Linear Regression, Random Forests, and Support Vector Machine with Unmanned Aerial Vehicle Multispectral Images to Predict Canopy Nitrogen Weight in Corn. Remote Sens. 2020, 12, 2071. [Google Scholar] [CrossRef]
- Linker, R.; Cohen, O.; Naor, A. Determination of the Number of Green Apples in RGB Images Recorded in Orchards. Comput. Electron. Agric. 2012, 81, 45–57. [Google Scholar] [CrossRef]
- Ross, N.E.; Pritchard, C.J.; Rubin, D.M.; Dusé, A.G. Automated Image Processing Method for the Diagnosis and Classification of Malaria on Thin Blood Smears. Med. Biol. Eng. Comput. 2006, 44, 427–436. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of Plant Density of Wheat Crops at Emergence from Very Low Altitude UAV Imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Zheng, H.; Zhou, X.; He, J.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.; Tian, Y. Early Season Detection of Rice Plants Using RGB, NIR-G-B and Multispectral Images from Unmanned Aerial Vehicle (UAV). Comput. Electron. Agric. 2020, 169, 105223. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Liu, Y.; Xu, J.; Bian, J.-W.; Gu, Y.-C.; Cheng, M.-M. MobileSal: Extremely Efficient RGB-D Salient Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 10261–10269. [Google Scholar] [CrossRef] [PubMed]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep Learning in Agriculture: A Survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Fan, Z.; Lu, J.; Gong, M.; Xie, H.; Goodman, E.D. Automatic Tobacco Plant Detection in UAV Images via Deep Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 876–887. [Google Scholar] [CrossRef]
- Barreto, A.; Lottes, P.; Ispizua Yamati, F.R.; Baumgarten, S.; Wolf, N.A.; Stachniss, C.; Mahlein, A.-K.; Paulus, S. Automatic UAV-Based Counting of Seedlings in Sugar-Beet Field and Extension to Maize and Strawberry. Comput. Electron. Agric. 2021, 191, 106493. [Google Scholar] [CrossRef]
- Vong, C.N.; Conway, L.S.; Feng, A.; Zhou, J.; Kitchen, N.R.; Sudduth, K.A. Corn Emergence Uniformity Estimation and Mapping Using UAV Imagery and Deep Learning. Comput. Electron. Agric. 2022, 198, 107008. [Google Scholar] [CrossRef]
- Ahmad, I.; Yang, Y.; Yue, Y.; Ye, C.; Hassan, M.; Cheng, X.; Wu, Y.; Zhang, Y. Deep Learning Based Detector YOLOv5 for Identifying Insect Pests. Appl. Sci. 2022, 12, 10167. [Google Scholar] [CrossRef]
- Qi, J.; Liu, X.; Liu, K.; Xu, F.; Guo, H.; Tian, X.; Li, M.; Bao, Z.; Li, Y. An Improved YOLOv5 Model Based on Visual Attention Mechanism: Application to Recognition of Tomato Virus Disease. Comput. Electron. Agric. 2022, 194, 106780. [Google Scholar] [CrossRef]
- Yan, B.; Fan, P.; Lei, X.; Liu, Z.; Yang, F. A Real-Time Apple Targets Detection Method for Picking Robot Based on Improved YOLOv5. Remote Sens. 2021, 13, 1619. [Google Scholar] [CrossRef]
