
Evaluation of Sentinel-6 Altimetry Data over Ocean

Abstract
:1. Introduction
2. Materials and Methods
2.1. NDBC SWH and Wind Speed Data
2.2. ERA5 Re-analysis Data
2.3. Satellite Altimetry Data
2.3.1. Sentinel-6 Altimetry Data
2.3.2. Sentinel-3A/B Altimetry Data
2.3.3. Jason-3 Altimetry Data
2.4. Data Analysis Methods
3. Results
3.1. Assessment of Sea Surface Height
3.1.1. Range Noise Analysis
3.1.2. Sea Level Anomaly (SLA) Spectral Analysis
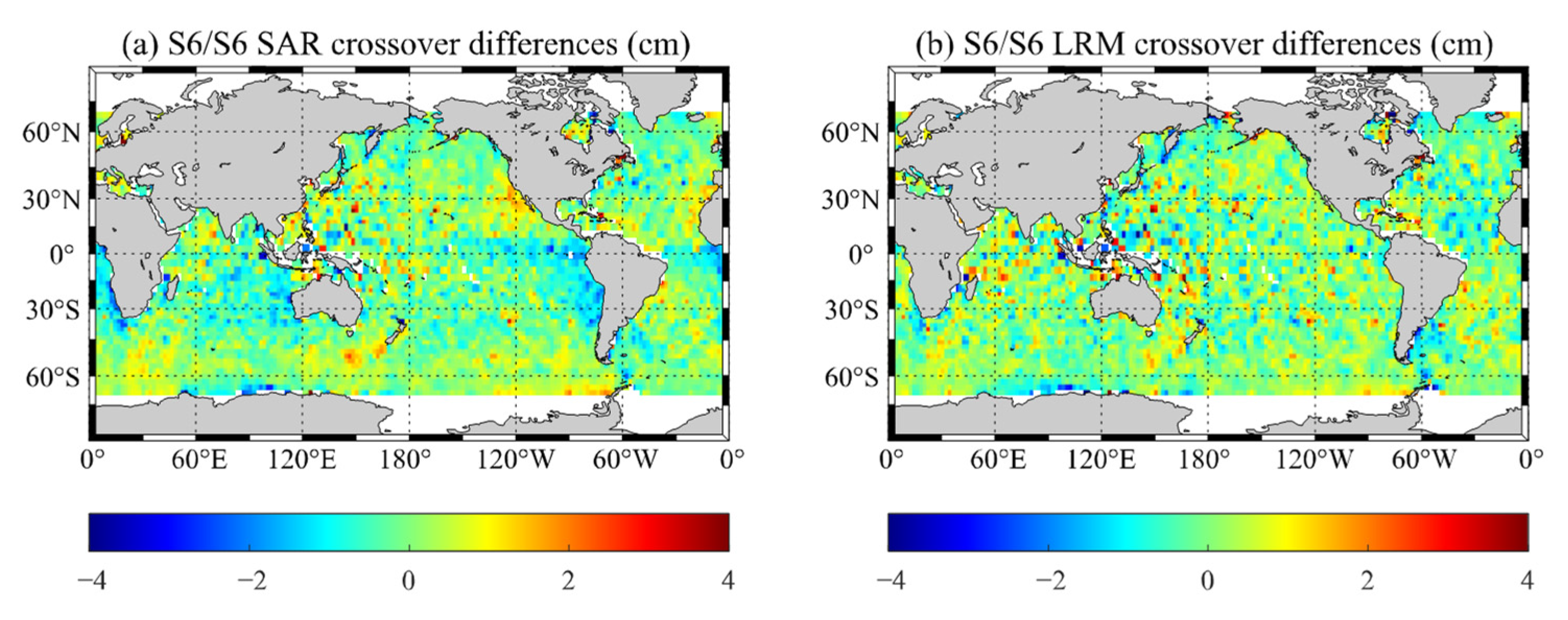
3.1.3. SSH Crossover Analysis
3.2. Assessment of SWH and Wind Speed
3.2.1. SWH and Sigma0 Noise Analysis
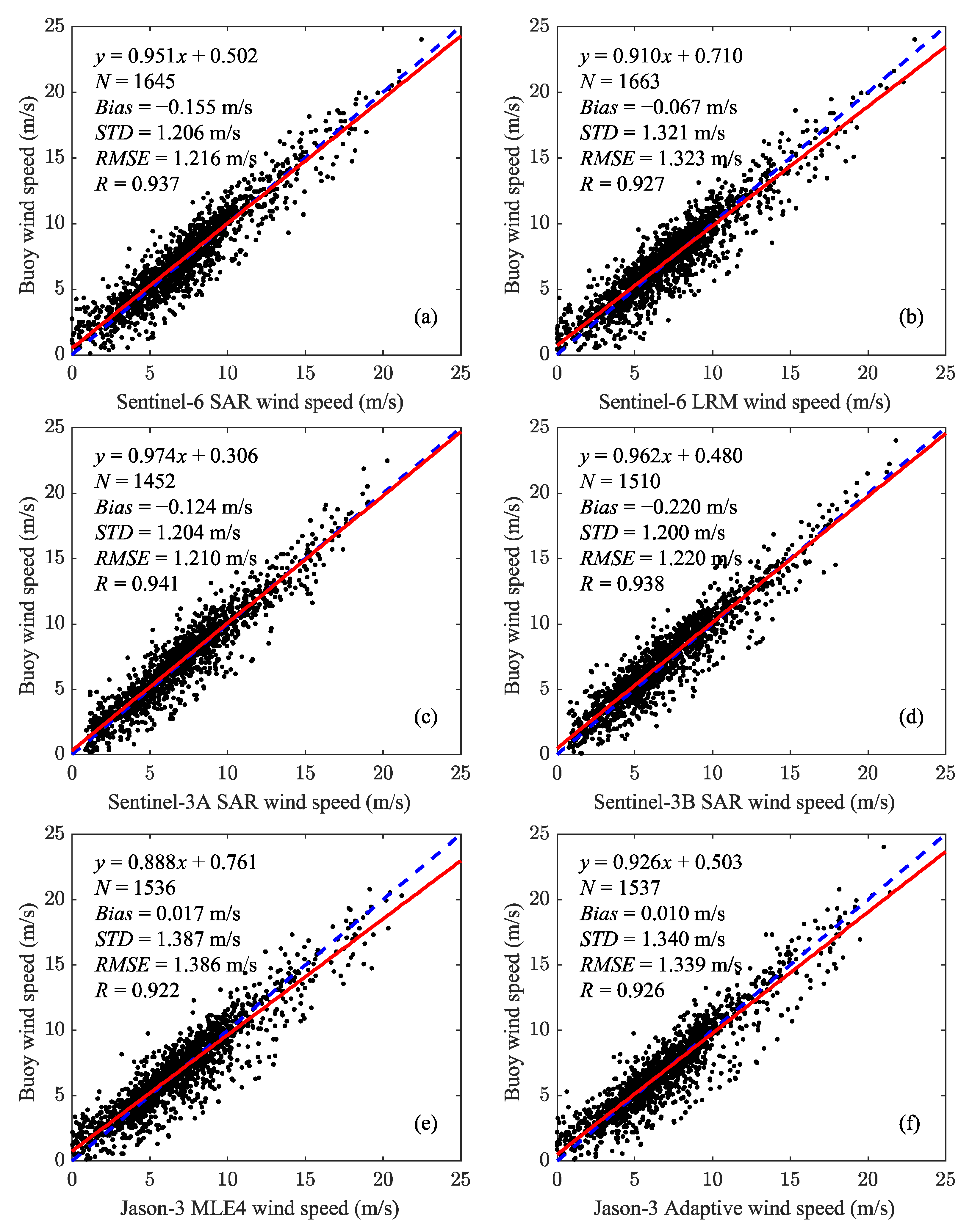
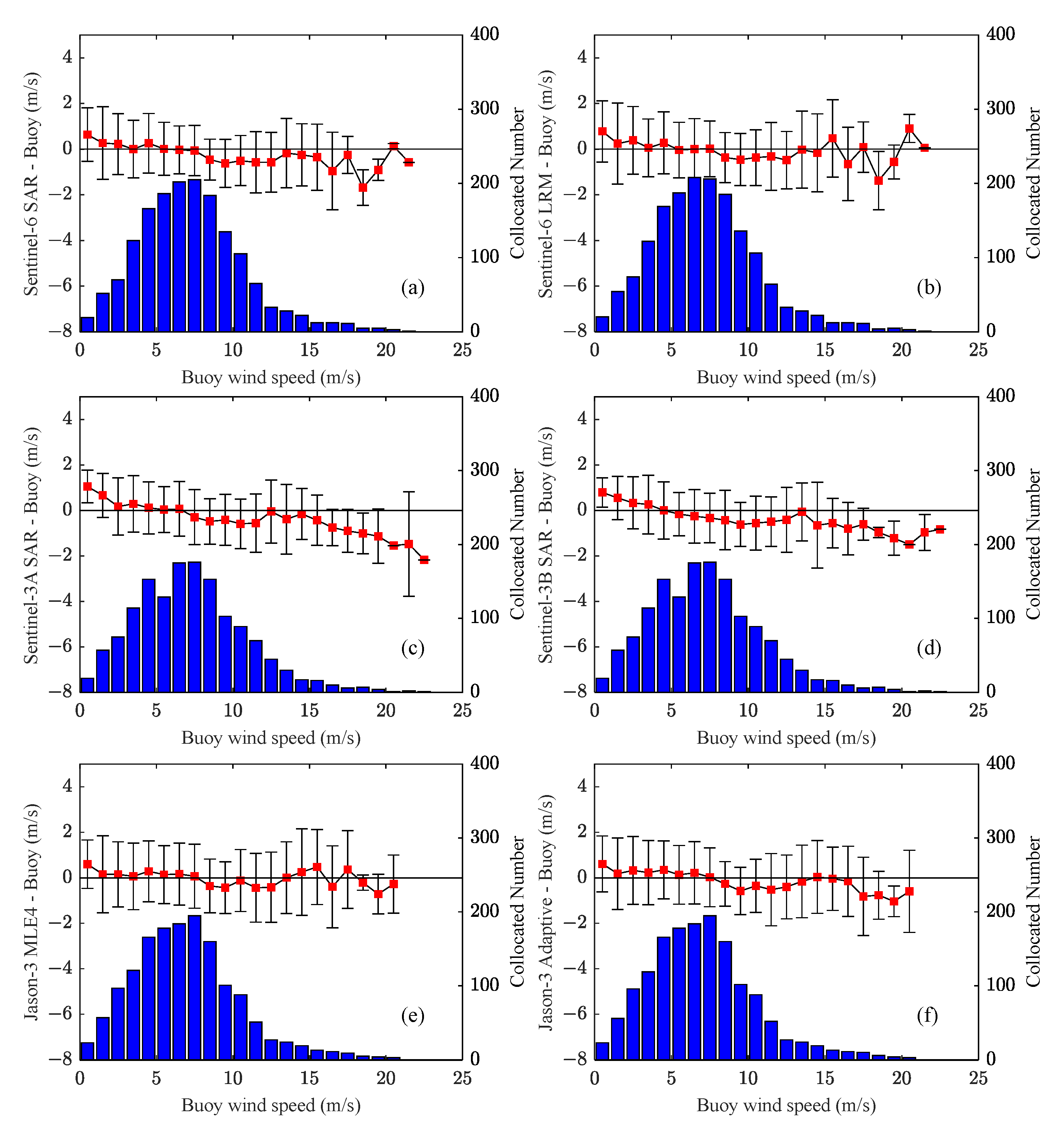
3.2.2. Comparison against NDBC Data
3.2.3. Comparison against Other Satellites
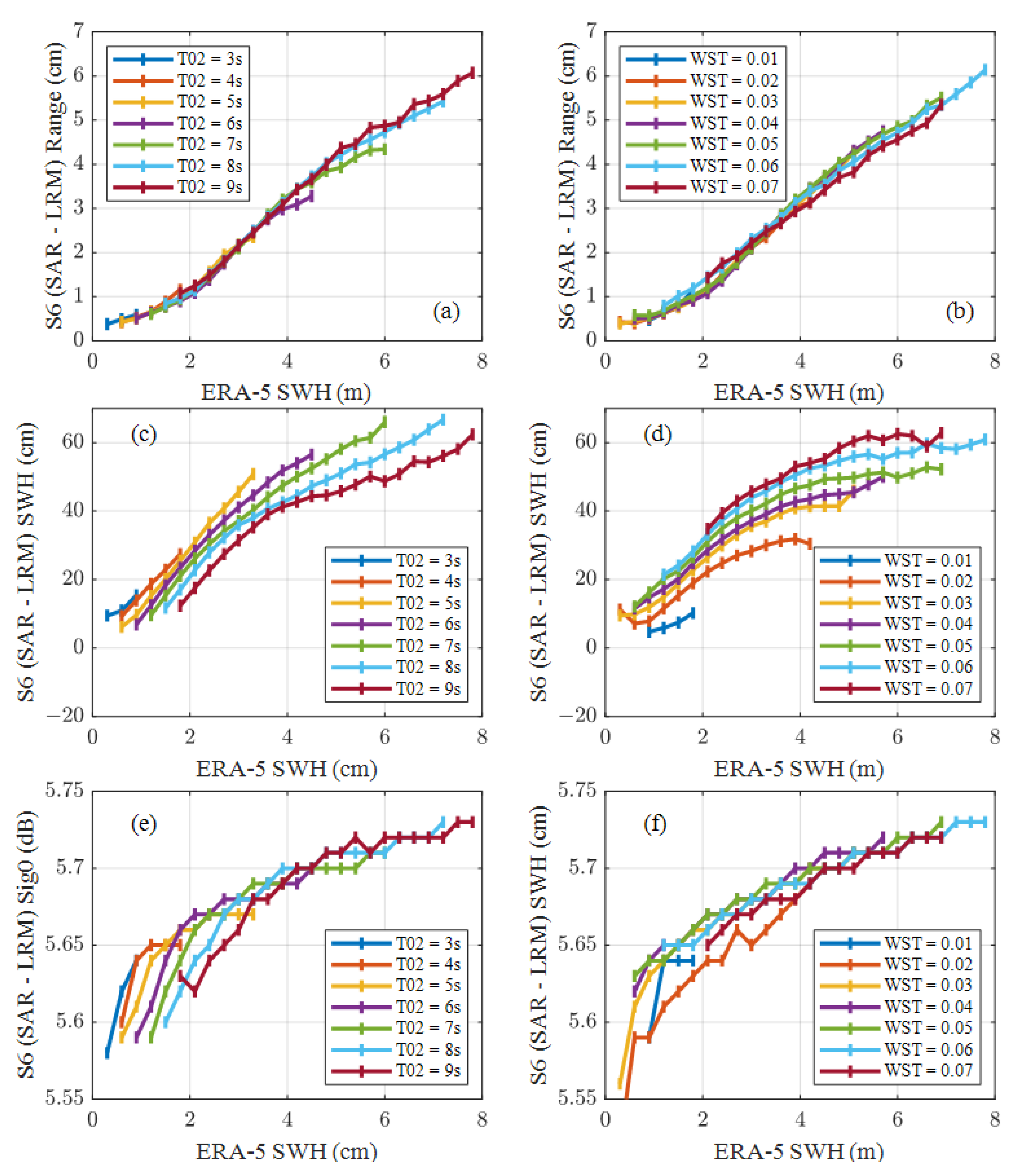
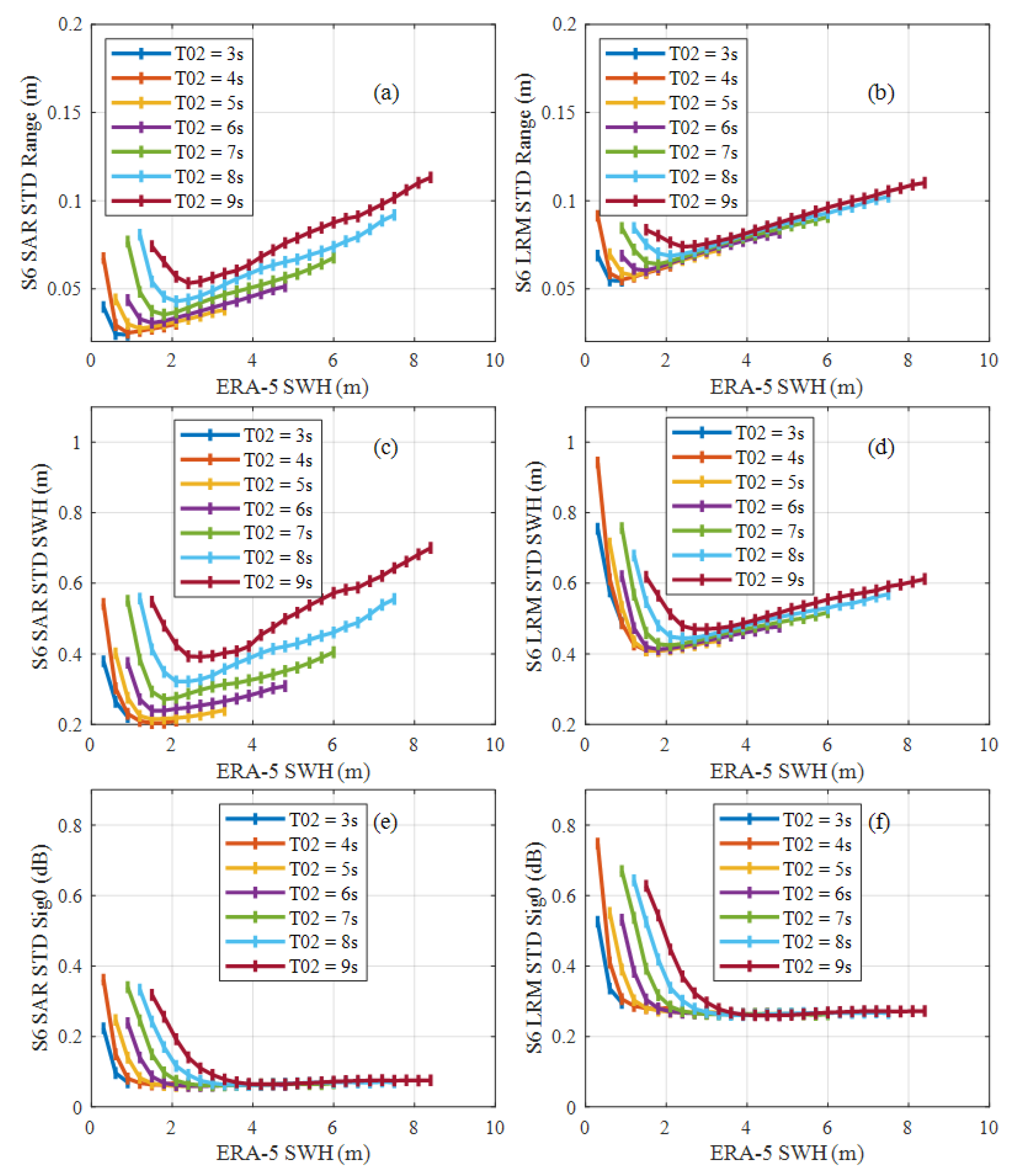
3.3. Impact of Ocean Waves on Parameter Retrievals from Sentinel-6 SARM Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Legeais, J.; Ablain, M.; Zawadzki, L.; Zuo, H.; Johannessen, J.A.; Scharffenberg, M.G.; Fenoglio-Marc, L.; Fernandes, M.J.; Andersen, O.B.; Rudenko, S.; et al. An improved and homogeneous altimeter sea level record from the ESA Climate Change Initiative. Earth Syst. Sci. Data 2018, 10, 281–301. [Google Scholar] [CrossRef] [Green Version]
