
Satellite and In Situ Sampling Mismatches: Consequences for the Estimation of Satellite Sea Surface Salinity Uncertainties

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
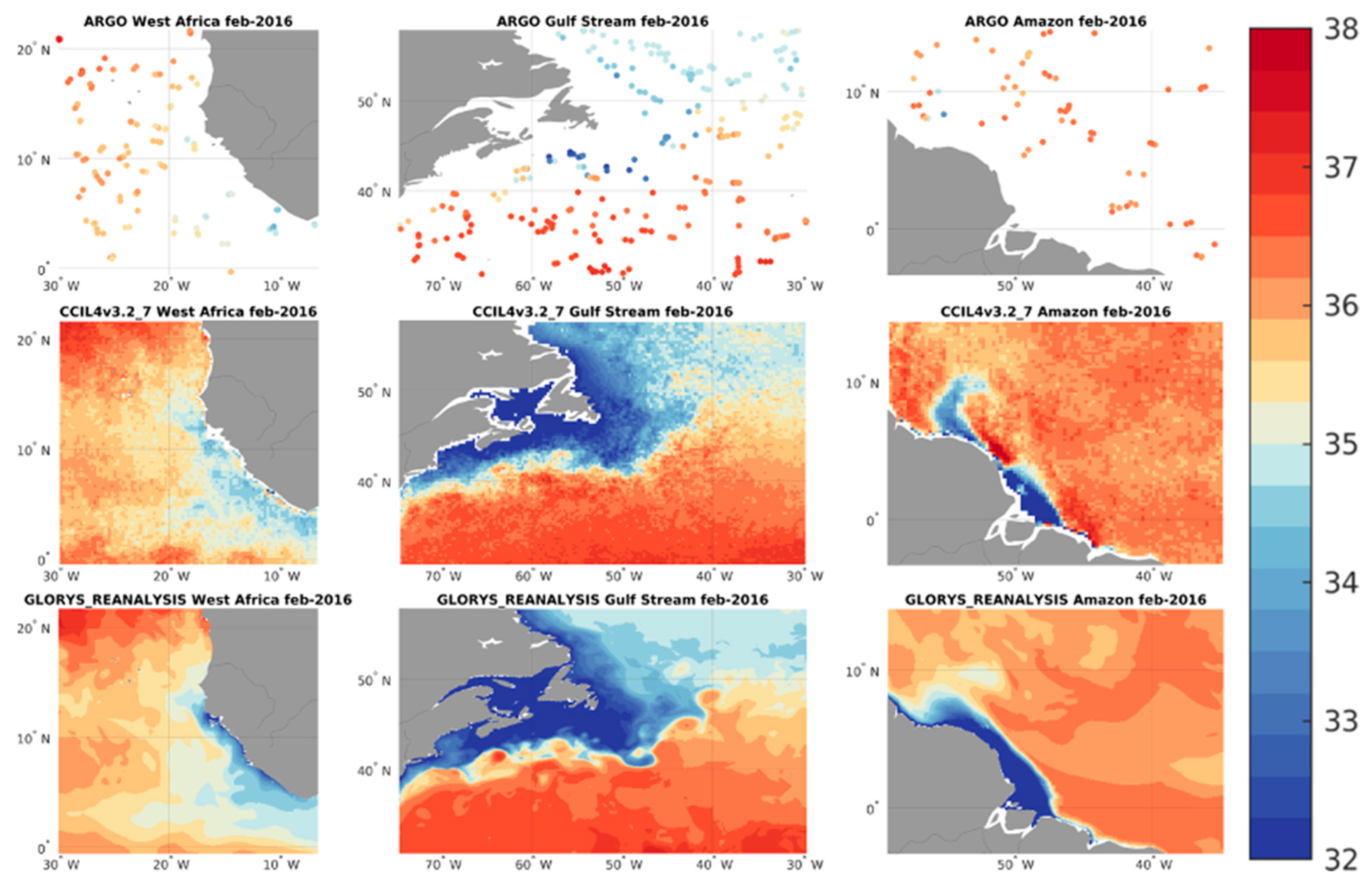
2.1. Materials
- -
- Satellite product: CCI v3.2.
- -
- Instead of using SMOS SSS produced by the Centre Aval de Traitement des Données SMOS (CATDS) operational chain, the SMOS SSS were reprocessed with a modified ESA v662 processor [15].
- -
- Instead of using European Center for Medium Weather Forecast (ECMWF) Integrated Forecast System (IFS) fields as auxiliary parameters, the processing used ECMWF ERA5 fields.
- -
- The SMOS vicarious calibration, the so-called Ocean Target Transformation, is estimated using in situ interpolated SSS fields produced by the In Situ Analysis System (ISAS) [18] instead of using a salinity climatology.
- -
- The dielectric constant model is updated as proposed by [5].
- -
- The SMOS SSS affected by instantaneous rain rate are adjusted for RR up to 10 mm h−1 [19] and are sorted out in case of stronger RR. SMAP SSS retrieved with RR larger than 0.5 mm h−1 are filtered out. Therefore, in rainy regions the CCI v3 fields are close to bulk salinities.
- -
- In the CCI v3 L4 optimal interpolation, a full least square propagation of the errors is implemented, instead of a simplified propagation.
- -
- Representativity uncertainties between the swath measurements of the SMOS and SMAP level 2 SSS and that of the L4 estimated SSS (weekly or monthly fields), corresponding to the temporal variability of the SSS at the SMOS and SMAP resolution (~50 km), within one week or one month, are taken into account as described in [5] and in its Supplementary Information (S3). The equations are the same for CCI version 2 and version 3, but the numerical implementation differs: a full error propagation scheme has been implemented in version 3.
