
Synchronous Assimilation of Tidal Current-Related Data Obtained Using Coastal Acoustic Tomography and High-Frequency Radar in the Xiangshan Bay, China

 , , ,
, , ,
Abstract
:1. Introduction
2. Data and Methods
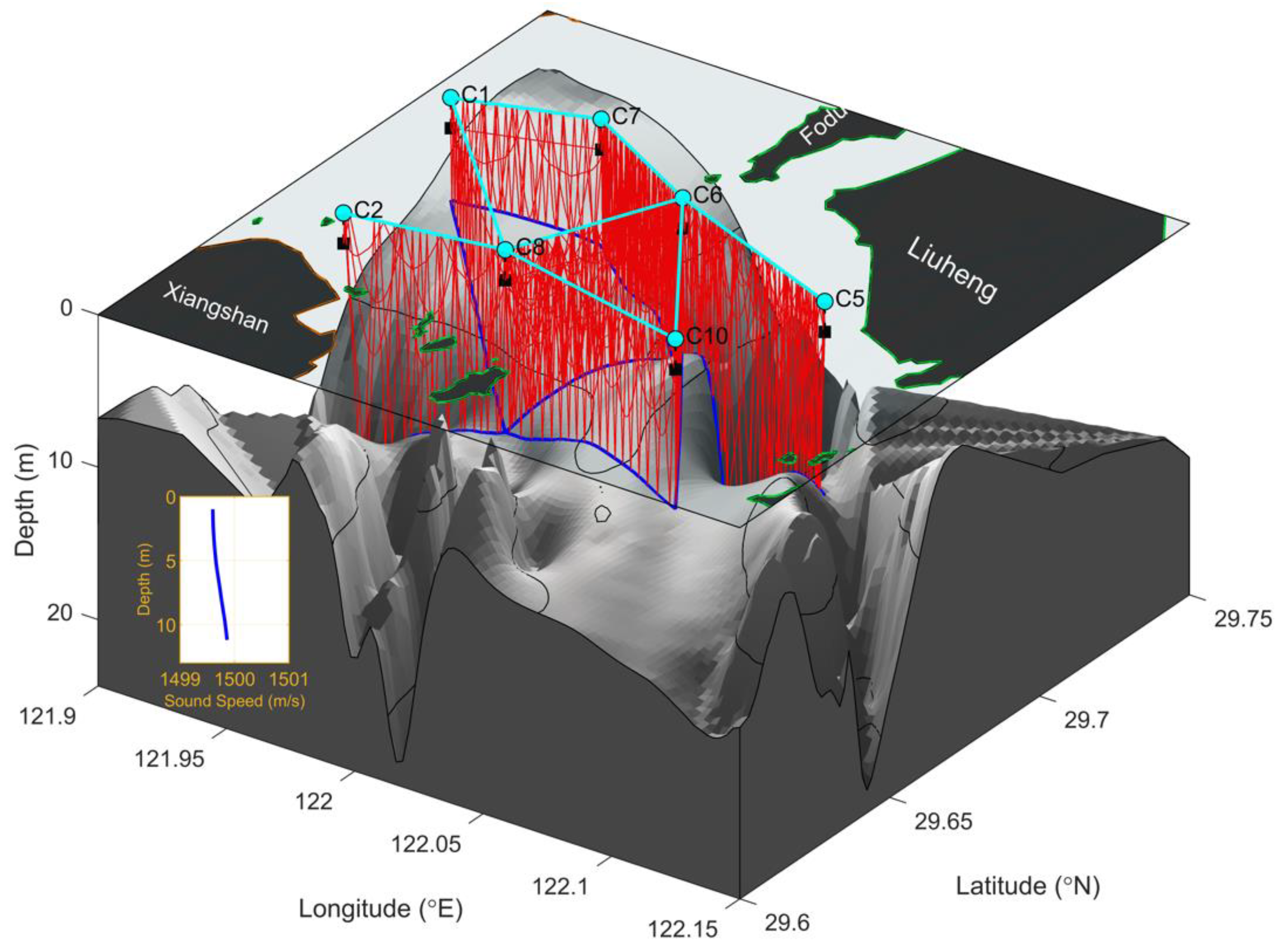
2.1. Field Observation
2.2. Numerical Model Sets
2.3. Assimilation Scheme of CAT and HFR Data
3. Model Performance
3.1. Elevation Verification
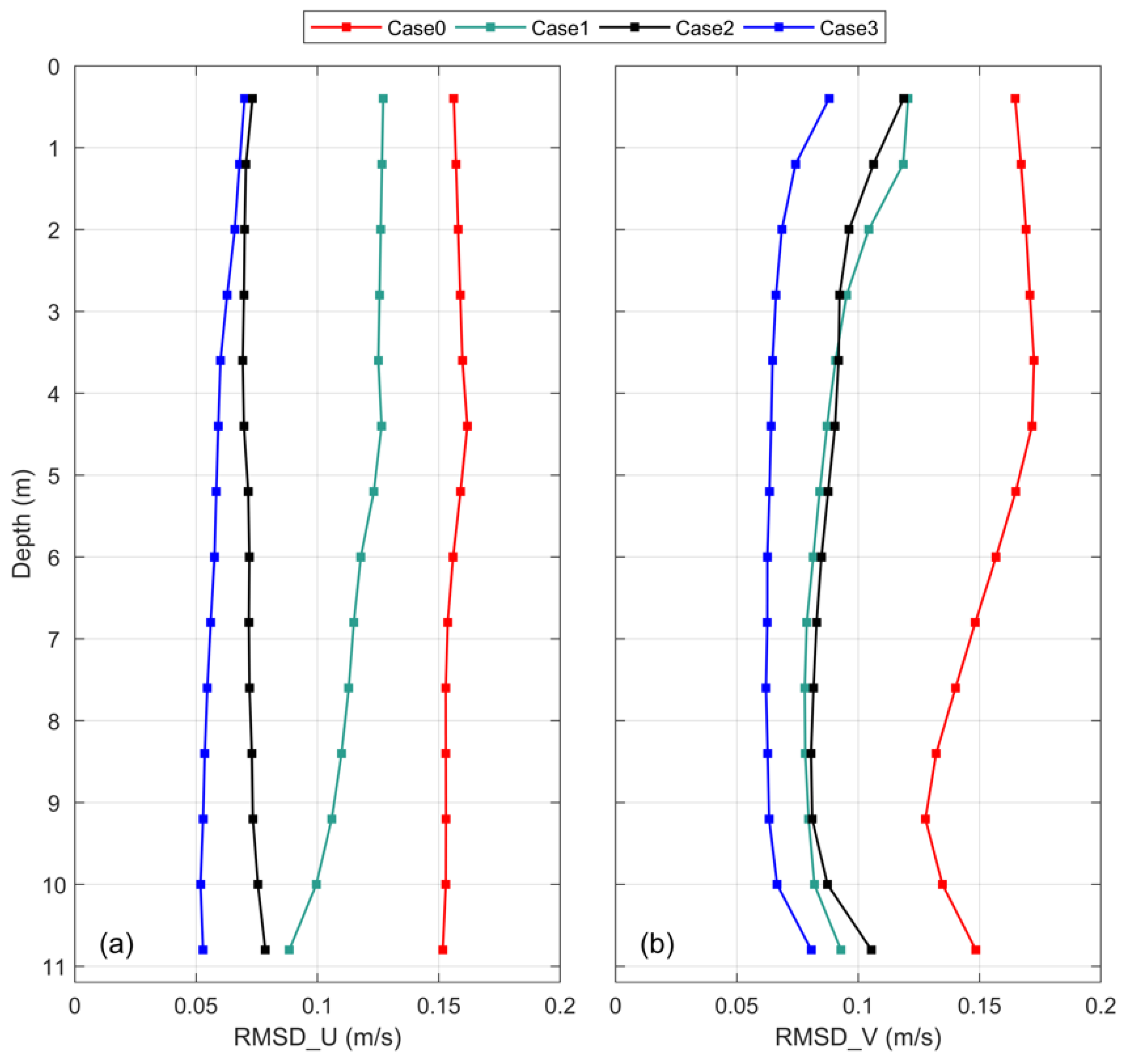
3.2. Comparison with Mooring ADCP Data
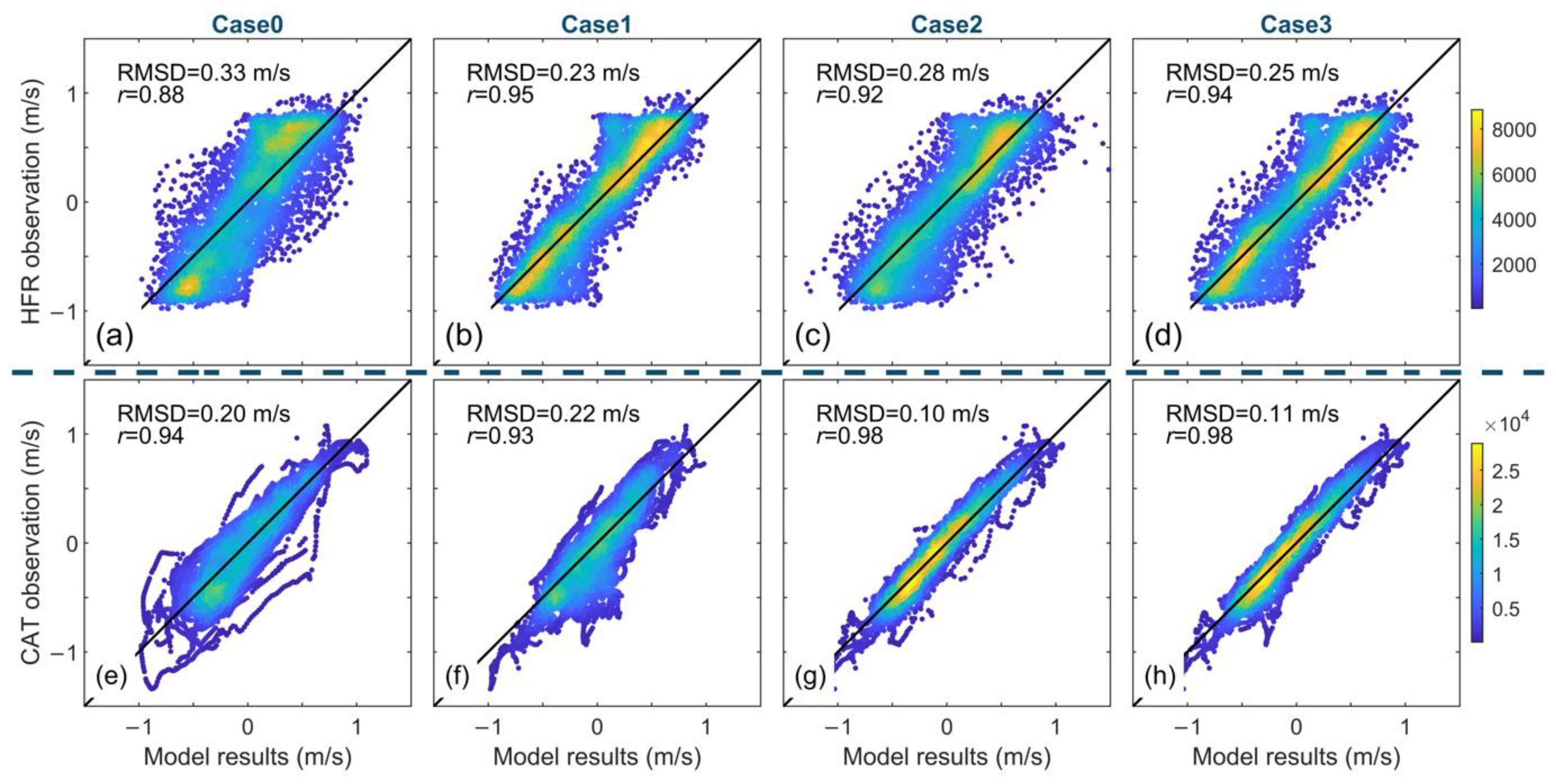
3.3. Comparison with CAT and HFR Data
4. Horizontal Tidal Currents
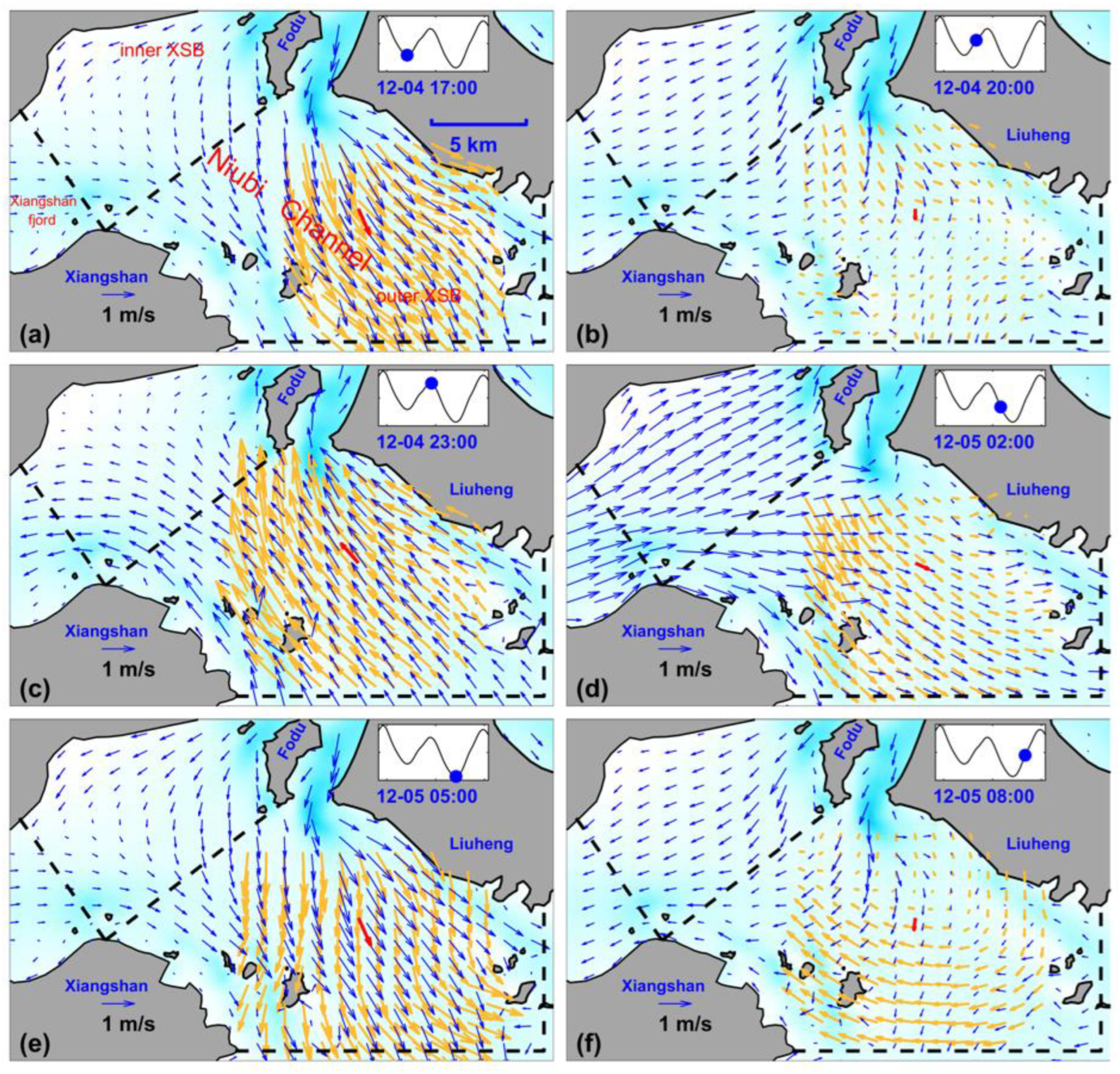
4.1. Transient Current Fields
4.2. Main Tidal Current Constituents and Residual Currents
5. Summary
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parker, B.B. (Ed.) The relative importance of the various nonlinear mechanisms in a wide range of tidal interactions (review). In Tidal Hydrodynamics; John Wiley: New York, NY, USA, 1991; pp. 237–268. [Google Scholar]
