
Multi-Source Precipitation Data Merging for Heavy Rainfall Events Based on Cokriging and Machine Learning Methods

 , ,
, ,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Study Area and Data Sources
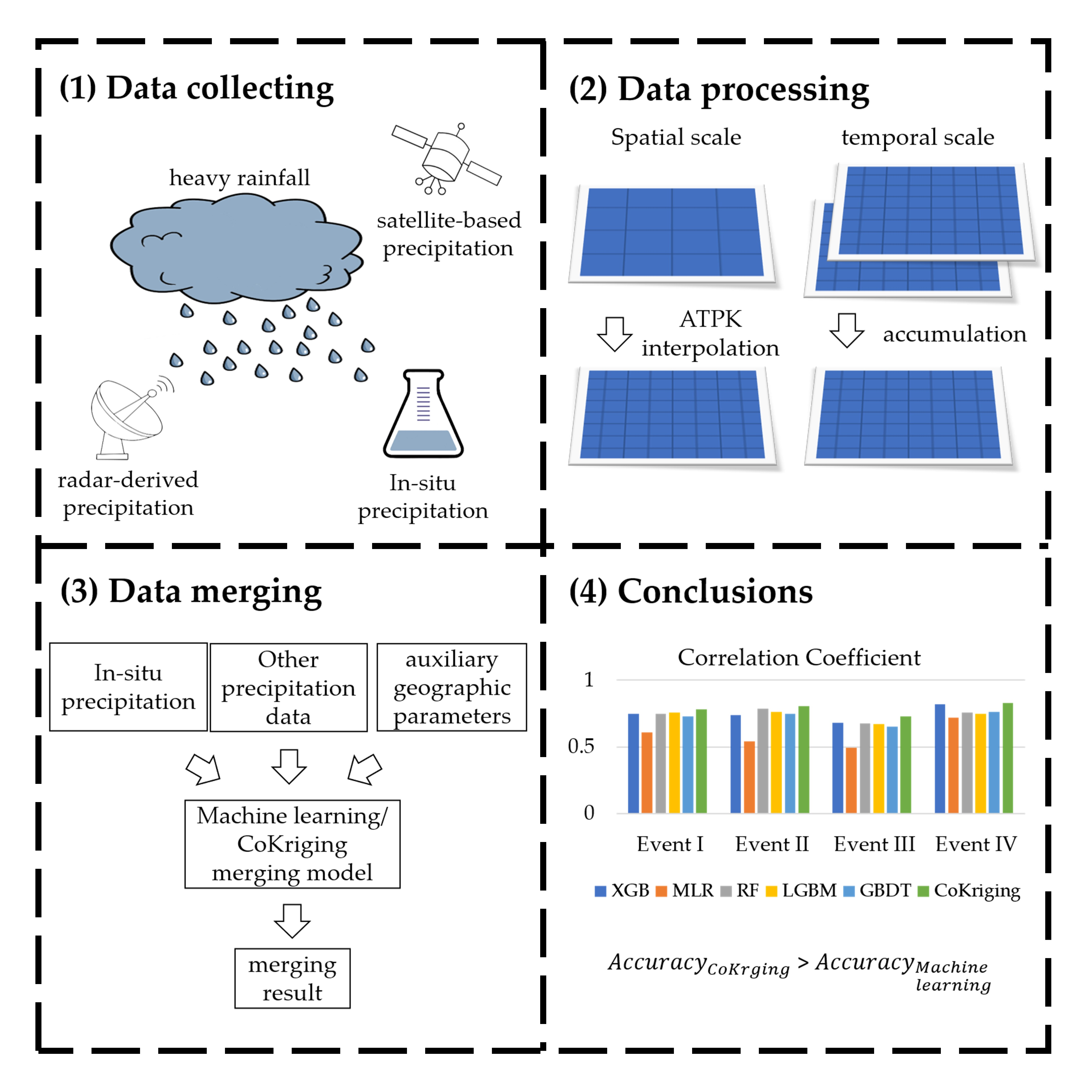
Overview of the Study Area
2.2. Research Data
2.2.1. Precipitation Data
2.2.2. Auxiliary Geographic Parameters
2.3. Methodology
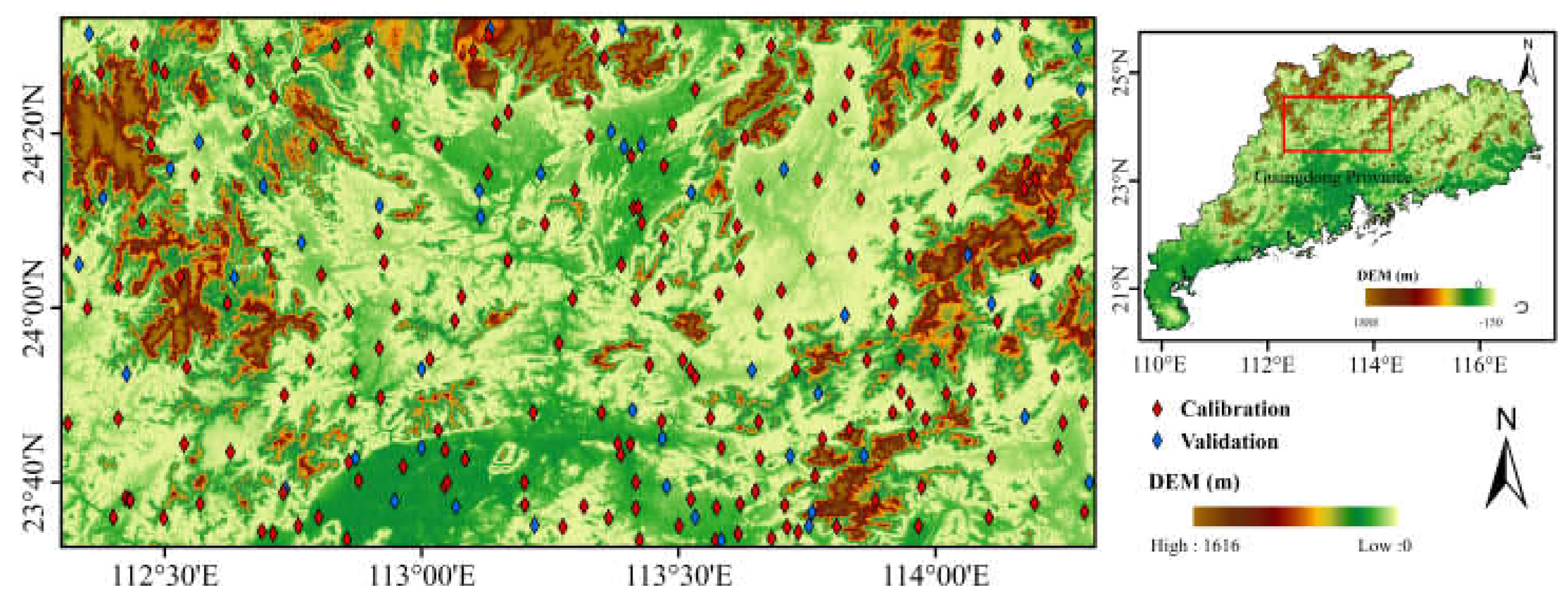
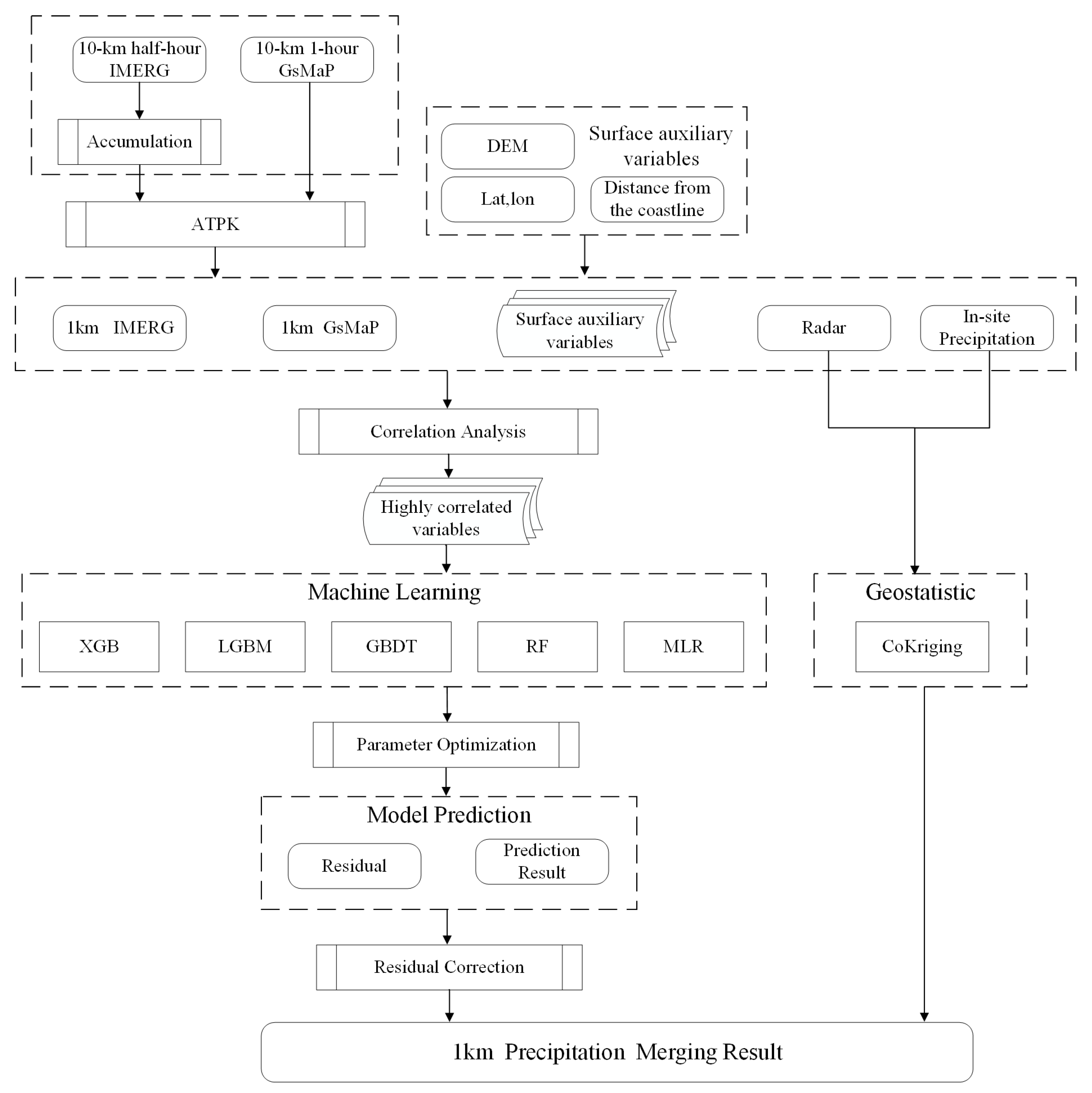
2.3.1. Multi-Source Precipitation Data Merging Methods
2.3.2. Machine Learning-Based Hourly Precipitation Data Merging Models
2.3.3. GBDT
2.3.4. XGBoost
2.3.5. LightGBM
2.3.6. RF
2.3.7. MLR
2.4. CoKriging-Based Hourly Precipitation Merging Model
2.5. Evaluation Method
3. Results
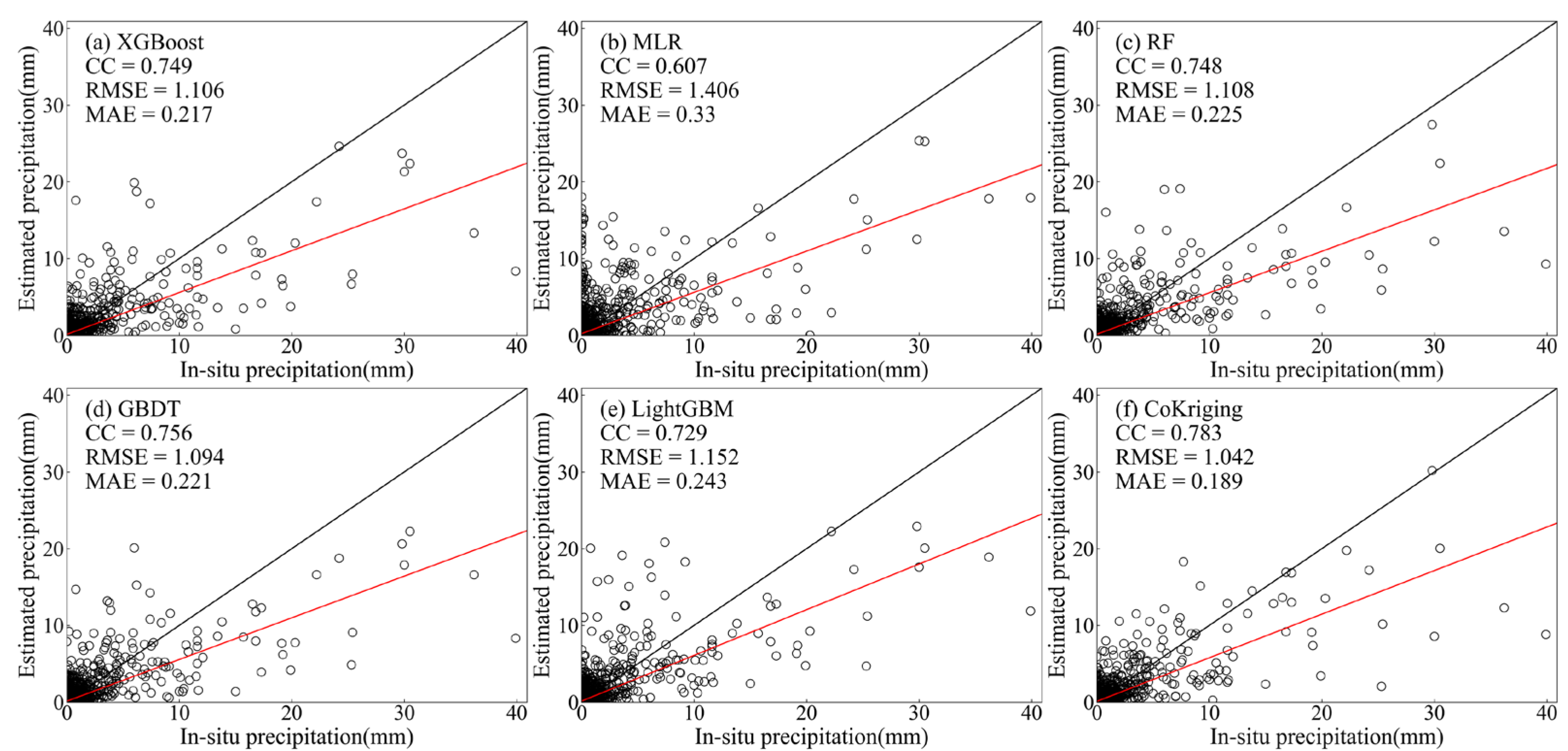
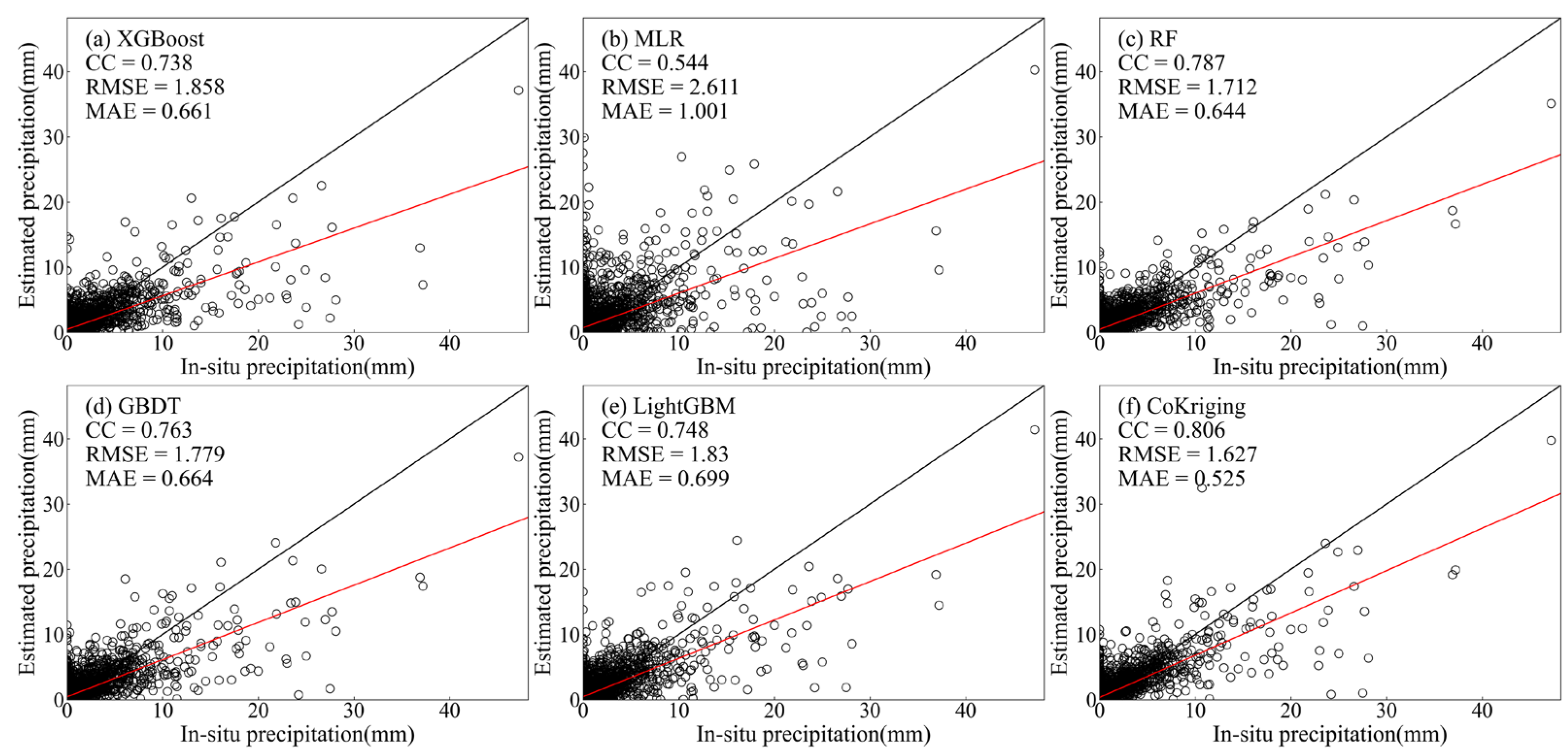
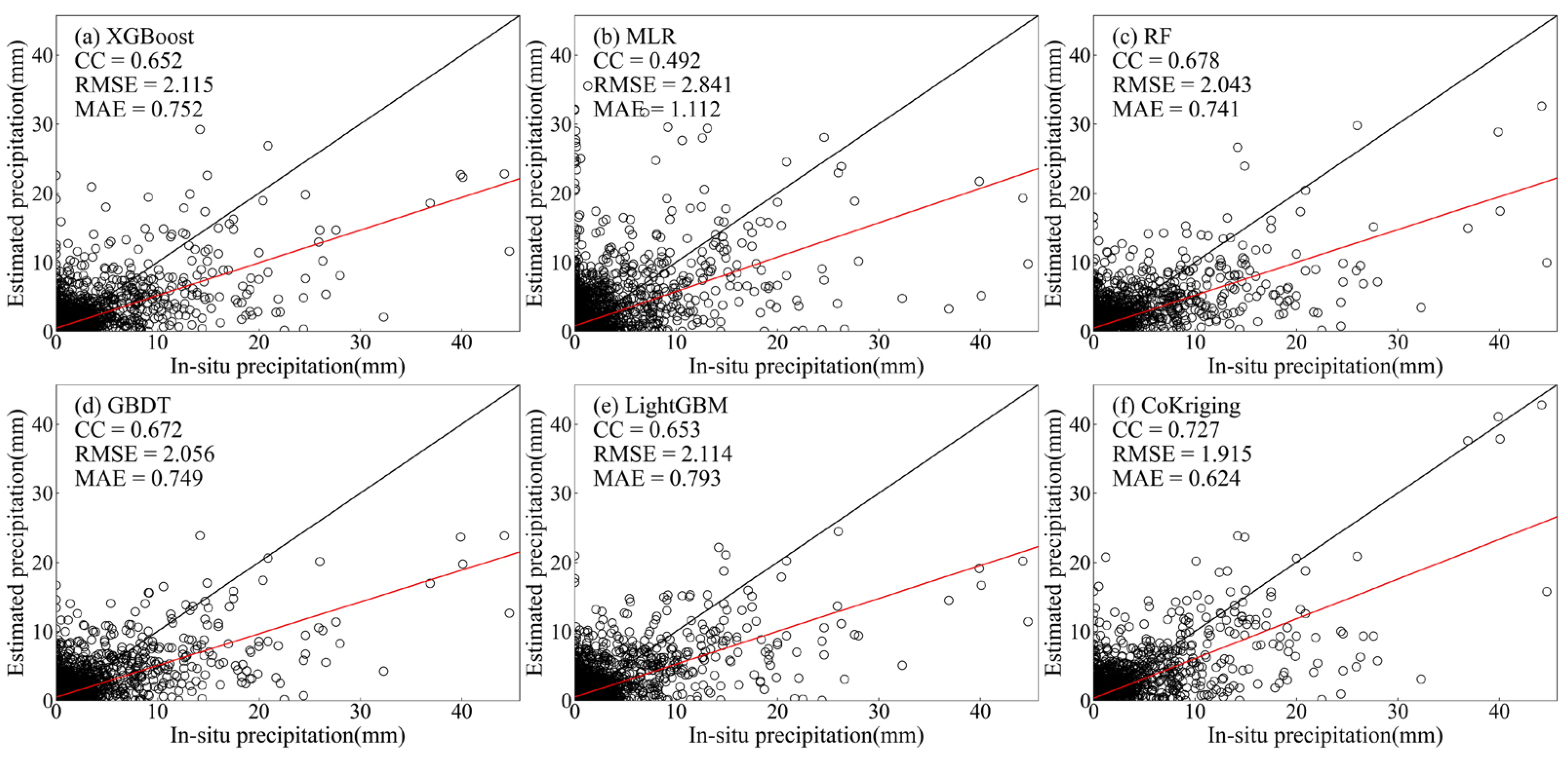
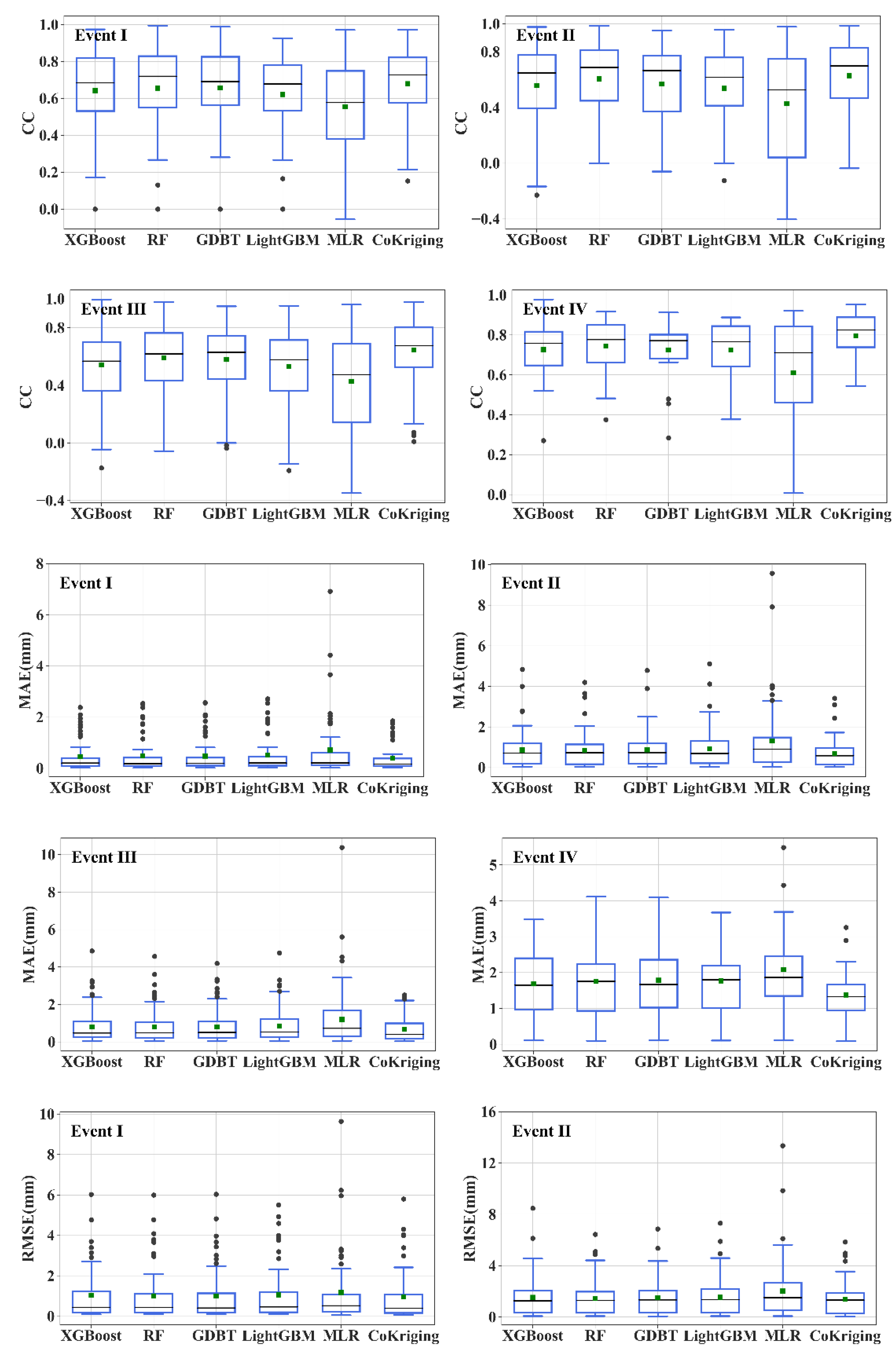
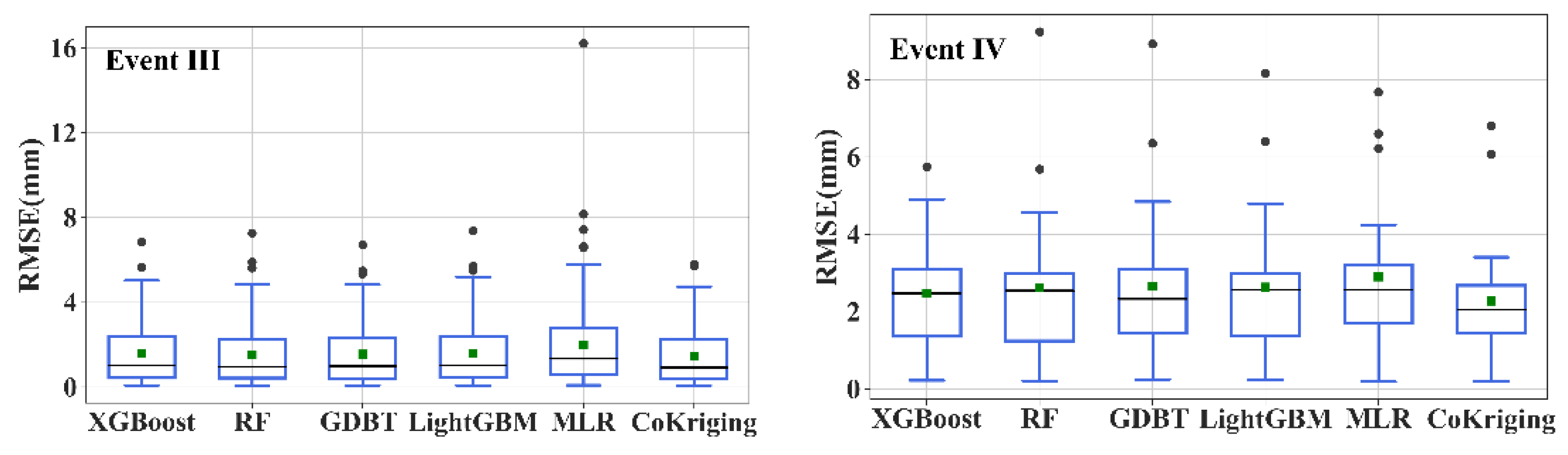
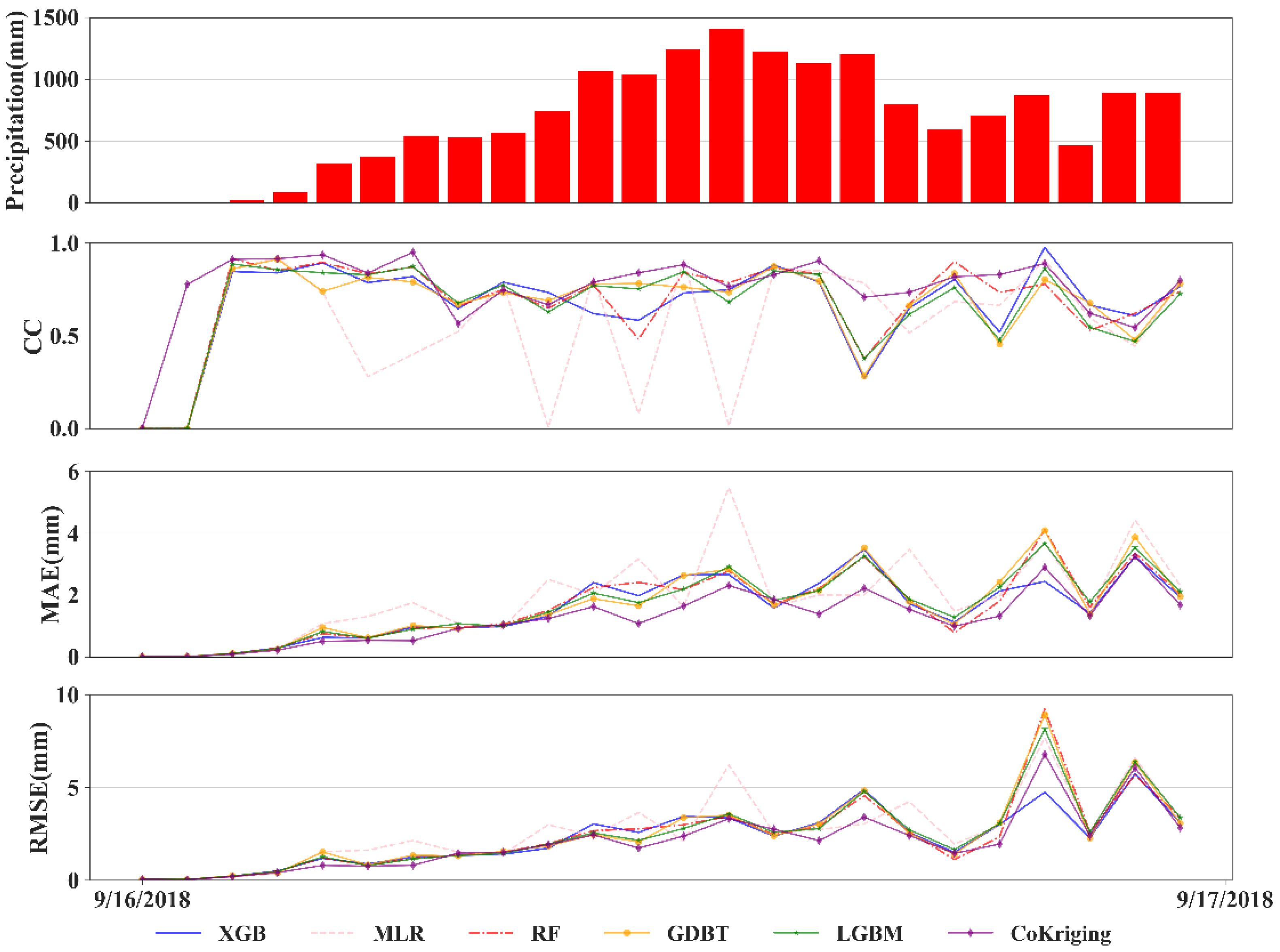
3.1. Evaluation of the Accuracy of Merging Results
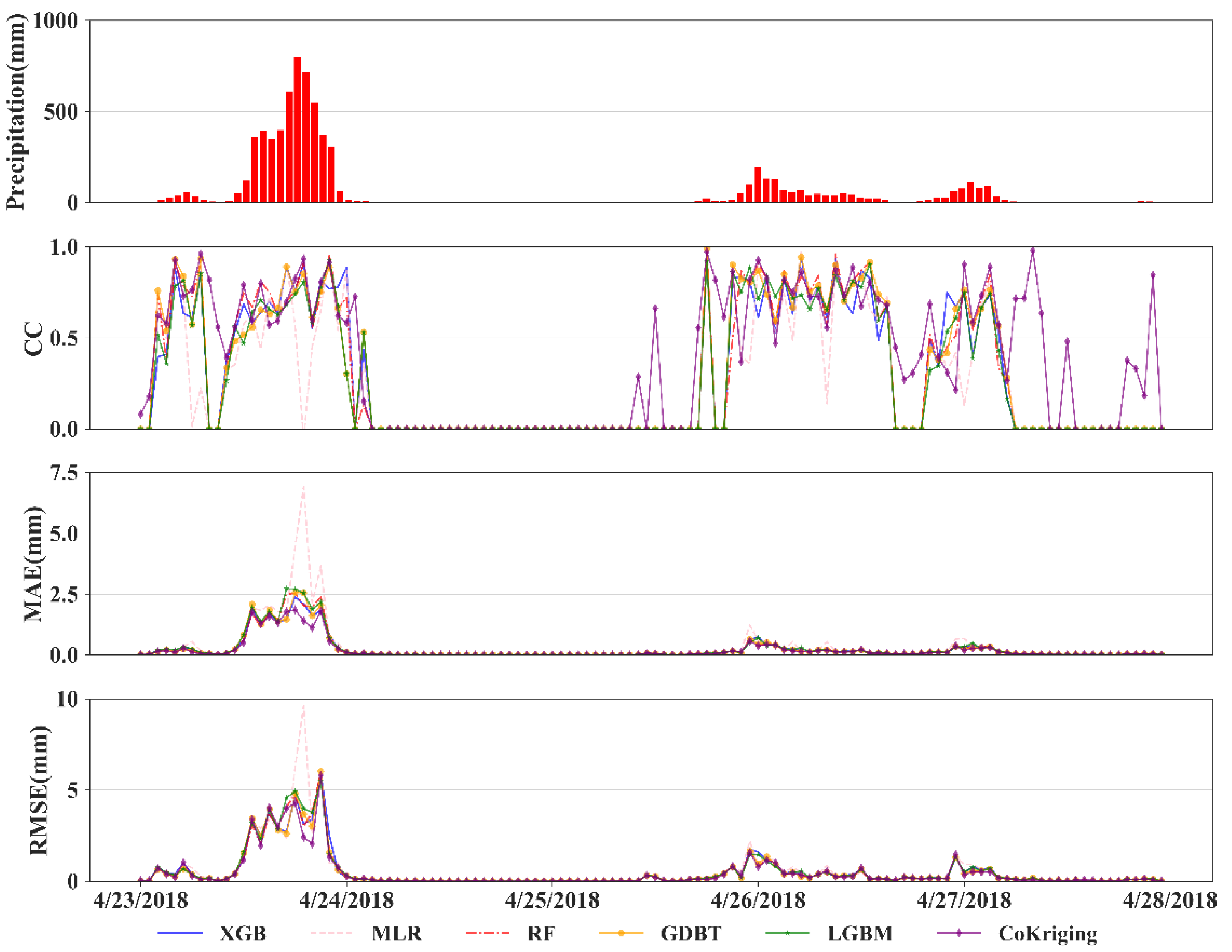
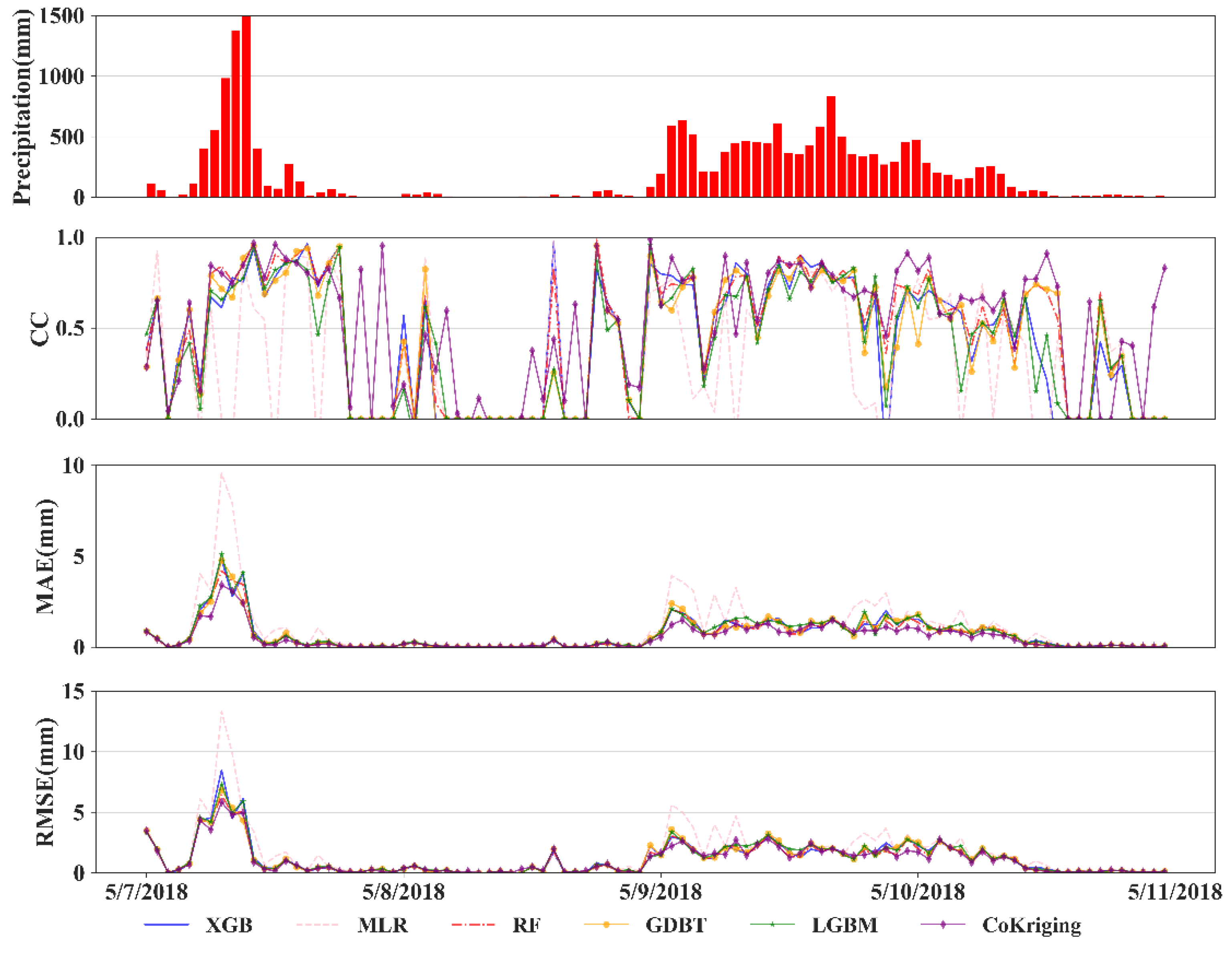
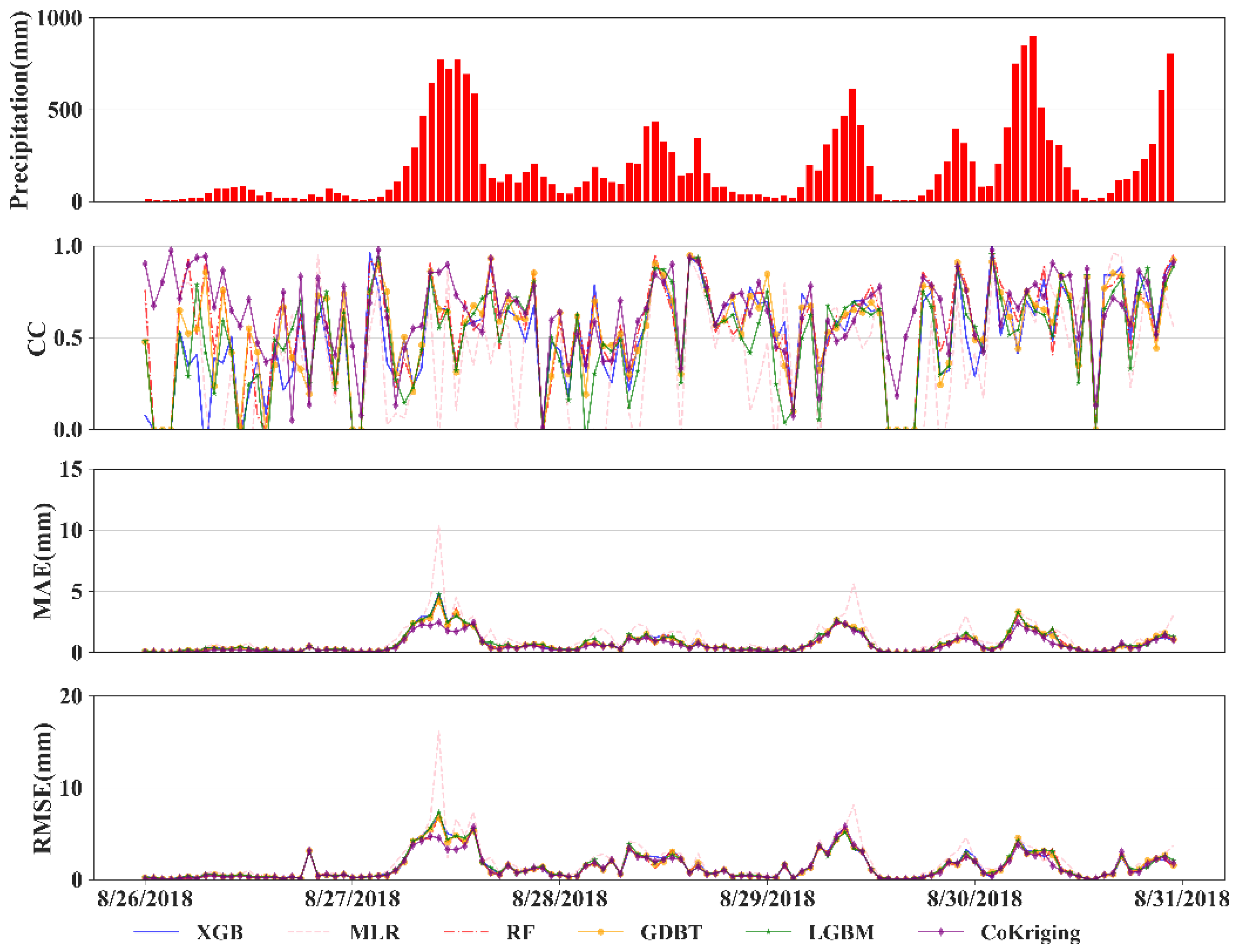
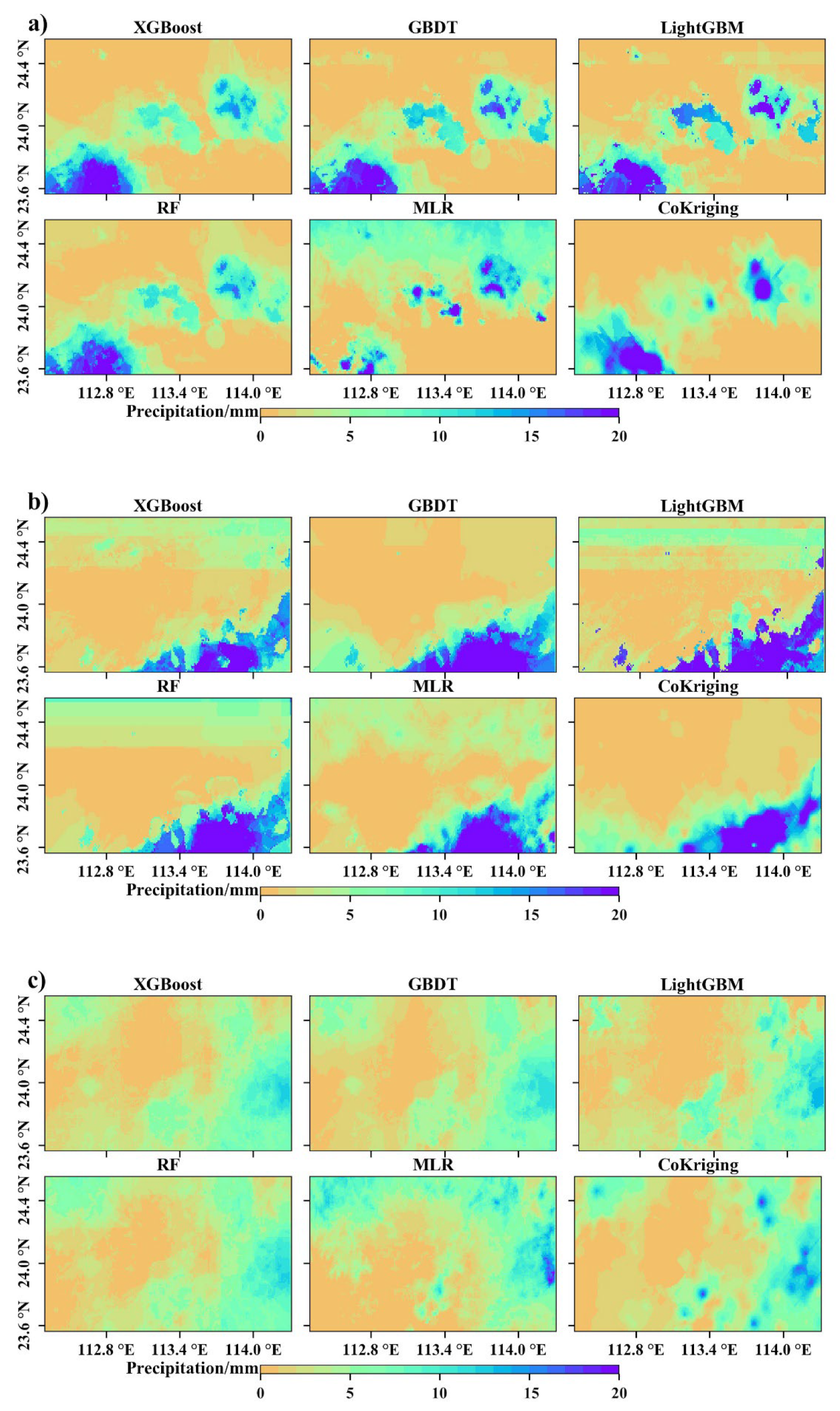
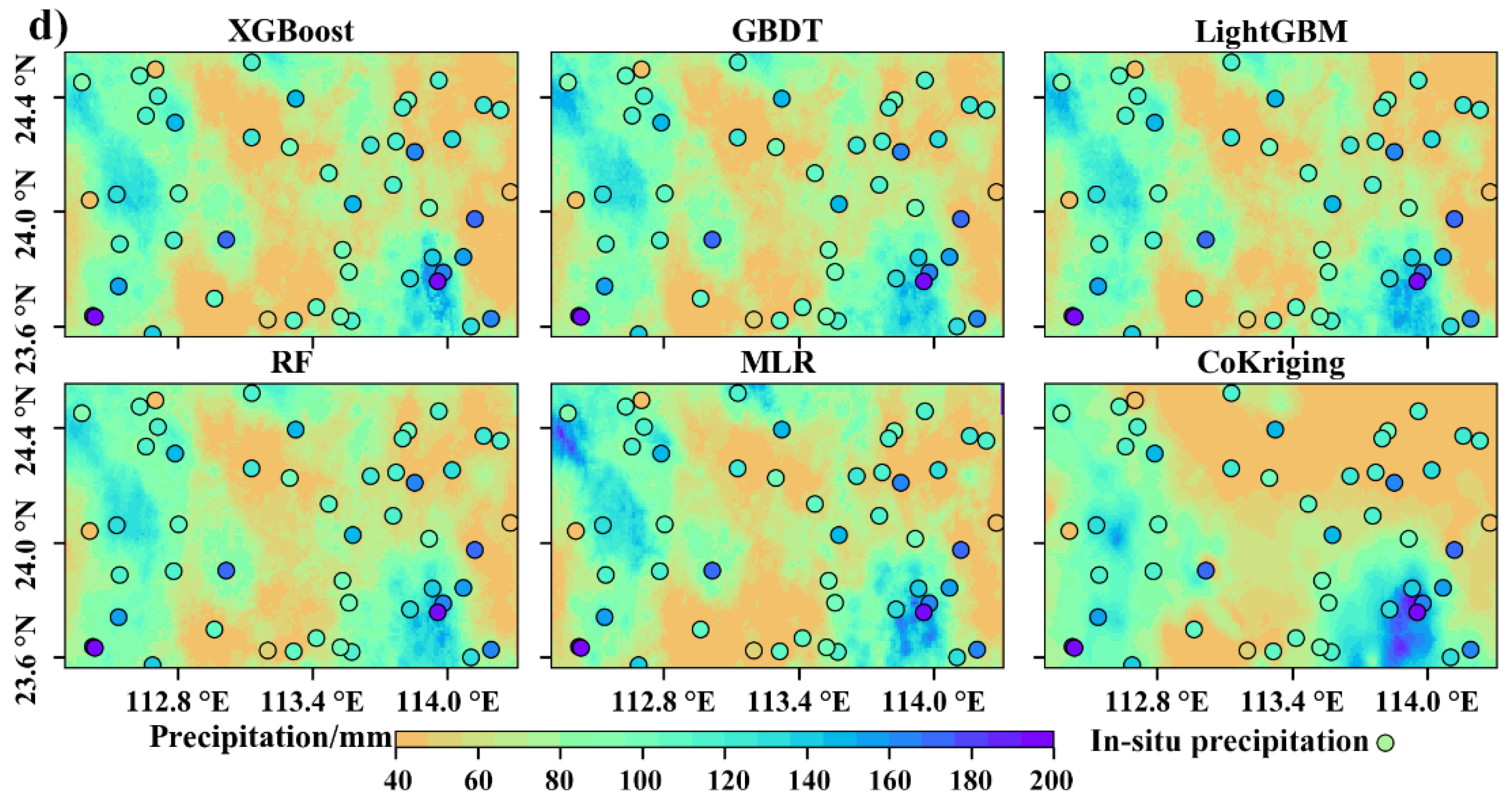
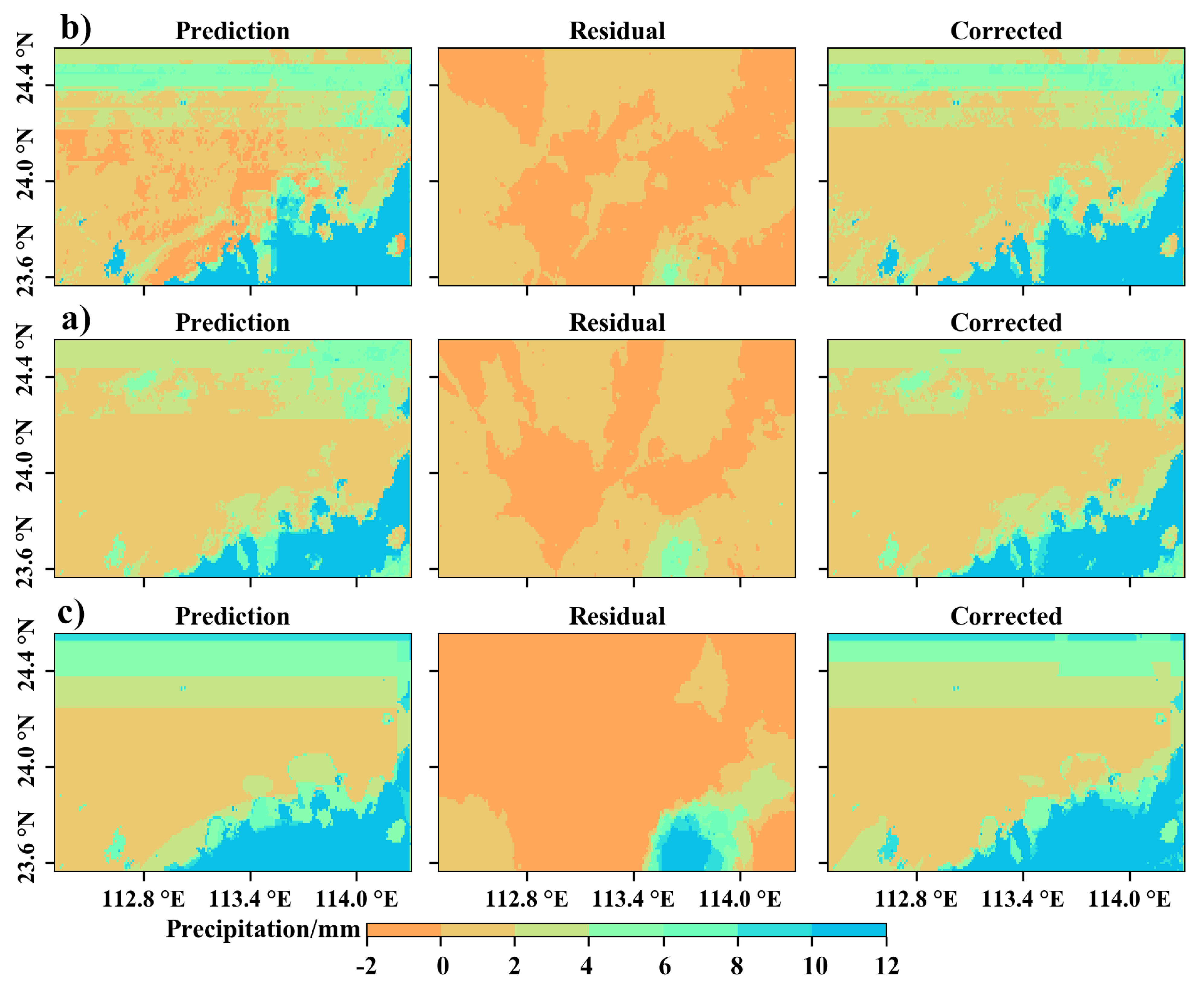
3.2. Merging Result Demonstration
4. Discussion
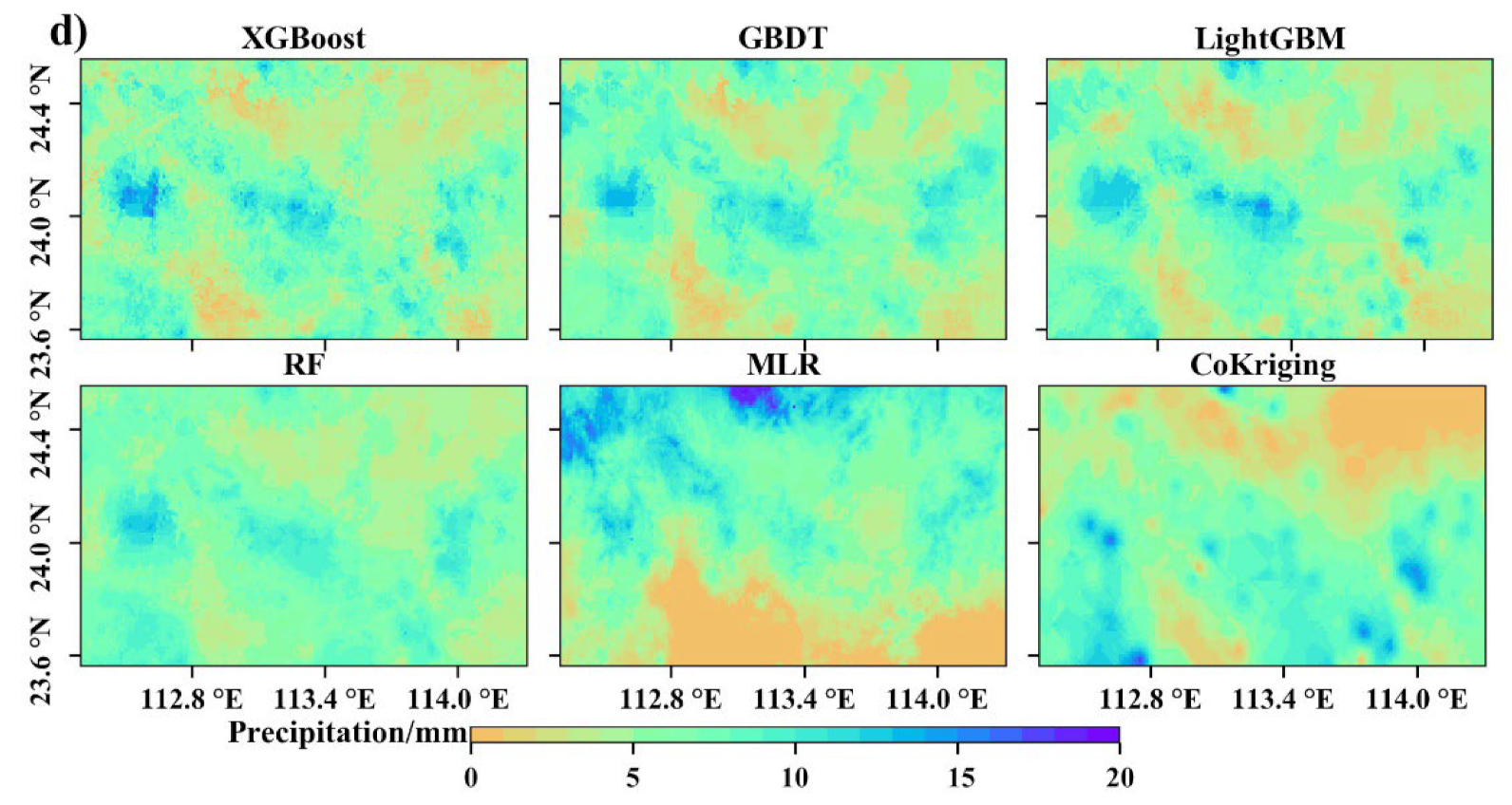
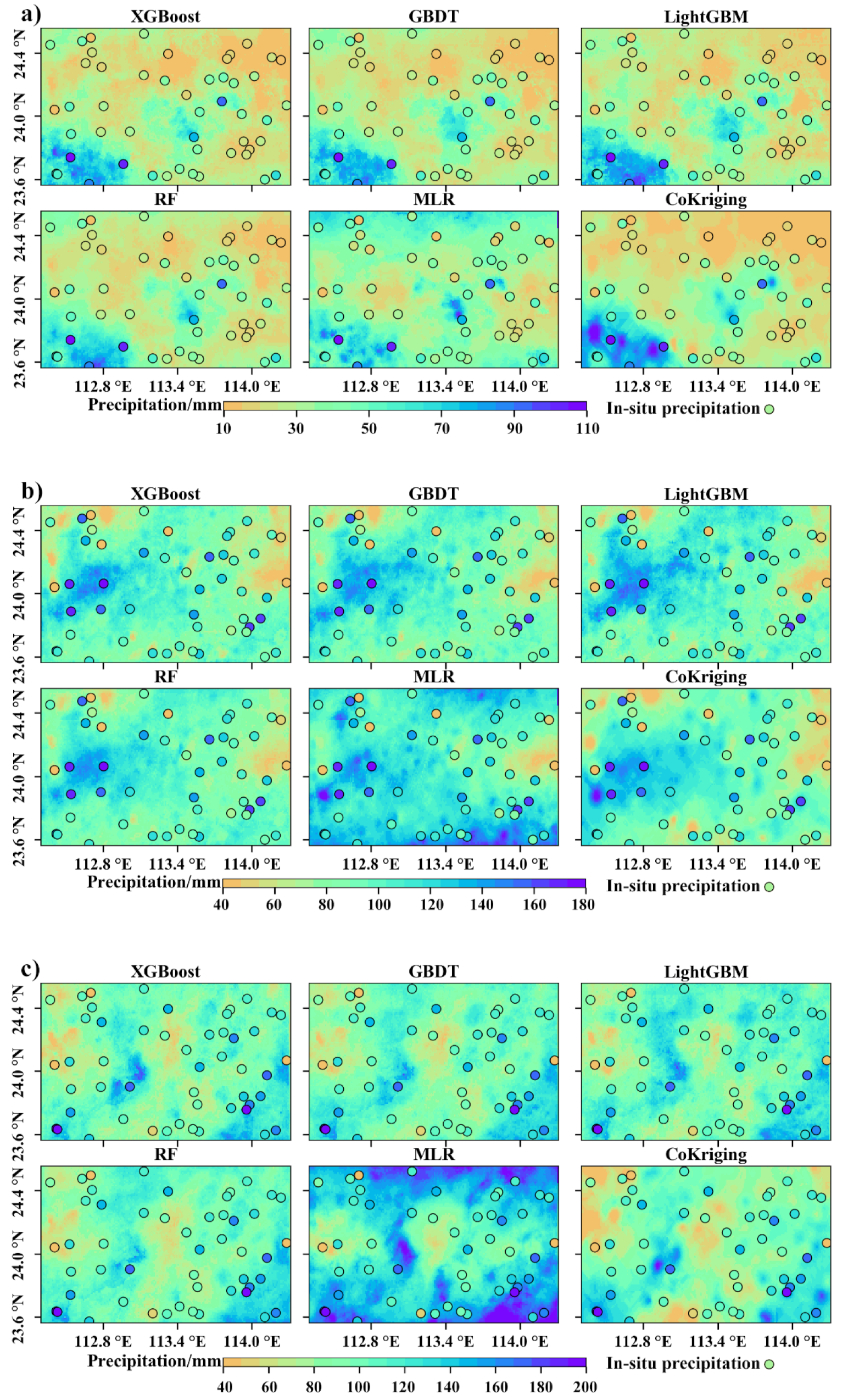
4.1. Spatial Distribution Characteristics of Accumulated Precipitation
4.2. Accuracy Analysis
4.3. Defects of the Merging Results
5. Conclusions
- (1)
- The errors in these precipitation merging results mainly involve underestimations for high-precipitation timepoints and overestimations for low- or no-precipitation timepoints.
- (2)
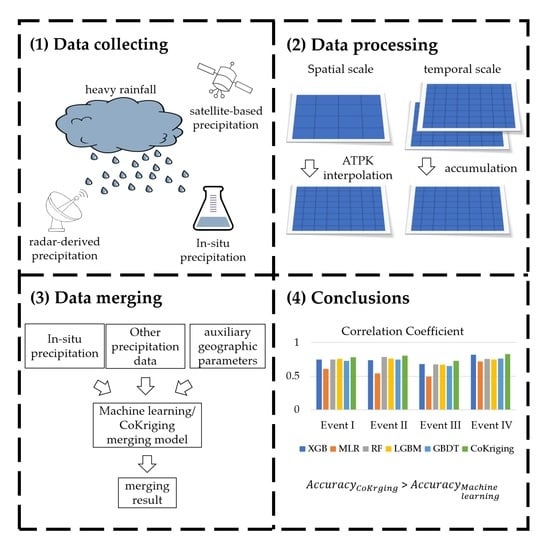
