
Improvement and Assessment of Gaofen-3 Spotlight Mode 3-D Localization Accuracy
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.1.1. GCPs
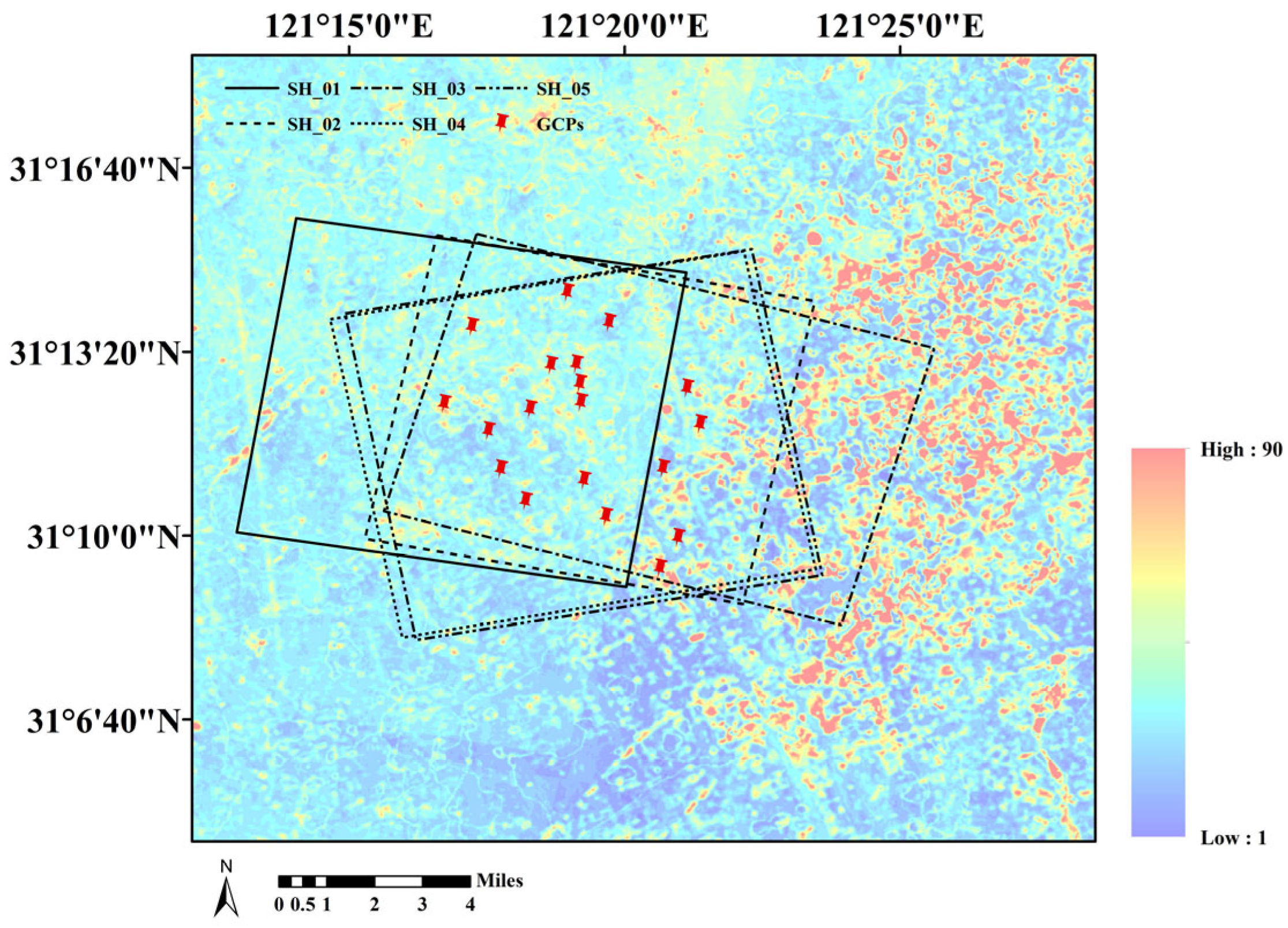
2.1.2. Study Area and Gaofen-3 Image Data
2.2. Methods
2.2.1. Stereo-Image Pair Acquisition Method
2.2.2. 3-D Localization Method for Spaceborne SAR Imagery
- The initial iteration value of the unknown ground point was set. In general, the average elevation of the corresponding region of the stereo-image pair can be used as the initial value.
