The satellite geometry on 26 June 2021, was used employing the L1/L5 signals of GPS IIF satellites, and signals on the same frequencies from Galileo (E1, E5a) satellites and Beidou Navigation Satellite System (BDS)-3 (B1C, B2a) satellites for the network and user processing. The sampling interval of the observations is 1 s, and the elevation mask is set to 10 degrees. For continuity and accuracy purposes, the zenith-referenced standard deviations of the phase and code observations are set to 0.001 and 0.1 m, respectively. For the ionosphere interpolation, the
(see Equation (8)) is tested for 1.5 and 5 mm considering different ionosphere activities. At the user side, the zenith-referenced standard deviations of the phase and code observations are set to 0.003 and 0.3 m, respectively. The standard deviations of these parameters and of the system noise for temporal links are given in
Table 4. They will be applied in the tests in
Section 4.1 and
Section 4.2. The parameters tested for integrity purpose will be introduced in
Section 4.3. In the following contexts, “ambiguity-fixed” refers to the scenario with the PAR enabled, but not the case that full ambiguity resolution (FAR) is achieved. Note that for ambiguity resolution and the calculation of the ionosphere interpolation coefficients
(see Equation (11)), the standard deviations for accuracy and continuity purposes are used.
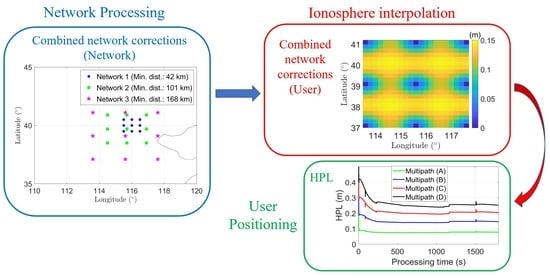
In the following subsections, the results of (i) network processing, (ii) user processing and (iii) HPLs are presented and discussed.
4.1. Network Processing
For each of the three networks mentioned before, the observations are simulated with the noise, hardware biases and the ZTDs as defined in
Table 4.
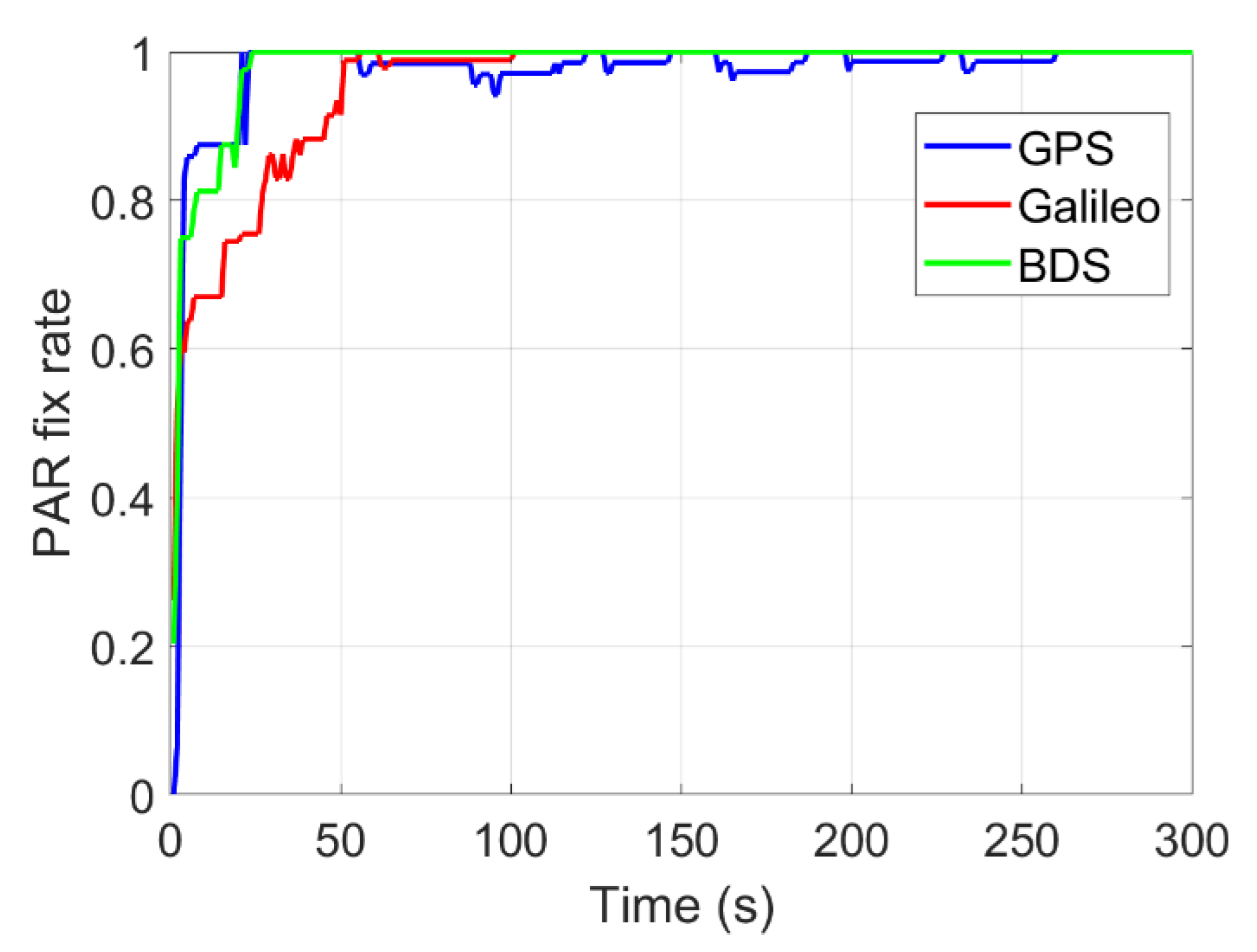
Figure 3 shows the fix rate of the PAR for the three constellations using Network 1. It can be observed that after about 5 min, FAR can be achieved for all three constellations. They remained resolved most of the time afterward.
