1. Introduction
Global Navigation Satellite Systems’ Radio Occultation (GNSS-RO) is an atmospheric remote sensing/atmospheric sounding technique currently being employed to complement the radiosonde [
1] and reanalysis [
2,
3] products in order to improve the derived upper tropopause-lower stratosphere (UTLS) atmospheric profiles used in numerical weather prediction (NWP) models that generate global weather forecasting [
4], as well as climate change studies [
5,
6]. GNSS-RO operates in such a way that the precise phase observations of a rising or setting GNSS satellite, which increase while passing through the atmospheric layers, are collected by the receivers onboard low Earth orbit (LEO) satellites. The measured phase delays (also called excess phases) are used to derive bending angles, which form the key observable used to retrieve the atmospheric profiles of temperature and pressure needed for NWP models as well as climate change studies (see, e.g., [
7,
8]). GNSS-RO theory, including the inversion of the phase delays to the atmospheric refractivity using Abel transformation, is well documented in different literature, e.g., [
7,
8,
9,
10,
11,
12,
13].
Different larger LEO satellites, such as Gravity Recovery and Climate Experiment (GRACE [
14]), Meteorological Operational (MetOp [
15]), and Constellation Observing System for Meteorology, Ionosphere, and Climate (COSMIC-1 [
14], and COSMIC-2 [
16]), are equipped with the RO antennas suited for the GNSS-RO [
17]. However, these satellites are utilised with the high-grade components in their buses and payloads, which increase their complexity, budget, and the time required for building and launching. In terms of costs, for example, COSMIC-1 and -2 required more than USD 100 and USD 460 million, respectively, to be completed [
18]. As opposed to the larger LEO satellites above, low-cost CubeSats such as 3U CanX-2 [
19] and 3U ARMADILLO [
20] are currently being tested for GNSS-RO applications. CubeSats in general are small low-cost satellites with limited power budgets that are built from the commercial off-the-shelf (COTS) components in 10 × 10 × 10 cm
3 units (1U). A 3U CubeSat can cost USD 20 K–USD 200 K depending on the onboard payload. The launch cost could be less than USD 40 K, which can be significantly reduced for mass launches in a constellation since several CubeSats will have a ride-share. The complexity and required budget, as well as the building time, of CubeSats are much less than those of larger LEO satellites, where these factors may even prevent the continuation of larger LEO missions, as evidenced in the second phase of COSMIC-2 that was cancelled due to funding problems [
21]. Moreover, the technological advancements in the COTS components and the possibility of launching them in a constellation make them comparable to the larger LEO satellites in terms of their applicability in a wide range of space and earth science applications.
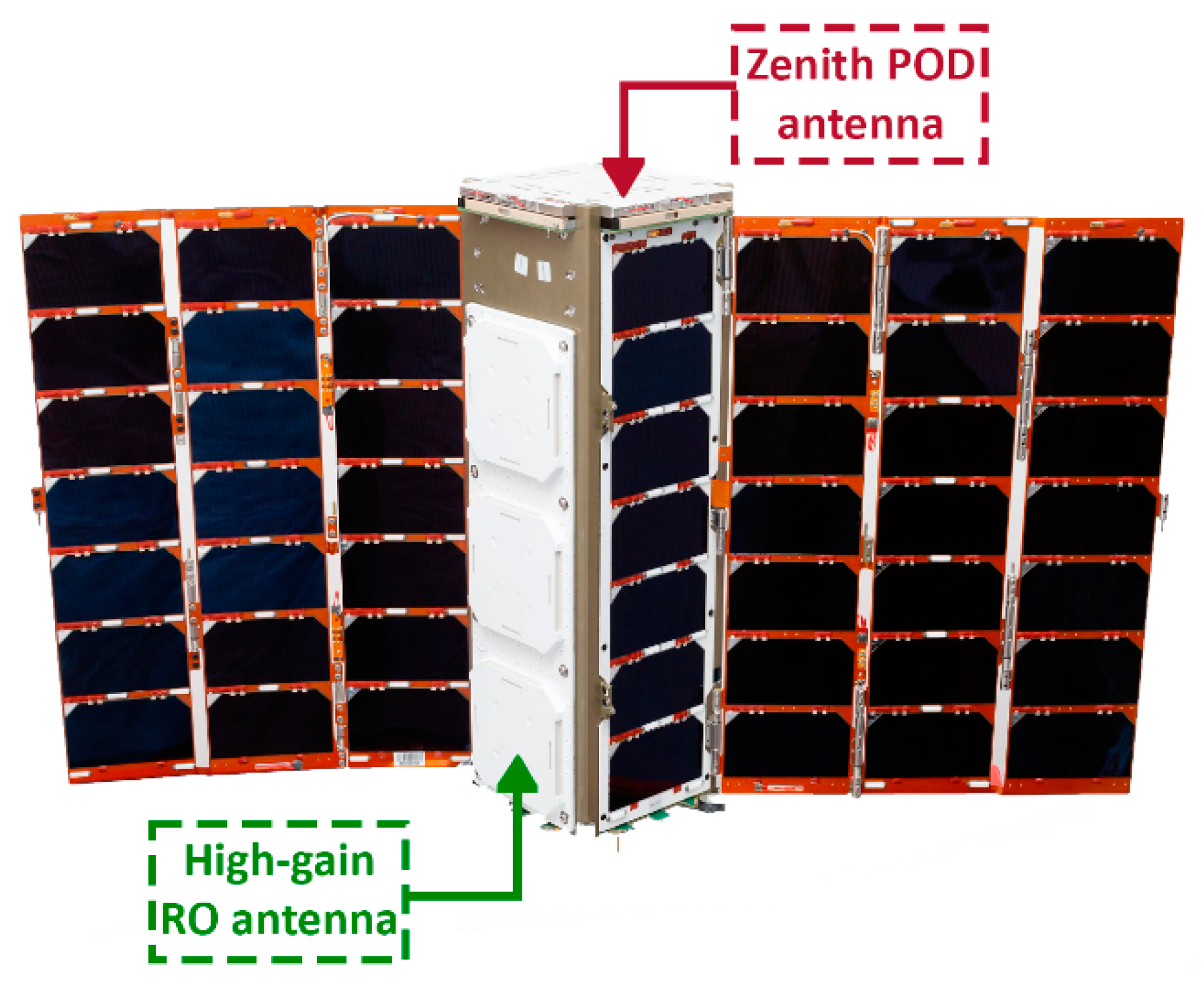
The mega constellation of CubeSats launched by Spire Global Inc. [
https://spire.com accessed on 12 January 2022] is an example of CubeSats’ constellation that provides different services such as global weather monitoring using the GNSS-RO procedure, maritime domain awareness, and automatic dependent surveillance-broadcast. This constellation consists of more than 145 3U CubeSats (10 × 10 × 30 cm
3) equipped mostly with STRATOS GNSS receivers that collect 50-Hz dual-frequency GNSS-RO signals. These signals and those that are collected by the zenith antenna mounted for the precise orbit determination (POD) are processed in the analysis center to provide daily globally distributed and high-quality atmospheric vertical profiles that bring substantial benefits to the performance of the NWP models [
22].
To achieve accurate UTLS atmospheric profiles, however, the orbital accuracy of LEO satellites used for GNSS-RO should be at several centimeters level, and the velocity components, mainly along-track direction, should be better than 0.2 mm/s [
23]. The orbital precisions and accuracies of the Spire CubeSats have already been estimated using the reduced-dynamic POD (RD-POD) and internally validated in [
24] and found to be at an acceptable range for the GNSS-RO application. Besides the orbital parameters, the accuracy of the estimated clocks and their stabilities are essential for GNSS-RO since the high-rate observations, e.g., at 50 Hz sample intervals, should be precisely time-tagged based on the estimated clock offsets. As such, any error or instability in these clocks affects the measured phase observations and subsequently the derived GNSS-RO atmospheric profiles.