- Kaneko, A.; Zhu, X.-H.; Lin, J. Coastal Acoustic Tomography; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Yamoaka, H.; Kaneko, A.; Park, J.-H.; Zheng, H.; Gohda, N.; Takano, T.; Zhu, X.-H.; Takasugi, Y. Coastal acoustic tomography system and its field application. IEEE J. Ocean. Eng. 2002, 27, 283–295. [Google Scholar] [CrossRef]
- Zhu, X.-H.; Kaneko, A.; Wu, Q.; Zhang, C.; Taniguchi, N.; Gohda, N. Mapping tidal current structures in Zhitouyang Bay, China, using coastal acoustic tomography. IEEE J. Ocean. Eng. 2013, 38, 285–296. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, X.-H.; Zhu, Z.-N.; Liu, W.; Zhang, Z.; Fan, X.; Zhao, R.; Dong, M.; Wang, M. High-precision measurement of tidal current structures using coastal acoustic tomography. Estuar. Coast. Shelf Sci. 2017, 193, 12–24. [Google Scholar] [CrossRef]
- Yamaguchi, K.; Lin, J.; Kaneko, A.; Yayamoto, T.; Gohda, N.; Nguyen, H.-Q.; Zheng, H. A continuous mapping of tidal current structures in the Kanmon Strait. J. Oceanogr. 2005, 61, 283–294. [Google Scholar] [CrossRef]
- Zhu, X.-H.; Zhu, Z.-N.; Guo, X.; Ma, Y.-L.; Fan, X.; Dong, M.-H.; Zhang, C. Measurement of tidal and residual currents and volume transport through the Qiongzhou Strait using coastal acoustic tomography. Cont. Shelf Res. 2015, 108, 65–75. [Google Scholar] [CrossRef]