- -
- In-situ products: Argo floats
- -
- Mercator GLORYS reanalysis
2.2. Methods
- -
- Uncertainties balance
- -
- -
- -
- -
- -
- -
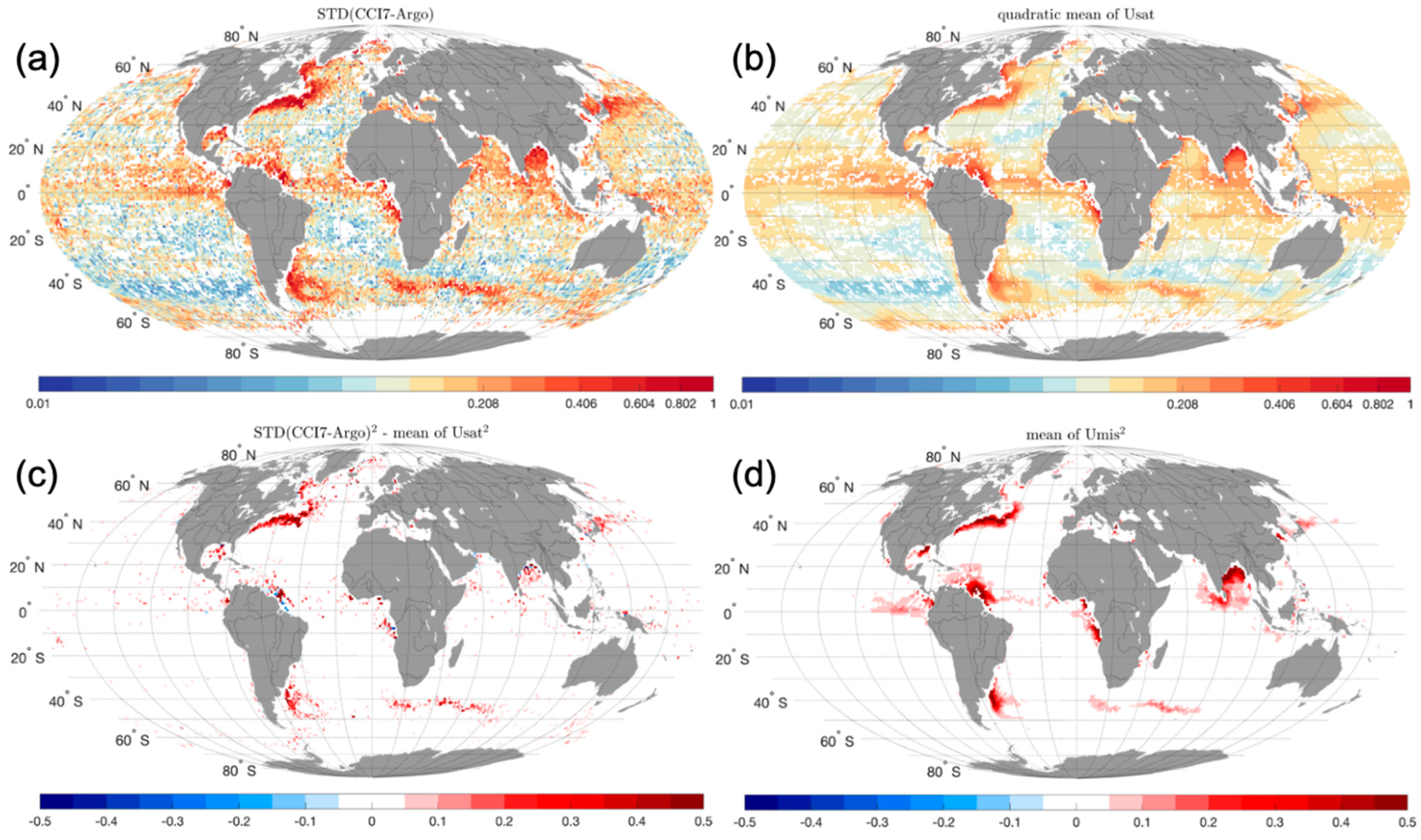
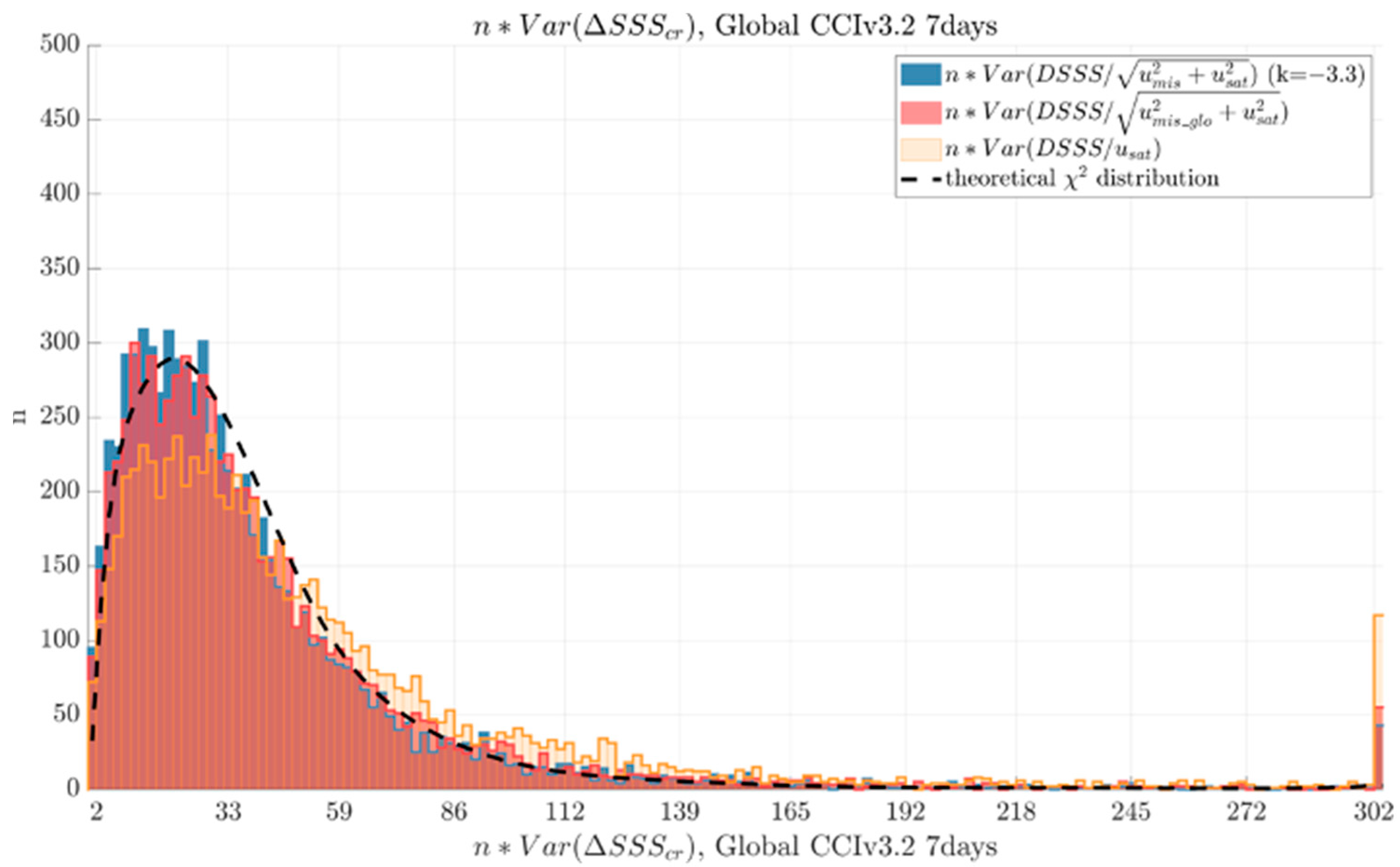
- In order to make local analysis, we also compute STD of normalized differences in 2° boxes. However, due to the reduced number of colocations in 2° boxes (as will be seen in Section 3.2.2), they are noisy and it is not possible to estimate a reliable fit of the normalized differences distribution in each box. Nevertheless, we look at to which extent the statistical distribution of STD estimated in 2° boxes is consistent with Gaussian distributions of the normalized differences in each box. This is performed by considering the histograms of the variances, STD2, multiplied by the number of measurements. Indeed, given X1, ⋯, Xn a random sample from a Gaussian distribution (with a μ average and a σ standard deviation) N(μ,σ2), in any of the 2° boxes, with , the random variable Y = (n−1)S2/σ2 = n Var(X)/σ2 follows a χ2n−1 distribution (See p. 211 of [27]). This choice of representation allows us to compare the histograms obtained to a theoretical curve that Y should follow if the normalized differences distributions in each box followed a N(0,1) distribution, as is expected if the uncertainties are correctly estimated. The theoretical curve is deduced by cumulating the distributions of the Y term expected for each of the 2° boxes, considering σ = 1.
