
A Novel Method for Mapping Lake Bottom Topography Using the GSW Dataset and Measured Water Level


Abstract
:1. Introduction
- To develop a novel method for mapping the bottom topography of lakes with periodically significant spatiotemporal variations and sufficient measured water level data.
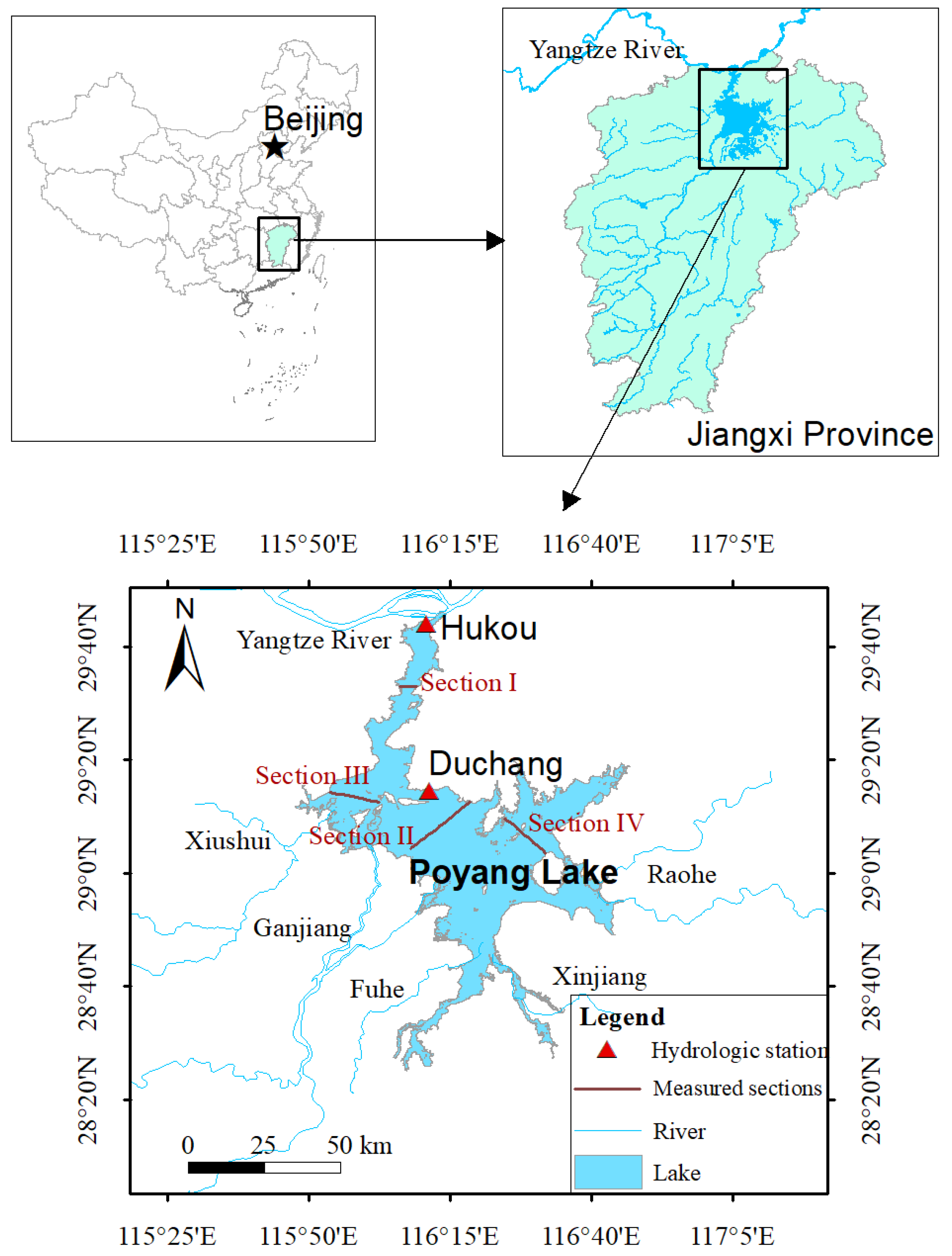
- To conduct a case study on Poyang Lake, the largest freshwater lake in China with great seasonal variations [36], in order to demonstrate the performance of the proposed method. The derived bottom topographic map of Poyang Lake can be used as baseline data for further studies on area variation monitoring and water volume estimation.
- To have a preliminary discussion about the advantages, the limitations, and the application prospect for the proposed method.