As mentioned in
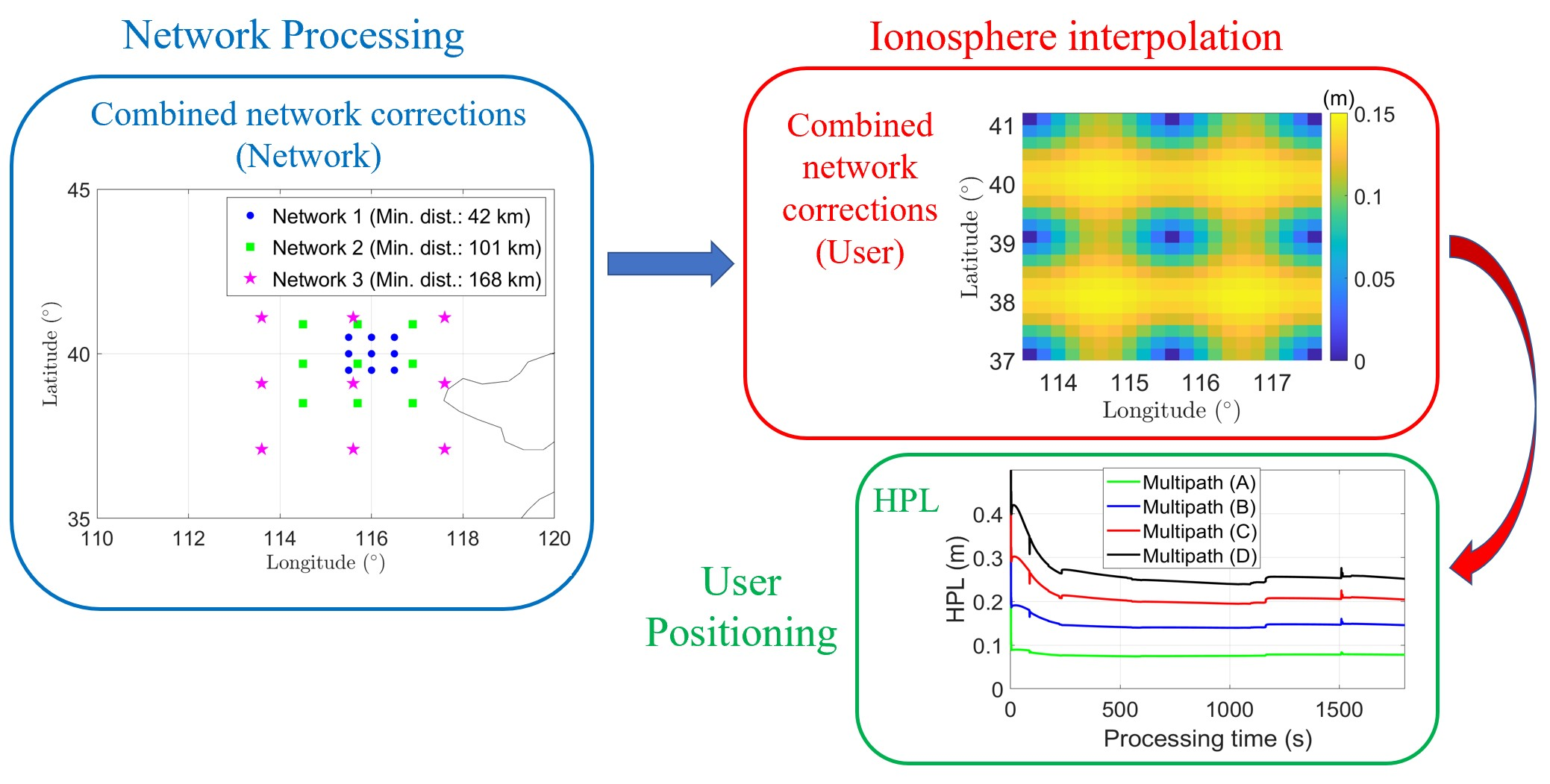
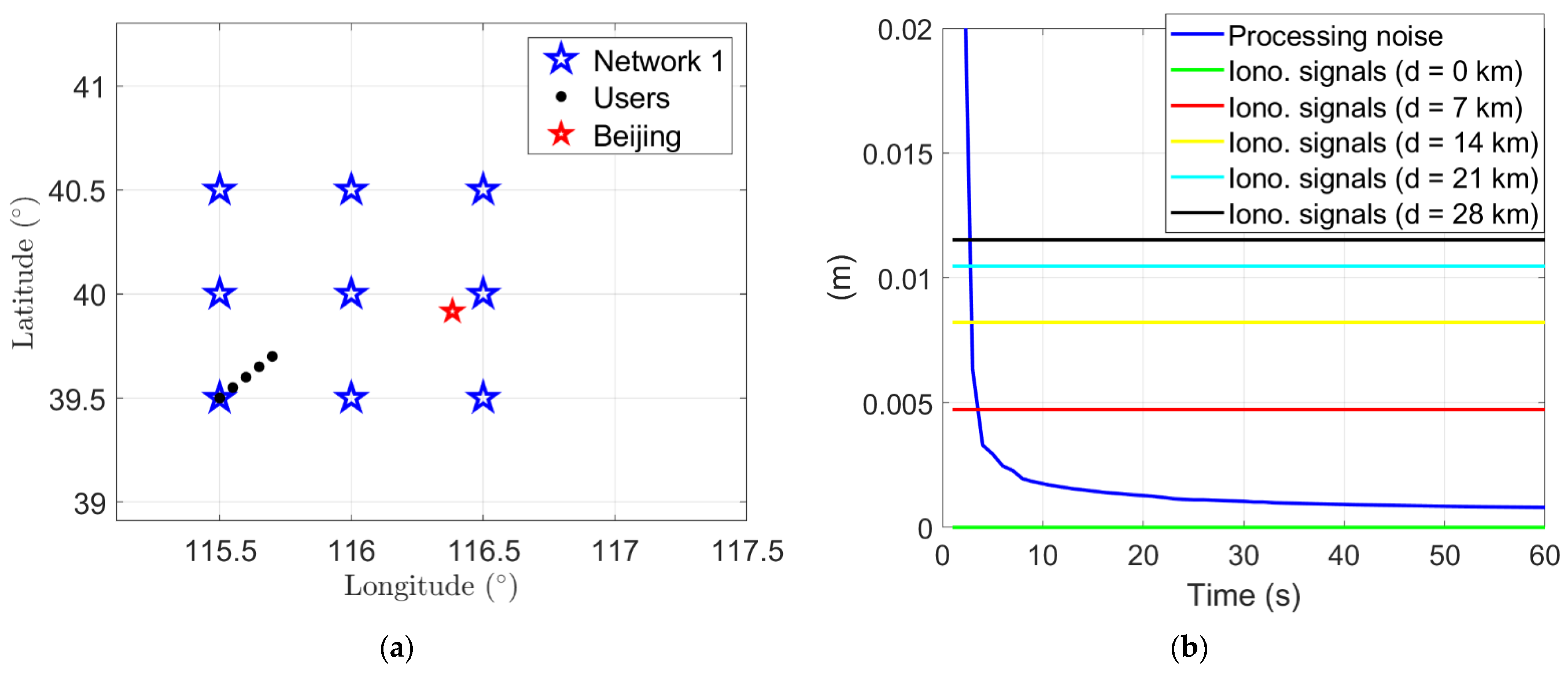
Section 2.2.2, the combined network corrections take an effective role at the between-satellite level in the user processing. Taking Network 1 as an example, the formal standard deviations of the between-satellite phase corrections on L1, for the satellite pair C26 and C29, are shown in
Figure 4b with the user ionospheric delays predicted as explained in
Section 2.2.1. The blue line corresponds to the errors induced only by the processing noise (the first part of the right side of Equation (14)), while the other colored lines correspond to the errors induced by the spatial correlation of the ionospheric signals (the second part of the right side of Equation (14)). The prediction matrices
are also calculated differently considering only these two types of errors. The user is assumed to be located at different spots with an increasing inter-station distance to the bottom left network station, as shown in
Figure 4a. Distance-dependent biases induced by ionospheric delays were proposed by [
42,
43]. Under a nominal ionospheric condition of 10 total electron content units (TECU), one may expect an ionospheric gradient of 1.5 mm/km for an elevation mask of 10 degrees. Assuming a Gaussian distribution of the ionospheric signals, the standard deviation of the differential ionospheric delays over 1 km baseline (
), which corresponds to about 68% percentile of the differential ionospheric delays over 1 km, is set to 1.5 mm here for nominal conditions and was used in
Figure 4b.