3. Results
3.1. The Different Contributions to the Uncertainty Balance
3.2. Detailed Analysis of Uncertainties Balance
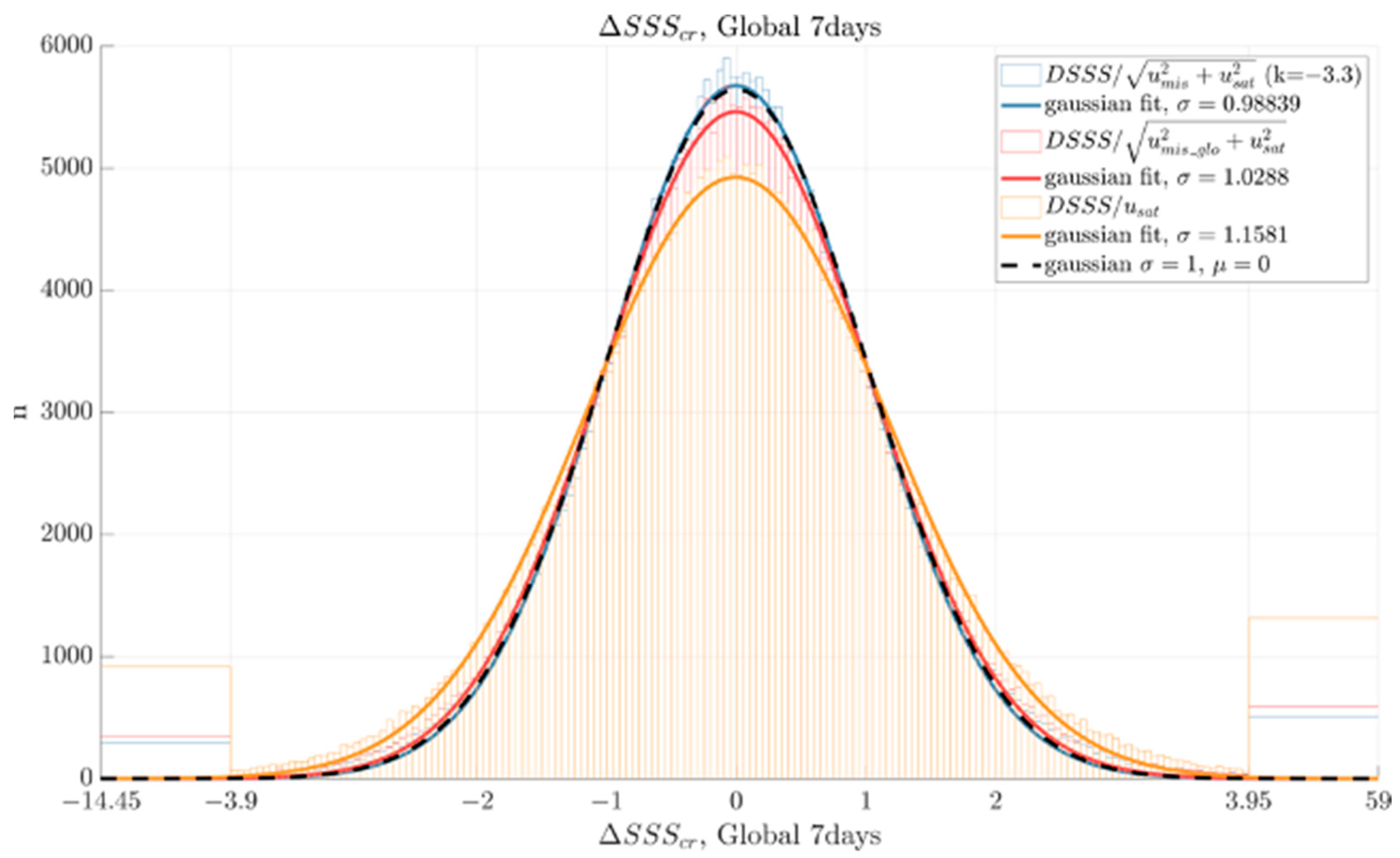
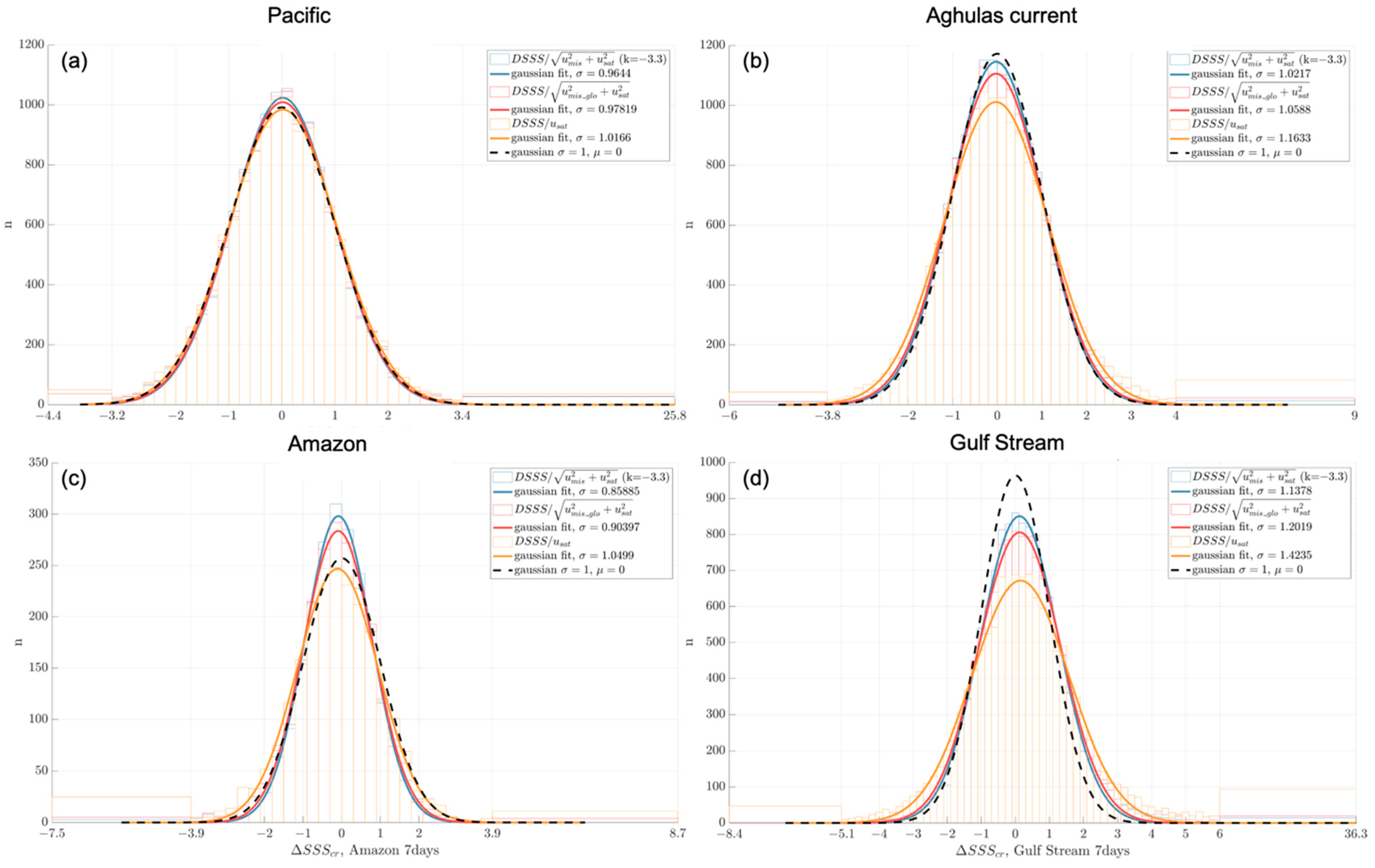
3.2.1. Distribution of Reduced Differences
- (a)
- The satellite uncertainty Usat only (orange curves);
- (b)
- The quadratic mean of Usat and Umis_glo (red curves); and
- (c)
- The quadratic mean of Usat and Umis (blue curves).
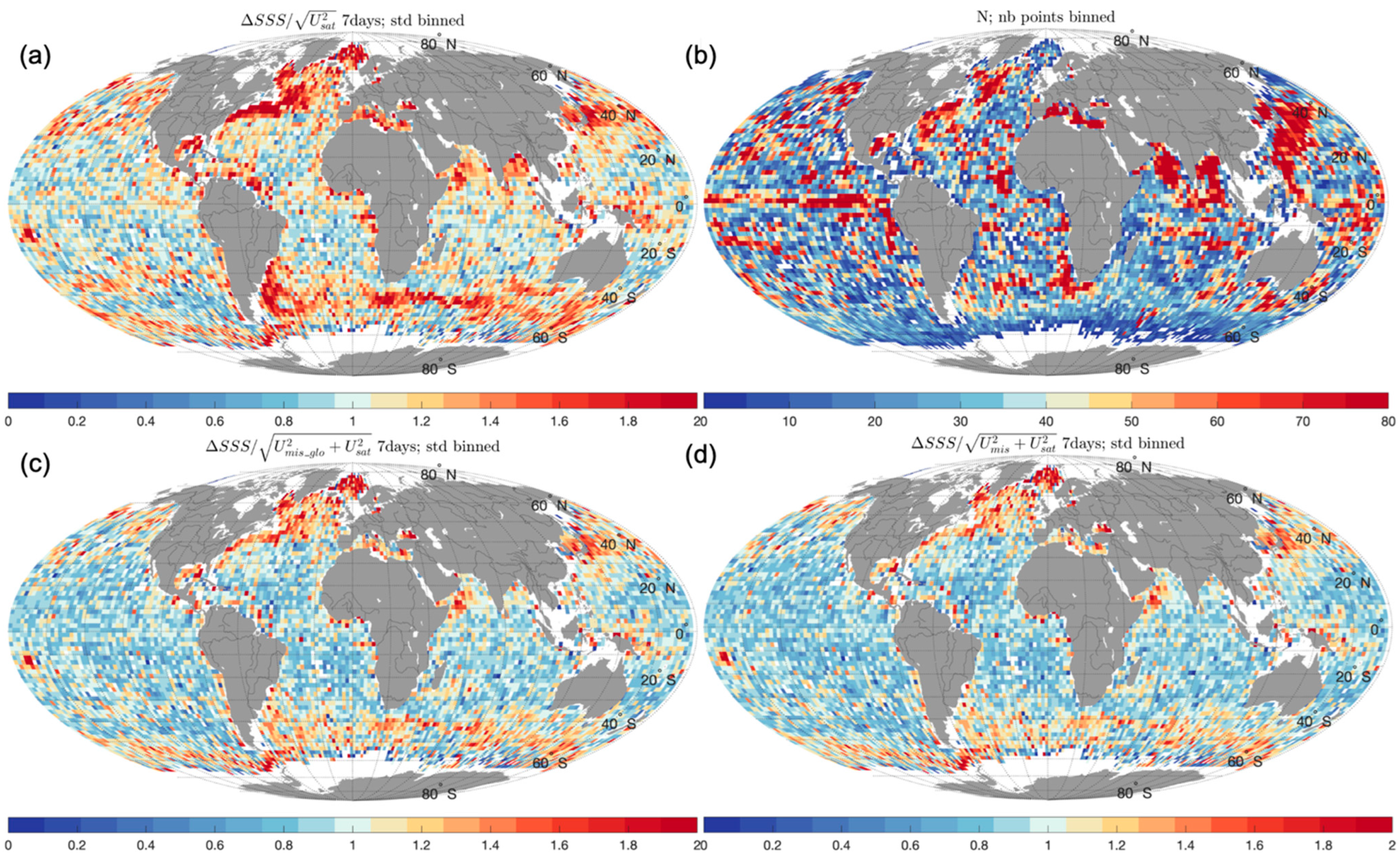
3.2.2. Global Distributions
4. Discussion
4.1. Estimation of the Sampling Mismatch Uncertainty
4.2. Sampling Mismatch Uncertainty and Representativity Uncertainty Included in Usat
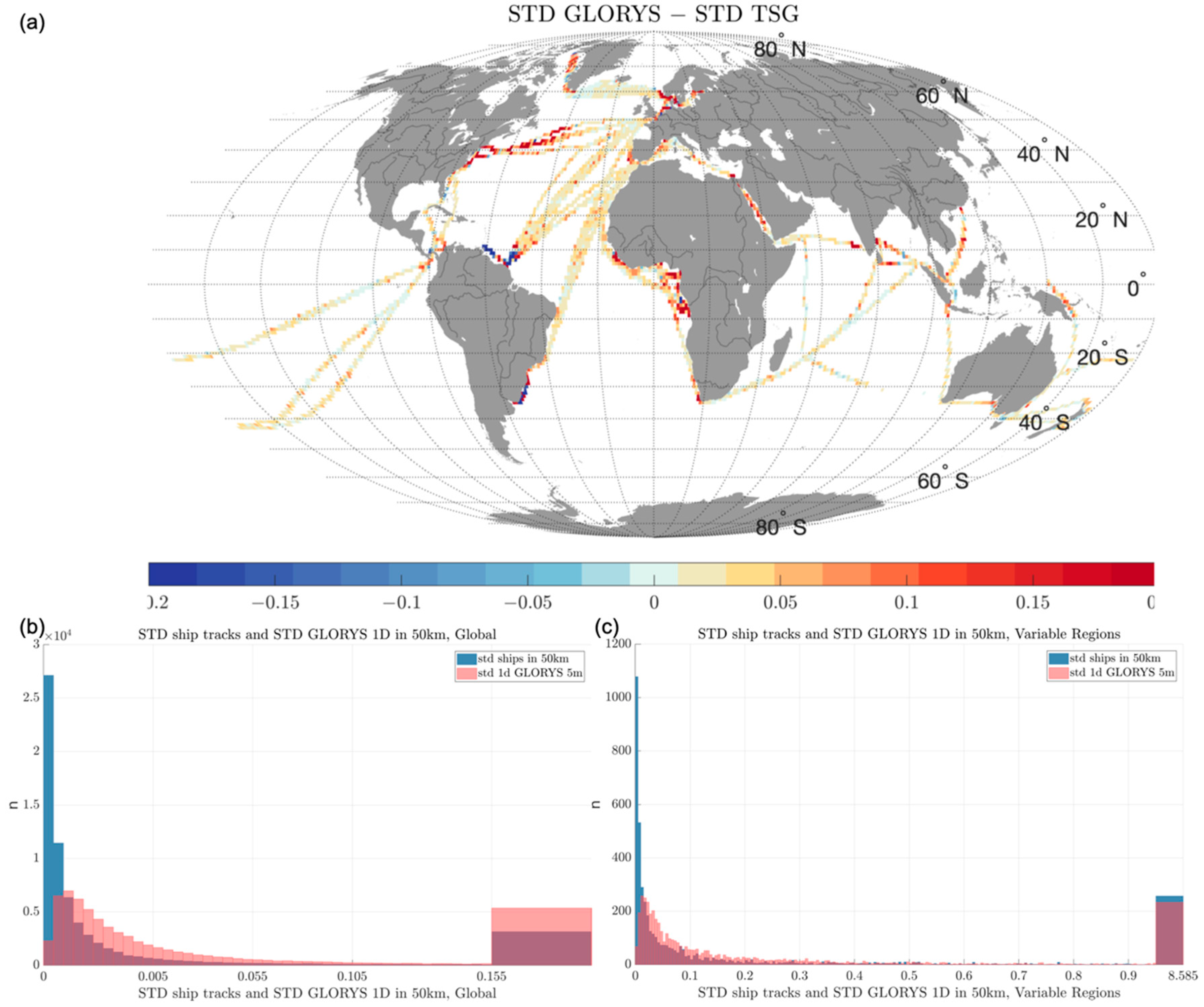
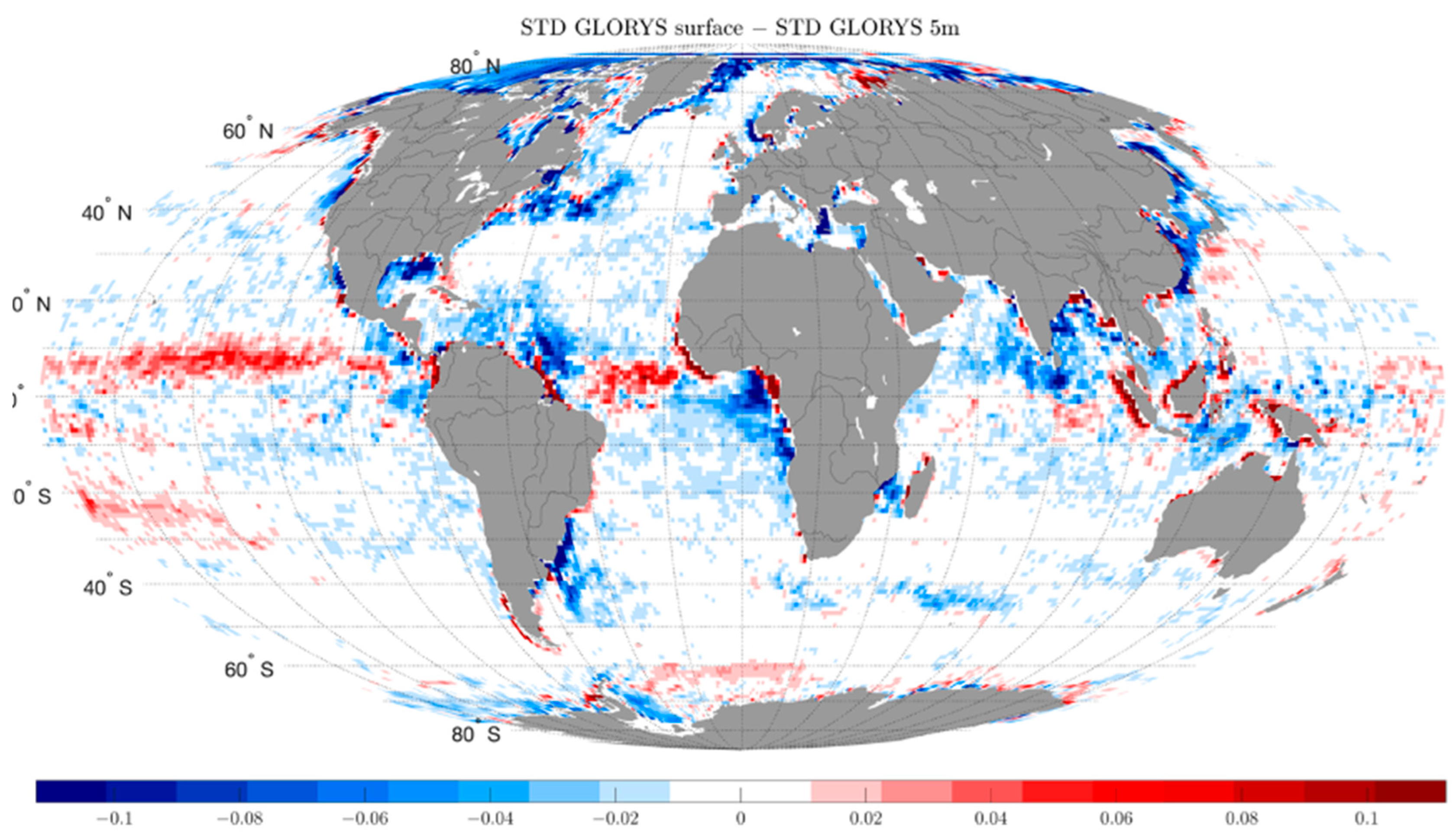
4.3. Vertical Near-Surface Variability
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Li, G.; Cheng, L.; Zhu, J.; Trenberth, K.E.; Mann, M.E.; Abraham, J.P. Increasing ocean stratification over the past half-century. Nat. Clim. Chang. 2020, 10, 1116–1123. [Google Scholar] [CrossRef]