- Using the initial ground coordinates and observed values of the image point coordinates of the same name, the coefficients in the error equation were solved according to Equation (3).
- The least-squares method was used to obtain the correction value of the ground unknown point coordinates.
- When the correction values exceed the allowable limit value, the correction value calculated in the third step was superimposed on . In this way, we can get the new initial coordinates of the unknown points on the ground, and then start the calculation from the second step down.
- When the correction value is within the limit value, the loop breaks, representing the end of the calculation. In this case, is the true value of an unknown point on the ground.
2.2.3. Optimizing the RPC Model
2.2.4. Evaluation of 3-D Stereo Accuracy
- Pick the SAR spotlight image; the coordinates and of the GCP in the stereo-image pair were obtained.
- The 3-D coordinates of the point with the same name were obtained using the RPC model, and the coordinates were compared with the coordinates of the target point. The field measurement coordinates were transformed into plane coordinates and the elevation in the UTM coordinate system.
- In the UTM coordinate system, the RMSE of the north direction, east direction, plane, and elevation height of all checkpoints of the stereo-image pair was calculated.
3. Results and Discussion
- Overall, the elevation accuracy was poor, at ±33.546 m (the median elevation accuracy of all stereo-image pairs), which is worse than 37 m in most cases. The plane accuracy was better at ±5.307 m (the median plane accuracy of all stereo-image pairs), which is better than 10 m in general.
- The plane accuracy of the 3-D localization of the ipsilateral stereo-image pair was lower than that of the heterolateral stereo-image pair, and the planar accuracy of the ipsilateral stereo-image pair HN_V was the worst at 27.448 m. The plane accuracy of the heterolateral stereo-image for SX_B was the worst at 21.443 m.
- As shown in Figure 6, the 3-D localization accuracy of all the stereo-image pairs fluctuated significantly. In general, the larger the stereo intersection angle, the worse the elevation accuracy. The plane accuracy was less affected by the stereo intersection angle.
- After geometric calibration, the accuracy of 3-D localization was greatly improved. The elevation accuracy was ±1.512 m (the median elevation accuracy of all optimized stereo-image pairs), which was mostly better than 5 m. The plane accuracy was ±4.783 m (the median plan accuracy of all optimized stereo-image pairs), which is better than 6 m in general. The elevation accuracy was improved by approximately 30 m, and the improvement effect was good for the stereo image, with a plane accuracy better than 5 m, and the improvement effect was approximately 10 m. For stereo images whose plane accuracy is worse than 5 m before optimization, the plane accuracy is generally improved.
- The observed ipsilateral stereo-image pair HN_V was significantly better than the other stereo-image pairs in the improvement of plane accuracy, and the difference in plane accuracy before and after optimization was 19.186 m. The improvement in elevation accuracy was the worst, and the elevation difference before and after optimization was 6.151 m.