2. Materials and Methods
2.1. Study Area
2.2. Materials
2.2.1. Global Surface Water Dataset
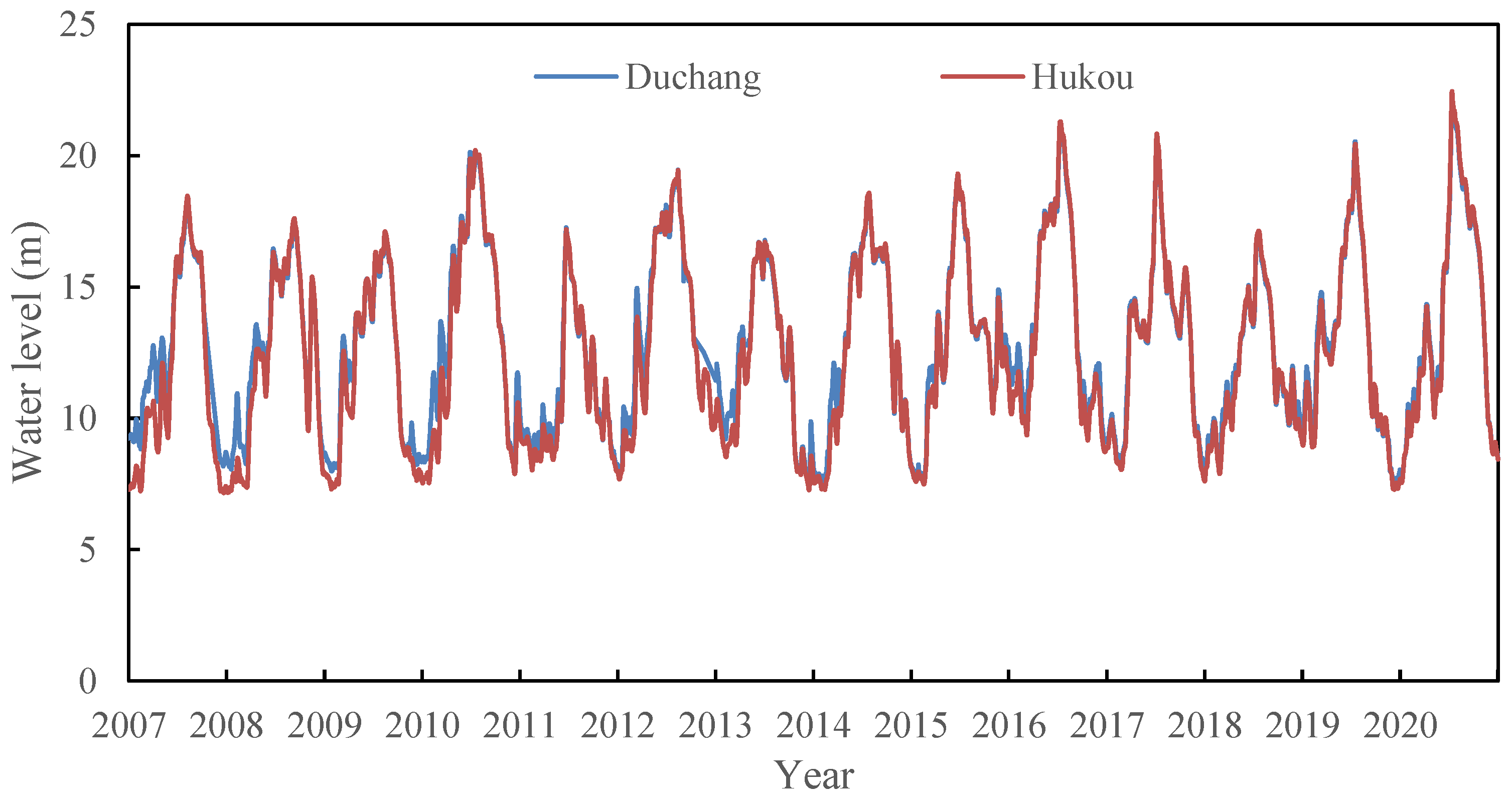
2.2.2. Lake Water Level Data
2.2.3. Measured Lake Topographic Data
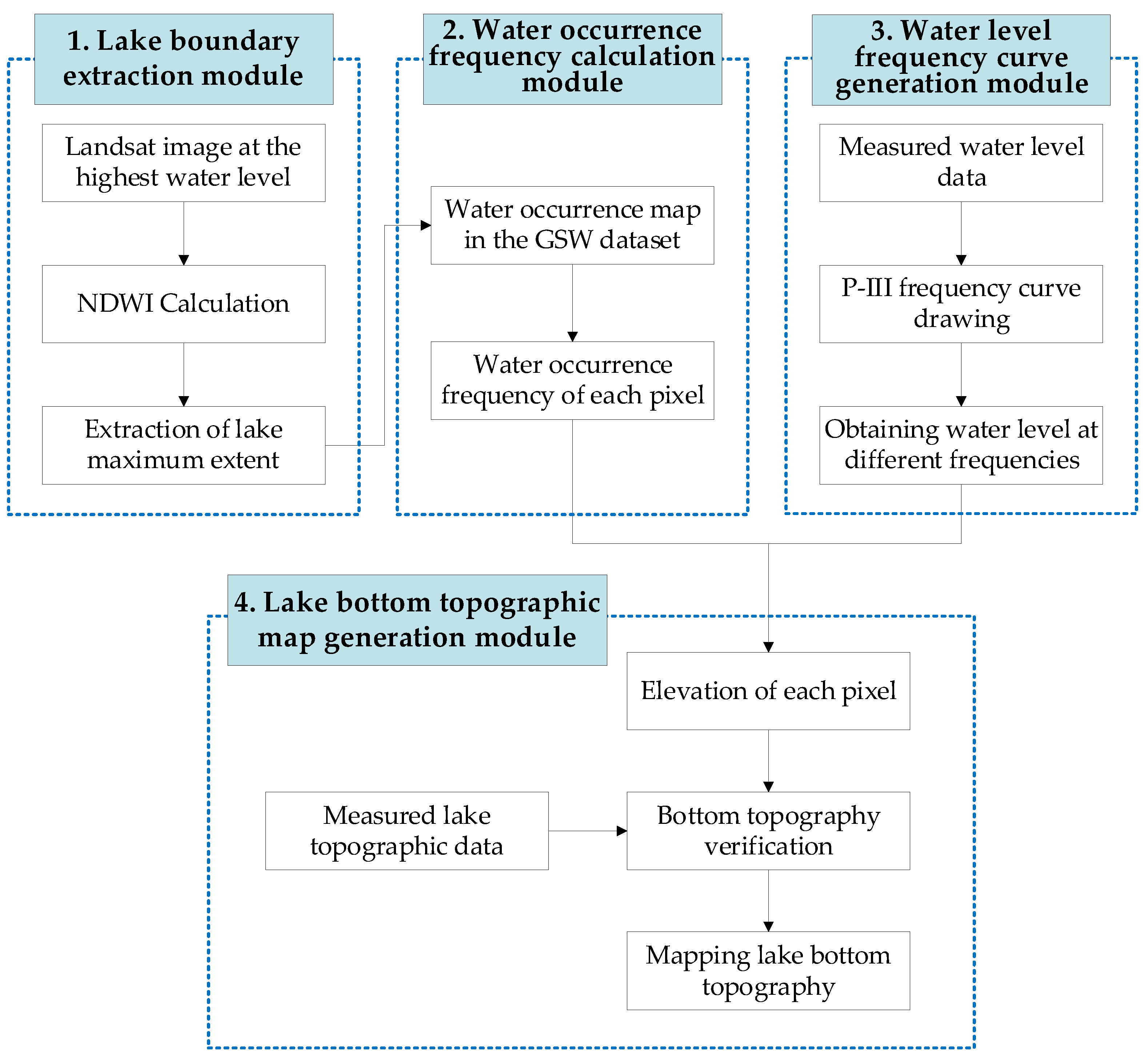
2.3. Methods
- Lake boundary extraction module
- 2.