- Bindoff, N.L.; Cheung, W.W.L.; Kairo, J.G.; Arístegui, J.; Guinder, V.A.; Hallberg, R.; Hilmi, N.J.M.; Jiao, N.; Karim, M.S.; Levin, L.; et al. Changing ocean, marine ecosystems, and dependent communities. In IPCC Special Report on the Ocean and Cryosphere in a Changing Climate; Intergovernmental Panel on Climate Change: Geneva, Switzerland, 2019; pp. 477–587. [Google Scholar]
- Reul, N.; Grodsky, S.; Arias, M.; Boutin, J.; Catany, R.; Chapron, B.; D’Amico, F.; Dinnat, E.; Donlon, C.; Fore, A.; et al. Sea surface salinity estimates from spaceborne L-band radiometers: An overview of the first decade of observation (2010–2019). Remote Sens. Environ. 2020, 242, 111769. [Google Scholar] [CrossRef]
- Vinogradova, N.; Lee, T.; Boutin, J.; Drushka, K.; Fournier, S.; Sabia, R.; Stammer, D.; Bayler, E.; Reul, N.; Gordon, A.; et al. Satellite Salinity Observing System: Recent Discoveries and the Way Forward. Front. Mar. Sci. 2019, 6, 243. [Google Scholar] [CrossRef]
- Boutin, J.; Reul, N.; Koehler, J.; Martin, A.; Catany, R.; Guimbard, S.; Rouffi, F.; Vergely, J.L.; Arias, M.; Chakroun, M.; et al. Satellite-Based Sea Surface Salinity Designed for Ocean and Climate Studies. J. Geophys. Res. Oceans 2021, 126, e2021JC017676. [Google Scholar] [CrossRef]