- As shown in Figure 6, the fluctuation range of the 3-D localization accuracy became smaller and more stable within a certain range. The stereo accuracy after geometric calibration was less affected by the intersection angle.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Q.; Yan, S.; Lü, M.; Zhang, L.; Liu, G. Accurate extraction and analysis of mountain glacier surface motion with GF-3 imagery. J. Glaciol. Geocryol. 2021, 43, 1594–1605. [Google Scholar]
- Zhang, L.; Wang, Z.; Ye, K.; Chang, D. Coastline Extraction Method Based on Multi Feature Classification of Full Polarization SAR Image. Remote Sens. Inf. 2022, 37, 58–65. [Google Scholar]
- Lin, X.; Luo, D.; Lian, R.; Wei, W. Application of GF-3 Spotlight Mode Data in Urban Flood Disaster Emergency Response. Geospat. Inf. 2021, 20, 1–4. [Google Scholar]
- Zhang, Q. System Design and Key Technologies of the GAOFEN-3 Satellite. Acta Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Gao, L. Basic Method and Practice of SAR Photogrammetric Processing; PLA Information Engineering University: Zhengzhou, China, 2004. [Google Scholar]
- Toutin, T.; Chenier, R. 3-D Radargrammetric Modeling of RADARSAT-2 Ultrafine Mode: Preliminary Results of the Geometric Calibration. IEEE Geosci. Remote Sens. Lett. 2009, 6, 282–286. [Google Scholar] [CrossRef]
- Toutin, T.; Blondel, E.; Clavet, D.; Schmitt, C. Stereo radargrammetry with Radarsat-2 in the Canadian Arctic. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2601–2609. [Google Scholar] [CrossRef]
- Toutin, T. Impact of Radarsat-2 SAR Ultrafine-Mode Parameters on Stereo-Radargrammetric DEMs. IEEE Trans. Geosci. Rem. Sens. 2010, 48, 3816–3823. [Google Scholar] [CrossRef]
- Papasodoro, C.; Royer, A.; Langlois, A.; Berthier, E. Potential of RADARSAT-2 stereo radargrammetry for the generation of glacier DEMs. J. Glaciol. 2016, 62, 486–496. [Google Scholar] [CrossRef]
- Capaldo, P.; Crespi, M.; Fratarcangeli, F.; Nascetti, A.; Pieralice, F. High-Resolution SAR Radargrammetry: A First Application With COSMO-SkyMed SpotLight Imagery. IEEE Trans. Geosci. Rem Sens. 2011, 8, 1100–1104. [Google Scholar] [CrossRef]
- Agrawal, R.; Das, A.; Rajawat, A. Accuracy Assessment of Digital Elevation Model Generated by SAR Stereoscopic Technique Using COSMO-Skymed Data. J. Indian Soc. Remote Sens. 2018, 46, 1739–1747. [Google Scholar] [CrossRef]
- Eldhuset, K.; Weydahl, D.J. Geolocation and stereo height estimation using TerraSAR-X spotlight image data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3574–3581. [Google Scholar] [CrossRef]
- Zhang, G.; Li, Z.; Pan, H.; Qiang, Q.; Zhai, L. Orientation of Spaceborne SAR Stereo Pairs Employing the RPC Adjustment Model. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2782–2792. [Google Scholar] [CrossRef]
- Zhang, G.; Li, Z. RPC-based adjustment model for TerraSAR-X stereo orientation. Sci. Surv. Mapp. 2011, 36, 146–148. [Google Scholar]
- Balss, U.; Eineder, M.; Fritz, T.; Breit, H.; Minet, C. Techniques for High Accuracy Relative and Absolute Localization of TerraSAR-X/TanDEM-X Data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011. [Google Scholar]
- Balss, U.; Gisinger, C.; Cong, X.; Brcic, R.; Hackel, S.; Eineder, M. Precise Measurements on the Absolute Localization Accuracy of TerraSAR-X on the Base of Far-Distributed Test Sites. In Proceedings of the 10th European Conference on Synthetic Aperture Radar (EUSAR), Berlin, Germany, 5 June 2014. [Google Scholar]