- Water occurrence frequency calculation module
- 3.
- Water level frequency curve generation module
- (1)
- Empirical frequency calculation
- (2)
- P-III distribution function
- (3)
- Parameter estimation
- (4)
- Curve fitting
- 4.
- Lake bottom topographic map generating module
3. Results
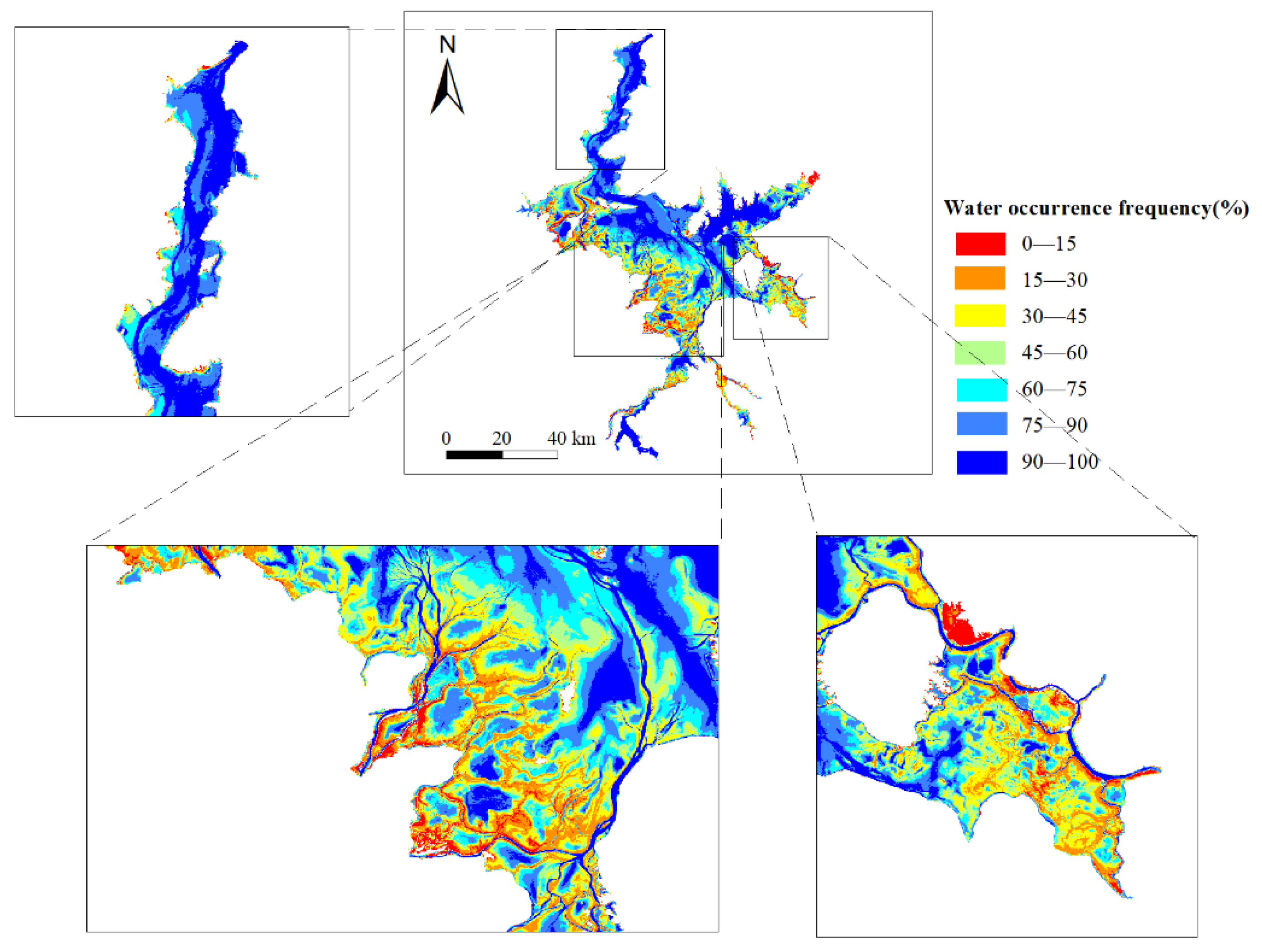
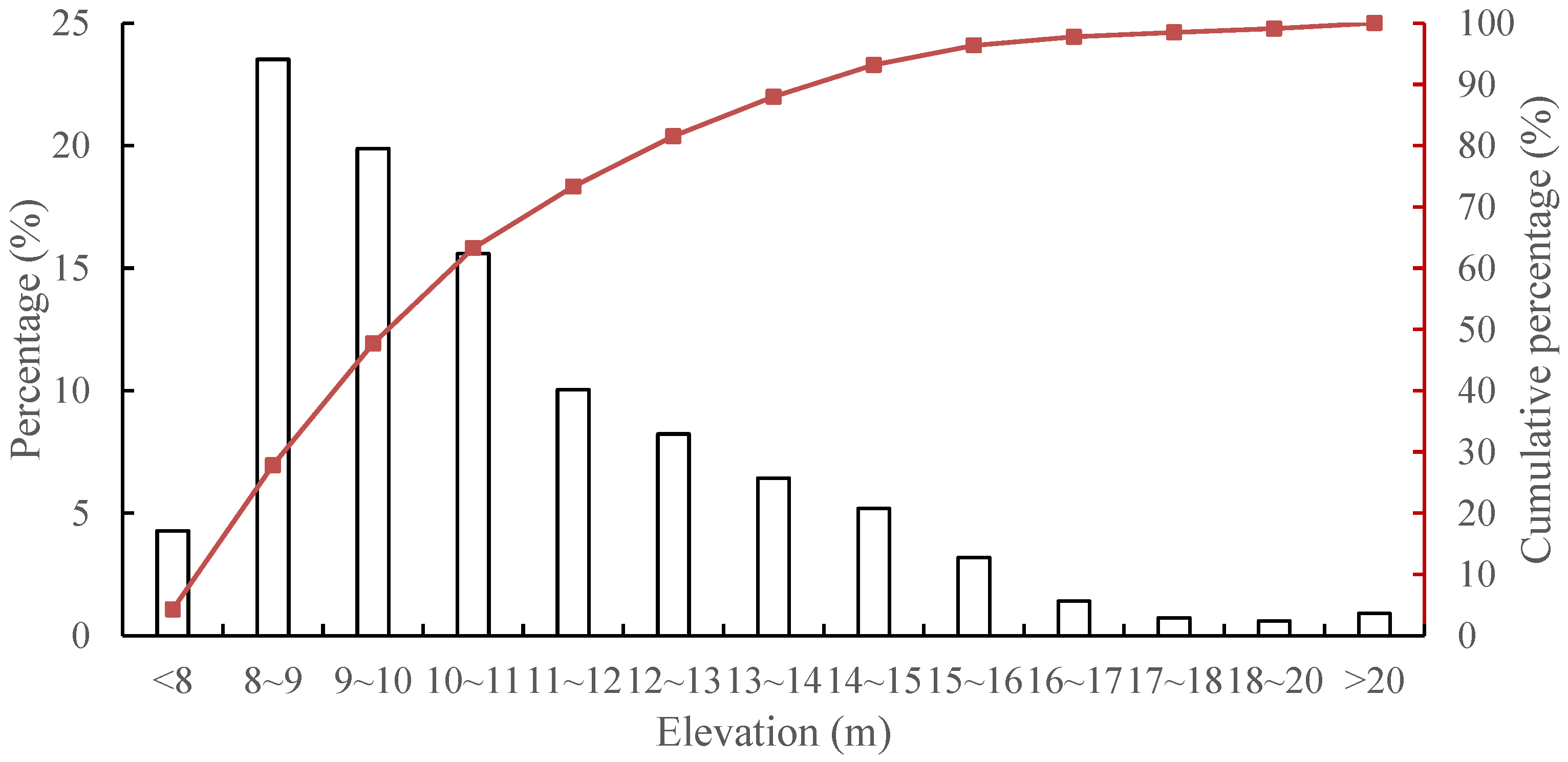
3.1. Water Occurrence Frequency of Poyang Lake
3.2. Water Level Frequency Curve of Poyang Lake
3.3. Bottom Topographic Map of Poyang Lake
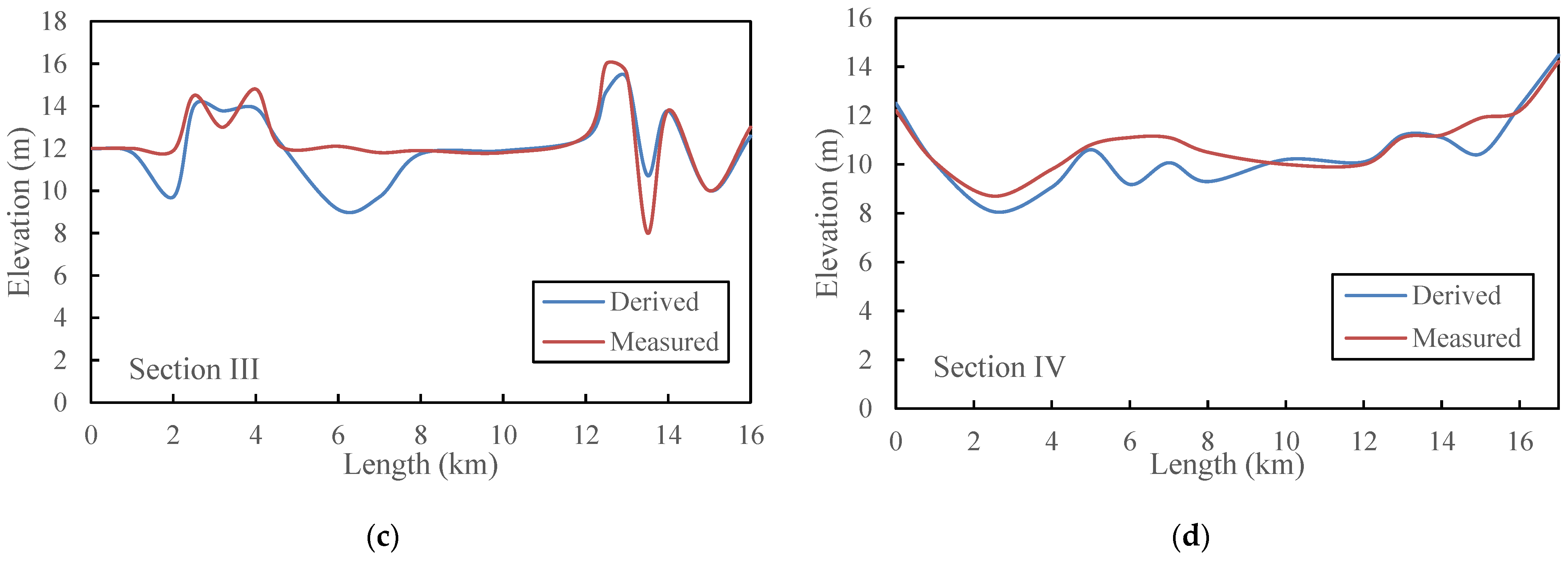
3.4. Verification of the Proposed Method
4. Discussion
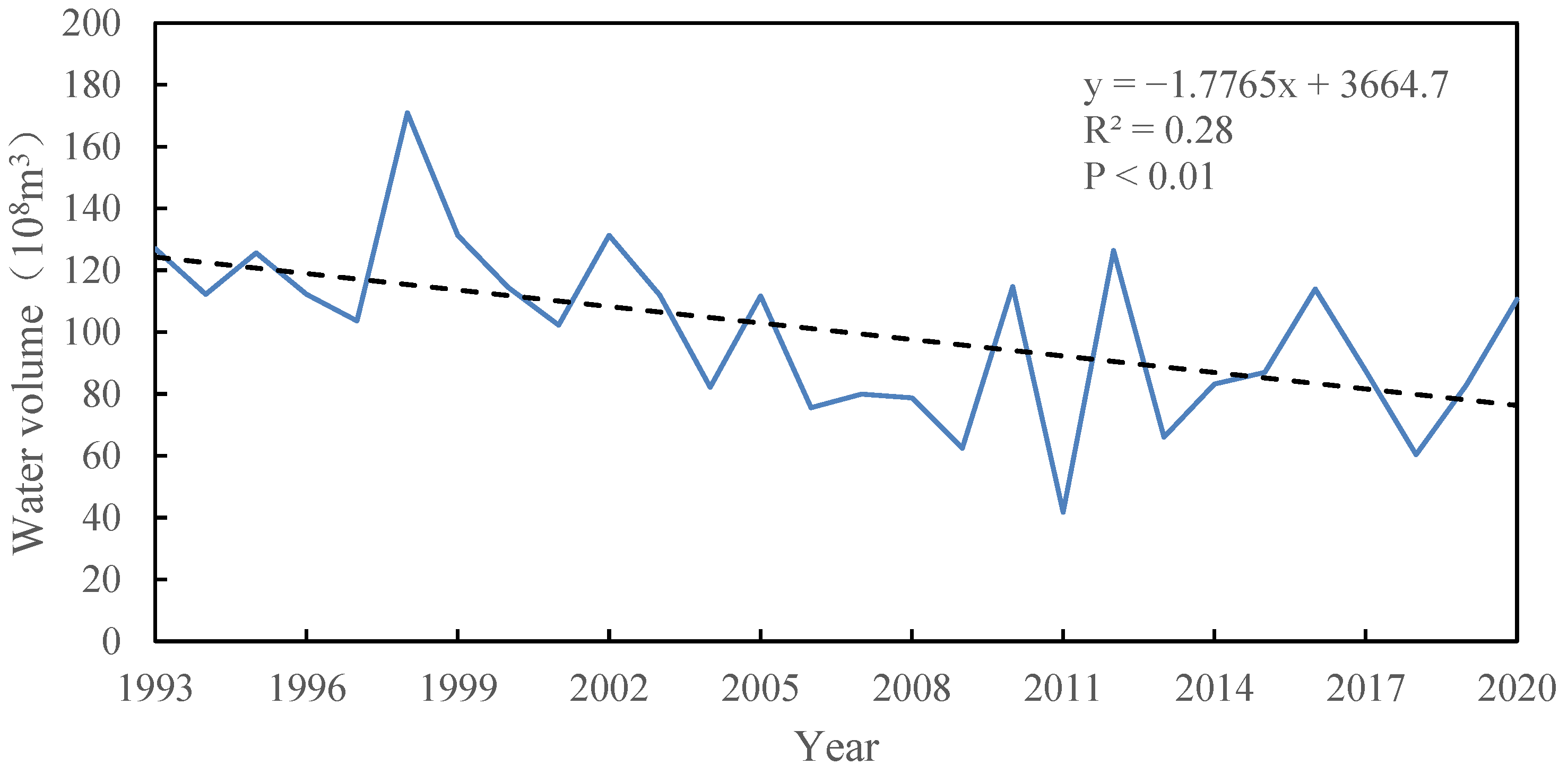
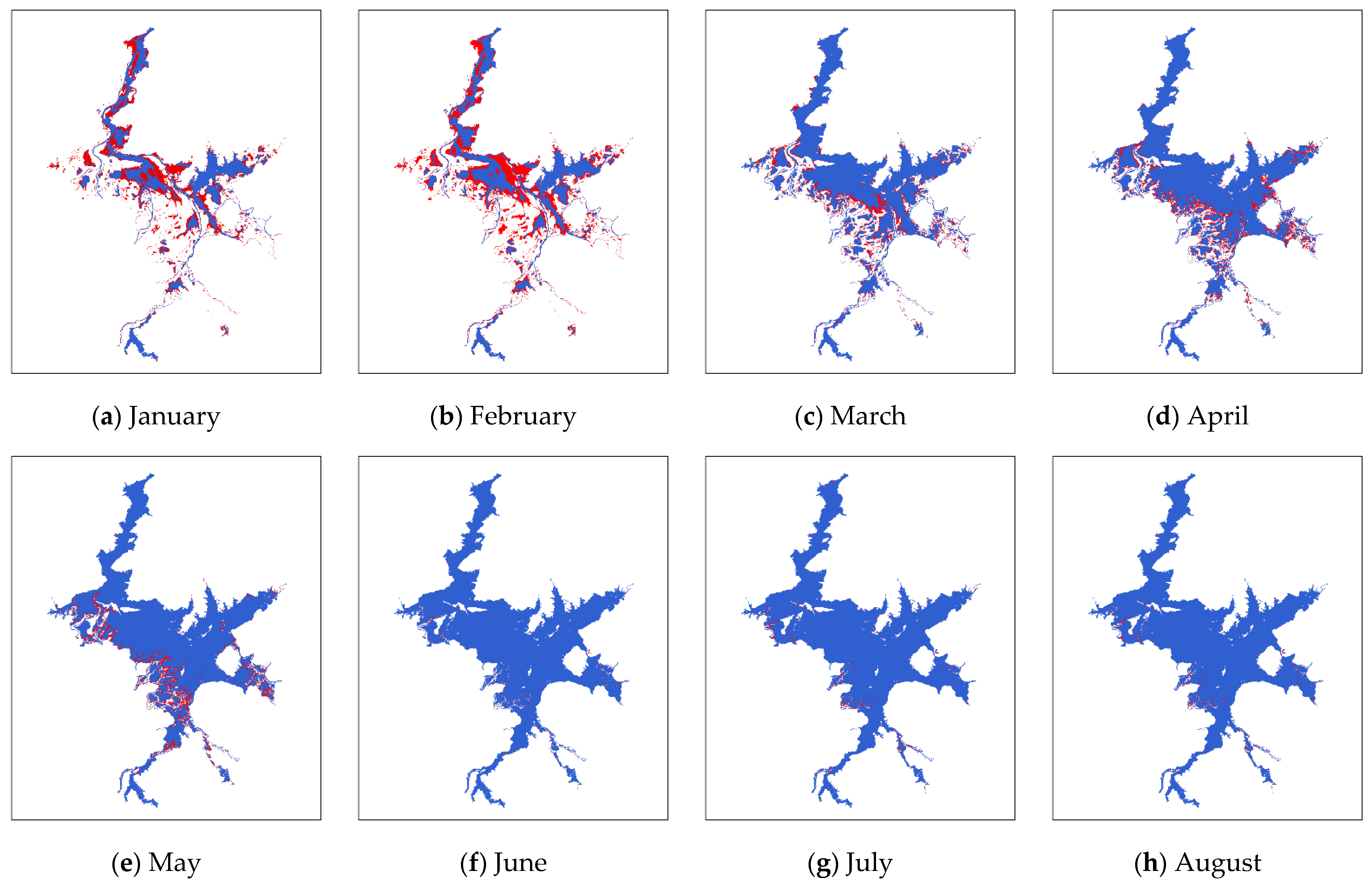
4.1. The Spatiotemporal Variations of Poyang Lake Based on the Derived Bottom Topography
4.2. Advantages of the Proposed Method
4.3. Limitations of the Proposed Method
4.4. Application Prospect
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Verpoorter, C.; Kutser, T.; Seekell, D.A.; Tranvik, L.J. A global inventory of lakes based on high-resolution satellite imagery. Geophys. Res. Lett. 2014, 41, 6396–6402. [Google Scholar] [CrossRef]
- Lee, H.; Durand, M.; Jung, H.C.; Alsdorf, D.; Shum, C.K.; Sheng, Y. Characterization of surface water storage changes in Arctic lakes using simulated SWOT measurements. Int. J. Remote Sens. 2010, 31, 3931–3953. [Google Scholar] [CrossRef]
- Fang, Y.; Li, H.; Wan, W.; Zhu, S.; Wang, Z.; Hong, Y.; Wang, H. Assessment of Water Storage Change in China’s Lakes and Reservoirs over the Last Three Decades. Remote Sens. 2019, 11, 1467. [Google Scholar] [CrossRef] [Green Version]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Allen, S.E. On subinertial flow in submarine canyons: Effect of geometry. J. Geophys. Res. Ocean. 2000, 105, 1285. [Google Scholar] [CrossRef]