- Martin, A.C.H.; Guimbard, S.; Koehler, J.; Akhil, V.P.; Vialard, J.; Houdegnonto, O.; Kolodziejczyk, N.; Boutin, J.; Reul, N.; Catany, R. Climate Change Initiative+ (CCI+) Phase 1 Sea Surface Salinity: Product Validation and Intercomparison Report (PVIR) Version 3.0. 2021. Available online: http://nora.nerc.ac.uk/id/eprint/531913 (accessed on 13 February 2022).
- Merchant, C.J.; Paul, F.; Popp, T.; Ablain, M.; Bontemps, S.; Defourny, P.; Hollmann, R.; Lavergne, T.; Laeng, A.; de Leeuw, G.; et al. Uncertainty information in climate data records from Earth observation. Earth Syst. Sci. Data 2017, 9, 511–527. [Google Scholar] [CrossRef] [Green Version]
- Boutin, J.; Chao, Y.; Asher, W.E.; Delcroix, T.; Drucker, R.; Drushka, K.; Kolodziejczyk, N.; Lee, T.; Reul, N.; Reverdin, G.; et al. Satellite and In Situ Salinity: Understanding Near-Surface Stratification and Subfootprint Variability. Bull. Am. Meteorol. Soc. 2016, 97, 1391–1407. [Google Scholar] [CrossRef] [Green Version]
- Vinogradova, N.T.; Ponte, R.M. Small-Scale Variability in Sea Surface Salinity and Implications for Satellite-Derived Measurements. J. Atmos. Ocean. Technol. 2013, 30, 2689–2694. [Google Scholar] [CrossRef]