- Karimi, A.A.; Ghobadi-Far, K.; Passaro, M. Barystatic and steric sea level variations in the Baltic Sea and implications of water exchange with the North Sea in the satellite era. Front. Mar. Sci. 2022, 9, 963564. [Google Scholar] [CrossRef]
- Li, Z.; Guo, J.; Ji, B.; Wan, X.; Zhang, S. A Review of Marine Gravity Field Recovery from Satellite Altimetry. Remote Sens. 2022, 14, 4790. [Google Scholar] [CrossRef]
- Wang, Z.; Chao, N.; Chao, D. Using satellite altimetry leveling to assess the marine geoid. Geod. Geodyn. 2020, 11, 106–111. [Google Scholar] [CrossRef]
- Fan, D.; Li, S.; Li, X.; Yang, J.; Wan, X. Seafloor Topography Estimation from Gravity Anomaly and Vertical Gravity Gradient Using Nonlinear Iterative Least Square Method. Remote Sens. 2021, 13, 64. [Google Scholar] [CrossRef]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 global ocean tide atlas: Design and performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]
- Quartly, G.D. Removal of Covariant Errors from Altimetric Wave Height Data. Remote Sens. 2019, 11, 2319. [Google Scholar] [CrossRef] [Green Version]
- Yu, F.; Qi, J.; Jia, Y.; Chen, G. Evaluation of HY-2 Series Satellites Mapping Capability on Mesoscale Eddies. Remote Sens. 2022, 14, 4262. [Google Scholar] [CrossRef]
- Jiang, L.; Schneider, R.; Andersen, O.; Bauer-Gottwein, P. CryoSat-2 Altimetry Applications over Rivers and Lakes. Water 2017, 9, 211. [Google Scholar] [CrossRef]
- Jiang, L.; Nielsen, K.; Dinardo, S.; Andersen, O.B.; Bauer-Gottwein, P. Evaluation of Sentinel-3 SRAL SAR altimetry over Chinese rivers. Remote Sens. Environ. 2020, 237, 111546. [Google Scholar] [CrossRef]
- Jiang, L.; Nielsen, K.; Andersen, O.B.; Bauer-Gottwein, P. Monitoring recent lake level variations on the Tibetan Plateau using CryoSat-2 SARIn mode data. J. Hydrol. 2017, 544, 109–124. [Google Scholar] [CrossRef] [Green Version]
- Laxon, S.W.; Giles, K.A.; Ridout, A.L.; Wingham, D.J.; Willatt, R.; Cullen, R.; Kwok, R.; Schweiger, A.; Zhang, J.; Haas, C.; et al. CryoSat-2 estimates of Arctic sea ice thickness and volume. Geophys. Res. Lett. 2013, 40, 732–737. [Google Scholar] [CrossRef] [Green Version]