- Balss, U.; Gisinger, C.; Eineder, M. Measurements on the Absolute 2-D and 3-D Localization Accuracy of TerraSAR-X. Remote Sens. 2018, 10, 656. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Boston, MA, USA, 2005. [Google Scholar]
- Liu, Y.; Xing, M.; Sun, G.; Lv, X.; Bao, Z.; Hong, W.; Wu, Y. Echo model analyses and imaging algorithm for high-resolution SAR on high-speed platform. IEEE Trans. Geosci. Remote Sens. 2012, 50, 933–950. [Google Scholar] [CrossRef]
- Li, D.; Liu, J.Y. A stereo positioning method of GaoFen-3 SAR images under different time and space conditions. J. Univ. Chin. Acad. Sci. 2021, 38, 519–523. [Google Scholar]
- Benyi, C.; Yong, F. The principles of positioning with space-borne SAR images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 4, pp. 1950–1952. [Google Scholar] [CrossRef]
- Chen, P.H.; Dowman, I.J. Space intersection from ERS-1 synthetic aperture radar images. Photogramm. Rec. 1996, 15, 561–573. [Google Scholar] [CrossRef]
- Sansosti, E.; Berardino, P.; Manunta, M.; Serafino, F.; Fornaro, G. Geometrical SAR image registration. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2861–2870. [Google Scholar] [CrossRef]
- Zhang, G.; Fei, W.; Li, Z.; Zhu, X.; Tang, X. Analysis and Test of the Substitutability of the RPC Model for the Rigorous Sensor Model of Spaceborne SAR Imagery. Acta Geod. Cartogr. Sin. 2010, 39, 264. [Google Scholar]
- Wu, Y. Accurate Geometric Positioning of Spaceborne SAR Remote Sensing Imagery; Wuhan University: Wuhan, China, 2010. [Google Scholar]
- Deng, M.; Zhang, G.; Cai, C.; Xu, K.; Zhao, R.; Guo, F.; Suo, J. Improvement and Assessment of the Absolute Positioning Accuracy of Chinese High-Resolution SAR Satellites. Remote Sens. 2019, 11, 1465. [Google Scholar] [CrossRef]
- Raggam, H.; Gutjahr, K.; Perko, R.; Schardt, M. Assessment of the Stereo-Radargrammetric Mapping Potential of TerraSAR-X Multibeam Spotlight Data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 971–977. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Area | Henan | |||||||||
| Image ID | HN_01 | HN_02 | HN_03 | HN_04 | HN_05 | HN_06 | HN_07 | HN_08 | HN_09 | HN_10 |
| Number of GCPs | 8 | 6 | 9 | 9 | 8 | 9 | 7 | 5 | 6 | 8 |
| Test Area | Shaanxi | Shanghai | ||||||||
| Image ID | SX_01 | SX_02 | SX_03 | SX_04 | SX_05 | SH_01 | SH_02 | SH_03 | SH_04 | SH_05 |
| Number of GCPs | 11 | 12 | 7 | 10 | 5 | 10 | 8 | 14 | 17 | 16 |
| Image ID | Orbit | Look Direction | Incidence Angle (°) | Acquisition Time |
|---|---|---|---|---|
| HN_01 | Descending | Right | 33.8 | 14 October 2016 |
| HN_02 | Descending | Right | 25.7 | 7 August 2018 |
| HN_03 | Descending | Right | 40.4 | 29 August 2019 |
| HN_04 | Descending | Right | 37.4 | 6 December 2019 |
| HN_05 | Descending | Right | 43.2 | 11 December 2019 |
| HN_06 | Descending | Right | 37.4 | 7 November 2019 |
| HN_07 | Ascending | Right | 37.6 | 9 November 2019 |
| HN_08 | Ascending | Right | 30.2 | 14 November 2019 |
| HN_09 | Ascending | Right | 21.1 | 19 November 2019 |
| HN_10 | Descending | Right | 40.6 | 24 November 2019 |
| Image ID | Orbit | Look Direction | Incidence Angle (°) | Acquisition Time |
|---|---|---|---|---|
| SX_01 | Descending | Right | 32.0 | 14 August 2018 |
| SX_02 | Descending | Right | 32.0 | 11 December 2018 |
| SX_03 | Ascending | Right | 28.3 | 28 July 2018 |
| SX_04 | Ascending | Right | 39.5 | 4 August 2018 |