- Bingham, F.; Fournier, S.; Brodnitz, S.; Ulfsax, K.; Zhang, H. Matchup Characteristics of Sea Surface Salinity Using a High-Resolution Ocean Model. Remote Sens. 2021, 13, 2995. [Google Scholar] [CrossRef]
- Bingham, F.; Li, Z. Spatial Scales of Sea Surface Salinity Subfootprint Variability in the SPURS Regions. Remote Sens. 2020, 12, 3996. [Google Scholar] [CrossRef]
- D’Addezio, J.M.; Bingham, F.; Jacobs, G.A. Sea surface salinity subfootprint variability estimates from regional high-resolution model simulations. Remote Sens. Environ. 2019, 233, 111365. [Google Scholar] [CrossRef]
- Bingham, F.M.; Brodnitz, S.; Fournier, S.; Ulfsax, K.; Hayashi, A.; Zhang, H. Sea Surface Salinity Subfootprint Variability from a Global High-Resolution Model. Remote Sens. 2021, 13, 4410. [Google Scholar] [CrossRef]
- Boutin, J.; Vergely, J.-L.; Reul, N.; Catany, R.; Koehler, J.; Martin, A.C.H.; Rouffi, F.; Arias, M.; Chakroun, M.; Corato, G.; et al. ESA Sea Surface Salinity Climate Change Initiative (Sea_Surface_Salinity_cci): Weekly and Monthly Sea Surface Salinity Product, v03.21, from 2010 to 2020. NERC EDS Centre for Environmental Data Analysis, 23 December 2021. Available online: http://dx.doi.org/10.5285/5920a2c77e3c45339477acd31ce62c3c (accessed on 13 February 2022).