- The spatial distribution of the accumulated precipitation predicted by CoKriging agrees the best with the actual pattern, followed by the results of the tree-based machine learning methods, whereas the distribution of accumulated precipitation predicted by MLR is significantly different from the actual pattern. The merging results of CoKriging have a higher accuracy than the machine learning methods, because precipitation during heavy rainfall events has pronounced spatial autocorrelation, and radar precipitation data as a covariate are highly correlated with the station-observed precipitation.
- (3)
- Different machine learning methods are applicable for different types of heavy rainfall events. The RF-based hourly precipitation merging model is suitable for analyzing monsoon rainstorm events, and the XGBoost-based hourly precipitation merging model is suitable for analyzing typhoon events.
- (4)
- The merging performance of the machine learning methods is relatively poor for the timepoints, with little precipitation during the heavy rainfall event. One reason is that the models have difficulty in extracting features when a small number of meteorological stations observe little precipitation; another one is the models do not capture the temporal variability of precipitation well, while constant rain is always observed the easiest.
- (5)
- The hourly merging results of the tree-based machine learning models contain striped textures at some timepoints, which is caused by an excessively high correlation between the precipitation at these timepoints and latitude and distance from the coastline; the MLR method showed miscalculations for the precipitation values and locations and overestimates the accumulated precipitation for heavy rainfall events II, III, and IV.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sapiano, M.; Arkin, P.A. An intercomparison and validation of high-resolution satellite precipitation estimates with 3-hourly gauge data. J. Hydrometeorol. 2009, 10, 149–166. [Google Scholar] [CrossRef]
