
Preliminary Analysis and Evaluation of BDS-3 RDSS Timing Performance

Abstract
:1. Introduction
2. Materials and Methods
2.1. One-Way Timing Principle
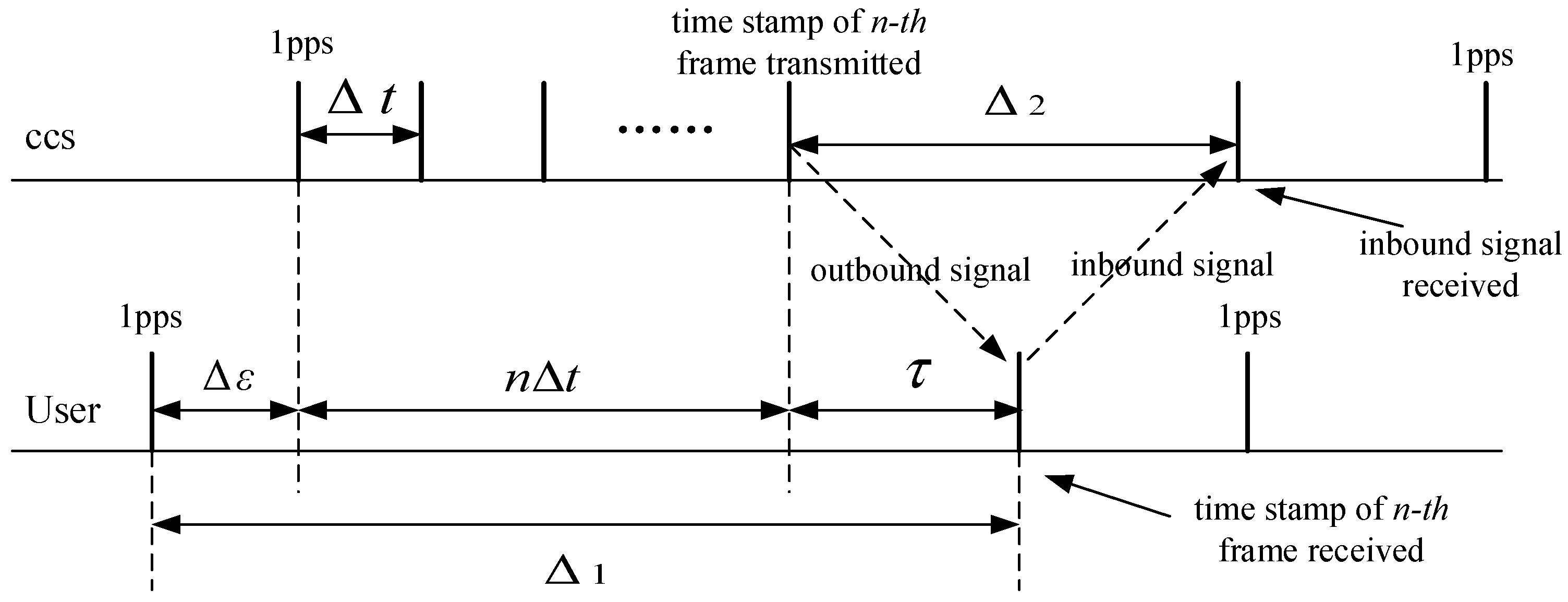
2.2. Two-Way Timing Principle
3. Results
3.1. Analysis and Evaluation Method
3.1.1. Timing Accuracy
3.1.2. Availability
3.1.3. Continuity
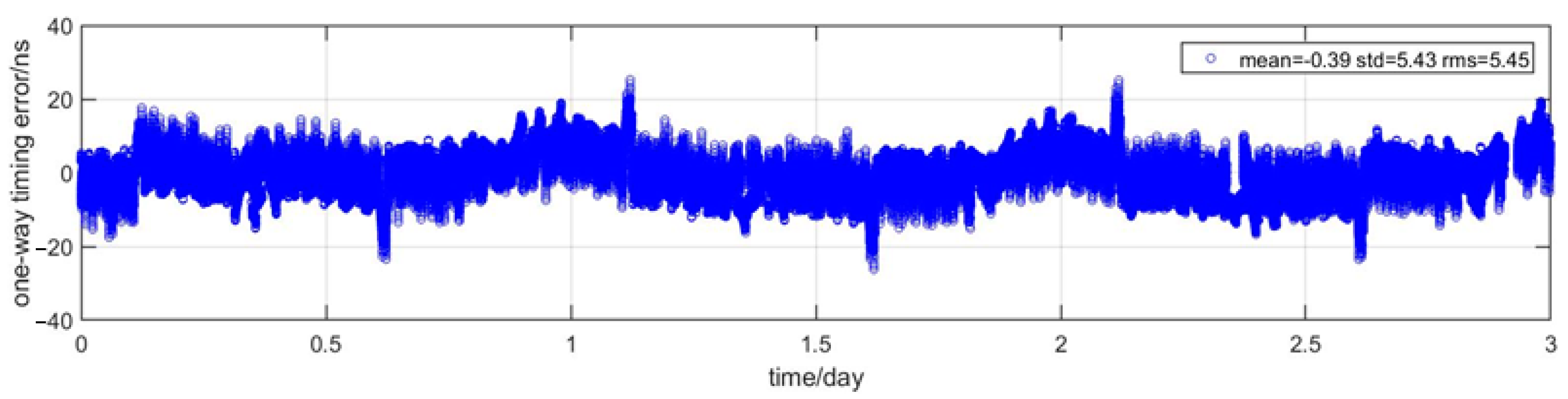