From
Figure 4b it can be observed that with the PAR enabled, the standard deviation of the between-satellite network corrections induced by the processing noise (see the blue line) converges quickly to a very small value, i.e., below 1 mm; they become ignorable compared to that induced by the ionosphere interpolation. This implies that in case of limited bandwidth of the data transfer between the network and the user, the V-C matrix of the network corrections can be omitted after the convergence of the network solutions. In such a case, only the spatial correlation of the ionospheric signals will be considered for the ionosphere interpolation and for the V-C matrix of the network corrections.
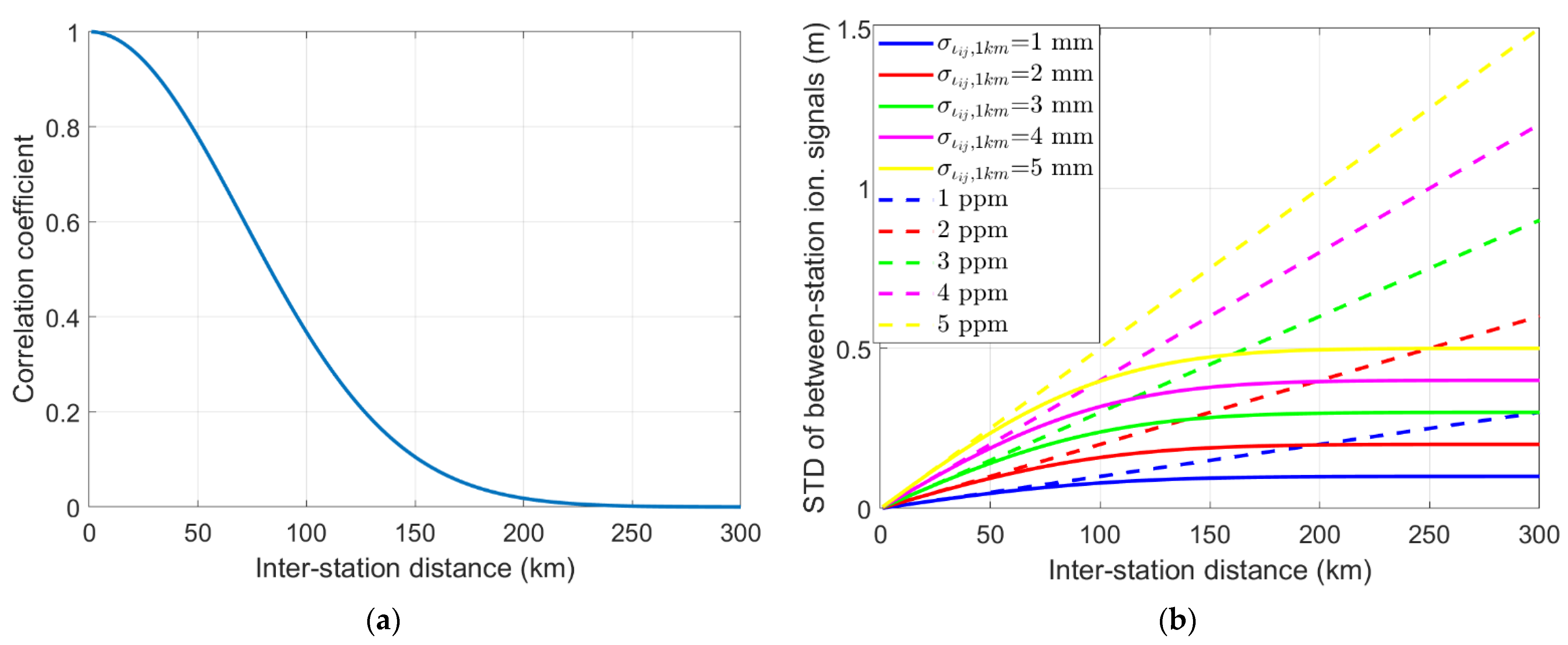
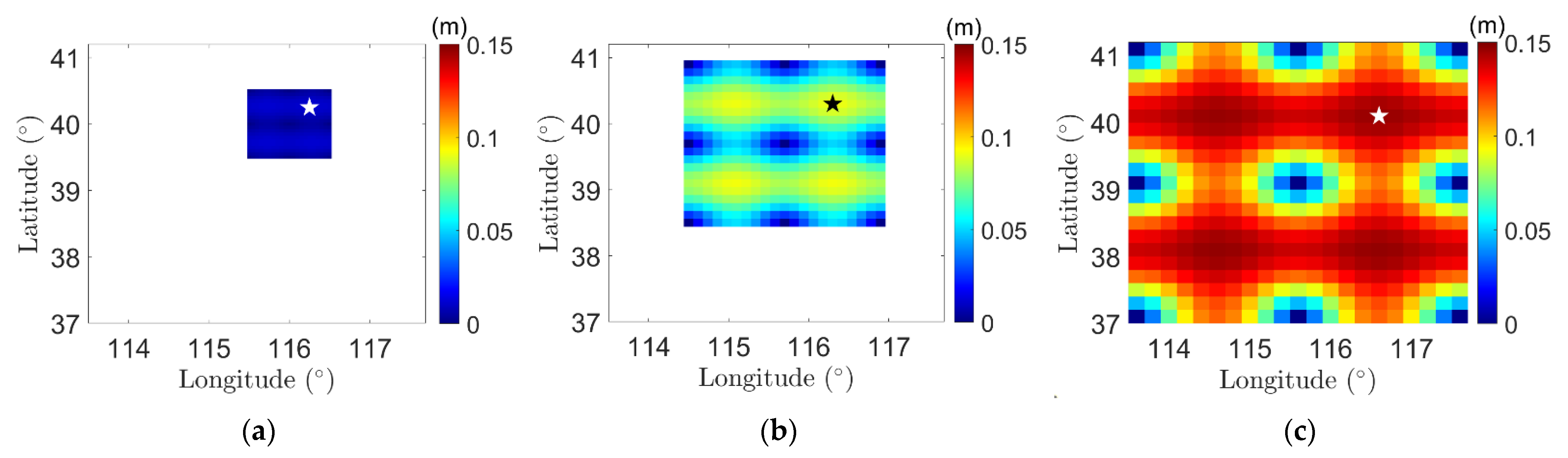
Figure 5 shows the colormaps of the precision of the between-satellite network corrections of C26 and C29 on L1 phase using Networks 1–3 after a convergence time of 60 s. Both the processing noise and spatial ionospheric signals are considered. The
is set to 1.5 mm. It can be seen that the density of the network stations (see
Figure 2) is an essential factor impacting the precision of the user ionosphere interpolation, and thus for that of the network corrections. Small inter-station distances of, e.g., about 40 km for Network 1 leads to a standard deviation of the between-satellite network corrections of around 1 cm on L1 phase, while the value increases to over 1 dm for an inter-station distance of about 170 km in Network 3. This would slow down the ambiguity resolution at the user side, and will be further explained in