- Taylor, C.M.; de Jeu, R.A.; Guichard, F.; Harris, P.P.; Dorigo, W.A. Afternoon rain more likely over drier soils. Nature 2012, 489, 423–426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jieru, Y.; András, B. Short time precipitation estimation using weather radar and surface observations: With rainfall displacement information integrated in a stochastic manner. J. Hydrol. 2019, 574, 672–682. [Google Scholar]
- Tapiador, F.J.; Turk, F.J.; Walt, P.; Arthur, Y.H.; Eduardo, G.; Luiz, A.T.M.; Carlos, F.A.; Paola, S.; Chris, K.; George, J.H.; et al. Global precipitation measurement: Methods, datasets and applications. Atmos. Res. 2012, 104, 70–97. [Google Scholar] [CrossRef]
- Kidd, C.; Becker, A.; Huffman, G.J.; Muller, C.L.; Joe, P.; Skofronick-Jackson, G.; Kirschbaum, D.B. So, how much of the Earth’s surface is covered by rain gauges? Bull. Am. Meteorol. Soc. 2017, 98, 69–78. [Google Scholar] [CrossRef]
- Rana, S.; McGregor, J.; Renwick, J. Precipitation seasonality over the Indian subcontinent: An evaluation of gauge, reanalyses, and satellite retrievals. J. Hydrometeorol. 2015, 16, 631–651. [Google Scholar] [CrossRef]
- Xie, P.; Arkin, P.A. Analyses of global monthly precipitation using gauge observations, satellite estimates, and numerical model predictions. J. Clim. 1996, 9, 840–858. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, K.K.; Adler, R.F.; Tian, Y.; Hong, Y.; Pierce, H.F. Evaluation of a satellite-based global flood monitoring system. Int. J. Remote Sens. 2010, 31, 3763–3782. [Google Scholar] [CrossRef]