3.2. One-Way Timing Performance Analysis
3.2.1. Normal State
3.2.2. Orbit Maneuver State
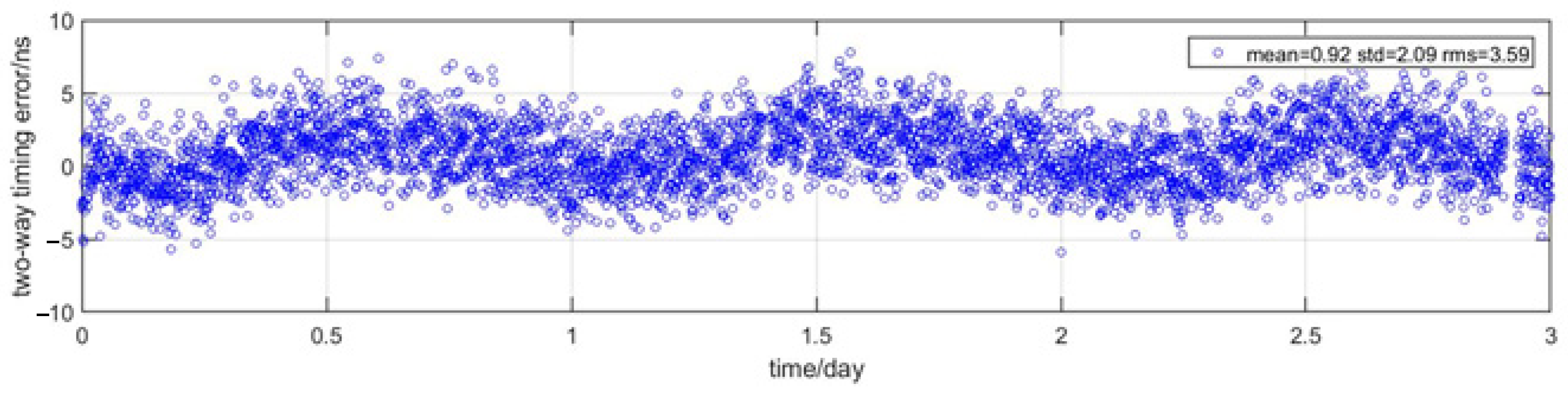
3.3. Two-Way Timing Performance Analysis
3.3.1. Normal State
3.3.2. Orbit Maneuver State
4. Preliminary Conclusions
- (1)
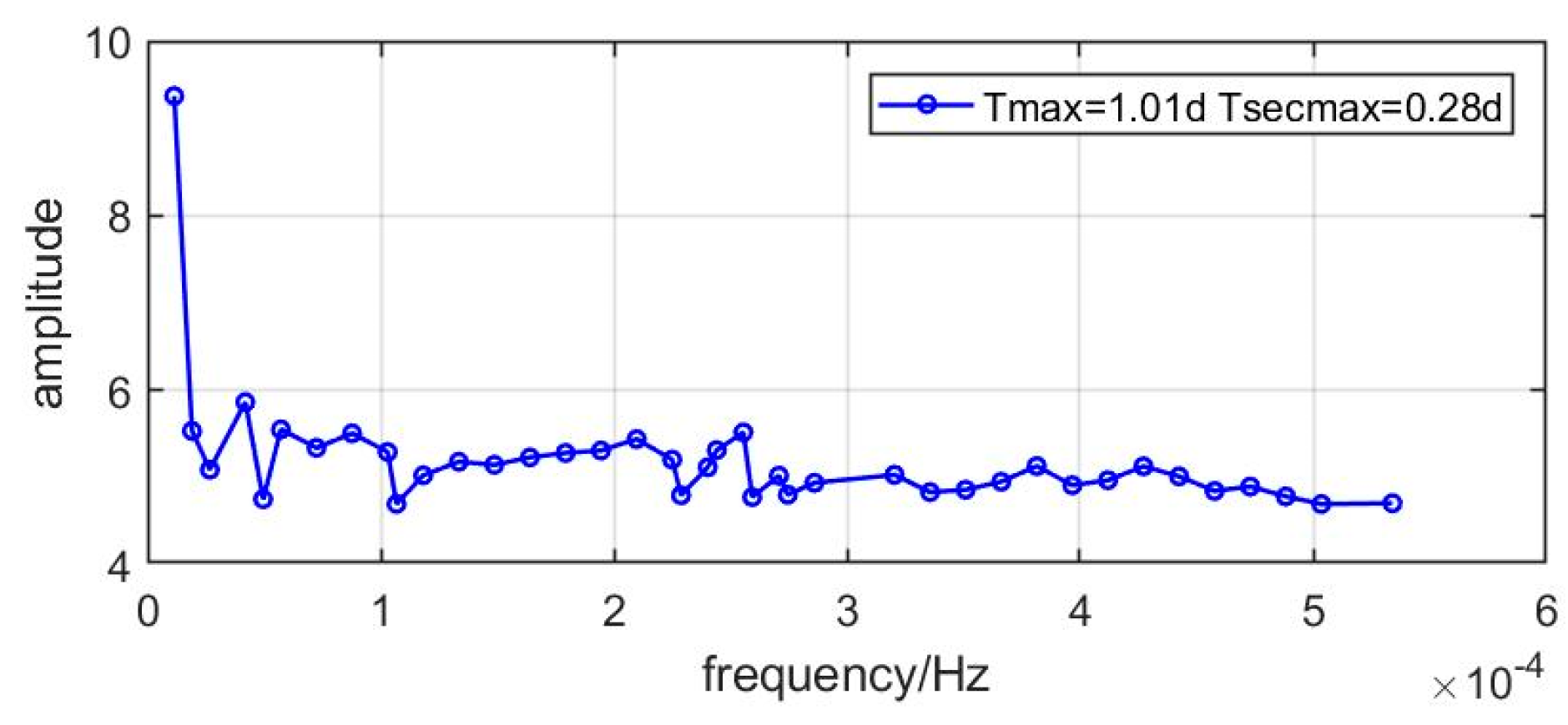
- Both one-way timing and two-way timing results are periodical, and the spectrum analysis shows that the period is 1.01 days.
- (2)
- The accuracy of one-way timing is better than 30 ns, and for two-way timing it is better than 8ns.
- (3)
- One-way timing is affected by satellite orbit, while two-way timing is not affected.
- (4)
- The availability and continuity of one-way timing in the normal state are 100%, which cannot be guaranteed in the orbit maneuver state.