- Lawrence, I.R.; Armitage, T.W.K.; Tsamados, M.C.; Stroeve, J.C.; Dinardo, S.; Ridout, A.L.; Muir, A.; Tilling, R.L.; Shepherd, A. Extending the Arctic sea ice freeboard and sea level record with the Sentinel-3 radar altimeters. Adv. Space Res. 2021, 68, 711–723. [Google Scholar] [CrossRef]
- Kwok, R.; Cunningham, G.F. Variability of Arctic sea ice thickness and volume from CryoSat-2. Philos. Trans. A Math Phys. Eng. Sci. 2015, 373, 20140157. [Google Scholar] [CrossRef]
- Shepherd, A.; Ivins, E.R.; Geruo, A.; Barletta, V.R.; Bentley, M.J.; Bettadpur, S.; Briggs, K.H.; Bromwich, D.H.; Forsberg, R.; Galin, N.; et al. A Reconciled Estimate of Ice-Sheet Mass Balance. Science 2012, 338, 1183–1189. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, A.; Gilbert, L.; Muir, A.S.; Konrad, H.; McMillan, M.; Slater, T.; Briggs, K.H.; Sundal, A.V.; Hogg, A.E.; Engdahl, M.E. Trends in Antarctic Ice Sheet Elevation and Mass. Geophys. Res. Lett. 2019, 46, 8174–8183. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Shum, C.K.; Guo, J.; Duan, J.; Howat, I.; Yi, Y. High resolution Greenland ice sheet inter-annual mass variations combining GRACE gravimetry and Envisat altimetry. Earth Planet. Sc. Lett. 2015, 422, 11–17. [Google Scholar] [CrossRef]