the next sub-section. For each network, one of the worst locations for the ionosphere interpolation (see the stars) is selected to evaluate the user positioning results and the IM. The distance from the star to the nearest network station amounts to about 35, 84 and 140 km, respectively, in the three networks.
4.2. User Processing
With the satellite clocks, satellite phase biases provided by the network and the ionospheric delays interpolated with the help of those of the network stations, the user can resolve the ambiguities and thus achieve high positioning precision. In this section, the observations of the worst-location users (see the stars in
Figure 5) are simulated with the noise, the temporally linked ZTDs and hardware biases as defined in
Table 4. Spatially correlated ionospheric signals are simulated for both the network stations and the user according to Equation (7). The interpolated ionospheric signals of the network stations are considered in the network corrections in addition to the processing noise.
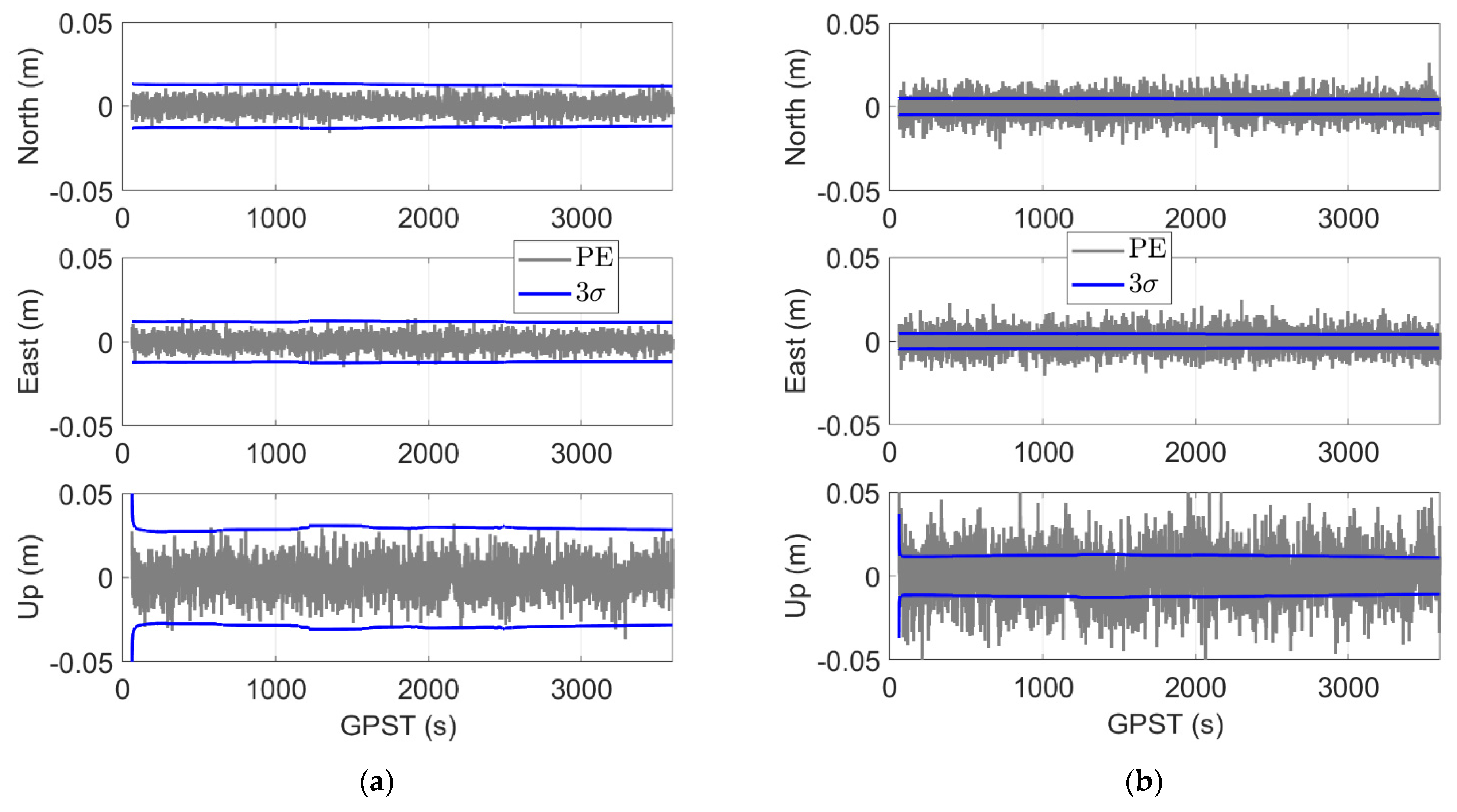
The blue lines in
Figure 6 show three times the formal standard deviations of the user positions for Network 1, and the gray lines illustrate the corresponding PEs. The user processing starts 60 s after the network processing to allow for convergence of the network corrections, i.e., at 00:01:00 in GPST on 26 June 2021. FAR is achieved almost in the entire test period. The two panels of
Figure 6 distinguish between two cases:
Option A: The V-C matrix of the network corrections, i.e., (see Equation (20)) is considered in the user processing.