- Jiang, K.; Xie, T.; Yan, R.; Wen, X.; Li, D.; Jiang, H.; Jiang, N.; Feng, L.; Duan, X.; Wang, J. An Attention Mechanism-Improved YOLOv7 Object Detection Algorithm for Hemp Duck Count Estimation. Agriculture 2022, 12, 1659. [Google Scholar] [CrossRef]
- Xia, Y.; Nguyen, M.; Yan, W.Q. A Real-Time Kiwifruit Detection Based on Improved YOLOv7. In Revised Selected Papers, Proceedings of the Image and Vision Computing: 37th International Conference, IVCNZ 2022, Auckland, New Zealand, 24–25 November 2022; Springer Nature: Cham, Switzerland, 2022; pp. 48–61. [Google Scholar]
- Yang, Z.; Ni, C.; Li, L.; Luo, W.; Qin, Y. Three-Stage Pavement Crack Localization and Segmentation Algorithm Based on Digital Image Processing and Deep Learning Techniques. Sensors 2022, 22, 8459. [Google Scholar] [CrossRef]
- Mandal, V.; Adu-Gyamfi, Y. Object Detection and Tracking Algorithms for Vehicle Counting: A Comparative Analysis. J. Big Data Anal. Transp. 2020, 2, 251–261. [Google Scholar] [CrossRef]
- Liu, H.; Yuan, G.; Yang, L.; Liu, K.; Zhou, H. An Appearance Defect Detection Method for Cigarettes Based on C-CenterNet. Electronics 2022, 11, 2182. [Google Scholar] [CrossRef]
- Zhuang, J.; Li, X.; Bagavathiannan, M.; Jin, X.; Yang, J.; Meng, W.; Li, T.; Li, L.; Wang, Y.; Chen, Y.; et al. Evaluation of Different Deep Convolutional Neural Networks for Detection of Broadleaf Weed Seedlings in Wheat. Pest Manag. Sci. 2022, 78, 521–529. [Google Scholar] [CrossRef]
- Zhao, L.; Li, S. Object Detection Algorithm Based on Improved YOLOv3. Electronics 2020, 9, 537. [Google Scholar] [CrossRef]
- Zakria, Z.; Deng, J.; Kumar, R.; Khokhar, M.S.; Cai, J.; Kumar, J. Multiscale and Direction Target Detecting in Remote Sensing Images via Modified YOLO-V4. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1039–1048. [Google Scholar] [CrossRef]
- Wu, W.; Liu, H.; Li, L.; Long, Y.; Wang, X.; Wang, Z.; Li, J.; Chang, Y. Application of Local Fully Convolutional Neural Network Combined with YOLO v5 Algorithm in Small Target Detection of Remote Sensing Image. PLoS ONE 2021, 16, e0259283. [Google Scholar] [CrossRef]
- Gallo, I.; Rehman, A.U.; Dehkordi, R.H.; Landro, N.; La Grassa, R.; Boschetti, M. Deep Object Detection of Crop Weeds: Performance of YOLOv7 on a Real Case Dataset from UAV Images. Remote Sens. 2023, 15, 539. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, P.; Wang, H.; Jin, Y. Saliency-Based Centernet for Ship Detection in SAR Images. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 1552–1555. [Google Scholar]
- Khaki, S.; Pham, H.; Khalilzadeh, Z.; Masoud, A.; Safaei, N.; Han, Y.; Kent, W.; Wang, L. High-Throughput Image-Based Plant Stand Count Estimation Using Convolutional Neural Networks. PLoS ONE 2022, 17, e0268762. [Google Scholar] [CrossRef]