| SX_05 | Ascending | Right | 19.1 | 29 September 2018 |
| Image ID | Orbit | Look Direction | Incidence Angle (°) | Acquisition Time |
|---|---|---|---|---|
| SH_01 | Descending | Right | 42.7 | 9 March 2018 |
| SH_02 | Descending | Right | 23.6 | 9 April 2018 |
| SH_03 | Descending | Left | 35.0 | 27 March 2018 |
| SH_04 | Ascending | Right | 28.9 | 23 March 2018 |
| SH_05 | Ascending | Right | 33.0 | 4 April 2018 |
| Stereopairs Acquisition Method | Stereopair ID | Image ID | Time Width & Bandwidth (μs & MHz) | GCPs | Intersection Angle (°) | Before/After Model Optimization | RMSE (m) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| East | North | Plane | Height | |||||||
| Heterolateral | HN_A | HN_01 | 240 & 45.000 | 6 | 83.7 | Before | 7.022 | 1.978 | 7.295 | 37.026 |
| HN_07 | 240 & 54.990 | After | 5.208 | 1.440 | 5.403 | 0.580 | ||||
| HN_B | HN_01 | 240 & 45.000 | 5 | 75.4 | Before | 3.887 | 1.396 | 4.130 | 33.374 | |
| HN_08 | 240 & 45.000 | After | 4.383 | 1.075 | 4.513 | 0.803 | ||||
| HN_C | HN_01 | 240 & 45.000 | 6 | 65.7 | Before | 2.338 | 1.215 | 2.635 | 30.538 | |
| HN_09 | 240 & 45.000 | After | 4.945 | 0.820 | 5.012 | 1.288 | ||||
| HN_D | HN_02 | 240 & 45.000 | 5 | 74.5 | Before | 9.168 | 0.812 | 9.203 | 33.546 | |
| HN_07 | 240 & 54.990 | After | 5.221 | 0.826 | 5.286 | 0.115 | ||||
| HN_E | HN_02 | 240 & 45.000 | 4 | 66.5 | Before | 5.983 | 0.529 | 6.007 | 30.792 | |
| HN_08 | 240 & 45.000 | After | 4.409 | 0.512 | 4.439 | 1.234 | ||||
| HN_F | HN_02 | 240 & 45.000 | 5 | 57.1 | Before | 4.569 | 0.136 | 4.571 | 28.604 | |
| HN_09 | 240 & 45.000 | After | 4.985 | 0.220 | 4.990 | 1.682 | ||||
| HN_G | HN_03 | 240 & 54.990 | 6 | 88.7 | Before | 1.482 | 1.800 | 2.332 | 42.635 | |
| HN_07 | 240 & 54.990 | After | 2.047 | 1.306 | 2.428 | 3.575 | ||||
| HN_H | HN_03 | 240 & 54.990 | 5 | 82.9 | Before | 1.933 | 1.337 | 2.351 | 37.687 | |
| HN_08 | 240 & 45.000 | After | 0.907 | 1.133 | 1.452 | 1.634 | ||||
| HN_I | HN_03 | 240 & 54.990 | 6 | 73.7 | Before | 3.973 | 0.953 | 4.086 | 33.516 | |
| HN_09 | 240 & 45.000 | After | 0.930 | 0.680 | 1.152 | 0.545 | ||||
| HN_J | HN_04 | 240 & 45.000 | 7 | 87.7 | Before | 4.824 | 1.039 | 4.935 | 38.371 | |
| HN_07 | 240 & 54.990 | After | 4.686 | 1.036 | 4.799 | 0.558 | ||||
| HN_K | HN_04 | 240 & 45.000 | 4 | 79.4 | Before | 1.561 | 0.539 | 1.652 | 34.352 | |
| HN_08 | 240 & 45.000 | After | 3.816 | 0.745 | 3.888 | 0.868 | ||||
| HN_L | HN_04 | 240 & 45.000 | 6 | 69.5 | Before | 0.448 | 0.154 | 0.474 | 30.911 | |
| HN_09 | 240 & 45.000 | After | 4.140 | 0.338 | 4.154 | 1.512 | ||||
| HN_M | HN_05 | 240 & 54.990 | 5 | 85.3 | Before | 0.222 | 0.757 | 0.789 | 43.717 | |
| HN_07 | 240 & 54.990 | After | 2.131 | 0.863 | 2.300 | 3.253 | ||||
| HN_N | HN_05 | 240 & 54.990 | 3 | 86.2 | Before | 3.592 | 0.300 | 3.605 | 38.178 | |
| HN_08 | 240 & 45.000 | After | 1.083 | 0.294 | 1.123 | 1.074 | ||||
| HN_O | HN_05 | 240 & 54.990 | 5 | 76.2 | Before | 5.927 | 0.613 | 5.958 | 33.604 | |
| HN_09 | 240 & 45.000 | After | 1.037 | 0.490 | 1.147 | 0.204 | ||||
| HN_P | HN_06 | 240 & 45.000 | 6 | 87.7 | Before | 5.907 | 1.954 | 6.222 | 37.892 | |
| HN_07 | 240 & 54.990 | After | 5.376 | 1.712 | 5.642 | 0.343 | ||||
| HN_Q | HN_06 | 240 & 45.000 | 4 | 79.4 | Before | 2.980 | 1.672 | 3.417 | 33.961 | |
| HN_08 | 240 & 45.000 | After | 4.745 | 1.628 | 5.016 | 1.111 | ||||
| HN_R | HN_06 | 240 & 45.000 | 5 | 69.5 | Before | 1.308 | 1.221 | 1.789 | 30.773 | |