The accuracy of the estimated clocks and their stabilities are influenced by the quality of the oscillators and the remaining GNSS errors in the RD-POD models [
25]. Larger LEO satellites (e.g., GRACE and COSMIC-2) are generally equipped with highly accurate oscillators that provide high stabilities at the
to
level [
26,
27]. However, this level of stability can be degraded by any unmodelled errors in the RD-POD procedure or the GNSS data quality. For example, the reduction in the clock stabilities to the
to
level, which is observed for COSMIC satellites, has been related to the quality of the GPS observations due to the inclined POD antenna orientation and its field of view, the accuracy of the attitude control systems, and the quality and the type of the onboard GPS receiver [
26]. In addition, some periodic variations due to the GPS orbital period have been found in the GRACE clock analysis and proposed to be considered in the clock modelling [
28]. For CubeSats, however, besides the general studies that show the CubeSats’ evolution (e.g., [
29]) and their capabilities in the earth science applications (e.g., [
30]), most studies have concentrated on evaluating the stabilities of the onboard CubeSats’ oscillators and developing compatible atomic clocks based on CubeSats’ limitations. For example, Warren et al. [
31] analysed the developed atomic clocks based on optical pumping for the CubeSats while Rybak et al. [
32] simulated the performance of the chip-scale atomic clocks for the navigation of a CubeSat in lunar orbit. To the best of the authors’ knowledge, no literature exists on the assessment and evaluation of CubeSats’ clock stabilities due to un-modelled errors in the POD procedure and their propagated impacts on the determined GNSS-RO profiles.
This study aims at assessing and evaluating the CubeSats’ clock stabilities and their possible impacts on the derived UTLS atmospheric products. The specific objectives of the study are (i) assessing CubeSats’ clock stabilities resulting from un-modelled errors during the RD-POD procedure and evaluating possible remedies, and (ii) analysing the derived GNSS-RO profiles from unstable CubeSats’ clocks in comparison to COSMIC-2.
Section 2 starts by presenting the RD-POD procedure and the excess phase derivation before assessing CubeSats’ clock instabilities emanating from GNSS observational quality, hardware biases, un-modelled phase center variations, and relativistic effects. To have a better understanding of the ranges of the errors in the RD-POD compared to the quality of oscillators and their influences on the CubeSats’ clocks, the estimated clocks are compared to those of COSMIC-2 that have USOs. These are also analysed for the first time from the stability of receiver clocks’ point of view. Possible remedies in the RD-POD procedure to improve the accuracy of the estimated clocks are evaluated and discussed in addition to addressing the practical solutions for the unstable CubeSats’ clocks in GNSS-RO. To evaluate the CubeSats’ GNSS-RO atmospheric profiles derived from the excess phase observations while the CubeSats’ clock errors are removed using the complex solutions, they are compared in
Section 3 to those of COSMIC-2 profiles and in situ radiosonde observations, which provide a completely independent data source for validation.
Section 4 summarises and concludes the study.
3. Evaluation of the CubeSats’ Derived GNSS-RO Profiles
The RO atmospheric temperature profiles from the COSMIC-2 constellation and the data from the radiosonde observations, provided by the National Centers for Environmental Information (NCEI) through the Integrated Global Radiosonde Archive [
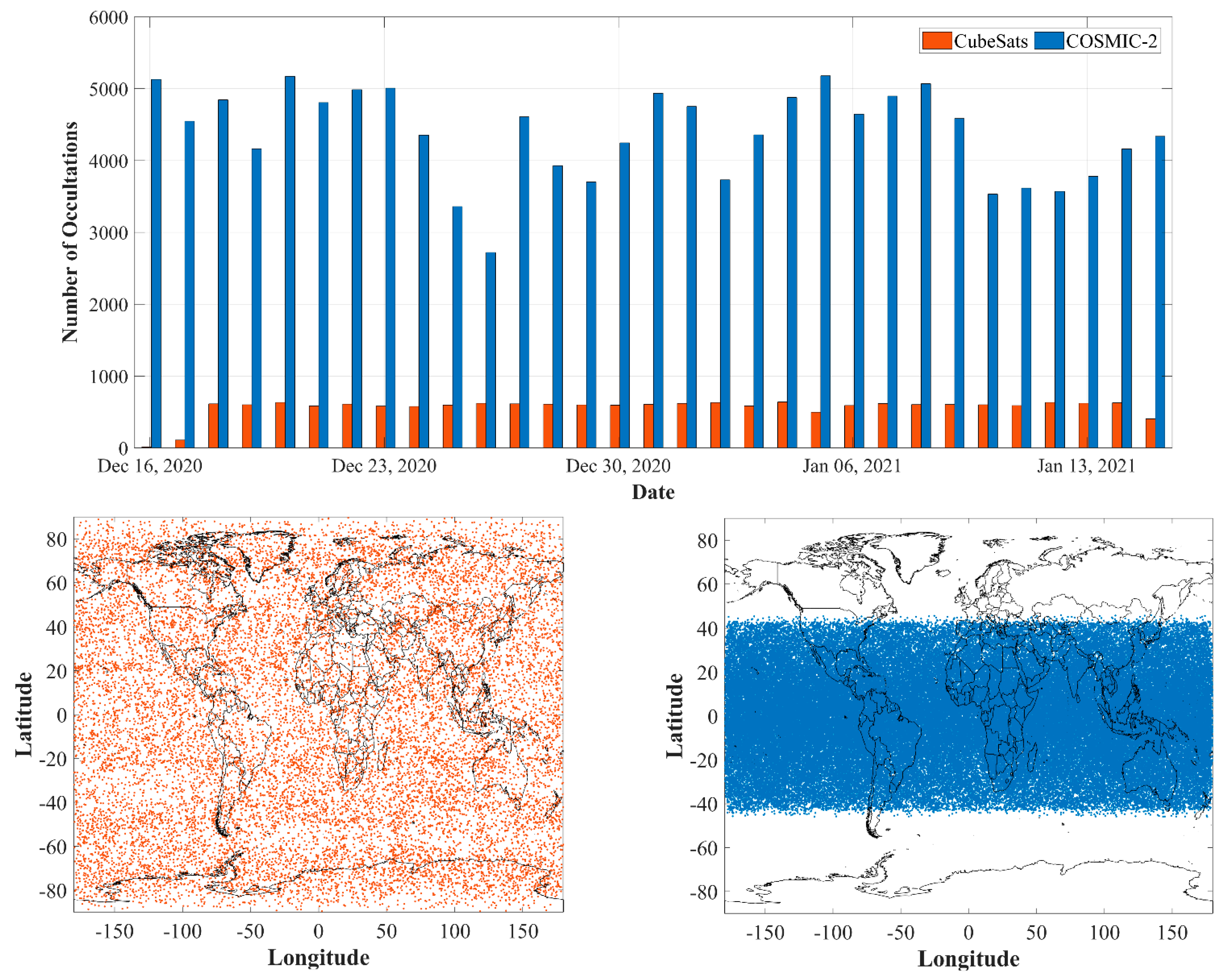
68], are used to evaluate the CubeSats RO profiles derived from the SD excess phase in Equation (7). Available occultations from COSMIC-2 satellites and these 17 CubeSats over the testing period (16 Dec 2020 to 15 Jan 2021) are plotted in
Figure 12 (top). Note that the number of occultations for the CubeSats is related to only 17 tested CubeSats and not all 145 CubeSats flying in the Spire Global constellation. Despite the Spire occultations being available for all ranges of latitudes (even from the only 17 tested CubeSats in
Figure 12 (bottom left)), the COSMIC-2 does not provide the RO products for the high latitude and the polar regions (
Figure 12 (bottom right)). This is mainly due to the type of the orbits and their inclinations as provided in
Table 7. The second launch of the COSMIC-2 constellation with six satellites (COSMIC-2B) in higher inclined orbits (72°) was supposed to fill this gap; however, it was cancelled due to financial problems in building and launching these large LEO satellites [
21]. This confirms the benefits of the affordable CubeSats compared with the expensive larger LEO satellites.