- Perrot, X.; Boutin, J.; Vergely, J.L.; Rouffi, F.; Martin, A.; Guimbard, S.; Koehler, J.; Reul, N.; Catany, R.; Cipollini, P.; et al. CCI+SSS, A New SMOS L2 Reprocessing Reduces Errors on Sea Surface Salinity Time Series. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Brussels, Belgium, 11–16 July 2021; pp. 7457–7460. [Google Scholar] [CrossRef]
- Vergely, J.L.; Reul, N.; Chakroun, M.; Catany, R.; Cipollini, P. Climate Change Initiative+ (CCI+) Phase 1: Sea Surface Salinity: Algorithm Theoretical Development Basis Document (ATBD). 2021, p. 85. Available online: https://dap.ceda.ac.uk/neodc/esacci/sea_surface_salinity/docs/v03.21/SSS_cci-D2.3-ATBD-v3.1.pdf (accessed on 13 February 2022).
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. EASE-Grid 2.0: Incremental but Significant Improvements for Earth-Gridded Data Sets. ISPRS Int. J. Geo-Inf. 2012, 1, 32–45. [Google Scholar] [CrossRef] [Green Version]
- Gaillard, F.; Reynaud, T.; Thierry, V.; Kolodziejczyk, N.; Von Schuckmann, K. In Situ–Based Reanalysis of the Global Ocean Temperature and Salinity with ISAS: Variability of the Heat Content and Steric Height. J. Clim. 2016, 29, 1305–1323. [Google Scholar] [CrossRef]
- Supply, A.; Boutin, J.; Reverdin, G.; Vergely, J.L.; Bellenger, H. Variability of Satellite Sea Surface Salinity Under Rainfall. In Satellite Precipitation Measurement; Levizzani, V., Kidd, C., Kirschbaum, D.B., Kummerow, C.D., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 2, pp. 1155–1176. [Google Scholar]
- ARGO. Argo Float Data and Metadata from Global Data Assembly Centre (Argo GDAC). SEANOE. Available online: https://doi.org/10.17882/42182 (accessed on 13 February 2022). [CrossRef]
- Guimbard, S.; Reul, N.; Sabia, R.; Herlédan, S.; Khoury Hanna, Z.E.; Piollé, J.-F.; Paul, F.; Lee, T.; Schanze, J.J.; Bingham, F.M.; et al. The Salinity Pilot-Mission Exploitation Platform (Pi-MEP): A Hub for Validation and Exploitation of Satellite Sea Surface Salinity Data. Remote Sens. 2021, 13, 4600. [Google Scholar] [CrossRef]
- Kolodziejczyk, N.; Hernandez, O.; Boutin, J.; Reverdin, G. SMOS salinity in the subtropical North Atlantic salinity maximum: 2. Two-dimensional horizontal thermohaline variability. J. Geophys. Res. Oceans 2015, 120, 972–987. [Google Scholar] [CrossRef] [Green Version]
- Lellouche, J.-M.; Greiner, E.; Le Galloudec, O.; Garric, G.; Regnier, C.; Drevillon, M.; Benkiran, M.; Testut, C.-E.; Bourdalle-Badie, R.; Gasparin, F.; et al. Recent updates to the Copernicus Marine Service global ocean monitoring and forecasting real-time 1∕12° high-resolution system. Ocean Sci. 2018, 14, 1093–1126. [Google Scholar] [CrossRef] [Green Version]
- Lellouche, J.M.; Greiner, E.; Bourdalle-Badie, R.; Garric, G.; Angelique, M.; Drevillon, M.; Bricaud, C.; Hamon, M.; Le Galloudec, O.; Regnier, C.; et al. The Copernicus Global 1/12° Oceanic and Sea Ice GLORYS12 Reanalysis. Front. Earth Sci. 2021, 9, 585. [Google Scholar]
- Bingham, F.; Brodnitz, S.; Yu, L. Sea Surface Salinity Seasonal Variability in the Tropics from Satellites, Gridded In Situ Products and Mooring Observations. Remote Sens. 2020, 13, 110. [Google Scholar] [CrossRef]
- Wong, A.P.S.; Wijffels, S.E.; Riser, S.C.; Pouliquen, S.; Hosoda, S.; Roemmich, D.; Gilson, J.; Johnson, G.C.; Martini, K.; Murphy, D.J.; et al. Argo Data 1999–2019: Two Million Temperature-Salinity Profiles and Subsurface Velocity Observations from a Global Array of Profiling Floats. Front. Mar. Sci. 2020, 7, 700. [Google Scholar] [CrossRef]
- Emery, W.J.; Thomson, R.E. (Eds.) Statistical Methods and Error Handling. In Data Analysis Methods in Physical Oceanography; Elsevier Science: Amsterdam, The Netherlands, 2001; pp. 193–304. [Google Scholar]
- Alory, G.; Delcroix, T.; Téchiné, P.; Diverrès, D.; Varillon, D.; Cravatte, S.; Gouriou, Y.; Grelet, J.; Jacquin, S.; Kestenare, E.; et al. The French contribution to the voluntary observing ships network of sea surface salinity. Deep Sea Res. Part I Oceanogr. Res. Pap. 2015, 105, 1–18. [Google Scholar] [CrossRef]
- Dai, A.; Qian, T.; Trenberth, K.E.; Milliman, J.D. Changes in Continental Freshwater Discharge from 1948 to 2004. J. Clim. 2009, 22, 2773–2792. [Google Scholar] [CrossRef]
- Martin, M.J.; Remy, E.; Tranchant, B.; King, R.R.; Greiner, E.; Donlon, C. Observation impact statement on satellite sea surface salinity data from two operational global ocean forecasting systems. J. Oper. Oceanogr. 2020, 1–17. [Google Scholar] [CrossRef]
- Chassignet, E.P.; Xu, X. Impact of Horizontal Resolution (1/12° to 1/50°) on Gulf Stream Separation, Penetrtion, and Variability. J. Phys. Oceanogr. 2017, 47, 1999–2021. [Google Scholar] [CrossRef]
- Supply, A.; Boutin, J.; Vergely, J.-L.; Martin, N.; Hasson, A.; Reverdin, G.; Mallet, C.; Viltard, N. Precipitation Estimates from SMOS Sea-Surface Salinity. Q. J. R. Meteorol. Soc. 2018, 144 (Suppl. S1), 103–119. [Google Scholar] [CrossRef] [Green Version]
- Houndegnonto, O.J.; Kolodziejczyk, N.; Maes, C.; Bourlès, B.; Da-Allada, C.Y.; Reul, N. Seasonal Variability of Freshwater Plumes in the Eastern Gulf of Guinea as Inferred from Satellite Measurements. J. Geophys. Res. Oceans 2021, 126. [Google Scholar] [CrossRef]
- PIMEP Matchups Database. Available online: https://pimep.ifremer.fr/diffusion/data/ (accessed on 13 February 2022).
- PIMEP Matchups Reports. Available online: https://www.salinity-pimep.org/reports/mdb.html (accessed on 13 February 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
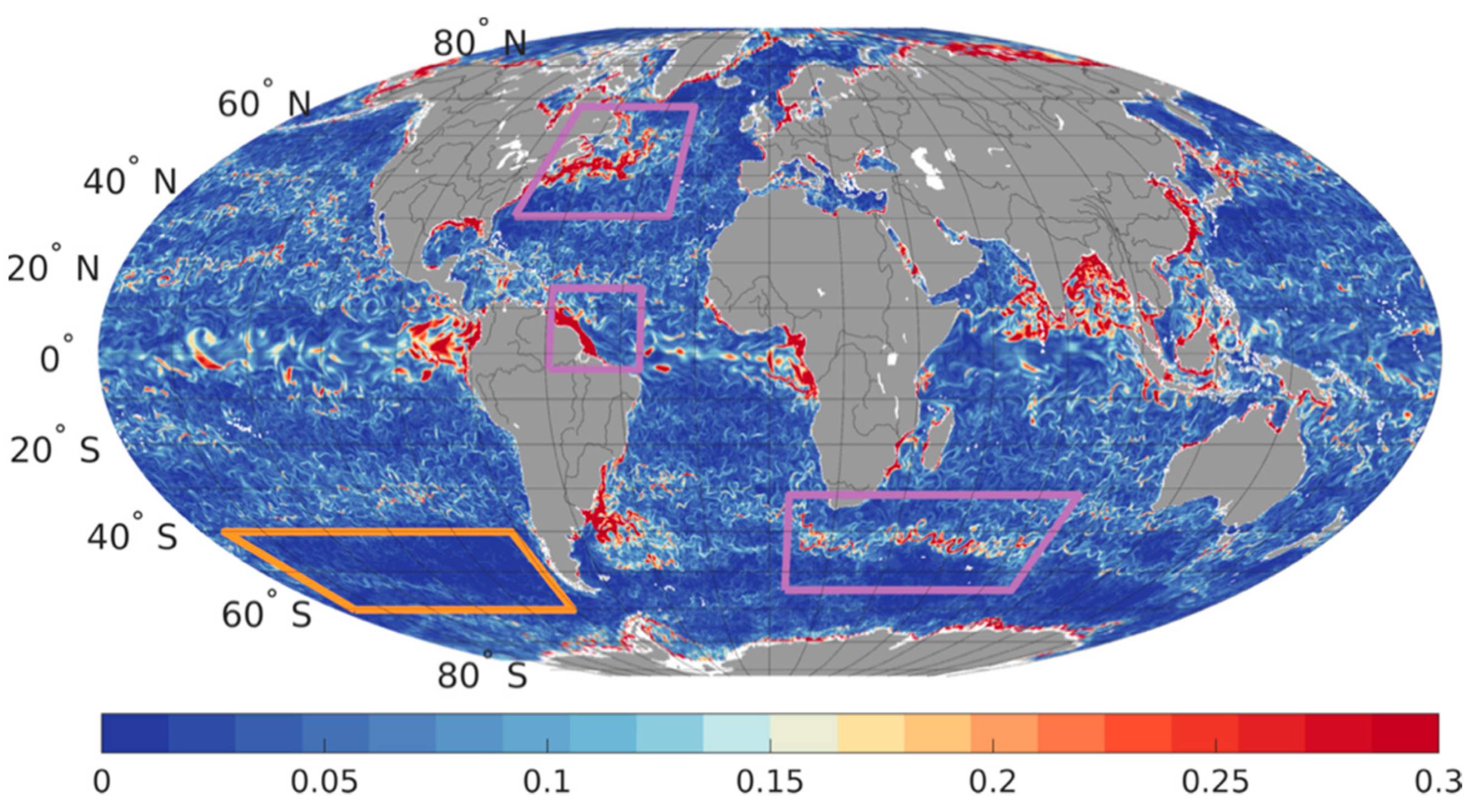
| Region | Latitude (°) | Longitude (°) | Very Variable Area | ||
|---|---|---|---|---|---|
| Gulf Stream | 30.52 | 57.64 | −74.83 | −29.70 | X |
| Amazon plume | −3.43 | 14.37 | −59.27 | −34.89 | X |
| Agulhas return current | −54.84 | −31.43 | 5.84 | 91.43 | X |
| South Pacific Ocean | −60.27 | −40.10 | −172.35 | −81.57 | |
| Region | Usat | Usat + Umis_glo | Usat + Umis |
|---|---|---|---|
| Global | 1.158 | 1.029 | 0.988 |
| Gulf Stream | 1.424 | 0.904 | 1.138 |
| Amazon plume | 1.050 | 1.202 | 0.859 |
| Agulhas return current | 1.163 | 1.059 | 1.022 |
| South Pacific Ocean | 1.017 | 0.978 | 0.964 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thouvenin-Masson, C.; Boutin, J.; Vergely, J.-L.; Reverdin, G.; Martin, A.C.H.; Guimbard, S.; Reul, N.; Sabia, R.; Catany, R.; Hembise Fanton-d’Andon, O. Satellite and In Situ Sampling Mismatches: Consequences for the Estimation of Satellite Sea Surface Salinity Uncertainties. Remote Sens. 2022, 14, 1878. https://doi.org/10.3390/rs14081878
Thouvenin-Masson C, Boutin J, Vergely J-L, Reverdin G, Martin ACH, Guimbard S, Reul N, Sabia R, Catany R, Hembise Fanton-d’Andon O. Satellite and In Situ Sampling Mismatches: Consequences for the Estimation of Satellite Sea Surface Salinity Uncertainties. Remote Sensing. 2022; 14(8):1878. https://doi.org/10.3390/rs14081878
Chicago/Turabian StyleThouvenin-Masson, Clovis, Jacqueline Boutin, Jean-Luc Vergely, Gilles Reverdin, Adrien C. H. Martin, Sébastien Guimbard, Nicolas Reul, Roberto Sabia, Rafael Catany, and Odile Hembise Fanton-d’Andon. 2022. "Satellite and In Situ Sampling Mismatches: Consequences for the Estimation of Satellite Sea Surface Salinity Uncertainties" Remote Sensing 14, no. 8: 1878. https://doi.org/10.3390/rs14081878