- Feng, A.; Zhou, J.; Vories, E.; Sudduth, K.A. Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms. Remote Sens. 2020, 12, 1764. [Google Scholar] [CrossRef]
- He, J.; Zhang, N.; Su, X.; Lu, J.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.; Tian, Y. Estimating Leaf Area Index with a New Vegetation Index Considering the Influence of Rice Panicles. Remote Sens. 2019, 11, 1809. [Google Scholar] [CrossRef]
- Suo, C.; McGovern, E.; Gilmer, A. Coastal Dune Vegetation Mapping Using a Multispectral Sensor Mounted on an UAS. Remote Sens. 2019, 11, 1814. [Google Scholar] [CrossRef]
- Xia, L.; Zhang, R.; Chen, L.; Huang, Y.; Xu, G.; Wen, Y.; Yi, T. Monitor Cotton Budding Using SVM and UAV Images. Appl. Sci. 2019, 9, 4312. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, Z.; Wu, J.; Tian, Y.; Tang, H.; Guo, X. Real-Time Vehicle Detection Based on Improved YOLO V5. Sustainability 2022, 14, 12274. [Google Scholar] [CrossRef]
- Zhou, Y.; Tang, Y.; Zou, X.; Wu, M.; Tang, W.; Meng, F.; Zhang, Y.; Kang, H. Adaptive Active Positioning of Camellia Oleifera Fruit Picking Points: Classical Image Processing and YOLOv7 Fusion Algorithm. Appl. Sci. 2022, 12, 12959. [Google Scholar] [CrossRef]
- An, K.; Chen, Y.; Wang, S.; Xiao, Z. RCBi-CenterNet: An Absolute Pose Policy for 3D Object Detection in Autonomous Driving. Appl. Sci. 2021, 11, 5621. [Google Scholar] [CrossRef]
- Krichen, M.; Mihoub, A.; Alzahrani, M.Y.; Adoni, W.Y.H.; Nahhal, T. Are Formal Methods Applicable To Machine Learning And Artificial Intelligence? In Proceedings of the 2022 2nd International Conference of Smart Systems and Emerging Technologies (SMARTTECH), Riyadh, Saudi Arabia, 9–11 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 48–53. [Google Scholar]
- Seshia, S.A.; Sadigh, D.; Sastry, S.S. Toward Verified Artificial Intelligence. Commun. ACM 2022, 65, 46–55. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| UAV weight | 1487 g |
| Max flight time | 27 min |
| Image max resolution | 1600 × 1300 (4:3.25) |
| Time | Train Set | Val (Test) Set | Total |
|---|---|---|---|
| T1 | 3234 | 1143 | 4377 |
| T2 | 3715 | 1235 | 4950 |
| T3 | 6284 | 2108 | 8392 |
| T4 | 4192 | 1305 | 5497 |
| T5 | 4160 | 1408 | 5568 |
| T6 | 6770 | 2286 | 9056 |
| Total | 28,355 | 9485 | 37,840 |
| Model | Time | Training Set | Validation Set | ||||
|---|---|---|---|---|---|---|---|
| Precision (%) | Recall (%) | F1-Score (%) | Precision (%) | Recall (%) | F1-Score (%) | ||
| YOLOv5 | T1 | 93.1 | 93.6 | 93.3 | 93.8 | 88.7 | 91.2 |
| T2 | 95.9 | 95.2 | 95.5 | 96.6 | 96.0 | 96.3 | |
| T3 | 97.4 | 96.4 | 96.9 | 98.4 | 98.0 | 98.2 | |
| T4 | 96.1 | 95.7 | 95.9 | 96.5 | 95.4 | 95.9 | |
| T5 | 96.1 | 96.1 | 96.1 | 96.1 | 94.5 | 95.3 | |
| T6 | 97.7 | 95.7 | 96.7 | 97.2 | 94.6 | 95.9 | |
| YOLOv7 | T1 | 92.3 | 94.4 | 93.3 | 94.3 | 92.0 | 93.2 |