- Dawe, J.T.; Allen, S.E. Solution convergence of flow over steep topography in a numerical model of canyon upwelling. J. Geophys. Res. Ocean. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Sima, S.; Tajrishy, M. Using satellite data to extract volume–area–elevation relationships for Urmia Lake, Iran. J. Great Lakes Res. 2013, 39, 90–99. [Google Scholar] [CrossRef]
- Qiao, B.J.; Zhu, L.P.; Wang, J.B.; Ju, J.T.; Ma, Q.F.; Huang, L.; Chen, H.; Liu, C.; Xu, T. Estimation of lake water storage and changes based on bathymetric data and altimetry data and the association with climate change in the central Tibetan Plateau. J. Hydrol. 2019, 578, 124052. [Google Scholar] [CrossRef]
- Yang, F.; Su, D.; Yue, M.; Feng, C.; Yang, A.; Wang, M. Refraction Correction of Airborne LiDAR Bathymetry Based on Sea Surface Profile and Ray Tracing. IEEE Trans. Geoence Remote Sens. 2017, 55, 6141–6149. [Google Scholar] [CrossRef]
- Kiss, T.; Sipos, G. Braid-scale channel geometry changes in a sand-bedded river: Significance of low stages. Geomorphology 2007, 84, 209–221. [Google Scholar] [CrossRef]
- Kurowski, M.; Thal, J.; Damerius, R.; Korte, H.; Jeinsch, T. Automated Survey in Very Shallow Water using an Unmanned Surface Vehicle—ScienceDirect. IFAC-PapersOnline 2019, 52, 146–151. [Google Scholar] [CrossRef]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Abou-Mahmoud, M.E.E. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef] [Green Version]