- Raney, R.K. The Delay/Doppler Radar Altimeter. IEEE T. Geosci. Remote 1998, 5, 1578–1588. [Google Scholar] [CrossRef]
- Peng, F.; Deng, X. Validation of Sentinel-3A SAR mode sea level anomalies around the Australian coastal region. Remote Sens. Environ. 2020, 237, 111548. [Google Scholar] [CrossRef]
- Boy, F.; Desjonqueres, J.; Picot, N.; Moreau, T.; Raynal, M. CryoSat-2 SAR-Mode Over Oceans: Processing Methods, Global Assessment, and Benefits. Ieee T. Geosci. Remote. 2017, 55, 148–158. [Google Scholar] [CrossRef]
- Raynal, M.; Labroue, S.; Moreau, T.; Boy, F.; Picot, N. From conventional to Delay Doppler altimetry: A demonstration of continuity and improvements with the Cryosat-2 mission. Adv. Space Res. 2018, 62, 1564–1575. [Google Scholar] [CrossRef]
- Laforge, A.; Fleury, S.; Dinardo, S.; Garnier, F.; Remy, F.; Benveniste, J.; Bouffard, J.; Verley, J. Toward improved sea ice freeboard observation with SAR altimetry using the physical retracker SAMOSA+. Adv. Space Res. 2021, 68, 732–745. [Google Scholar] [CrossRef]