- (5)
- The availability and continuity of two-way timing both in normal state and orbit maneuver state are 100%.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y. Progress, Contribution and Challenges of Compass/Beidou Satellite Navigation System. Acta Geod. Cartogr. Sin. 2010, 39, 1–6. [Google Scholar]
- Yang, Y.; Li, J.; Wang, A.B.; Xu, J.; He, H.; Guo, H.R.; Shen, J.F.; Dai, X. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci. China Earth Sci. 2014, 57, 144–152. [Google Scholar] [CrossRef]
- Tan, S. Innovative development and forecast of BeiDou system. Acta Geod. Cartogr. Sin. 2017, 46, 1284–1289. [Google Scholar]
- Tan, S. Theory and application of comprehensive RDSS position and report. Acta Geod. Cartogr. Sin. 2009, 38, 1–5. [Google Scholar]
- Zhao, J.; Ou, J.; Yuan, H. A new ambiguity resolution method using combined RNSS-RDSS of BeiDou. Acta Geod. Cartogr. Sin. 2016, 45, 404. [Google Scholar]
- China Satellite Navigation Office. The Application Service Architecture of BeiDou Navigation Satellite System; China Satellite Navigation Office: Beijing, China, 2019. [Google Scholar]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Open Service Performance Standard, version 3.0; China Satellite Navigation Office: Beijing, China, 2021.
- Tan, S. The Engineering of Satellite Navigation and Positioning, 2nd ed.; National Defend Industry Press: Beijing, China, 2010. [Google Scholar]
- Li, B.D.; Liu, L.; Ju, X.M. Geostationary Satellite Positioning; The People’s Liberation Army Press: Beijing, China, 1992. [Google Scholar]
- Li, B.D.; Liu, L.; Ju, X.M.; Shi, X.; Zhu, L.F. Accuracy analysis of satellite bidirectional timing. J. Time Freq. 2010, 33, 129–133. [Google Scholar] [CrossRef]
- Wang, D.; Guo, R.; Zhang, T.; Hu, X. Timing performance evaluation of Radio Determination Satellite Service (RDSS) for Beidou system. Acta Astronaut. 2019, 156, 125–133. [Google Scholar] [CrossRef]
- Guo, R.; Zhou, J.H.; Hu, X.G.; Liu, L.; Bo, T.; Li, X.J.; Shan, W. Precise orbit determination and rapid orbit recovery supported by time synchronization. Adv. Sp. Res. 2015, 55, 2889–2898. [Google Scholar] [CrossRef]
- Tang, C.; Hu, X.; Zhou, S.; Guo, R.; He, F.; Liu, L.; Zhu, L.; Li, X.; Wu, S.; Zhao, G. Improvement of orbit determination accuracy for Beidou Navigation Satellite System with Two-way Satellite Time Frequency Transfer. Adv. Space Res. 2016, 58, 1390–1400. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | 14 February 2021 | 15 February 2021 | 16 February 2021 |
|---|---|---|---|
| Availability | 100% | 100% | 100% |
| Continuity | 100% | 100% | 100% |
| Time | 14 February 2021 | 9 February 2021 | 10 February 2021 | |
|---|---|---|---|---|
| Normal | Maneuver | |||
| Timing accuracy | 5.52 | 23.21 | 5.49 | 5.46 |
| Time | 14 February 2021 | 15 February 2021 | 16 February 2021 |
|---|---|---|---|
| Availability | 100% | 100% | 100% |
| Continuity | 100% | 100% | 100% |
| Time | 8 February 2021 | 9 February 2021 | 10 February 2021 |
|---|---|---|---|
| Availability | 100% | 100% | 100% |
| Continuity | 100% | 100% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, R.; Wang, D.; Xing, N.; Liu, Z.; Zhang, T.; Ren, H.; Liu, S. Preliminary Analysis and Evaluation of BDS-3 RDSS Timing Performance. Remote Sens. 2022, 14, 352. https://doi.org/10.3390/rs14020352
Guo R, Wang D, Xing N, Liu Z, Zhang T, Ren H, Liu S. Preliminary Analysis and Evaluation of BDS-3 RDSS Timing Performance. Remote Sensing. 2022; 14(2):352. https://doi.org/10.3390/rs14020352
Chicago/Turabian StyleGuo, Rui, Dongxia Wang, Nan Xing, Zhijun Liu, Tianqiao Zhang, Hui Ren, and Shuai Liu. 2022. "Preliminary Analysis and Evaluation of BDS-3 RDSS Timing Performance" Remote Sensing 14, no. 2: 352. https://doi.org/10.3390/rs14020352