- Arkin, P.A.; Meisner, B.N. The relationship between large-scale convective rainfall and cold cloud over the western hemisphere during 1982-84. Mon. Weather. Rev. 1987, 115, 51–74. [Google Scholar] [CrossRef] [Green Version]
- Berg, W.; Chase, R. Determination of mean rainfall from the Special Sensor Microwave/Imager (SSM/I) using a mixed lognormal distribution. J. Atmos. Ocean. Technol. 1992, 9, 129–141. [Google Scholar] [CrossRef] [Green Version]
- Xie, P.; Arkin, P.A. Global precipitation: A 17-year monthly analysis based on gauge observations, satellite estimates, and numerical model outputs. Bull. Am. Meteorol. Soc. 1997, 78, 2539–2558. [Google Scholar] [CrossRef]
- Huffman, G.J.; Adler, R.F.; Arkin, P.; Chang, A.; Ferraro, R.; Gruber, A.; Janowiak, J.; McNab, A.; Rudolf, B.; Schneider, U. The global precipitation climatology project (GPCP) combined precipitation dataset. Bull. Am. Meteorol. Soc. 1997, 78, 5–20. [Google Scholar] [CrossRef]
- Ziqiang, M.; Jintao, X.; Kang, H.; Xiuzhen, H.; Qingwen, J.; TseChun, W.; Wentao, X.; Yang, H. An updated moving window algorithm for hourly-scale satellite precipitation downscaling: A case study in the Southeast Coast of China. J. Hydrol. 2020, 581, 124378. [Google Scholar]
- Gao, Y.; Xu, H.; Liu, G. Evaluation of the GSMaP Estimates on Monitoring Extreme Precipitation Events. Remote sensing Technology and Application. Remote Sens. Technol. Appl. 2019, 34, 1121–1132. [Google Scholar]
- Michaelides, S.; Levizzani, V.; Anagnostou, E.; Bauer, P.; Kasparis, T.; Lane, J.E. Precipitation: Measurement, remote sensing, climatology and modeling. Atmos. Res. 2009, 94, 512–533. [Google Scholar] [CrossRef]
- Zhang, J.; Howard, K.; Langston, C.; Kaney, B.; Qi, Y.; Tang, L.; Grams, H.; Wang, Y.; Cocks, S.; Martinaitis, S. Multi-Radar Multi-Sensor (MRMS) quantitative precipitation estimation: Initial operating capabilities. Bull. Am. Meteorol. Soc. 2016, 97, 621–638. [Google Scholar] [CrossRef]