- Flener, C.; Lotsari, E.; Alho, P.; Kyhk, J. Comparison of empirical and theoretical remote sensing based bathymetry models in river environments. River Res. Appl. 2012, 28, 118–133. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Flampouris, S.; Ziemer, F. Determination of Bathymetric and Current Maps by the Method DiSC Based on the Analysis of Nautical X-Band Radar Image Sequences of the Sea Surface (November 2007). IEEE Trans. Geosci. Remote Sensing. 2008, 46, 2267–2279. [Google Scholar] [CrossRef]
- Gao, H. Satellite remote sensing of large lakes and reservoirs: From elevation and area to storage. Wiley Interdiscip. Rev. Water 2015, 2, 147–157. [Google Scholar] [CrossRef]
- Gao, L.; Liao, J.; Shen, G. Monitoring lake-level changes in the Qinghai-Tibetan Plateau using radar altimeter data (2002–2012). J. Appl. Remote Sens. 2013, 7, 073470. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Li, R.; Tian, L.; Murch, B. MODIS observations of the bottom topography and its inter-annual variability of Poyang Lake. Remote Sens. Environ. 2011, 115, 2729–2741. [Google Scholar] [CrossRef]
- Cretaux, J.F.; Abarca-Del-Rio, R.; Berge-Nguyen, M.; Arsen, A.; Drolon, V.; Clos, G.; Maisongrande, P. Lake Volume Monitoring from Space. Surv. Geophys. 2016, 37, 269–305. [Google Scholar] [CrossRef] [Green Version]
- Lei, Z.; Xianyou, M.; Honglan, J.I.; Baosen, Z. Research on water depth inversion in reservoir area based on multi band remote sensing data. J. Hydraul. Eng. 2018, 49, 639–647. [Google Scholar]
- Wang, J.; Chen, M.; Zhu, W.; Hu, L.; Wang, Y. A Combined Approach for Retrieving Bathymetry from Aerial Stereo RGB Imagery. Remote Sens. 2022, 14, 760. [Google Scholar] [CrossRef]