- Hanifa, A.D.; Syamsudin, F.; Zhang, C.-Z.; Mutsuda, H.; Chen, M.; Zhu, X.-H.; Kaneko, A.; Taniguchi, N.; Li, G.; Zhu, Z.-N.; et al. Tomographic measurement of tidal current and associated 3-h oscillation in Bali Strait. Estuarine. Coast. Shelf Sci. 2020, 236, 106655. [Google Scholar] [CrossRef]
- Chen, M.; Hanifa, A.D.; Taniguchi, N.; Mutsuda, H.; Zhu, X.; Zhu, Z.; Zhang, C.; Lin, J.; Kaneko, A. Coastal Acoustic Tomography of the Neko-Seto Channel with a Focus on the Generation of Nonlinear Tidal Currents—Revisiting the First Experiment. Remote Sens. 2022, 14, 1699. [Google Scholar] [CrossRef]
- Park, J.-H.; Kaneko, A. Computer simulation of the coastal acoustic tomography by a two-dimensional vortex model. J. Oceanogr. 2001, 57, 593–602. [Google Scholar] [CrossRef]
- Zhu, Z.-N.; Zhu, X.-H.; Guo, X. Coastal tomographic mapping of nonlinear tidal currents and residual currents. Cont. Shelf Res. 2017, 143, 219–227. [Google Scholar] [CrossRef]