- Shen, Y.; Zhao, P.; Pan, Y.; Yu, J. A high spatiotemporal gauge-satellite merged precipitation analysis over China. J. Geophys. Res. Atmos. 2014, 119, 3063–3075. [Google Scholar] [CrossRef]
- Alharbi, R.; Hsu, K.; Sorooshian, S. Bias adjustment of satellite-based precipitation estimation using artificial neural networks-cloud classification system over Saudi Arabia. Arab. J. Geosci. 2018, 11, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Wang, Z.; Xia, T. Mapping Areal Precipitation with Fusion Data by ANN Machine Learning in Sparse Gauged Region. Applied Sciences. 2019, 9, 2294. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Pan, S.; Xu, B.; Y, J. Parameter Improvements of Hourly Automatic Weather Stations Precipitation Analysis by Optimal Interpolation over China. J. Chengdu Univ. Technol. 2012, 27, 219–224. [Google Scholar]
- Kunwei, L.; Xiong, Y.; Xin, Z.; Fen, T. Multi-source Precipitation Data Fusion Method Based on Filtersim. J. Syst. Simul. 2019, 31, 1232. [Google Scholar]
- Wu, H.; Yang, Q.; Liu, J.; Wang, G. A spatiotemporal deep fusion model for merging satellite and gauge precipitation in China. J. Hydrol. 2020, 584, 124664. [Google Scholar] [CrossRef]
- Chen, S.; Xiong, L.; Ma, Q.; Kim, J.; Chen, J.; Xu, C. Improving daily spatial precipitation estimates by merging gauge observation with multiple satellite-based precipitation products based on the geographically weighted ridge regression method. J. Hydrol. 2020, 589, 125156. [Google Scholar] [CrossRef]
- Delrieu, G.; Wijbrans, A.; Boudevillain, B.; Faure, D.; Bonnifait, L.; Kirstetter, P. Geostatistical radar–raingauge merging: A novel method for the quantification of rain estimation accuracy. Adv. Water Resour. 2014, 71, 110–124. [Google Scholar] [CrossRef]