| HN_09 | 240 & 45.000 | After | 5.174 | 1.088 | 5.288 | 1.575 | ||||
| HN_S | HN_07 | 240 & 54.990 | 6 | 88.6 | Before | 0.444 | 0.422 | 0.612 | 43.642 | |
| HN_10 | 240 & 54.990 | After | 0.488 | 0.479 | 0.684 | 4.540 | ||||
| HN_T | HN_08 | 240 & 45.000 | 5 | 82.4 | Before | 4.165 | 0.339 | 4.179 | 38.494 | |
| HN_10 | 240 & 54.990 | After | 0.878 | 0.569 | 1.046 | 2.395 | ||||
| HN_U | HN_09 | 240 & 45.000 | 5 | 73.6 | Before | 6.649 | 0.631 | 6.679 | 34.067 | |
| HN_10 | 240 & 54.990 | After | 1.232 | 0.555 | 1.351 | 1.048 | ||||
| Ipsilateral | HN_V | HN_02 | 240 & 45.000 | 5 | 21.2 | Before | 26.648 | 6.579 | 27.448 | 13.320 |
| HN_05 | 240 & 54.990 | After | 7.562 | 3.329 | 8.262 | 7.169 | ||||
| Stereopairs Acquisition Method | Stereopair ID | Image ID | Time Width & Bandwidth (μs & MHz) | GCPs | Intersection Angle (°) | Before/After Model Optimization | RMSE (m) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| East | North | Plane | Height | |||||||
| Heterolateral | SX_A | SX_01 | 240 & 45.000 | 6 | 71.4 | Before | 17.342 | 12.085 | 21.137 | 33.004 |
| SX_03 | 240 & 35.009 | After | 4.560 | 1.691 | 4.863 | 0.384 | ||||
| SX_B | SX_01 | 240 & 45.000 | 5 | 83.7 | Before | 18.292 | 11.190 | 21.443 | 36.506 | |
| SX_04 | 240 & 45.000 | After | 6.239 | 1.677 | 6.460 | 1.562 | ||||
| SX_C | SX_01 | 240 & 45.000 | 6 | 61.6 | Before | 12.221 | 13.629 | 18.305 | 26.083 | |
| SX_05 | 240 & 35.009 | After | 2.130 | 2.647 | 3.397 | 5.923 | ||||
| SX_D | SX_02 | 240 & 45.000 | 5 | 71.4 | Before | 5.302 | 2.493 | 5.859 | 33.457 | |
| SX_03 | 240 & 35.009 | After | 5.838 | 2.715 | 6.439 | 0.567 | ||||
| SX_E | SX_02 | 240 & 45.000 | 4 | 83.6 | Before | 9.794 | 1.827 | 9.963 | 37.870 | |
| SX_04 | 240 & 45.000 | After | 6.975 | 1.925 | 7.236 | 1.600 | ||||
| SX_F | SX_02 | 240 & 45.000 | 5 | 61.6 | Before | 3.367 | 4.102 | 5.307 | 25.322 | |
| SX_05 | 240 & 35.009 | After | 0.652 | 3.880 | 3.934 | 5.540 | ||||
| Stereopairs Acquisition Method | Stereopair ID | Image ID | Time Width & Bandwidth (μs & MHz) | GCPs | Intersection Angle (°) | Before/After Model Optimization | RMSE (m) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| East | North | Plane | Height | |||||||
| Heterolateral | SH_A | SH_02 | 240 & 35.009 | 6 | 66.6 | Before | 7.808 | 2.138 | 8.096 | 31.309 |
| SH_03 | 240 & 45.000 | After | 4.130 | 2.414 | 4.783 | 1.656 | ||||
| SH_B | SH_02 | 240 & 35.009 | 8 | 63.0 | Before | 11.178 | 1.118 | 11.234 | 29.434 | |
| SH_04 | 240 & 35.009 | After | 9.511 | 1.213 | 9.588 | 2.242 | ||||
| SH_C | SH_02 | 240 & 35.009 | 8 | 67.4 | Before | 11.295 | 1.209 | 11.359 | 27.889 | |
| SH_05 | 240 & 45.000 | After | 8.057 | 1.461 | 8.188 | 4.893 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, N.; Deng, M.; Wang, D.; Zhang, Z.; Yang, Y. Improvement and Assessment of Gaofen-3 Spotlight Mode 3-D Localization Accuracy. Remote Sens. 2023, 15, 2512. https://doi.org/10.3390/rs15102512
Chen N, Deng M, Wang D, Zhang Z, Yang Y. Improvement and Assessment of Gaofen-3 Spotlight Mode 3-D Localization Accuracy. Remote Sensing. 2023; 15(10):2512. https://doi.org/10.3390/rs15102512
Chicago/Turabian StyleChen, Nuo, Mingjun Deng, Di Wang, Zhengpeng Zhang, and Yin Yang. 2023. "Improvement and Assessment of Gaofen-3 Spotlight Mode 3-D Localization Accuracy" Remote Sensing 15, no. 10: 2512. https://doi.org/10.3390/rs15102512