Option B: The V-C matrix of the network corrections is not considered in the user processing.
From
Figure 6a for Option A and
Figure 6b for Option B it can be observed that applying the V-C matrix of the network corrections is not only helpful to reduce the PEs, but is also essential to obtain the correct formal standard deviations of the user positioning results. The blue lines in
Figure 6b are shown to be too optimistic to bound about 99.7% of the PEs, which is expected for Gaussian noise. As shown in
Table 5, while Option B could still deliver positioning results at an acceptable level, incorrect formal standard deviations of the user positioning results would directly lead to under-estimated PLs, which cannot bound the PEs under a given
as expected.
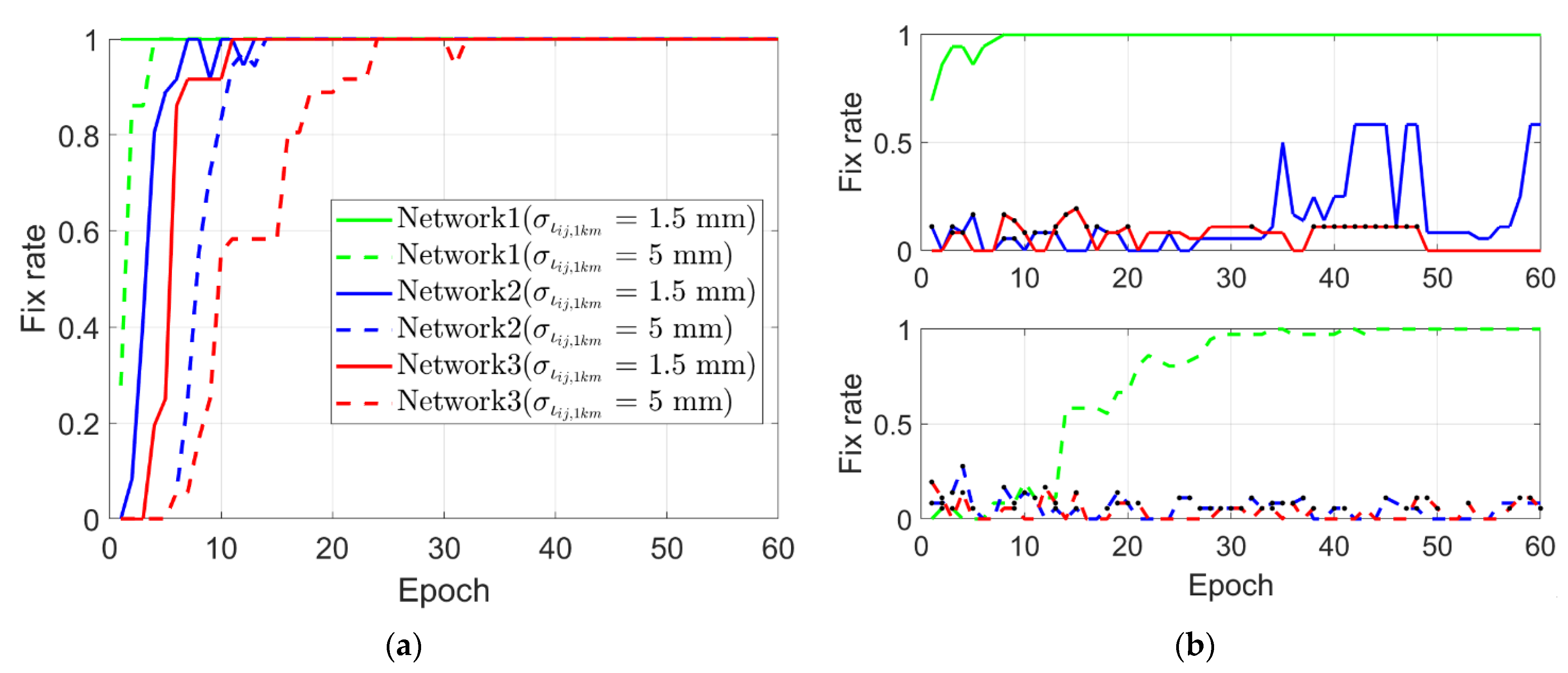
As discussed in the last subsection, the precision of the network corrections at the between-satellite level is mainly related to the user ionosphere interpolation. For different ionosphere activities and networks of different sizes, the user could experience different times to reach the FAR.
Figure 7a shows the ambiguity fix rate for the three networks assuming a
of 1.5 mm under nominal conditions, and 5 mm under more active ionosphere conditions. Compared to the instantaneous FAR for the small network under quiet ionospheric condition (see the solid green line in
Figure 7a, the FAR is delayed by tens of epochs for Network 3 with a
of 5 mm. When not considering the V-C matrix of the network corrections, for the purpose of visualization, the cases with a
of 1.5 and 5 mm are illustrated in the top and bottom panels of
Figure 7b, respectively. It can be seen that the FAR can still be achieved for the small network but over a longer period of time (see green lines), while for larger networks the results of the ambiguity resolution are shown to be bad. For Networks 2 (blue lines) and 3 (red lines), one does not only face a lower fix rate, but one also needs to deal with wrong fixing (see the black dots). Thus, correctly applying the V-C matrix of the network corrections is important for medium- to large-scale networks, or under active ionospheric conditions.
4.3. Horizontal Protection Level
For purpose of integrity at the user end, overbounding parameters are tested for a range of values as given in
Table 6:
The overbounding zenith-referenced standard deviations are of 5 mm and 0.5 m for the phase and code observations in the network processing, considering the fact that network stations are usually located at selected good measurement environments. One way to obtain the zenith-referenced overbounding parameters is given in [
4] as an example at the between-receiver level, using ambiguity-fixed double-difference residuals for short baselines at the beginning.
The overbounding standard deviation of the system noise for the temporally linked ZTDs is increased to 0.01 to adapt to fast weather changes. The value could vary with the known weather, e.g., set to a looser value on rainy days.
A range of overbounding standard deviations and biases are tested for the user observation noise/multipath, which are aimed to adapt to different complexities of the user multipath environment. They will be divided into different categories later in this section.
For the ionosphere activities, [
44] showed that the vertical overbounding standard deviation for the between-station ionospheric gradients are mostly below 4 mm/km in Switzerland over 15 years, with the maximum value of about 12 mm/km. Based on the modified single-layer model (SLM) [
45], the slant ionospheric delay at an elevation angle of 10 degrees could be about 2.37 times that in the vertical direction. As such, the
is tested from 5 to 20 mm covering most non-extreme ionospheric conditions, while the extreme cases are supposed to be detected and excluded in the FDE process.
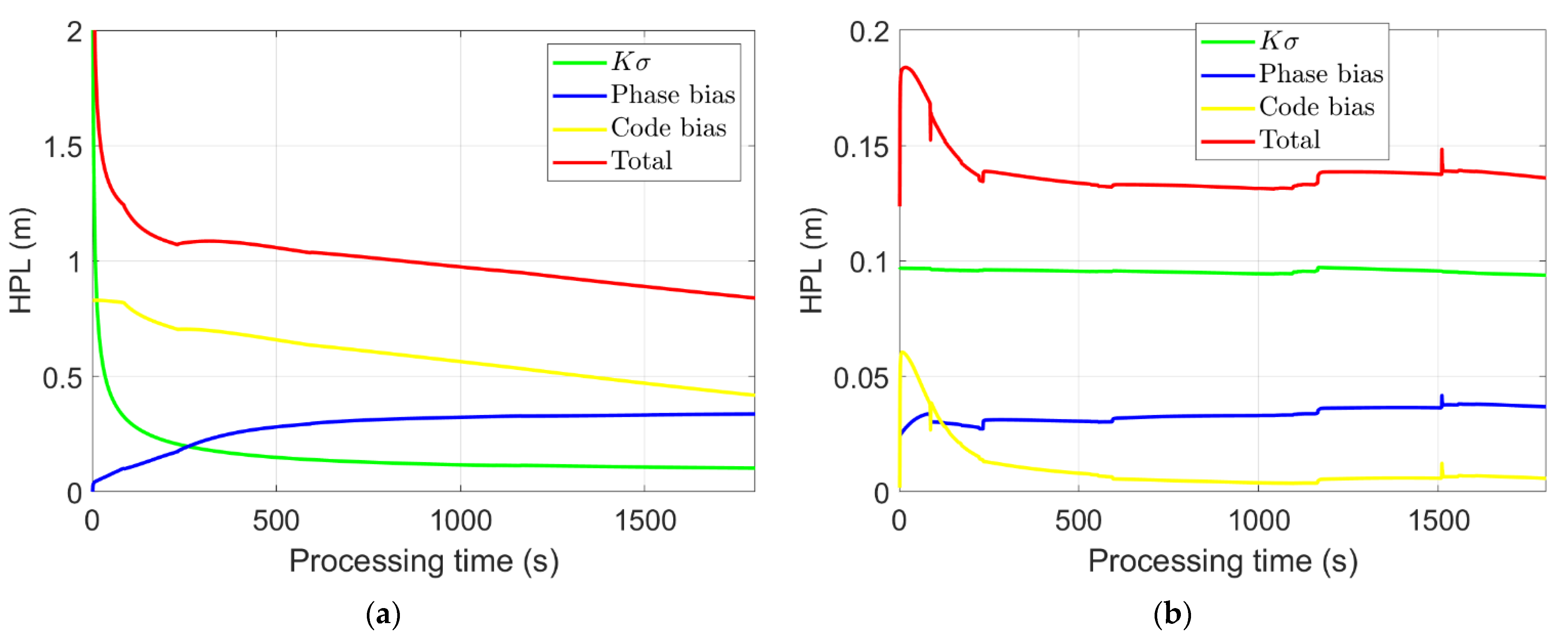
Figure 8 shows the contributions of different factors in computing the HPLs. In this example, assuming a nominal ionospheric condition, the worst-location user in Network 1 (see the star in
Figure 5a) is used with
set to 10 mm. The overbounding standard deviations of the zenith-referenced phase and code noise/multipath (
and
) are set to 0.01 m and 1 m, respectively, and the corresponding overbounding biases (
and
) are set to 0.02 cycles and 0.4 m, respectively. For ionosphere interpolation, the
for accuracy and continuity purpose is set to 1.5 mm. The
is set to
. The green lines (
) represent the HPL contribution of the noise at the network and the user side (see the term
in Equation (35)), while the blue and yellow lines denote the HPL contributions of the biases originated from the phase and code multipath (see the term
in Equation (35)). The red lines are the total HPLs.
From
Figure 8 it can be observed that the float HPL is generally at meter level in the first half-hour, with the highest contribution coming from the code bias. With the PAR enabled, the FAR is achieved in almost the entire test period. The ambiguity-fixed HPL is at the dm-level, for which the diverse noise contribution plays a dominant role in our example. When the PAR is enabled, the phase bias has a higher contribution than the code bias due to the higher weighting of phase observations than that of code.
Different multipath and ionosphere conditions may lead to different HPL results. Here we categorize the user multipath environments into four categories based on different overbounding standard deviations (
and
) and biases (
and
) as shown in
Table 7. Similarly, the ionosphere conditions are divided into four categories using different
. For
10 mm, the
for accuracy and continuity purpose is set to 1.5 mm. For larger
,
is set to 5 mm.
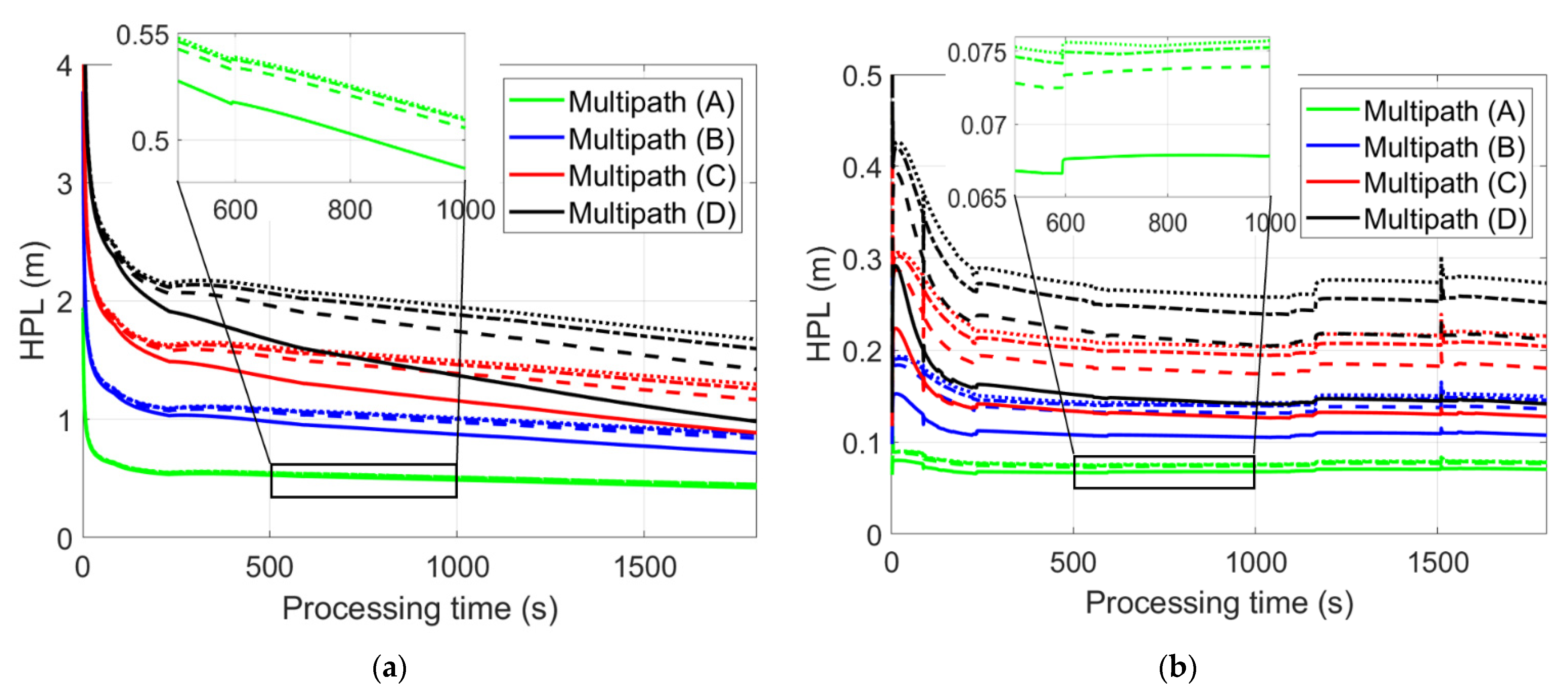
Figure 9 shows the HPLs of the worst-location user in Network 1 under different multipath environments and ionosphere conditions. The green lines of different types (multipath scenarios) are almost overwritten by each other and are zoomed in for better visualization for the processing time between 500 and 1000 s as examples. The solid, dashed, dashed-dotted and dotted lines represent the ionospheric conditions A, B, C and D, respectively. PAR is enabled in the right panel, and FAR is achieved most of the time. It can be observed that the multipath environments have significant influences on the HPLs, where increasing the complexity of the ionosphere condition further delays the convergence of the HPL, especially for complicated multipath environments.
Figure 9 also shows that fixing ambiguities is essential to reduce the HPL from meters to decimeters.
Decreasing the
would lead to a larger value in
(see Equation (35)) and thus increase the HPL. As shown in
Figure 10a, showing some examples for the multipath/ionosphere scenarios, the differences in
(see the different line styles explained in the figure caption) does not lead to significant differences in the ambiguity-float HPLs due to the dominant behavior of the code biases. Again, the green lines of different types (multipath/ionosphere scenarios) are almost overwritten by each other and are zoomed in for better visualization for the processing time between 500 and 1000 s as examples. In the ambiguity-fixed scenario (
Figure 10b), where the noise plays the dominant role, the differences caused by
become more apparent, especially for complicated multipath/ionosphere conditions (D) with weak observation model and large
.
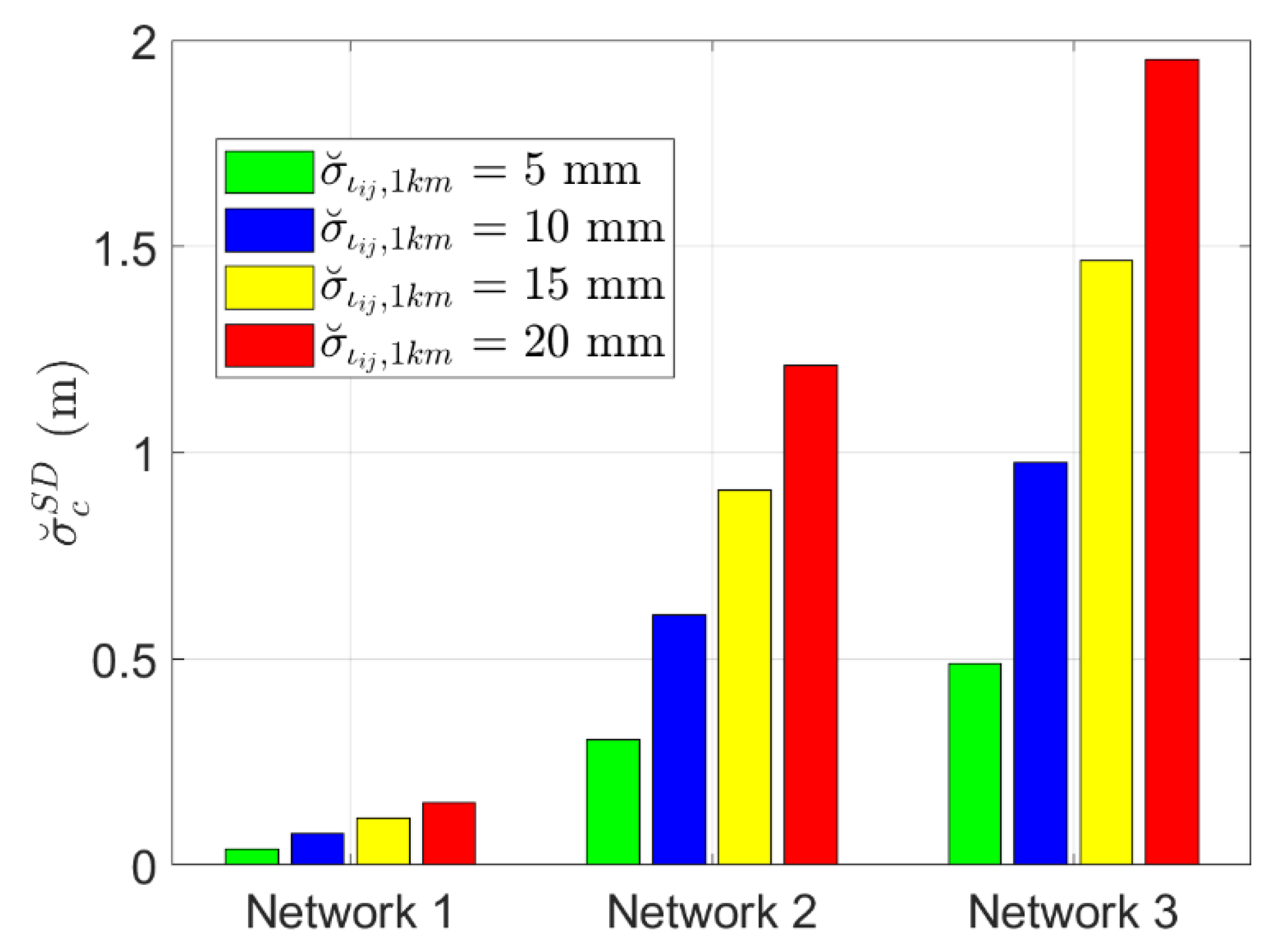
Under the same
, larger network size would lead to worse precision in the ionosphere interpolation.
Figure 11 shows the overbounding standard deviations of the between-satellite network corrections (
) for satellite pair C26 and C29 for the worst-location users at the end of a half-hour session. It can be observed that the network size significantly impacts the ionosphere interpolation, where the overbounding standard deviations delivered by the small-scaled Network 1 under active ionosphere conditions are lower than those of Network 2 under quiet conditions. Sorted with the
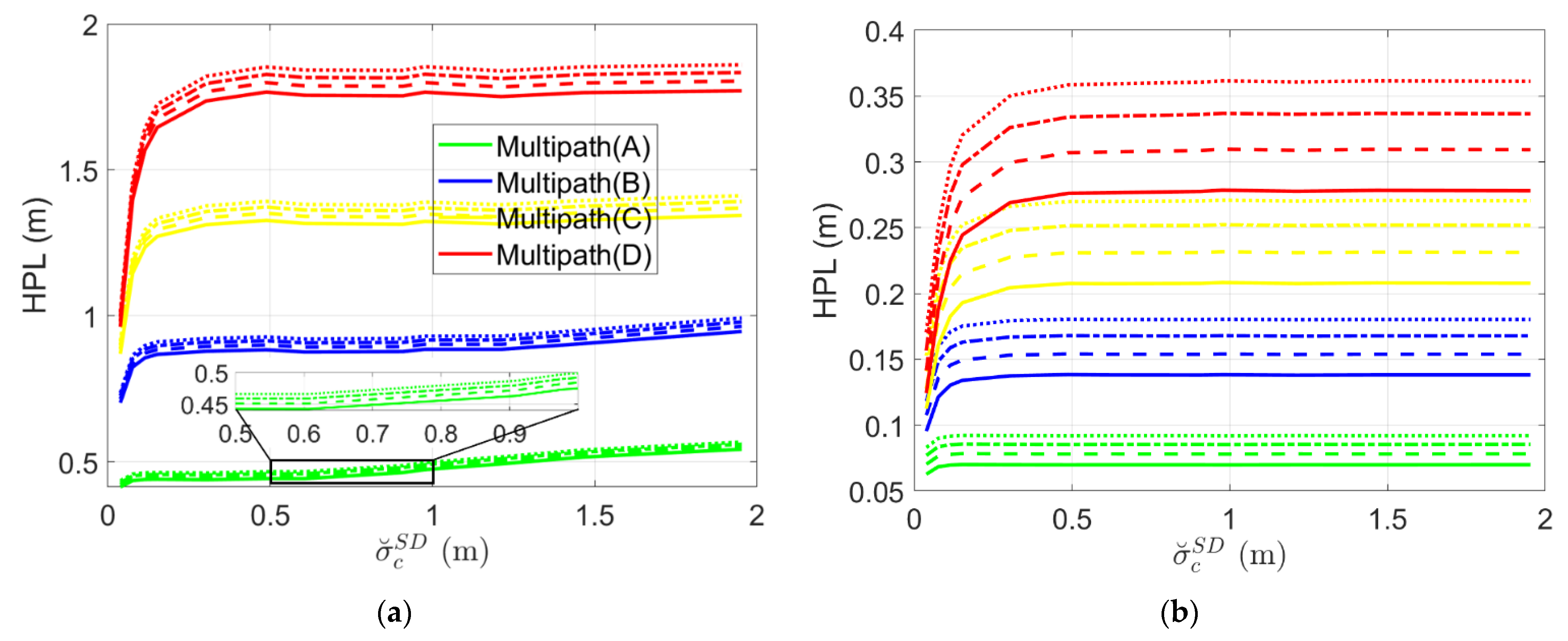
, the HPLs are plotted in
Figure 12 for different multipath scenarios and
. In the ambiguity-float case, i.e.,
Figure 12a, the green lines of different types (multipath scenarios) are almost overwritten by each other and are zoomed in for better visualization for
from 0.5 to 1 m as examples. It can be seen that sharp increase in the HPLs exists at small values of
, especially for complicated multipath environments. This indicates that in urban areas with high multipath, under nominal ionosphere condition, decreasing the network scale could be an efficient way in reducing the HPL. For all the tested multipath scenarios, the HPLs do not vary much when
exceeds 0.5 m. Further increasing
mainly disturbs other parameters rather than the horizontal coordinates. This is especially obvious for the ambiguity-fixed scenario, while the float ambiguities disturbed by
still have influences on the horizontal coordinates.
Table 8 and
Table 9 list the time-to-convergence (TOC) to 1.5 m for the ambiguity-float HPLs and to 0.3 m for the ambiguity-fixed HPLs. TOC is defined as the processing time needed to reach a certain threshold of the HPL and maintain it below this threshold for at least 60 s. From
Table 8 and
Table 9, it can be observed that under the same
the multipath environment generally has the largest influence on the TOC. With the increasing complexity of the multipath environment, the impact of the
on the HPLs increases. This shows that to quickly reach and thereafter maintain a low HPL in complicated multipath environments, it is essential to shrink the network size to keep a low
. In simple multipath environments (like Multipath scenario A), a small network scale would be helpful to accelerate the ambiguity resolution, as mentioned in
Section 4.2. With the ambiguities fixed, the HPLs do not appear to differ much for different
(see also
Figure 12b). In general, in nominal multipath environments (A/B), the ambiguity-float HPLs could converge to 1.5 m for Networks 1 and 2 under quiet to medium ionosphere activities (
mm) within or around 50 epochs for all the tested
. In the ambiguity-fixed case and under multipath scenarios A/B, the HPLs could converge to 0.3 m for Networks 1 and 2 even under active ionosphere conditions within ten epochs. Recall that for ambiguity resolution and ionosphere interpolation, the
for accuracy and continuity purposes is used, i.e., 1.5 mm for
mm, and 5 mm for 10 mm
mm (see
Table 7).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}