1. Introduction
The CubeSats have significant advantages, such as a small size, light mass, low cost, high flexibility, and short development cycle. They have been highly valued by the satellite application field [
1,
2,
3,
4]. The remote-sensing CubeSats are especially widely applied to navigation and positioning, agricultural survey, environmental protection, disaster prevention and mitigation, marine development, urbanization research, and other fields. Multiple CubeSats working together in orbit can achieve complex exploration missions that are difficult to be achieved by a single large satellite and can significantly reduce the costs and risks. Multiple nanosatellites in the form of clustering can implement space missions such as in-orbit formation flights and large payload platforms, effectively expanding the form and scope of payload applications. Thus, the multiple CubeSats working together to accomplish special tasks will become one of the future trends in space development [
5,
6,
7].
Because of the small envelope size and volume, the CubeSats are generally stored in a deployer and launched by a rocket [
8,
9,
10,
11,
12,
13]. The deployer plays an important role in storing and releasing CubeSats in orbit. Various countries have developed different deployers for CubeSats. Japan Space Agency developed a J-SSOD deployer with a compression spring. The J-SSOD deployer can store and release three CubeSats that have a size of 100 mm × 100 mm × 100 mm and a mass of 1 kg [
14]. The California Institute of Technology developed three generations of Poly Picosatellite Orbital Deployers (P-POD) [
15,
16,
17]. Each P-POD can store and release three CubeSats with a mass of less than 1 kg. More deployers are developed to carry different nanosatellites, such as the Single Picosatellite Launcher [
18], Generic Nanosatellite Bus [
19,
20,
21], and Tokyo Pico-satellite Orbital Deployer [
22]. However, these traditional deployers with compression springs have a small capacity due to their one-dimensional loading mode. Multiple independent deployers are used to increase the carrying capacity of the CubeSats, which still cannot meet the task requirements of large-capacity storage and synchronous release. In addition, the springs cannot adjust the separation speed of the CubeSat to meet the requirements of the complex release task.
Stacking CubeSats can effectively increase loading rates. The introduction of a multi-degree-of-freedom mechanism could lead to a complex system and a huge mass and reduce the loading rate. The electromagnetic actuators generate a high electromagnetic force by using the energized coils in the magnetic field [
23,
24,
25]. They have significant advantages of high frequency and repeatable actuation, high force density, and multi-directional force output, which are suitable for transferring the staked CubeSats to the release windows. In addition, different from the single actuation of the springs, the electromagnetic launcher can conveniently achieve repeatable action and thrust control [
26].
To release multiple stacked CubeSats in orbit, a new deployer with electromagnetic actuators is proposed to convey and eject the CubeSats one by one. The main contributions and innovations of the paper are the following three aspects: (1) Different from the traditional deployers with the compression springs, the proposed deployer can accommodate a number of CubeSats and significantly reduce launch costs. (2) The established electromagnetic force model and the simplified dynamic model can quickly obtain force and motion characteristics, respectively. (3) The electromagnetic conveying platform can effectively and reliably transfer the CubeSats, even under the constant external interference force. The launcher with high ejection force density achieves adjusting the separation speed of the CubeSat.
The rest of the paper is organized as follows:
Section 2 introduces the configuration and working principle of the CubeSat deployer, including the launcher and the conveying platform. In
Section 3, the models of ejection force, attractive force, and driving force are established by the equivalent magnetic circuit method. The simplified dynamic models are built based on the kinetic energy theorem to predict the speeds of transport and separation. In
Section 4, electromagnetic characteristics and CubeSat separation characteristics are analyzed. In
Section 5, we discuss the prototype that was developed to verify the theoretical models and to investigate electromagnetic characteristics and the performance of the CubeSat transport and ejection.
2. Structure and Working Principle
2.1. Subsection
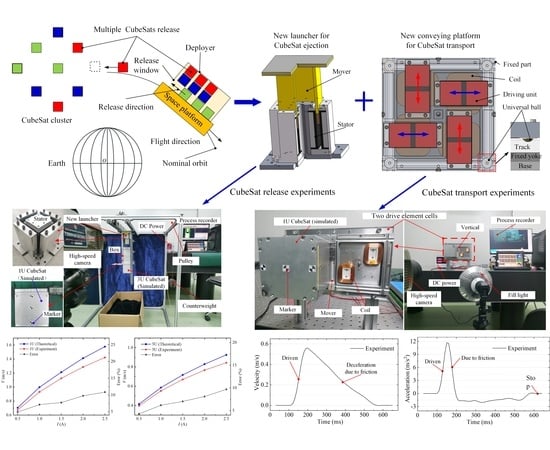
Figure 1 shows the release process of the stacked CubeSats in the deployer. Unlike a single CubeSat in a single deployer with a spring, the multiple CubeSats are stacked in the new deployer. The space platform with a new deployer is launched into a nominal orbit by a single rocket. The proposed CubeSat deployer mainly contains three parts: the pushing actuator, the electromagnetic conveying platform, and the ejection launcher; the pushing mechanism can push the stacked CubeSats to the transfer platform layer by layer; and the electromagnetic conveying platform can transfer the CubeSats to the desired launch windows through two degrees of freedom translation of catching trays. According to the expected separation velocity, the ejection launcher can produce electromagnetic force to put out the CubeSat at the launch windows. Due to the large number of CubeSats, the centroid of the deployer will also change in the release process, and this will also affect the motion and attitude of the rocket. Therefore, the CubeSat conveying route needs to consider the dynamic change of the deployer centroid.
The advantages and merits of the proposed CubeSat deployer are summarized as follows: (1) It has a larger storage capacity. Multiple CubeSats can be tightly stacked and conveyed to the launch window because of the unique electromagnetic conveying platform with adsorption force. (2) It has a higher loading rate. The electromagnetic conveying platform and lacunar are used to convey and release the CubeSats, avoiding a large amount of space occupied by complex mechanical mechanisms. The mass of the traditional deployer is larger than that of the accommodated CubeSats, while the mass of the proposed deployer is smaller than that of all accommodated CubeSats, because multiple CubeSats are stacked tightly and the loading rate is improved effectively. (3) It has multiple and repeatable releases. According to the different weights of the CubeSats, the electromagnetic launcher can adjust the separation speed.
2.2. Electromagnetic Conveying Platform
In the traditional single deployer, the ejection force can affect the motion and attitude of the rocket/space platform. The proposed deployer can reduce the influence of ejection force on the rocket through the reasonable arrangement of release window position of the electromagnetic conveying platform.
Figure 2 shows the structure of the electromagnetic conveying platform. There are four release windows and four launchers to ejection four CubeSats at the same time. The thrust directions are opposite to reduce the impact on the rocket. This is to reduce the impact of ejection force on the rocket by designing the release window positions and release direction.
The conveying platform mainly consists of identical drive element cells (fixed part) and catching trays (mover). Each drive element cell contains yokes, tracks, coils, and a wave bead screw in the center. The catching tray mainly includes universal balls and driving units. The structure of the mover element and the drive element cell is shown in
Figure 3. Each driving unit is composed of two permanent magnets (PMs).
The catching tray can be reliably attractive to the track because of the adsorption force between the PMs of the mover and the yokes of the drive element cells. The catching tray can be temporarily restrained by the wave bead screw directly above the drive element cell. The universal balls of the mover are on the track, which can guide the tray movement in the x or y direction once the coils in a magnetic field are energized. The four coils of the drive element cell are in the magnetic field between the PMs of the mover and the yoke of the fixed part. When the coils ① and ③ are energized, the electromagnetic force is produced on the mover and overcomes the resistance force of the wave bead screw. And the catching tray can be driven in the y direction until the mover is repositioned by the adjacent wave bed screw of the drive element cell. Similarly, When the coils ② and ④ are energized, the catching tray can move in the x direction.
The advantages and merits of the proposed electromagnetic conveying platform can be summarized as follows: (1) It has high transfer efficiency. The catching trays can move independently and do not interfere with each other. (2) It is had high flexibility and reliability. The catching tray can be reliably attached to the track and be driven at the same time. (3) It had good generality. The movement range of the catching tray can be expanded conveniently due to the modular design of the drive element cells.
2.3. Electromagnetic Launcher
The configuration of the electromagnetic launcher [
26] is shown in
Figure 4. It mainly consists of the pushing board, coils, and four ejection units. Due to the special configuration of yokes and PMs in the ejection unit, the double magnetic fluxes are formed and superposed in the airgap. The coil is in the airgap magnetic field produced by the PMs. When the coil is energized, the Ampere force is generated, and the pushing board pushes out the CubeSat. Thus, the separation speed of the CubeSat can be directly controlled by regulating the current value. Different from the conventional electromagnetic actuators, the double magnetic circuits of the proposed structure are produced and superimposed at the airgap. The special magnetic circuit structure helps to reduce magnetic saturation and increase the airgap magnetic field. Compared to the conventional one, the proposed electromagnetic launcher has the advantages of a smaller volume and larger thrust density, owing to the improved layout of the PMs and the yokes.
5. Experiment Investigation
The principal prototypes of the electromagnetic conveying platform and the launcher were developed, as shown in
Figure 13 and
Figure 14.
Figure 13 shows the mover and drive element cells of the conveying platform. In order to facilitate the test of the characteristics under different working conditions, only two adjacent drive element cells were adopted.
Figure 14 shows the stator and mover of the launcher. Firstly, the magnetic field distribution at key positions and force characteristics were tested for the conveying platform and the launcher. Then the motion characteristics of the conveying platform and the separation speed of the CubeSat were investigated via experiments.
5.1. Magnetic Field Leakage
Figure 15 shows the measurement of the magnetic field at the key position. The Gauss meter is used to record the magnetic flux density. The XYZ stage can change the relative position between the ejection unit and the probe. The XYZ stage and Z stage are applied to change the relative position of the driving unit and the probe.
The airgap center flux density of the ejection unit and the driving unit is shown in
Figure 16. The
finite element method (FEM) results are larger than the experimental results. The reason is that the key parameters in the FEM soft are not completely consistent with the actual values. The airgap flux density of the ejection unit is large and uniform due to unique double magnetic circuits. The average flux density at the airgap center of the ejection unit is about 0.424T. Because of the single-sided arrangement of the permanent magnet, the airgap magnetic density at the center of the driving unit is large and decreases to both sides. The average flux density at the airgap center of the driving unit is about 0.23T.
To evaluate the influence of magnetic field distribution on the CubeSat.
Figure 17 illustrates magnetic field leakage at the key position close to the CubeSat. Due to the magnetic field enhancement of the double magnetic circuit, the magnetic flux leakage of the launcher is larger than that of the conveying platform. The magnetic field decreases from the center of the launcher to the edge region, as shown in
Figure 17a. Due to the mutual superposition of the flux density leakage of the four ejection units, the magnetic field at the axis position of the launcher is the largest, at 20.17 mT. The flux density close to the edge position is the weakest, at the 5.2 mT.
Figure 17b shows that the central region of the mover is the weakest, at 0.56 mT. The flux density leakage at the center region of the driving unit is about 1.41 mT. The maximum leakage magnetic density of the mover is about 1.62 mT. The measurement results show that the magnetic flux density leakage of the launcher and the conveying platform is small and does not damage the normal operation of the CubeSats.
5.2. Electromagnetic Force Characteristics
Figure 18 shows the experimental measurements of the ejection force, attractive force, and driving force. In
Figure 18a, the Z stage can change the relative position of the mover and stator of the launcher in the vertical direction. The force meter is applied to record the thrust of the ejection force produced by energized coils. In
Figure 18b, the XZ stage is applied to adjust the relative position of the mover and the fixed part of the conveying platform. The force meter is fixed vertically to measure the attractive force and is mounted horizontally to obtain the driving force.
The measurement results of ejection force are shown in
Figure 19. The theoretical results agree well with the experimental results, meaning that the electromagnetic force model obtained from the equivalent magnetic circuit method is reliable. With the enhancement of the current for high ejection force, the error between the theoretical results and experimental results increases. The reason is that the armature field produced by energized current could affect the distribution of the original magnetic field generated by the PMs, especially under a higher current density. The mathematical model did not consider the influence of the armature reaction on the electromagnetic force. The FEM results also match the experimental results, indicating that the magnetic field characteristics results are feasible. Owing to the uniform distribution of the airgap magnetic field, the ejection force output is stable, and the fluctuation is small under a low current. Under a high current density, the theoretical results are larger than the experimental results. The reason is that the armature reaction is affected not only by the current density but also by the position of the coil in the airgap. The armature field interferes with the original permanent magnetic field acting on the coil, which is not taken into account in the mathematical model. The ejection force density and driving force density are achieved due to high magnetic field and magnetic saturation mitigation.
The test results of attractive force and driving force are shown in
Figure 20. The results show that the large attractive force between the mover and the fixed part of the conveying platform is achieved. However, there is an error between the FEM result and the experimental result. The reason is that some magnetic field leakage is regarded as airgap magnetic field by using FEM.
Figure 20b shows that the driving force gradually decreases due to the uneven magnetic field distribution at the end of the driving unit. The fluctuation of the driving force is about 20%. In the next section, the motion characteristics of the mover are investigated under the large attractive force and the fluctuating driving force.
5.3. Conveying Characteristics
The experiments of the transfer motion between the two adjacent drive element cells are shown in
Figure 21. To verify the dynamic model of the mover, the two drive elementary cells are fixed in the horizontal direction. Under this condition, the gravity of the CubeSat increases friction between the mover and the track. To highlight the attractive performance, the two drive elementary cells are mounted vertically. Under this condition, the gravity of the CubeSat is regarded as the interference force acting on the CubeSat. The mover with a simulated 1U CubeSat with a mass of 1 kg is attached to the track. The gravitational force acting on the CubeSat can be regarded as an external disturbing force. The whole transfer process of the CubeSat can be recorded by a high-speed camera.
Figure 22 shows the results of motion speed versus position in the horizontal direction. The theoretical results are larger than those of experiments because the friction coefficients in the dynamic model are not completely consistent with the practical value. The results show that the theoretical results effectively describe the motion trend of the mover, meaning that the dynamic model is reliable. Thus, the simplified dynamic model can quickly predict the transfer speed of the mover.
Figure 23 shows the experimental results of the motion position versus time. The distance between the two adjacent element cells is about 12 cm. It takes 0.409 s for the mover to transfer to the adjacent elementary cell. Therefore, the conveying platform achieves efficient transport.
Figure 24 shows the speed of the mover versus time. The mover transfers smoothly without obvious fluctuations. Under the current of 5A, the maximum speed of the mover is 0.56 m/s. The acceleration of the mover versus the time is shown in
Figure 25. The maximum acceleration is 11.7 m/s
2. Due to the uneven contact surface between the track and the universal balls, the acceleration fluctuates during the mover-deceleration process.
5.4. Ejection Experiment
The release speed of the CubeSats was tested by a gravity compensation experiment, as shown in
Figure 26. The three Cubes with a mass of 1 kg were selected to simulate the CubeSats with a mass of 1 kg or 3 kg. The two ends of the rope are respectively connected with the CubeSat and the counterweight. The CubeSat is released downward by the launcher to realize gravity compensation through the counterweight. The separation speeds of the CubeSats can be obtained by a high-speed camera. Because the deployer is mounted on the frame in the experiment, the separation speed of the CubeSat can be simplified as follows:
where
S is the action stroke of the launcher and
m is the mass of the simulated CubeSat.
The experiment results of separation speeds are shown in
Figure 27. The theoretical results are consistent with the experimental results, and the errors are less than 11%, thus indicating that the established model is credible. There are two main reasons for the error between the theoretical results and experiment results: (1) The higher the current, the higher the separation velocity, and the more energy loss due to contact collision during the CubeSat release. The collision causes the reduction of separation velocity, which is not taken into account by the simplified kinetic model. (2) Under a high current density, the armature reaction is more obvious. The armature magnetic field seriously weakens the original permanent magnetic field and causes the ejection force to be reduced. The electromagnetic force model does not take the influence of armature reaction into account. Under the current of 0.5 A–2.5 A, separation speeds of 1U and 3U CubeSats are 0.67 m/s–1.42 m/s and 0.4 m/s–0.85 m/s. Thus, the proposed launcher achieves a wider separation-speed adjustment range.
The proposed deployer is superior to the traditional one in terms of capacity, volume, mass, and ejection performance, owing to the high-performance electromagnetic actuators. However, objectively, the reliability of the proposed deployer is lower than that of the traditional one, because one of the CubeSats is stuck in the transport process, thus affecting the conveying routes of all CubeSats. The transport efficiency is reduced, and even the release fails. We will further improve the deployer’s reliability in future studies.
6. Conclusions
A new deployer with an electromagnetic transfer and launch was proposed to achieve multiple stacked CubeSats release in orbit. Different from the traditional ejection method of compression springs, two key technologies of electromagnetic transfer and ejection were mainly investigated in this study. We used the equivalent magnetic circuit method to quickly build the electromagnetic force models, including the attractive force, driving force, and ejection force. The simplified dynamics models of transfer and ejection were obtained through the kinetic energy theorem. The principal prototypes of the conveying platform and the launcher were developed to test magnetic field distribution, electromagnetic force, motion characteristics, and separation speed of the CubeSats. The main conclusions can be obtained as follows:
The results of the theoretical force models are consistent with the experimental results. The transfer velocity and separation speed obtained from the kinetic models agree with the experimental results. The developed mathematical models can be used to rapidly analyze electromagnetic force and motion characteristics in engineering.
Even under the constant external interference force, the mover of the electromagnetic conveying platform can still be reliably adsorbed on the track and realize fast transfer. The maximum movement speed of the mover is 0.56 m/s. The maximum drive acceleration is 11.7 m/s2. The high transfer efficiency is achieved owing to high driving force density.
High ejection force density is achieved by the proposed launcher with double magnetic circuits. The magnetic field leakage is small and does not interfere with the work of the CubeSat. The experimental results show the launcher can effectively adjust the separation velocity according to the mass of the CubeSat.
The proposed electromagnetic transfer and ejection technology are expected to be applied to the deployer for achieving larger-scale CubeSat release in orbit. We will reduce the separation angular velocity of the released CubeSats by optimizing the structural parameters of the deployer and further improve the reliability in future studies.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


