| T2 | 96.0 | 96.5 | 96.2 | 95.9 | 96.6 | 96.2 | |
| T3 | 97.3 | 98.2 | 97.7 | 98.1 | 98.6 | 98.3 | |
| T4 | 96.8 | 96.2 | 96.5 | 96.9 | 96.6 | 96.7 | |
| T5 | 95.8 | 96.4 | 96.1 | 97.3 | 96.5 | 96.9 | |
| T6 | 98.5 | 97.9 | 98.2 | 97.3 | 96.0 | 96.7 | |
| CenterNet | T1 | 89.2 | 79.3 | 83.9 | 85.7 | 79.5 | 82.5 |
| T2 | 93.3 | 82.8 | 87.7 | 92.9 | 82.6 | 87.4 | |
| T3 | 96.4 | 87.6 | 91.8 | 96.8 | 88.2 | 92.3 | |
| T4 | 95.1 | 83.1 | 88.7 | 94.8 | 83.8 | 89.0 | |
| T5 | 95.1 | 84.3 | 89.4 | 96.6 | 85.5 | 90.7 | |
| T6 | 98.2 | 93.2 | 95.6 | 97.9 | 93.4 | 95.6 | |
| Model | Time | Training Set | Validation Set | ||||
|---|---|---|---|---|---|---|---|
| R² | RMSE | RRMSE (%) | R² | RMSE | RRMSE (%) | ||
| YOLOv5 | T1 | 0.85 | 9.36 | 8.40 | 0.64 | 12.48 | 11.46 |
| T2 | 0.97 | 5.97 | 4.82 | 0.90 | 6.50 | 5.27 | |
| T3 | 0.91 | 9.53 | 4.55 | 0.93 | 9.97 | 4.73 | |
| T4 | 0.94 | 5.79 | 4.14 | 0.90 | 4.63 | 3.54 | |
| T5 | 0.94 | 7.89 | 5.69 | 0.87 | 5.41 | 3.84 | |
| T6 | 0.74 | 17.24 | 7.64 | 0.29 | 22.98 | 10.05 | |
| YOLOv7 | T1 | 0.88 | 7.25 | 6.50 | 0.65 | 11.10 | 10.20 |
| T2 | 0.97 | 11.48 | 9.27 | 0.91 | 5.21 | 4.22 | |
| T3 | 0.92 | 8.32 | 3.97 | 0.94 | 8.03 | 3.81 | |
| T4 | 0.92 | 5.82 | 4.16 | 0.90 | 4.32 | 3.31 | |
| T5 | 0.92 | 8.36 | 6.03 | 0.92 | 5.39 | 3.83 | |
| T6 | 0.78 | 9.17 | 4.06 | 0.57 | 11.61 | 5.08 | |
| CenterNet | T1 | 0.88 | 10.55 | 9.46 | 0.68 | 12.75 | 11.71 |
| T2 | 0.97 | 6.80 | 5.49 | 0.93 | 5.77 | 4.67 | |
| T3 | 0.95 | 6.66 | 3.18 | 0.94 | 8.55 | 4.06 | |
| T4 | 0.94 | 5.47 | 3.92 | 0.91 | 3.95 | 3.03 | |
| T5 | 0.92 | 6.87 | 4.96 | 0.97 | 3.36 | 2.39 | |
| T6 | 0.95 | 3.95 | 1.75 | 0.69 | 6.55 | 2.87 | |
| Model | Training Set | Validation Set | ||||||
|---|---|---|---|---|---|---|---|---|
| True Value | Predicted Value | False Positive | False Negative | True Value | Predicted Value | False Positive | False Negative | |
| YOLOv5 | 4192 | 4334 | 150 | 8 | 1305 | 1339 | 37 | 3 |
| YOLOv7 | 4192 | 4324 | 135 | 3 | 1305 | 1334 | 31 | 2 |
| CenterNet | 4192 | 4326 | 140 | 6 | 1305 | 1333 | 31 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Y.; Chen, W.; Ma, Y.; Zhang, Z.; Gao, P.; Lv, X. Cotton Seedling Detection and Counting Based on UAV Multispectral Images and Deep Learning Methods. Remote Sens. 2023, 15, 2680. https://doi.org/10.3390/rs15102680
Feng Y, Chen W, Ma Y, Zhang Z, Gao P, Lv X. Cotton Seedling Detection and Counting Based on UAV Multispectral Images and Deep Learning Methods. Remote Sensing. 2023; 15(10):2680. https://doi.org/10.3390/rs15102680
Chicago/Turabian StyleFeng, Yingxiang, Wei Chen, Yiru Ma, Ze Zhang, Pan Gao, and Xin Lv. 2023. "Cotton Seedling Detection and Counting Based on UAV Multispectral Images and Deep Learning Methods" Remote Sensing 15, no. 10: 2680. https://doi.org/10.3390/rs15102680