- Sideris, I.V.; Gabella, M.; Sassi, M.; Germann, U. Real-Time Spatiotemporal Merging of Radar and Raingauge Precipitation Measurements in Switzerland. In Proceedings of the 9th International Workshop on Precipitation in Urban Areas, St. Moritz, Switzerland, 6–9 December 2012. [Google Scholar]
- Azimi-Zonooz, A.; Krajewski, W.F.; Bowles, D.S.; Seo, D.J. Spatial rainfall estimation by linear and non-linear co-kriging of radar-rainfall and raingage data. Stoch. Hydrol. Hydraul. 1989, 3, 51–67. [Google Scholar] [CrossRef]
- Zhang, G.; Tian, G.; Cai, D.; Bai, R.; Tong, J. Merging radar and rain gauge data by using spatial–temporal local weighted linear regression kriging for quantitative precipitation estimation. J. Hydrol. 2021, 601, 126612. [Google Scholar] [CrossRef]
- Chen, H.; Chandrasekar, V.; Cifelli, R.; Xie, P. A Machine Learning System for Precipitation Estimation Using Satellite and Ground Radar Network Observations. IEEE Trans. Geosci. Remote 2019, 58, 982–994. [Google Scholar] [CrossRef]
- Sønderby, C.K.; Espeholt, L.; Heek, J.; Dehghani, M.; Oliver, A.; Salimans, T.; Agrawal, S.; Hickey, J.; Kalchbrenner, N. Metnet: A neural weather model for precipitation forecasting. arXiv 2020, arXiv:2003.12140. [Google Scholar]
- Hazra, A.; Maggioni, V.; Houser, P.; Antil, H.; Noonan, M. A Monte Carlo-based multi-objective optimization approach to merge different precipitation estimates for land surface modeling. J. Hydrol. 2019, 570, 454–462. [Google Scholar] [CrossRef]
- Pang, Y.; Shen, Y.; Yu, J.; Xiong, A. An experiment of high-resolution gauge-radar-satellite combined precipitation retrieval based on the Bayesian merging method. Acta Meteorol. Sin. 2015, 73, 177–186. [Google Scholar]