- McMillan, M.; Muir, A.; Shepherd, A.; Escolà, R.; Roca, M.; Aublanc, J.; Thibaut, P.; Restano, M.; Ambrozio, A.; Benveniste, J. Sentinel-3 Delay-Doppler altimetry over Antarctica. Cryosphere 2019, 13, 709–722. [Google Scholar] [CrossRef] [Green Version]
- Abileah, R.; Vignudelli, S. Precise inland surface altimetry (PISA) with nadir specular echoes from Sentinel-3: Algorithm and performance assessment. Remote Sens. Environ. 2021, 264, 112580. [Google Scholar] [CrossRef]
- Wingham, D.J.; Francis, C.R.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.W.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Donlon, C.J.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, C.R.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J. Validation of Sentinel-3A/3B Satellite Altimetry Wave Heights with Buoy and Jason-3 Data. Sensors 2019, 19, 2914. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Xu, Y.; Liu, B.; Lin, W.; He, Y.; Liu, J. Validation and Calibration of Nadir SWH Products From CFOSAT and HY-2B With Satellites and In Situ Observations. J. Geophys. Res. Ocean. 2021, 126, e2020JC016689. [Google Scholar] [CrossRef]
- Durden, S.; Vesecky, J. A physical radar cross-section model for a wind-driven sea with swell. Ieee J. Ocean. Eng. 1985, 10, 445–451. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. Roy. Meteor. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Bignalet-Cazalet, F.; Picot, N.; Desai, S.; Scharroo, R.; Egido, A. Jason-3 Products Handbook. Available online: https://www.aviso.altimetry.fr/fileadmin/documents/data/tools/hdbk_j3.pdf (accessed on 29 November 2022).
- Calafat, F.M.; Cipollini, P.; Bouffard, J.; Snaith, H.; Féménias, P. Evaluation of new CryoSat-2 products over the ocean. Remote Sens. Environ. 2017, 191, 131–144. [Google Scholar] [CrossRef]
- Jiang, M.; Xu, K.; Liu, Y. Calibration and Validation of Reprocessed HY-2A Altimeter Wave Height Measurements Using Data from Buoys, Jason-2, Cryosat-2, and SARAL/AltiKa. J. Atmos. Ocean. Tech. 2018, 35, 1331–1352. [Google Scholar] [CrossRef]
- Bronner, E.; Picot, N.; Carrère, L.; Desai, S.; Desjonquères, J.; Tran, N. Jason-1 Products Handbook. Available online: https://www.aviso.altimetry.fr/fileadmin/documents/data/tools/hdbk_j1_gdr.pdf (accessed on 29 November 2022).