- Chen, M.; Zhu, Z.-N.; Zhang, C.-Z.; Zhu, X.-H.; Wang, M.; Fan, X.; Zhao, R.; Lin, J.; Kaneko, A. Mapping current fields in a bay using a coast-fitting tomographic inversion. Sensors 2020, 20, 558. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Zhu, Z.-N.; Zhang, C.; Zhu, X.-H.; Zhang, Z.; Wang, M.; Zheng, H.; Zhang, X.; Chen, J.; He, Z.; et al. Mapping of tidal current and associated nonlinear currents in the Xiangshan Bay by coastal acoustic tomography. Ocean Dyn. 2021, 71, 811–821. [Google Scholar] [CrossRef]
- Park, J.-H.; Kaneko, A. Assimilation of coastal acoustic tomography data into a barotropic ocean model. Geophys. Res. Lett. 2000, 27, 3373–3376. [Google Scholar] [CrossRef]
- Lin, J.; Kaneko, A.; Gohda, N.; Yamaguchi, K. Accurate imaging and prediction of Kanmon Strait tidal current structures by the coastal acoustic tomography data. Geophys. Res. Lett. 2005, 32, L14607. [Google Scholar] [CrossRef]
- Zhu, Z.-N.; Zhu, X.-H.; Guo, X.; Fan, X.; Zhang, C. Assimilation of coastal acoustic tomography data using an unstructured triangular grid ocean model for water with complex coastlines and islands. J. Geophys. Res. Ocean. 2017, 122, 7013–7030. [Google Scholar] [CrossRef]
- Zhu, Z.-N.; Zhu, X.-H.; Zhang, C.; Chen, M.; Wang, M.; Dong, M.; Liu, W.; Zheng, H.; Kaneko, A. Dynamics of Tidal and Residual Currents Based on Coastal Acoustic Tomography Assimilated Data Obtained in Jiaozhou Bay, China. J. Geophys. Res. Ocean. 2021, 126, e2020JC017003. [Google Scholar] [CrossRef]
- Chen, M.; Kaneko, A.; Lin, J.; Zhang, C. Mapping of a typhoon-driven coastal upwelling by assimilating coastal acoustic tomography data. J. Geophys. Res. Ocean. 2017, 122, 7822–7837. [Google Scholar] [CrossRef]
- Paduan, J.; Graber, H. Introduction to High-Frequency Radar: Reality and Myth. Oceanography 1997, 10, 36–39. [Google Scholar] [CrossRef]
- Barrick, D.E.; Evans, M.W.; Weber, B.L. Ocean surface currents mapped by radar. Science 1977, 198, 138–144. [Google Scholar] [CrossRef]
- Chapman, R.D.; Shay, L.K.; Graber, H.C.; Edson, J.B.; Karachintsev, A.; Trump, C.L.; Ross, D.B. On the accuracy of HF radar surface current measurements: Intercomparisons with ship-based sensors. J. Geophys. Res. 1997, 102, 18737–18748. [Google Scholar] [CrossRef]
- Shen, Z.B.; Wu, X.B.; Fei, Y.J.; Xu, X.A.; Chen, X.F. Surface tidal currents in the open sea area to the east of the Zhoushan islands measured with high frequency surface wave radar. Acta Oceanol. Sin. 2013, 32, 5–10. [Google Scholar] [CrossRef]
- Bassin, C.J.; Washburn, L.; Brzezinski, M.; McPhee-Shaw, E. Sub-mesoscale coastal eddies observed by high frequency radar: A new mechanism for delivering nutrients to kelp forests in the Southern California Bight. Geophys. Res. Lett. 2005, 32, L12604. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Li, L.; Li, Y.; Guo, X. Seasonal variation of surface currents in the southwestern Taiwan Strait observed with HF radar. Chin. Sci. Bull. 2008, 53, 2385–2391. [Google Scholar] [CrossRef] [Green Version]
- Lai, Y.; Zhou, H.; Wen, B. Surface Current Characteristics in the Taiwan Strait Observed by High-Frequency Radars. IEEE J. Ocean. Eng. 2017, 42, 449–457. [Google Scholar] [CrossRef]
- Wang, L.; Pawlowicz, R.; Wu, X.; Yue, X. Wintertime variability of currents in the southwestern Taiwan Strait. J. Geophys. Res. Ocean. 2021, 126, e2020JC016586. [Google Scholar] [CrossRef]
- Breivik, Ø.; Sætra, Ø. Real time assimilation of HF radar currents into a coastal ocean model. J. Mar. Syst. 2001, 28, 161–182. [Google Scholar] [CrossRef] [Green Version]
- Oke, P.R.; Allen, J.S.; Miller, R.N.; Egbert, G.D.; