
An Improved Spatiotemporal Weighted Mean Temperature Model over Europe Based on the Nonlinear Least Squares Estimation Method

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
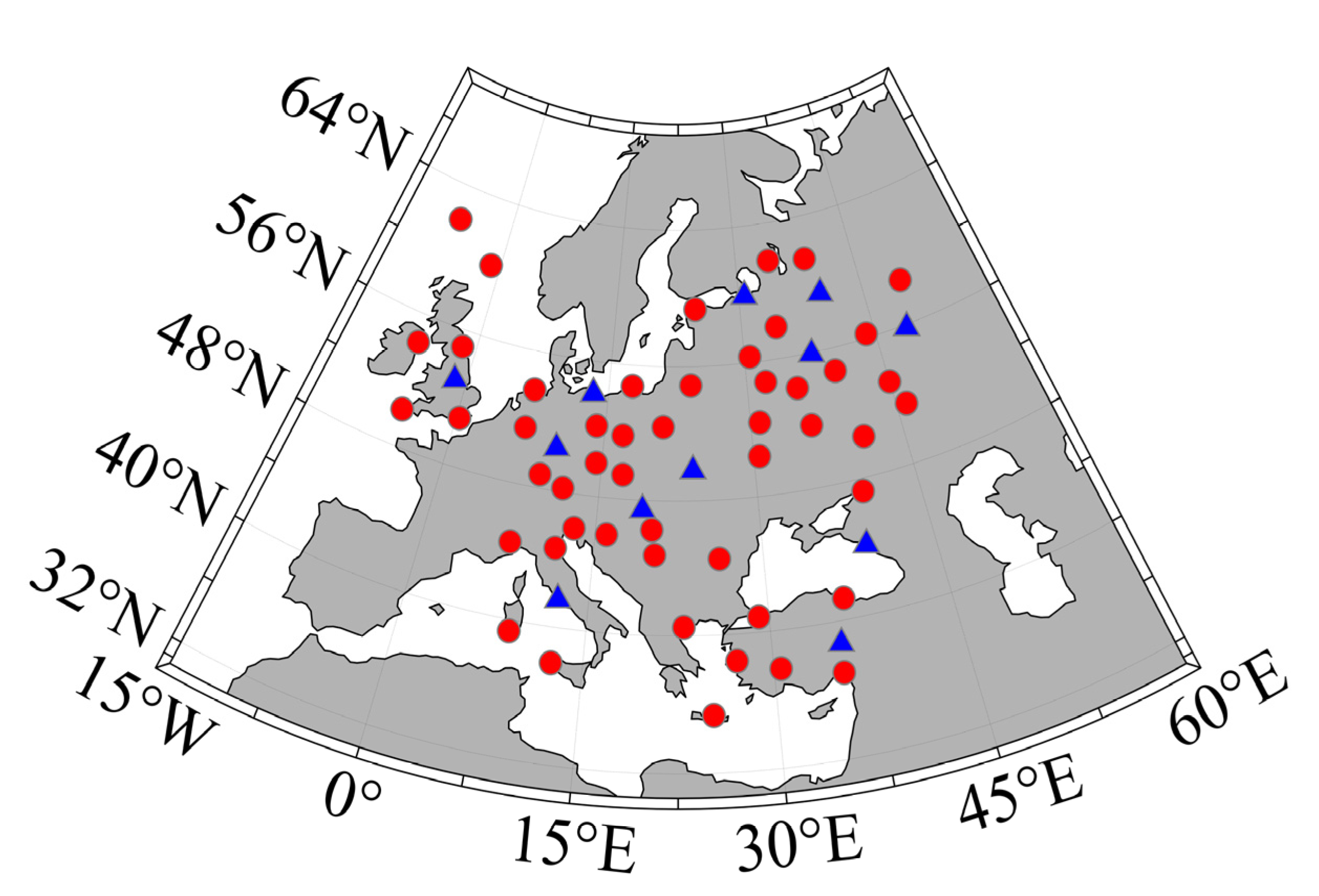
2.1. Study Area
2.2. Computing Tm Based on the Numerical Integration Method
2.3. Tm from the Bevis Model
2.4. Tm from the ETmPoly Model
2.5. Computing the Tm Based on the GPT2w Model
2.6. Construction of a New Tm Model (ETm) over Europe
2.7. Assessment Methods
3. Results
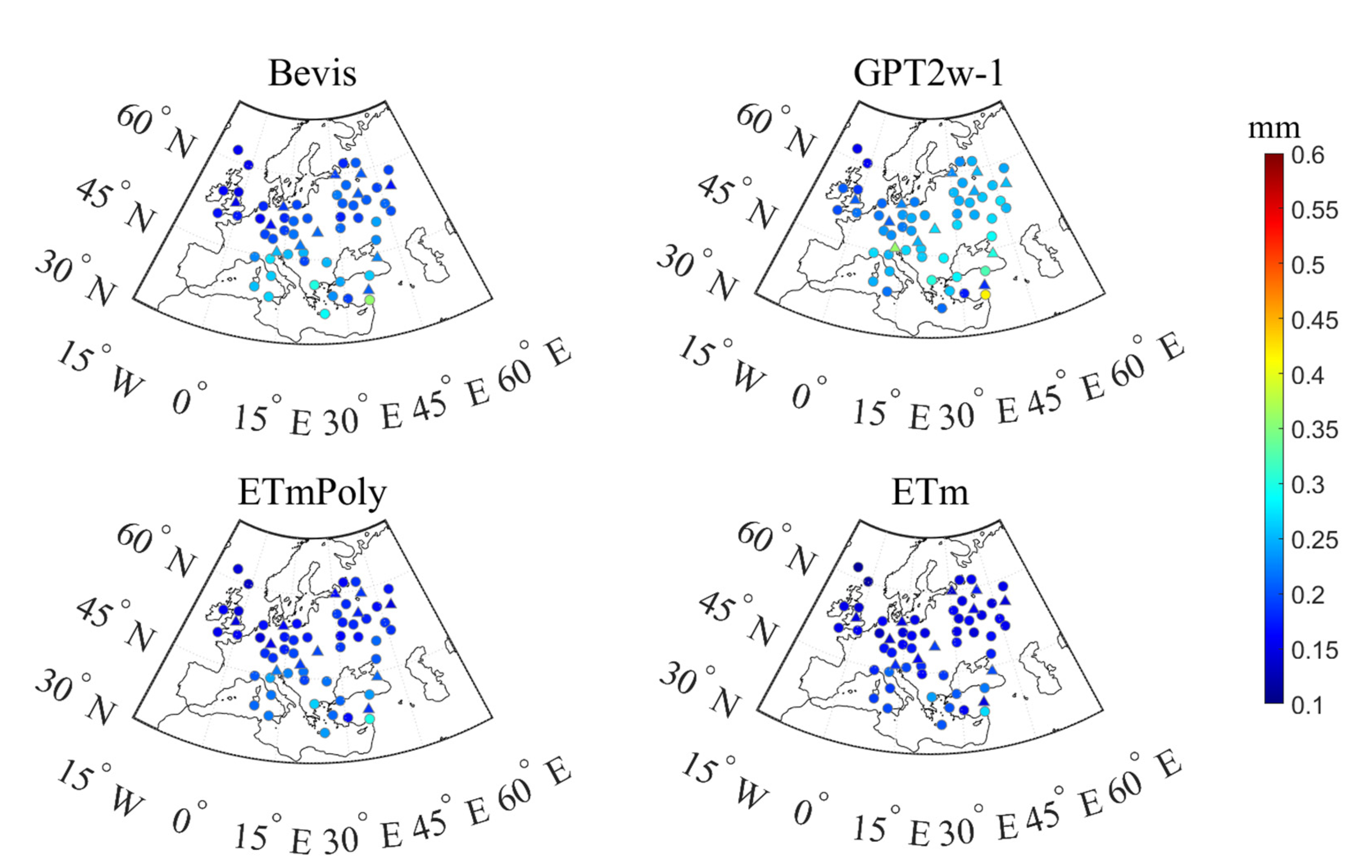
3.1. Performance Analysis of Different Tm Models at Modeling Stations in 2021
3.2. Performance Analysis of Different Tm Models at Non-modeling Stations in 2021
3.3. Impact of Tm on GNSS PWV Using Radiosonde Data in 2021
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bevis, M.; Businger, S.; Herring, A.T.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Ware, R.H. GPS Meteorology: Mapping Zenith Wet Delays onto Precipitable Water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, Y.; Ma, X.; Yao, W.; Yao, Y.; Li, X. An improved rainfall forecasting model based on GNSS observations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4891–4900. [Google Scholar] [CrossRef]
- Mendes, V.B.; Langley, R.B. Tropospheric zenith delay prediction accuracy for high-precision GPS positioning and navigation. Navigation 1999, 46, 25–34. [Google Scholar] [CrossRef]
- Ross, R.J.; Rosenfeld, S. Estimating mean weighted temperature of the atmosphere for Global Positioning System. J. Geophys. Res. 1997, 102, 21719–21730. [Google Scholar] [CrossRef] [Green Version]
- Suresh Raju, C.; Saha, K.; Thampi, B.V.; Parameswaran, K. Empirical model for mean temperature for Indian zone and estimation of precipitable water vapour from ground based GPS measurements. Ann. Geophys. 2007, 25, 1935–1948. [Google Scholar] [CrossRef] [Green Version]
- Sapucci, L.F. Evaluation of modeling water-vapour-weighted mean tropospheric temperature for GNSS-integrated water vapour estimates in Brazil. J. Appl. Meteorol. Climatol. 2014, 53, 715–730. [Google Scholar] [CrossRef]
- Zhang, B.; Guo, Z.; Lin, F.; Peng, C.; Jiang, D. Establishment and Accuracy Evaluation of Weighted Average Temperature Model in Guangxi. J. Xinyang Norm. Univ. (Nat. Sci. Ed.) 2022, 35, 85–91. [Google Scholar]
- Mekik, C.; Deniz, I. Modelling and validation of the weighted mean temperature for Turkey. Meteorol. Appl. 2017, 24, 92–100. [Google Scholar] [CrossRef]
- Emardson, T.R.; Derks, H. On the relation between the wet delay and the integrated precipitable water vapour in the european atmosphere. Meteorol. Appl. 2010, 7, 61–68. [Google Scholar] [CrossRef]
- Liu, J.; Yao, Y.; Sang, J. A new weighted mean temperature model in China. Adv. Space Res. 2018, 61, 402–412. [Google Scholar] [CrossRef]
- Zhang, F.; Barriot, J.-P.; Xu, G.; Yeh, T.-K. Metrology Assessment of the Accuracy of Precipitable Water Vapor Estimates from GPS Data Acquisition in Tropical Areas: The Tahiti Case. Remote Sens. 2018, 10, 758. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Zhu, S.; Yue, S. A globally applicable, season-specific model for estimating the weighted mean temperature of the atmosphere. J. Geod. 2012, 86, 1125–1135. [Google Scholar] [CrossRef]
- Lan, Z.; Zhang, B.; Geng, Y. Establishment and analysis of global gridded Tm–Ts relationship model. Geod. Geodyn. 2016, 7, 101–107. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Zhang, B.; Xu, C.; Chen, J. Analysis of the global Tm–Ts correlation and establishment of the latitude-related linear model. Chin. Sci. Bull. 2014, 59, 2340–2347. [Google Scholar] [CrossRef]
- Baldysz, Z.; Nykiel, G. Improved Empirical Coefficients for Estimating Water Vapor Weighted Mean Temperature over Europe for GNSS Applications. Remote Sens. 2019, 11, 1995. [Google Scholar]
- Li, L.; Li, Y.; He, Q.; Wang, X. Weighted Mean Temperature Modelling Using Regional Radiosonde Observations for the Yangtze River Delta Region in China. Remote Sens. 2022, 14, 1909. [Google Scholar] [CrossRef]
- Bhm, J.; Mller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef] [Green Version]
- Landskron, D.; Boehm, J. VMF3/GPT3: Refined discrete and empirical troposphere mapping functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef]
- Yao, Y.; Zhang, B.; Yue, S.; Xu, C.; Peng, W. Global empirical model for mapping zenith wet delays onto precipitable water. J. Geod. 2013, 87, 439–448. [Google Scholar]
- Yao, Y.; Xu, C.; Zhang, B.; Cao, N. GTm-III: A new global empirical model for mapping zenith wet delays onto precipitable water vapour. Geophys. J. Int. 2018, 197, 202–212. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Zhang, B.; Yao, Y. A Global Model for Estimating Tropospheric Delay and Weighted Mean Temperature Developed with Atmospheric Reanalysis Data from 1979 to 2017. Remote Sens. 2019, 11, 1893. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Jiang, W.; Liu, L.; Chen, H.; Ye, S. A new global grid model for the determination of atmospheric weighted mean temperature in GPS precipitable water vapor. J. Geod. 2019, 93, 159–176. [Google Scholar] [CrossRef]
- Huang, L.; Liu, L.; Chen, H.; Jiang, W. An improved atmospheric weighted mean temperature model and its impact on GNSS precipitable water vapor estimates for China. GPS Solut. 2019, 23, 51. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Fan, S.; Cheng, Y. Water vapor-weighted mean temperature and its impact on the determination of precipitable water vapor and its linear trend. J. Geophys. Res. Atmos. 2016, 121, 833–852. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Wu, S.; Zhang, K.; Chen, X.; Qiu, C.; Zhang, S.; Zhang, J.; Xie, M.; Li, L. Development of an Improved Model for Prediction of Short-Term Heavy Precipitation Based on GNSS-Derived PWV. Remote Sens. 2020, 12, 4101. [Google Scholar] [CrossRef]
- Guerova, G.; Jones, J.; Douša, J.; Dick, G.; de Haan, S.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef] [Green Version]
- Bolton, D. The Computation of Equivalent Potential Temperature. Mon. Weather. Rev. 1980, 108, 1046–1053. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.B.; Zhang, B.; Xu, C.Q.; Yan, F. Improved one/multi-parameter models that consider seasonal and geographic variations for estimating weighted mean temperature in ground-based GPS meteorology. J. Geod. 2014, 88, 273–282. [Google Scholar] [CrossRef]
- Levenberg, K. A method for the solution of certain problems in least squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Gill, P.R.; Murray, W.; Wright, M.H. The Levenberg-Marquardt Method; Academic Press: London, UK, 1981. [Google Scholar]
- Bates, D.M.; Watts, D.G. Nonlinear Regression and Its Application; Wiley: New York, NY, USA, 1988. [Google Scholar]
- Pujol, J. The solution of nonlinear inverse problems and the Levenberg-Marquardt method. Geophysics 2007, 72, W1–W16. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites. Use Artif. Satell. Geod. Geophys. Monogr. Serv. 1972, 15, 247–251. [Google Scholar]
- He, C.; Wu, S.; Wang, X.; Hu, A.; Zhang, K. A new voxel-based model for the determination of atmospheric weighted mean temperature in GPS atmospheric sounding. Atmos. Meas. Tech. 2017, 10, 2045–2060. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Yuan, L.; Chen, P.; Jiang, Z. Global grid-based Tm model with vertical adjustment for GNSS precipitable water retrieval. GPS Solut. 2020, 24, 73. [Google Scholar] [CrossRef]
- Yang, F.; Guo, J.; Meng, X.; Shi, J.; Zhang, D. Determination of Weighted Mean Temperature (Tm) Lapse Rate and Assessment of Its Impact on Tm Calculation. IEEE Access 2019, 7, 155028–155037. [Google Scholar] [CrossRef]
- Long, F.; Hu, W.; Dong, Y.; Wang, J. Neural Network-Based Models for Estimating Weighted Mean Temperature in China and Adjacent Areas. Atmosphere 2021, 12, 169. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Values |
|---|---|
| 0.0052 | |
| 5.5112 | |
| 0.0045 | |
| 2.3179 | |
| 9.6416 × 10−4 | |
| −0.6483 | |
| e | 126.0365 |
| 0.5239 | |
| 3.0680 | |
| −0.1568 |
| Model | Bias/K | RMS/K | ||||
|---|---|---|---|---|---|---|
| Max | Min | Mean | Max | Min | Mean | |
| Bevis | 2.42 | −2.58 | 0.83 | 5.29 | 2.61 | 3.64 |
| GPT2w-1 | 0.67 | −4.88 | −0.35 | 6.16 | 2.84 | 4.18 |
| ETmPoly | 1.88 | −1.64 | 0.66 | 4.42 | 2.49 | 3.22 |
| ETm | 1.63 | −1.74 | 0.06 | 3.97 | 2.21 | 2.85 |
| Model | Bias/K | RMS/K | ||||
|---|---|---|---|---|---|---|
| Maximum | Minimum | Mean | Maximum | Minimum | Mean | |
| Bevis | 2.14 | −1.09 | 0.97 | 4.89 | 2.54 | 3.61 |
| GPT2w-1 | 0.42 | −3.67 | −0.57 | 5.40 | 3.50 | 4.43 |
| ETmPoly | 1.53 | −0.66 | 0.67 | 4.38 | 2.46 | 3.21 |
| ETm | 0.61 | −0.81 | −0.07 | 3.54 | 2.45 | 2.87 |
| Model | mm | % | ||||
|---|---|---|---|---|---|---|
| Maximum | Minimum | Mean | Maximum | Minimum | Mean | |
| Bevis | 0.36 | 0.15 | 0.21 | 1.83% | 0.92% | 1.31% |
| GPT2w-1 | 0.42 | 0.16 | 0.25 | 2.13% | 0.99% | 1.53% |
| ETmPoly | 0.30 | 0.13 | 0.19 | 1.57% | 0.89% | 1.16% |
| ETm | 0.27 | 0.11 | 0.17 | 1.37% | 0.80% | 1.03% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Wang, Z.; Li, W.; Jiang, W.; Shen, Y.; Zhang, Y.; Zhang, S.; Tian, K. An Improved Spatiotemporal Weighted Mean Temperature Model over Europe Based on the Nonlinear Least Squares Estimation Method. Remote Sens. 2022, 14, 3609. https://doi.org/10.3390/rs14153609
Zhang B, Wang Z, Li W, Jiang W, Shen Y, Zhang Y, Zhang S, Tian K. An Improved Spatiotemporal Weighted Mean Temperature Model over Europe Based on the Nonlinear Least Squares Estimation Method. Remote Sensing. 2022; 14(15):3609. https://doi.org/10.3390/rs14153609
Chicago/Turabian StyleZhang, Bingbing, Zhengtao Wang, Wang Li, Wei Jiang, Yi Shen, Yan Zhang, Shike Zhang, and Kunjun Tian. 2022. "An Improved Spatiotemporal Weighted Mean Temperature Model over Europe Based on the Nonlinear Least Squares Estimation Method" Remote Sensing 14, no. 15: 3609. https://doi.org/10.3390/rs14153609