- Jia, Y.; Yang, J.; Lin, M.; Zhang, Y.; Ma, C.; Fan, C. Global Assessments of the HY-2B Measurements and Cross-Calibrations with Jason-3. Remote Sens. 2020, 12, 2470. [Google Scholar] [CrossRef]
- Dibarboure, G.; Boy, F.; Desjonqueres, J.D.; Labroue, S.; Lasne, Y.; Picot, N.; Poisson, J.C.; Thibaut, P. Investigating Short-Wavelength Correlated Errors on Low-Resolution Mode Altimetry. J. Atmos. Ocean. Tech. 2014, 31, 1337–1362. [Google Scholar] [CrossRef] [Green Version]
- Ablain, M.; Philipps, S.; Picot, N.; Bronner, E. Jason-2 Global Statistical Assessment and Cross-Calibration with Jason-1. Mar. Geod. 2010, 33, 162–185. [Google Scholar] [CrossRef]
- Zanifé, O.Z.; Vincent, P.; Amarouche, L.; Dumont, J.P.; Thibaut, P.; Labroue, S. Comparison of the Ku-Band Range Noise Level and the Relative Sea-State Bias of the Jason-1, TOPEX, and Poseidon-1 Radar Altimeters. Mar. Geod. 2003, 26, 201–238. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Jia, Y.; Fan, C.; Cui, W. Validation of Sentinel-3A/3B and Jason-3 Altimeter Wind Speeds and Significant Wave Heights Using Buoy and ASCAT Data. Remote Sens. 2020, 12, 2079. [Google Scholar] [CrossRef]
- Moreau, T.; Tran, N.; Aublanc, J.; Tison, C.; Le Gac, S.; Boy, F. Impact of long ocean waves on wave height retrieval from SAR altimetry data. Adv. Space Res. 2018, 62, 1434–1444. [Google Scholar] [CrossRef]
- Boisot, O.; Amarouche, L.; Lalaurie, J.; Guérin, C. Dynamical Properties of Sea Surface Microwave Backscatter at Low-Incidence: Correlation Time and Doppler Shift. Ieee T. Geosci. Remote. 2016, 54, 7385–7395. [Google Scholar] [CrossRef]
- Egido, A.; Ray, C. Impact of the Ocean Waves Motion on the Delay-Doppler Altimeters Measurements. Available online: https://ostst.aviso.altimetry.fr/fileadmin/user_upload/2019/IPM_03_Egido20191022_-_OSTST_-_AEE.pdf (accessed on 29 November 2022).
- Amarouche, L.; Tran, N.; Boy, F. Impact of the Ocean Waves on the Delay/Doppler Altimeters: Analysis Using Real Sentinel-3 Data. Available online: https://ostst.aviso.altimetry.fr/fileadmin/user_upload/tx_ausyclsseminar/files/TranetAl_DopplerWaves_DataAnalysis_OSTST_2020.pdf (accessed on 29 November 2022).
- Buchhaupt, C.; Fenoglio, L.; Becker, M.; Kusche, J.R. Impact of vertical water particle motions on focused SAR altimetry. Adv. Space Res. 2021, 68, 853–874. [Google Scholar] [CrossRef]
- Xu, X.; Xu, K.; Jiang, M.; Geng, B.; Shi, L. Investigation of the Anisotropic Patterns in the Altimeter Backscatter Measurements Over Ocean Wave Surfaces. Front. Earth Sci. 2021, 9, 1–14. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Inclination (°) | Repeat Period (days) | Data Type | Radar Mode | Source |
|---|---|---|---|---|---|
| Sentinel-6 | 66.0 | 9.9 | L2 NTC | SAR (Open Burst) /LRM | EUMETSAT |
| Sentinel-3A | 98.6 | 27 | L2 NTC | SAR (Closed Burst) | EUMETSAT |
| Sentinel-3B | 98.6 | 27 | L2 NTC | SAR (Closed Burst) | EUMETSAT |
| Jason-3 | 66.0 | 9.9 | GDR-F | LRM | AVISO |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, M.; Xu, K.; Wang, J. Evaluation of Sentinel-6 Altimetry Data over Ocean. Remote Sens. 2023, 15, 12. https://doi.org/10.3390/rs15010012
Jiang M, Xu K, Wang J. Evaluation of Sentinel-6 Altimetry Data over Ocean. Remote Sensing. 2023; 15(1):12. https://doi.org/10.3390/rs15010012
Chicago/Turabian StyleJiang, Maofei, Ke Xu, and Jiaming Wang. 2023. "Evaluation of Sentinel-6 Altimetry Data over Ocean" Remote Sensing 15, no. 1: 12. https://doi.org/10.3390/rs15010012