- Wehbe, Y.; Temimi, M.; Adler, R.F. Enhancing precipitation estimates through the fusion of weather radar, satellite retrievals, and surface parameters. Remote Sens.-Basel 2020, 12, 1342. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Yu, R.; Sun, W. Duration and seasonality of the hourly extreme rainfall in the central-eastern part of China. Acta Meteorol. Sin. 2013, 71, 652–659. [Google Scholar]
- Trenberth, K.E.; Dai, A.; Rasmussen, R.M.; Parsons, D.B. The changing character of precipitation. Bull. Am. Meteorol. Soc. 2003, 84, 1205–1218. [Google Scholar] [CrossRef]
- Li, D.; Chen, W.; Ye, A. Climatic characteristics and forecast focus of heavy rain in Qingyuan. Guangdong Meteorol. 1999, 2, 8–10. [Google Scholar]
- Roe, G.H. Orographic precipitation. Annu. Rev. Earth Planet. Sci. 2005, 33, 645–671. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Xie, P.; Yoo, S. NASA global precipitation measurement (GPM) integrated multi-satellite retrievals for GPM (IMERG). Algorithm Theor. Basis Doc. ATBD Version 2015, 4, 26. [Google Scholar]
- Shige, S.; Yamamoto, T.; Tsukiyama, T.; Kida, S.; Ashiwake, H.; Kubota, T.; Seto, S.; Aonashi, K.; Okamoto, K. The GSMaP precipitation retrieval algorithm for microwave sounders—Part I: Over-ocean algorithm. IEEE Trans. Geosci. Remote 2009, 47, 3084–3097. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The global precipitation measurement mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Ushio, T.; Sasashige, K.; Kubota, T.; Shige, S.; Okamoto, K.; Aonashi, K.; Inoue, T.; Takahashi, N.; Iguchi, T.; Kachi, M. A Kalman filter approach to the Global Satellite Mapping of Precipitation (GSMaP) from combined passive microwave and infrared radiometric data. J. Meteorol. Soc. Jpn. Ser. II. 2009, 87, 137–151. [Google Scholar] [CrossRef] [Green Version]
- Kyriakidis, P.C. A geostatistical framework for area-to-point spatial interpolation. Geogr. Anal. 2004, 36, 259–289. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T. Lightgbm: A highly efficient gradient boosting decision tree. Adv. Neural Inf. Processing Syst. 2017, 30, 3146–3154. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R. Spatial Variation Theory and Applications; Science Press: Beijing, China, 2005. [Google Scholar]
- Huang, X.; He, L.; Zhao, H.; Huang, Y.; Wu, Y. Prediction model based on the Laplacian eigenmap method combined with a random forest algorithm for rainstorm satellite images during the first annual rainy season in South China. Nat. Hazards 2021, 107, 331–353. [Google Scholar] [CrossRef]
- Chao, L.; Zhang, K.; Li, Z.; Zhu, Y.; Wang, J.; Yu, Z. Geographically weighted regression based methods for merging satellite and gauge precipitation. J. Hydrol. 2018, 558, 275–289. [Google Scholar] [CrossRef]
- Li, X.; Wei, Z.; Shaoping, H.; Weihua, D.; Xueying, Z. Analysis of fusion test results on hourly precipitation from meteorological and hydrological stations and radar. Torrential Rain Disasters 2020, 39, 276–284. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Xu, J.; Dai, X.; Ruan, H.; Liu, X.; Jing, W. Multi-Source Precipitation Data Merging for Heavy Rainfall Events Based on Cokriging and Machine Learning Methods. Remote Sens. 2022, 14, 1750. https://doi.org/10.3390/rs14071750
Zhang J, Xu J, Dai X, Ruan H, Liu X, Jing W. Multi-Source Precipitation Data Merging for Heavy Rainfall Events Based on Cokriging and Machine Learning Methods. Remote Sensing. 2022; 14(7):1750. https://doi.org/10.3390/rs14071750
Chicago/Turabian StyleZhang, Junmin, Jianhui Xu, Xiaoai Dai, Huihua Ruan, Xulong Liu, and Wenlong Jing. 2022. "Multi-Source Precipitation Data Merging for Heavy Rainfall Events Based on Cokriging and Machine Learning Methods" Remote Sensing 14, no. 7: 1750. https://doi.org/10.3390/rs14071750