- Randazzo, G.; Barreca, G.; Cascio, M.; Crupi, A.; Fontana, M.; Gregorio, F.; Lanza, S.; Muzirafuti, A. Analysis of Very High Spatial Resolution Images for Automatic Shoreline Extraction and Satellite-Derived Bathymetry Mapping. Geosciences 2020, 10, 172. [Google Scholar] [CrossRef]
- Kim, J.S.; Baek, D.; Seo, I.W.; Shin, J. Retrieving shallow stream bathymetry from UAV-assisted RGB imagery using a geospatial regression method. Geomorphology 2019, 341, 102–114. [Google Scholar] [CrossRef]
- Shen, X.; Ouyang, Z.; Leeuw, J.D. Constructing A DEM of Baiyang Lake Area from A Series of Landsat Images. Geogr. Geo-Inf. Sci. 2005, 21, 16–19. [Google Scholar]
- Duan, Z.; Bastiaanssen, W.G.M. Estimating water volume variations in lakes and reservoirs from four operational satellite altimetry databases and satellite imagery data. Remote Sens. Environ. 2013, 134, 403–416. [Google Scholar] [CrossRef]
- Changming, Z.; Xin, Z.; Ming, L.; Jiancheng, L. Lake Storage Change Automatic Detection by Multi-source Remote Sensing without Underwater Terrain Data. Acta Geod. Et Cartogr. Sin. 2015, 44, 309. [Google Scholar]
- Specht, M.; Specht, C.; Lewicka, O.; Makar, A.; Dbrowski, P.S. Study on the Coastline Evolution in Sopot (2008-2018) Based on Landsat Satellite Imagery. J. Mar. Sci. Eng. 2020, 8, 464. [Google Scholar] [CrossRef]
- Xu, N.; Ma, Y.; Zhou, H.; Zhang, W.; Zhang, Z.; Wang, X.H. A Method to Derive Bathymetry for Dynamic Water Bodies Using ICESat-2 and GSWD Data Sets. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Fair, Z.; Flanner, M.; Brunt, K.M.; Fricker, H.A.; Gardner, A. Using ICESat-2 and Operation IceBridge altimetry for supraglacial lake depth retrievals. Cryosphere 2020, 14, 4253–4263. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, L.; Daut, G.; Ju, J.; Lin, X.; Wang, Y.; Zhen, X. Investigation of bathymetry and water quality of Lake Nam Co, the largest lake on the central Tibetan Plateau, China. Limnology 2009, 10, 149–158. [Google Scholar] [CrossRef]
- Li, C.Y.; Sun, B.; Gao, Z.Y.; Zhang, S. Retrieval model of water depth in Hulun Lake using multi-spectral remote sensing. Shuili Xuebao/J. Hydraul. Eng. 2011, 42, 1423–1431. [Google Scholar]
- Bagheri, S.; Stein, M.; Dios, R. Utility of hyperspectral data for bathymetric mapping in a turbid estuary. Int. J. Remote Sens. 1998, 19, 1179–1188. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Busker, T.; de Roo, A.; Gelati, E.; Schwatke, C.; Adamovic, M.; Bisselink, B.; Pekel, J.-F.; Cottam, A. A global lake and reservoir volume analysis using a surface water dataset and satellite altimetry. Hydrol. Earth Syst. Sci. 2019, 23, 669–690. [Google Scholar] [CrossRef] [Green Version]
- Xu, N.; Ma, X.; Ma, Y.; Zhao, P.; Yang, J.; Wang, X.H. Deriving Highly Accurate Shallow Water Bathymetry From Sentinel-2 and ICESat-2 Datasets by a Multitemporal Stacking Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6677–6685. [Google Scholar] [CrossRef]
- Lian, F.; Hu, C.; Chen, X.; Cai, X.; Tian, L.; Gan, W. Assessment of inundation changes of Poyang Lake using MODIS observations between 2000 and 2010. Remote Sens. Environ. 2012, 121, 80–92. [Google Scholar]
- Shankman, D.; Liang, Q. Landscape Changes and Increasing Flood Frequency in China’s Poyang Lake Region. Prof Geogr. Prof. Geogr. 2003, 55, 434–445. [Google Scholar] [CrossRef]
- Woosung Horizontal Zero. Available online: http://baike.baidu.com/view/173481.htm (accessed on 6 March 2022).
- Weiya, M. Study on The Application of Excel to Pearson Type III Distribution Multi-samples Parameter Estimation in Hydrology. Agric. Technol. 2005, 25, 93–95. [Google Scholar]
- Lin, L.; Wang, L. Estimation of Annual Maximum Diurnal Precipitation for Reappearance Periods with Pearson-III Distribution. Meteorol. Sci. Technology. 2005, 33, 314–317. [Google Scholar]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Wang, B.; Miao, F.; Chen, J. The construction and application of normalized difference water index (NDWI) based on the ASTER image. Sci. Surv. Mapp. 2008, 33, 177–179. [Google Scholar]
- Zhang, J.; Kuligowski, R.J.; Parihar, J.S.; Guo, W.; Saito, G. Quantitative retrieval of crop water content under different soil moistures levels. Proc. Spie 2006, 6411, 85–93. [Google Scholar]
- Gautam, V.K.; Gaurav, P.K.; Murugan, P.; Annadurai, M. Assessment of Surface Water Dynamicsin Bangalore Using WRI, NDWI, MNDWI, Supervised Classification and K-T Transformation. Aquat. Procedia 2015, 4, 739–746. [Google Scholar] [CrossRef]
- Shankman, D.; Keim, B.D.; Song, J. Flood frequency in China’s Poyang Lake region: Trends and teleconnections. Int. J. Climatol. 2006, 26, 1255–1266. [Google Scholar] [CrossRef] [Green Version]
- Mei, X.; Dai, Z.; Du, J.; Chen, J. Linkage between Three Gorges Dam impacts and the dramatic recessions in China’s largest freshwater lake, Poyang Lake. Sci. Rep. 2015, 5, 18197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Min, Q.; Zhan, L. Characteristics of low-water changes in Lake Poyang during 1952-2011. J. Lake Sci. 2012, 24, 675–678. [Google Scholar]
- Xingwang, W.G.L.Y.F. Bottom topography change patterns of the Lake Poyang and their influence mechanisms in recent 30 years. J. Lake Sci. 2015, 27, 1168–1176. [Google Scholar]
- Jiuwei, H.; Dunyin, W.; Rongfang, L. Analysis of Fluvial Process of Hukou Reach in Poyang Lake Basin. J. China Hydrol. 2011, 31, 46–49. [Google Scholar]
- Song, C.; Ye, Q.; Sheng, Y.; Gong, T. Combined ICESat and CryoSat-2 Altimetry for Accessing Water Level Dynamics of Tibetan Lakes over 2003–2014. Water 2015, 7, 4685–4700. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Xie, H.; Kang, S.; Yi, D.; Ackley, S.F. Monitoring lake level changes on the Tibetan Plateau using ICESat altimetry data (2003–2009). Remote Sens. Environ. 2011, 115, 1733–1742. [Google Scholar] [CrossRef]
- Kleinherenbrink, M.; Lindenbergh, R.C.; Ditmar, P.G. Monitoring of lake level changes on the Tibetan Plateau and Tian Shan by retracking Cryosat SARIn waveforms. J. Hydrol. 2015, 521, 119–131. [Google Scholar] [CrossRef]
- Jiang, L.; Nielsen, K.; Andersen, O.B.; Bauer-Gottwein, P. Monitoring recent lake level variations on the Tibetan Plateau using CryoSat-2 SARIn mode data. J. Hydrol. 2017, 544, 109–124. [Google Scholar] [CrossRef] [Green Version]
- Zhu, W.B.; Jia, S.F.; Lv, A.F. Monitoring the Fluctuation of Lake Qinghai Using Multi-Source Remote Sensing Data. Remote Sens. 2014, 6, 10457–10482. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Li, J.; Wang, J.; Chen, J.; Ke, C. Assessing water storage changes of Lake Poyang from multi-mission satellite data and hydrological models. J. Hydrol. 2020, 590, 125229. [Google Scholar] [CrossRef]
- Lehner, B.; Doll, P.P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. Amst. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Arsen, A.; Calmant, S.; Kouraev, A.; Vuglinski, V.; Bergé-Nguyen, M.; Gennero, M.C.; Nino, F.; Abarca Del Rio, R.; Cazenave, A.; et al. SOLS: A lake database to monitor in the Near Real Time water level and storage variations from remote sensing data. Adv. Space Res. 2011, 47, 1497–1507. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Göttl, F.; Boergens, E. Database for Hydrological Time Series of Inland Waters (DAHITI). In Proceedings of the Ocean Surface Topography Science Team Meeting, Lake Constance, Germany, 28–31 October 2014. [Google Scholar]
- Bernhard, L.; Reidy, L.C.; Carmen, R.; Charles, V.; Balazs, F.; Philippe, C.; Petra, D.; Marcel, E.; Karen, F.; Jun, M.; et al. High-resolution mapping of the world’s reservoirs and dams for sustainable river-flow management. Front. Ecol. Environ. 2011, 9, 494–502. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Number of Points | MRE (%) | RMSE (m) |
|---|---|---|---|
| Section I | 14 | 17.24 | 1.37 |
| Section II | 25 | 3.41 | 0.49 |
| Section III | 18 | 7.14 | 1.27 |
| Section IV | 15 | 5.20 | 0.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Yang, W.; Li, J.; Zhang, Z.; Meng, L. A Novel Method for Mapping Lake Bottom Topography Using the GSW Dataset and Measured Water Level. Remote Sens. 2022, 14, 1423. https://doi.org/10.3390/rs14061423
Li Y, Yang W, Li J, Zhang Z, Meng L. A Novel Method for Mapping Lake Bottom Topography Using the GSW Dataset and Measured Water Level. Remote Sensing. 2022; 14(6):1423. https://doi.org/10.3390/rs14061423
Chicago/Turabian StyleLi, Yuanxi, Wei Yang, Junjie Li, Zhen Zhang, and Lingkui Meng. 2022. "A Novel Method for Mapping Lake Bottom Topography Using the GSW Dataset and Measured Water Level" Remote Sensing 14, no. 6: 1423. https://doi.org/10.3390/rs14061423