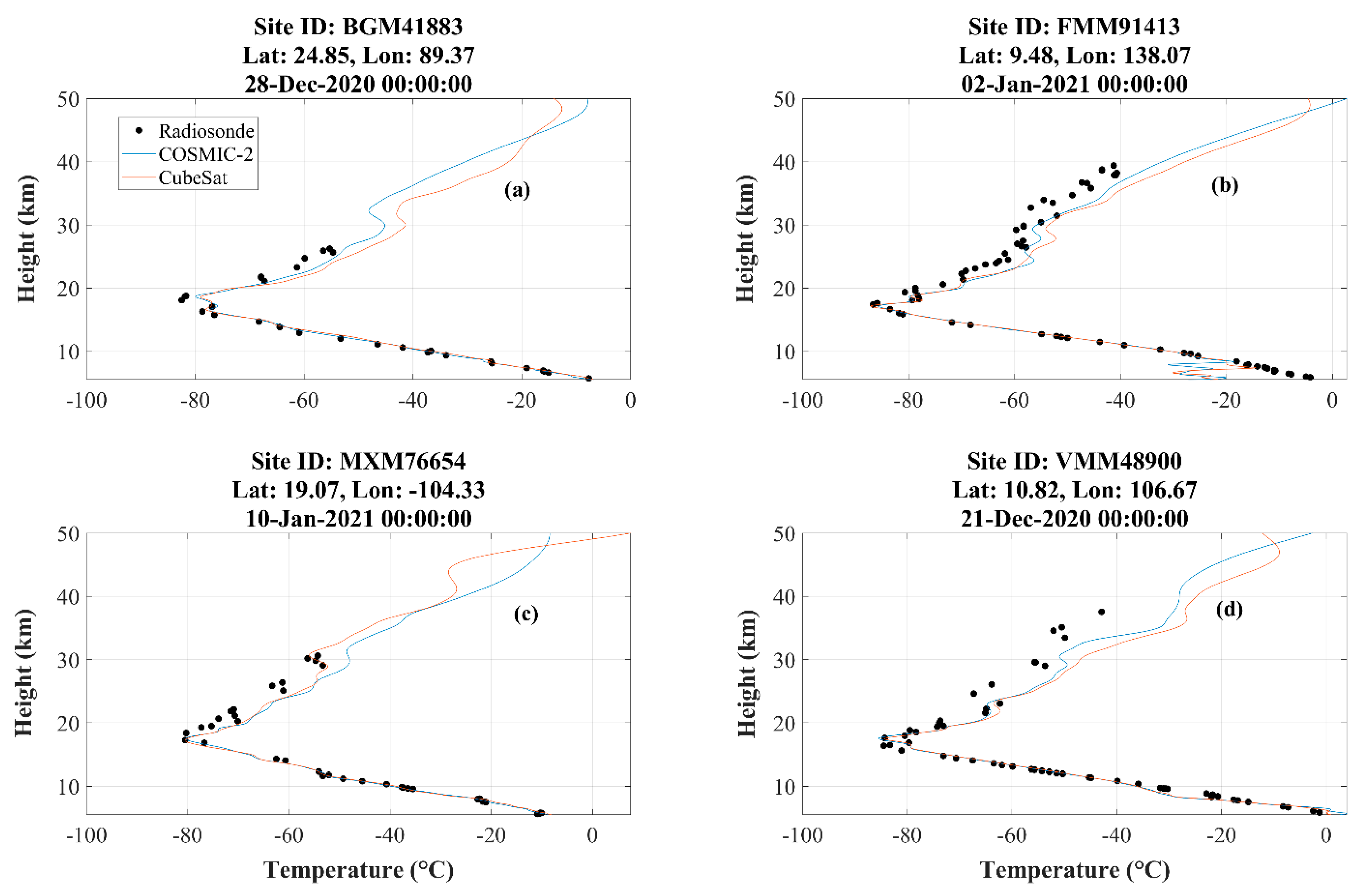
The radiosonde observations of four stations on four different dates are used to compare the temperature profiles. These radiosonde stations are located at Bogra in Bangladesh (BGM41883), Yap in the Caroline Islands (FMM91413), Manzanillo in Mexico (MXM76654), and Tan Son Hoa in Vietnam (VMM48900).
Figure 13 compares the temperature profiles of CubeSats, COSMIC-2, and nearby radiosonde observations. Both CubeSats and COSMIC-2 profiles agree with the radiosonde observations to better than 1 °C for the vertical heights less than 20 km.
Table 8 provides the mean and the standard deviation values for these agreements for different altitudes. The temperature values from both constellations are close to each other for the heights below 30 km, with the best temperature agreement observed around the UTLS (tropopause) region between 10 and 20 km, i.e., 1.49 and 1.19 °C for CubeSats and COSMIC-2, respectively. The differences for the heights above 30 km are large.
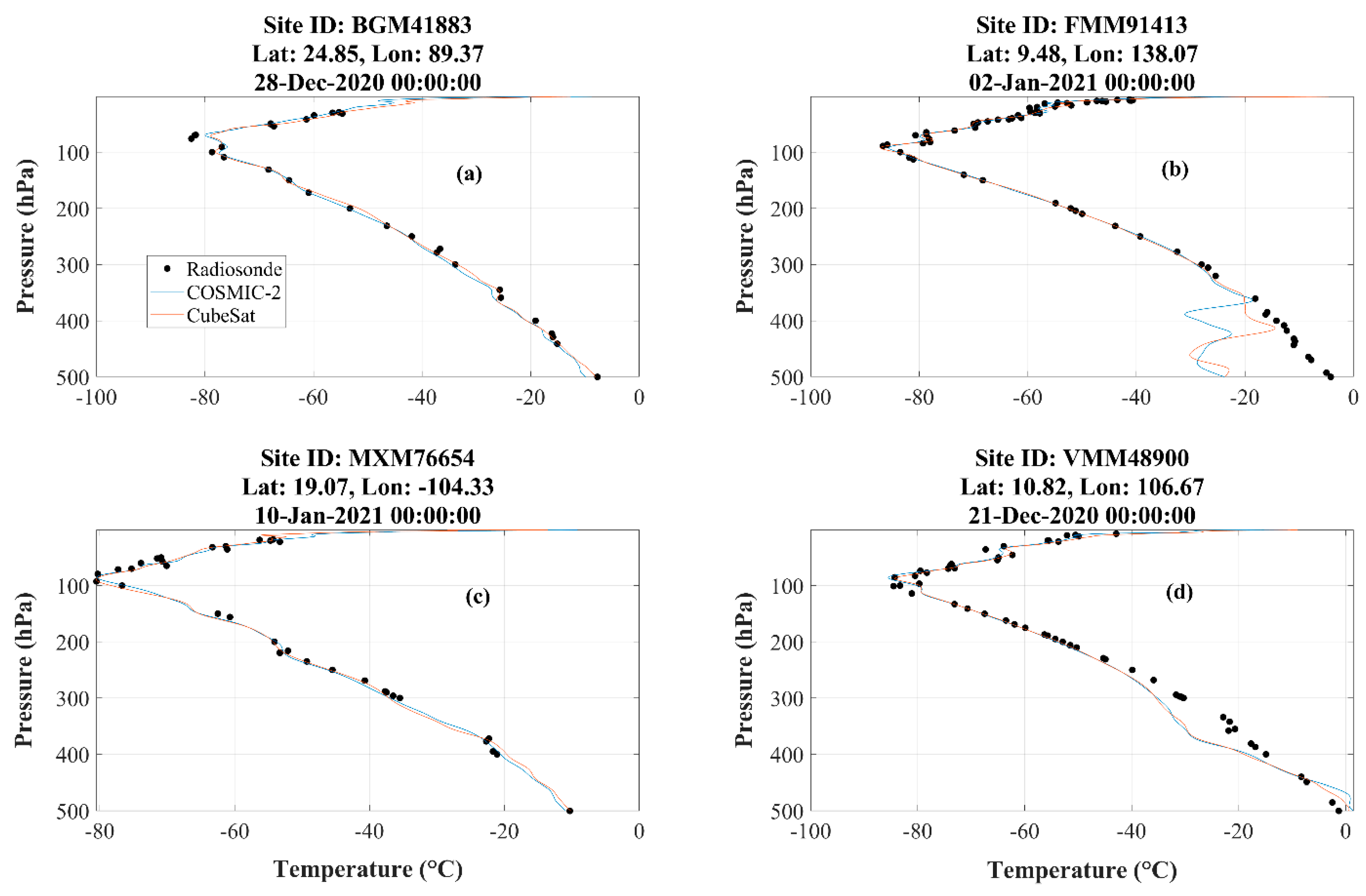
Additional evaluation of CubeSats’ derived GNSS-RO is obtained by plotting temperature versus pressure in
Figure 14, which further shows the agreement between the CubeSats and the COSMIC-2 products compared to radiosonde observations. The agreements between the temperature values for pressures less than 300 hPa for CubeSats, COSMIC-2, and the radiosonde observations are obvious even with the visual inspection. However,
Table 9 provides the means and standard deviations of this agreement. The perfect agreement of less than 0.1°C for the pressures less than 100 hPa is observed in the CubeSat data, which is even better than 0.68 °C for COSMIC-2. The large biases in the station FFM (
Figure 14b) for the pressures higher than 300 hPa cause the large values of mean and the standard deviation of the temperature for that pressure range.
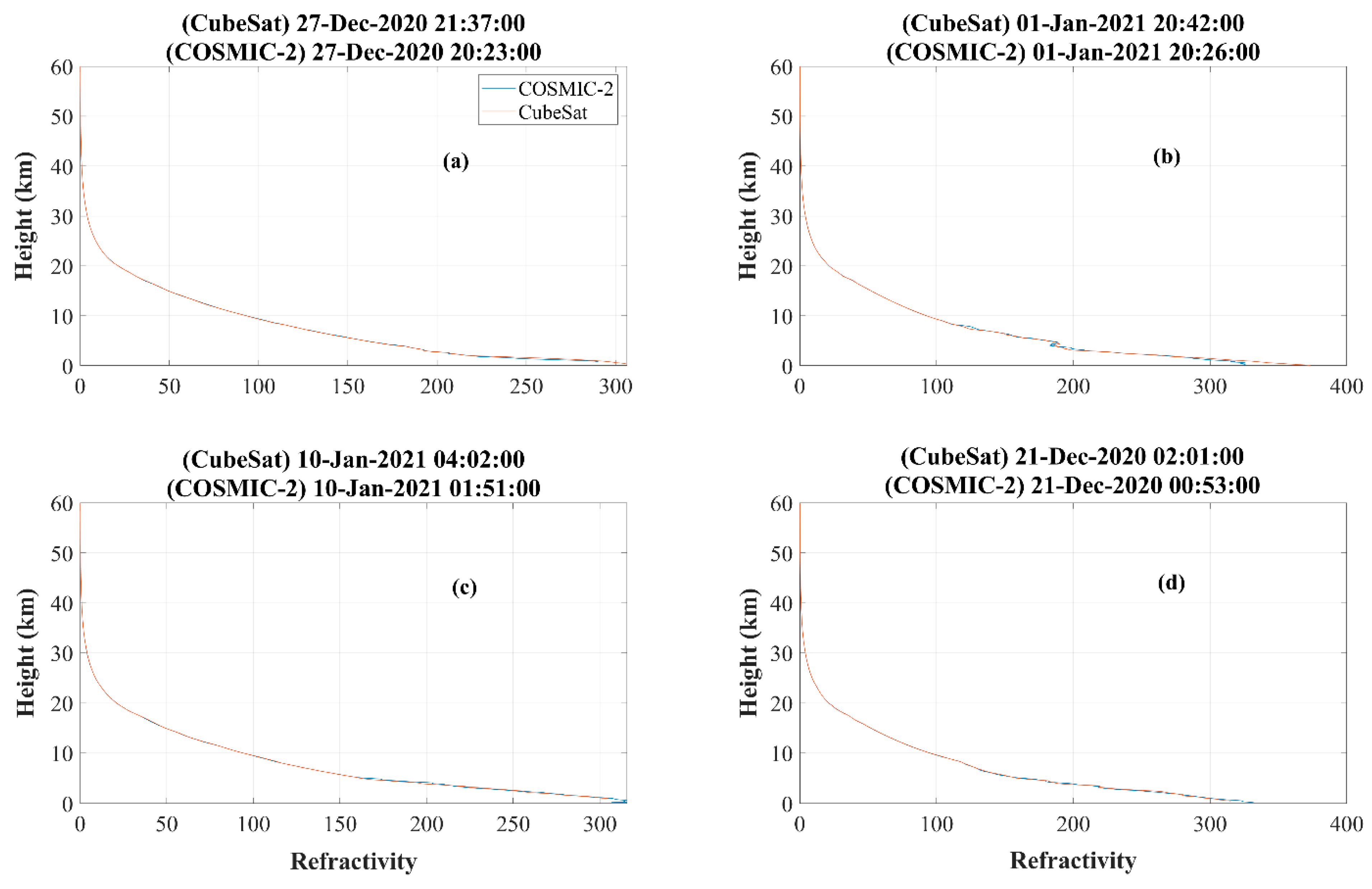
The refractivity comparisons between the CubeSats and the COSMIC-2 profiles for four random dates, i.e., 21 and 27 of December 2020 and 1 and 10 January 2021, are plotted in
Figure 15. The RMS value for the differences between the refractivity from CubeSats and COSMIC-2 for the heights more than 10 km is 0.11, indicating an agreement between the two profiles. This value reaches 4.7 for heights lower than 10 km.
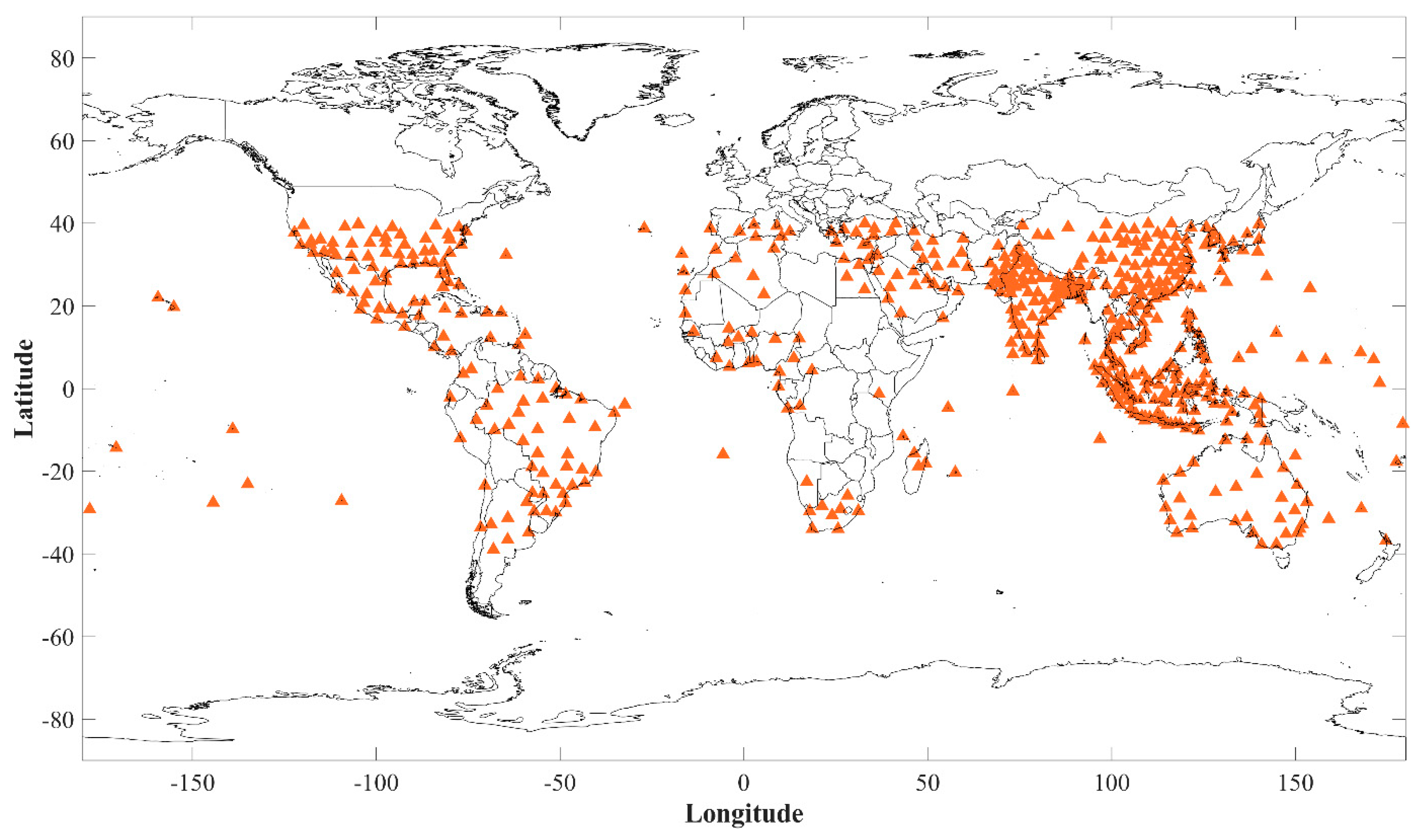
Finally, the Kling-Gupta Efficiency metric (
KGE, Equation (9)) that combines the correlation (
), bias (
), and the variability (
) is used to provide an overall performance of CubeSats and COSMIC-2 products against in situ radiosondes [
69]:
where
is the ratio of the estimated and the observed mean, and
is the ratio of the estimated and observed variations derived from the means and the standard deviations. The radiosonde observations from 562 globally distributed stations shown in
Figure 16 are used to compute the KGE values. To estimate the correlation, the observations from 50 stations co-located with the CubeSats and COSMIC-2 profiles are selected. Each pair of linear correlation is calculated between CubeSats, COSMIC-2, and radiosonde observations, and the mean of the correlation coefficient is used in Equation (9). The estimated KGE values for the CubeSats and the COSMIC-2 profiles against radiosonde observations are given in
Table 10, where the values closer to 1 represent better agreement with the radiosonde observations. From the results in
Table 10, it can be seen that CubeSats have close KGE values to COSMIC-2, thus indicating a good agreement of both products.
4. Summary and Conclusions
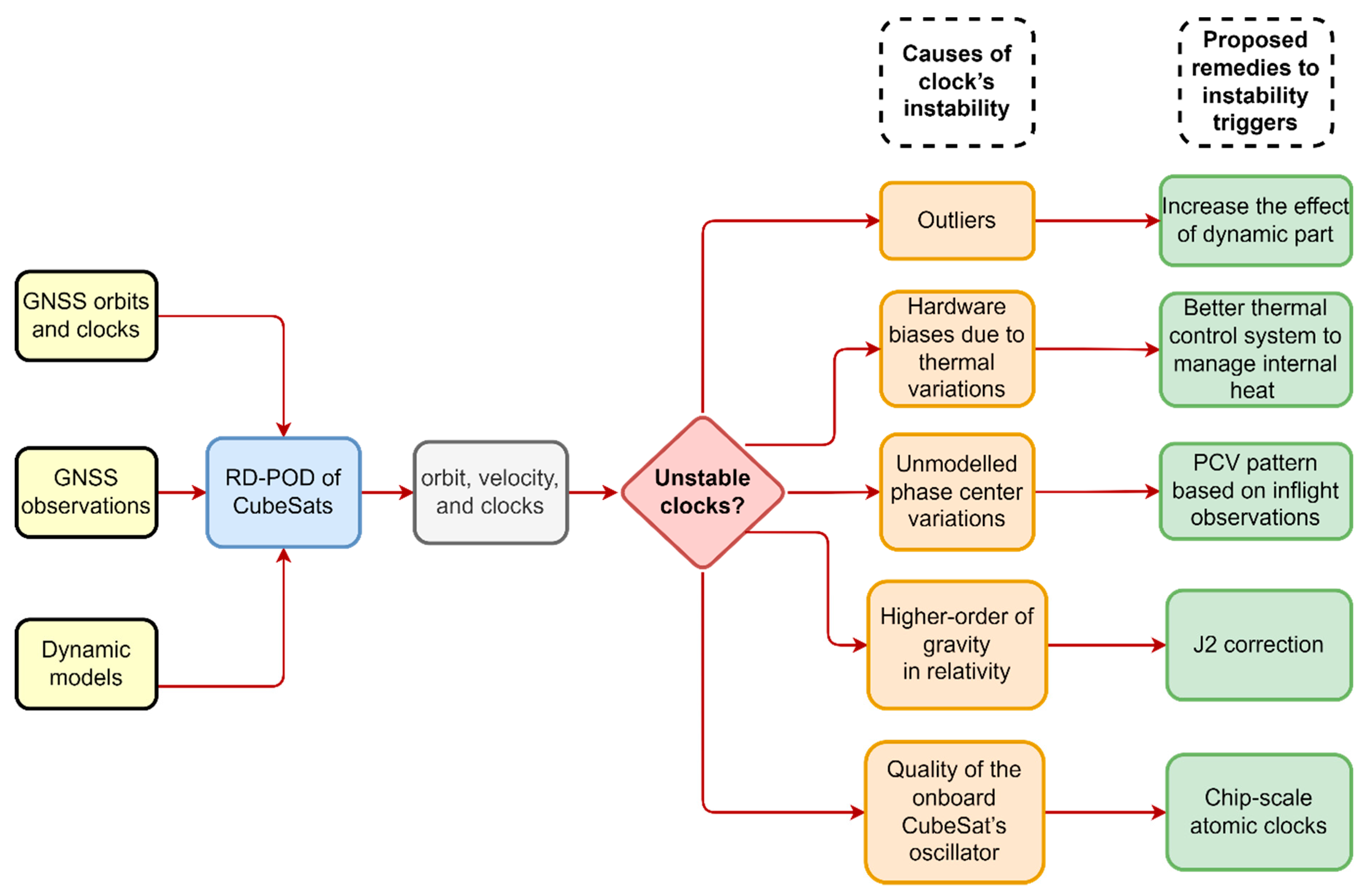
The stabilities of the CubeSats’ clocks that are estimated in the RD-POD procedure are important for high-rate applications such as GNSS-RO. These stabilities are affected by the following factors:
- -
The ratio of the outliers in the observations derived from pre-processing steps;
- -
The number of stochastic accelerations that are estimated in the POD procedure;
- -
The CubeSats’ hardware biases due to, e.g., the thermal variations in space;
- -
The nominal PCV values derived from ground calibration methods that do not consider the inflight situation;
- -
The higher order of geopotential forces and their effects on relativity;
- -
The quality of the frequency oscillator;
- -
The float ambiguities and their impacts on the estimated clocks.
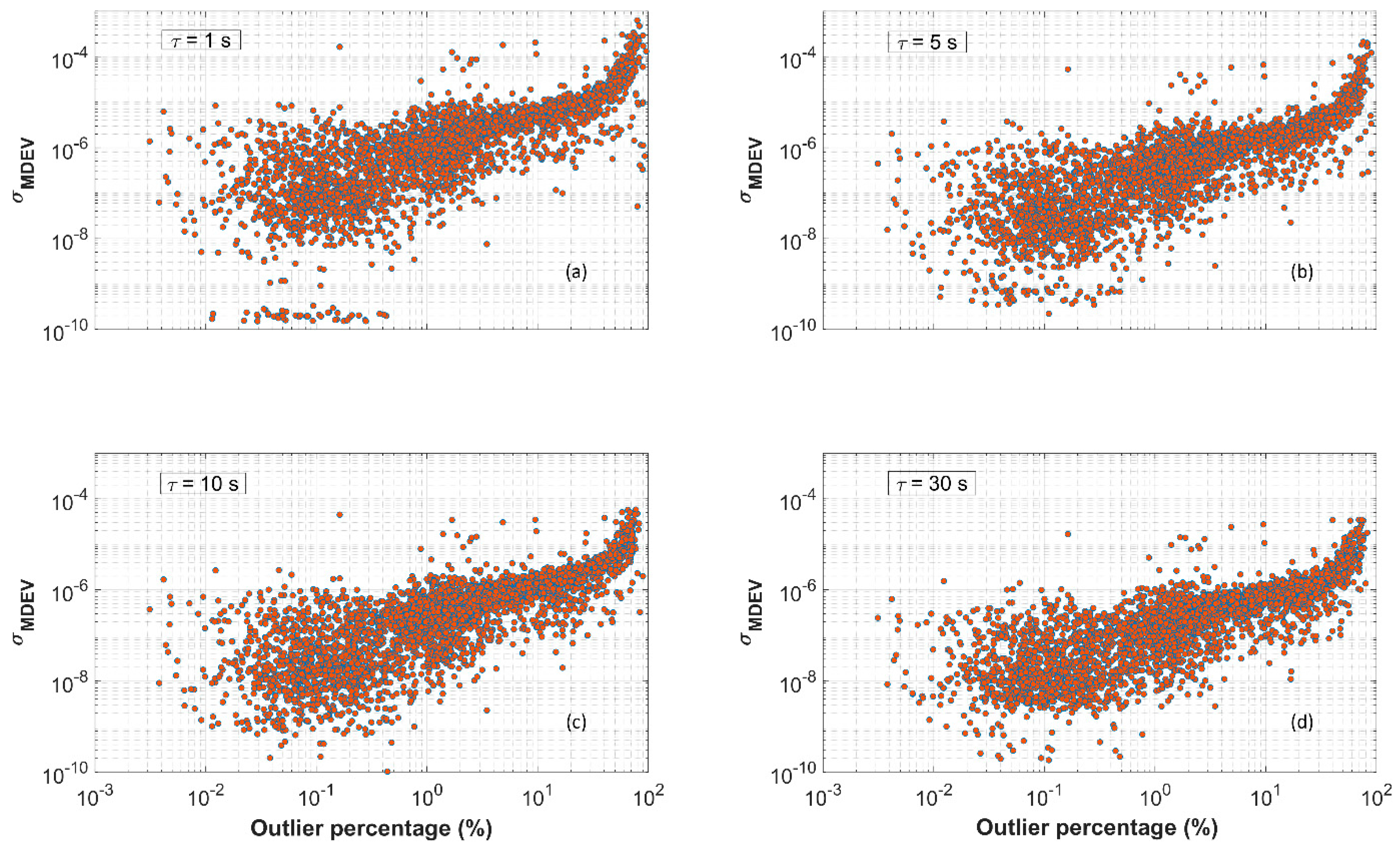
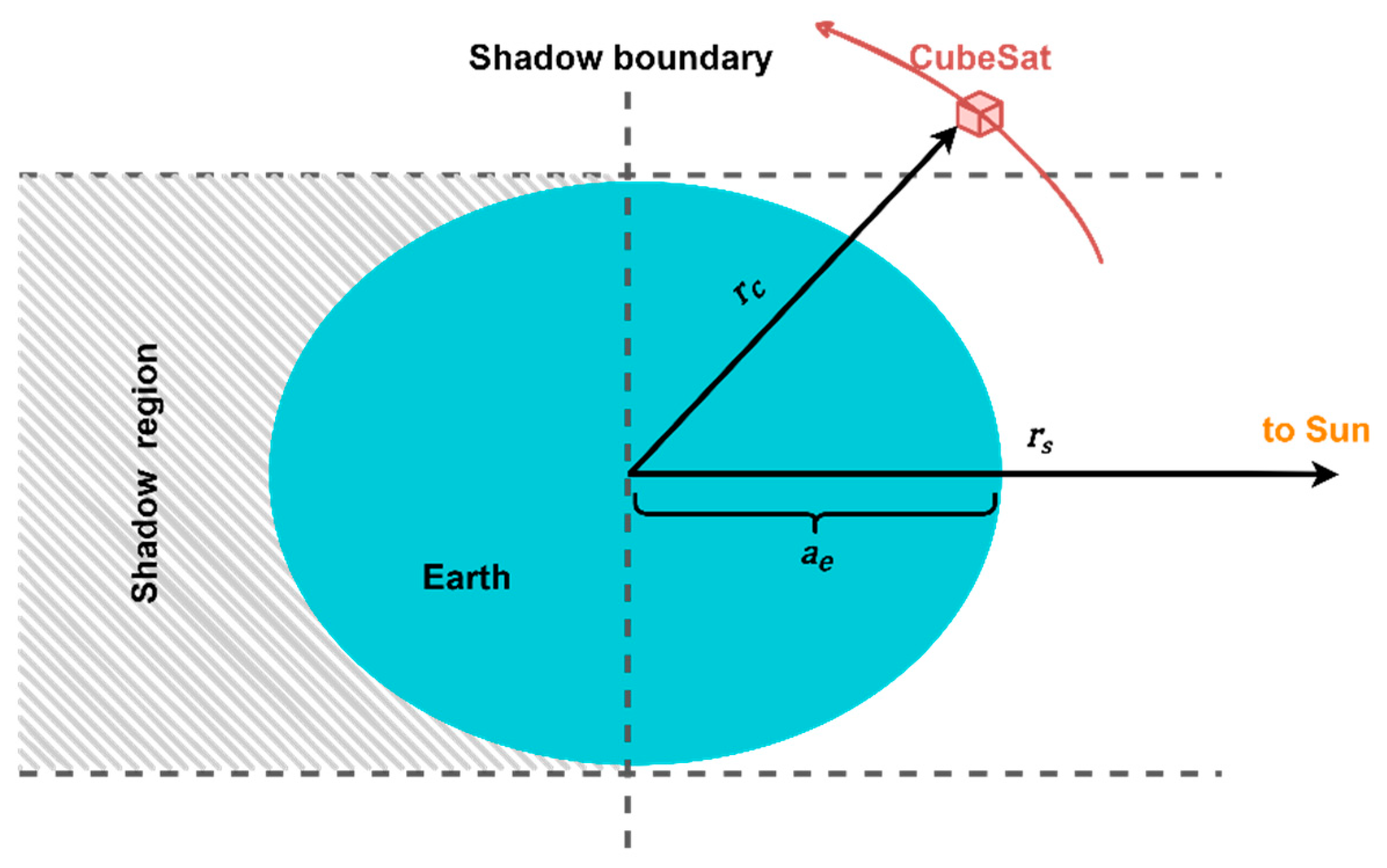
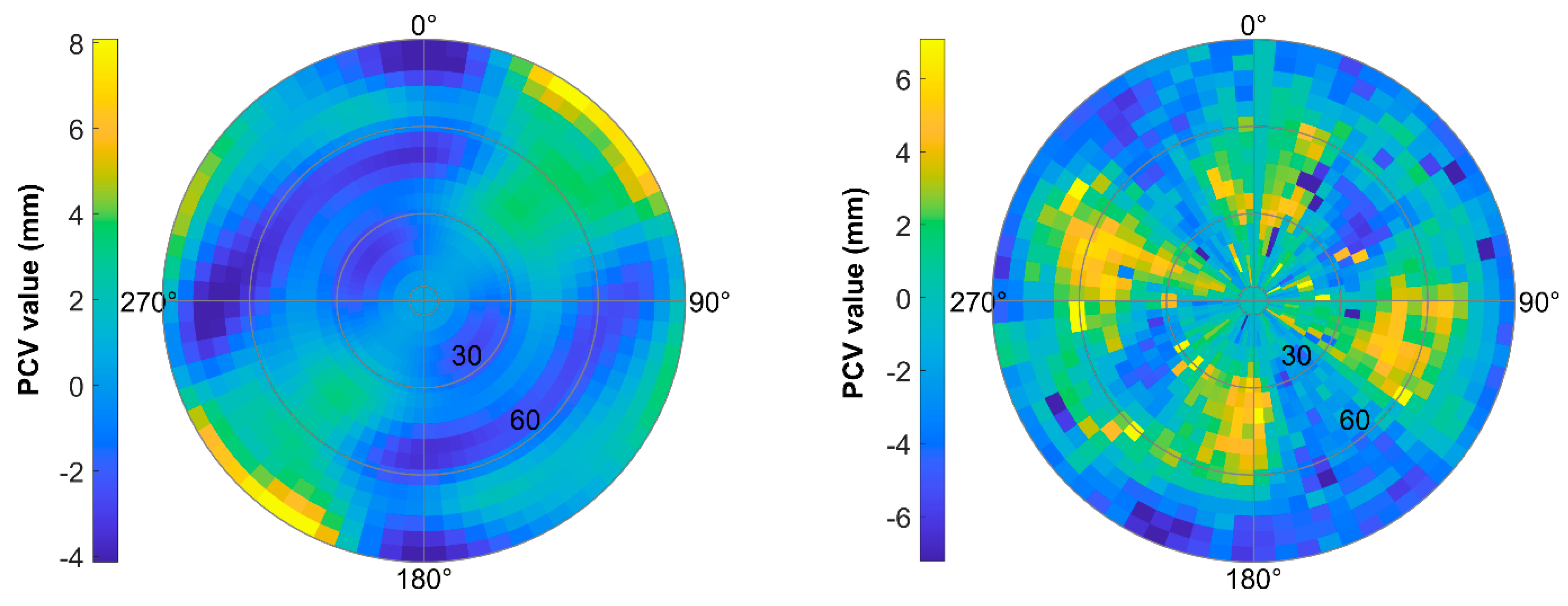
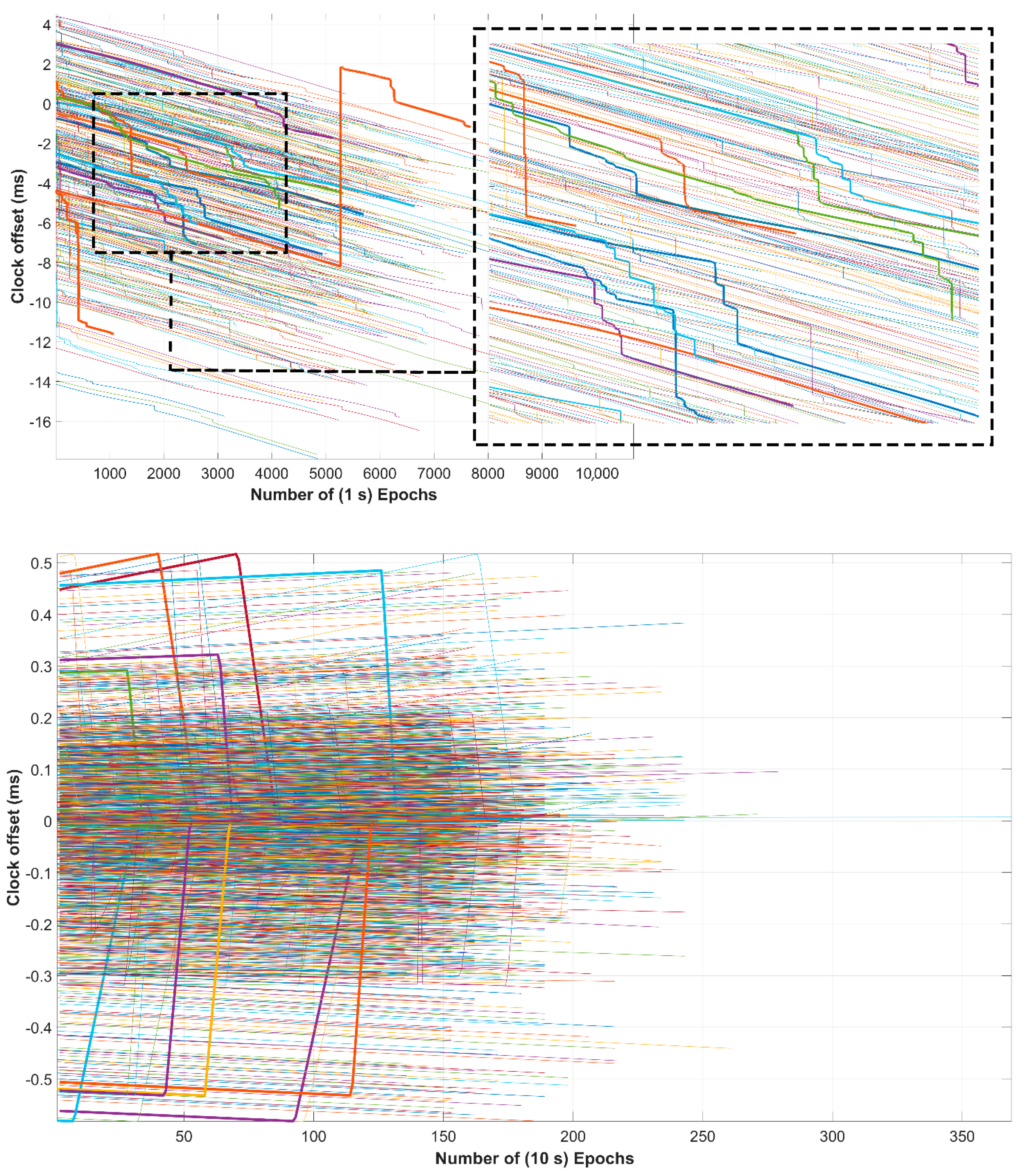
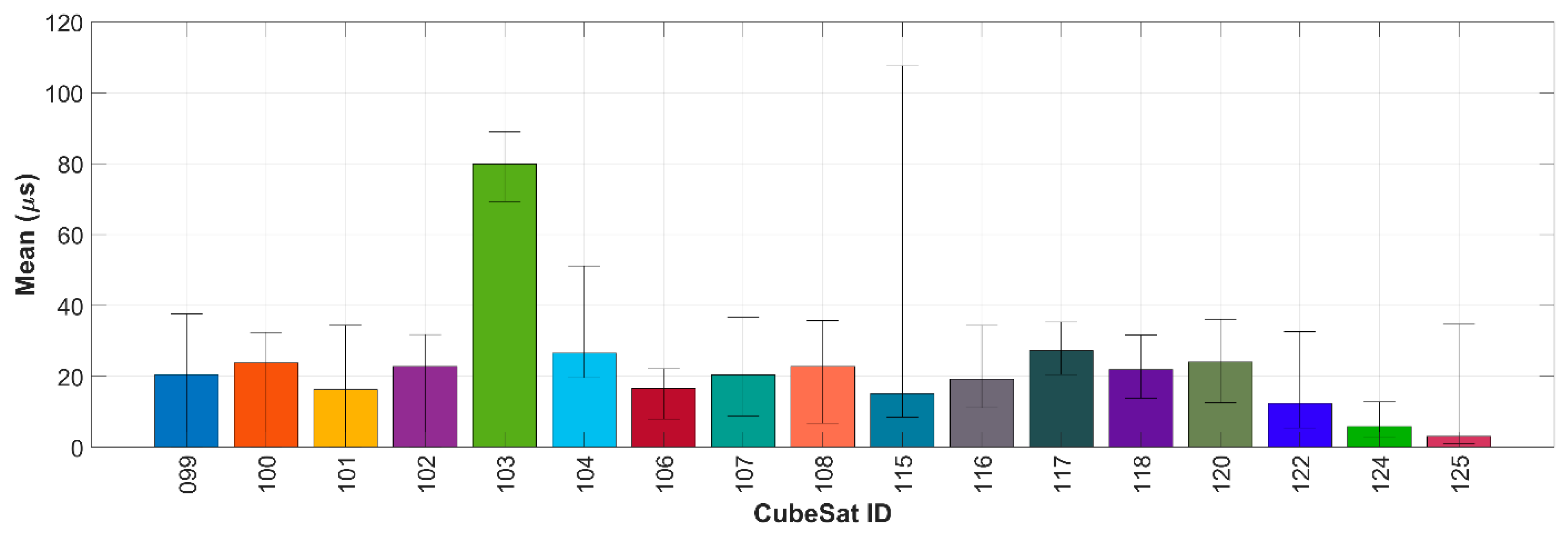
The impacts of these clock instability triggers were assessed for a set of CubeSats that have been launched for GNSS-RO. The stabilities of the CubeSats’ clocks are worse than when the ratio of observation outliers is higher than 50%. This value can even drop to the level for the high percentage of outliers (>90%). By increasing the number of stochastic accelerations including the estimation of velocity pulses at every 7.5 min and using constant accelerations for 3 min intervals, the short-term stabilities have been refined to the to level. To represent the impact of clock hardware biases due to thermal variations on the clock stabilities, a cylindrical shadow model was used to detect the CubeSat’s positions in the shadow of the earth, where the temperature drops and the direct sunlight as the dominant heat source is absent. The comparison of the estimated clocks for these regions with the clocks from the orbit in the sunlight revealed the impact of thermal variations on clock stabilities. Better thermal control systems may be required to handle the internal heat transfer between the COTS components of the CubeSats as well as the external heat sources. The new phase center variation (PCV) patterns are derived from the mean values of the observation residuals for different elevation and azimuth angles. Despite the nominal PCV values that are computed from ground calibrations, this pattern represents the actual multipath effect due to the CubeSat’s structure. The short-term stability improvements of the clocks after using this pattern varies from to for different CubeSats. Applying the J2 correction due to the earth’s oblateness in addition to the signal delays resulting from the central gravity and the clock deviations because of the relativity effect improves the CubeSat’s clock stability at the to level. In the analysis of the CubeSats’ clocks, several-millisecond-long jumps were observed, which seems to be due to the quality of the frequency oscillator. Such large jumps are not available for COSMIC-2 satellites that are equipped with ultra-stable oscillators. To show the impacts of all the aforementioned instability triggers, a final RD-POD round for all CubeSats is performed by applying all possible corrections together in the POD procedure. The results show improvements of several microseconds in the estimated clocks compared to the uncorrected clock estimations, thus confirming the improvement in the short-term stabilities after applying the proposed corrections. However, comparing with the COSMIC-2 clocks reveals the dominant role of the quality of the oscillators in the CubeSats’ clock instabilities. To deal with this limitation for the GNSS-RO application and derive the excess phase observations, single difference combinations between the reference GNSS satellite and the occulted one are formed. The integer ambiguity resolution in the POD procedure is among future studies and its impacts on the short-term stabilities are not investigated in this study. However, it is expected to be substantially less than the impact of the quality of the frequency oscillator.
The evaluations of the profiles derived from the CubeSats’ excess phase observations are in great agreement with those of the COSMIC-2 constellation, as well as the in situ radiosonde observations that provided an external validation source. The temperature profiles largely agree with those of COSMIC-2 at the UTLS (tropopause) region between 10 and 20 km, i.e., a mean of 1.49 ± 2.12 °C (CubeSats) and 1.19 ± 2.10 °C (COSMIC-2). The CubeSats (0.12 ± 2.77 °C) surprisingly outperformed the COSMIC-2 satellites (0.68 ± 2.81 °C) in the temperature-pressure profiles for the pressures less than 100 hPa. The refractivity comparisons between CubeSats and COSMIC-2 satellites show great agreements for heights more than 10 km. The KGE metrics for both CubeSats and COSMIC-2 in comparison with radiosonde observations are very close to each other, indicating CubeSats’ capability for atmospheric sounding. This level of quality and the fact that CubeSat constellations can cover the whole earth, including the high-altitude and polar regions, in contrast to COSMIC-2, show their importance in the future of GNSS-RO, which would be significant to numerical weather prediction models for global weather forecasting.
Although short-term stability and accuracy at the nanosecond level (or even better) can be derived by the availability of the chip-scale and miniature atomic clocks for the CubeSats, there are still some limitations that need more advancements in technology, such as increasing the processing power, as well as, in theory, providing more efficient algorithms for the onboard POD. This will be subject to future studies.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}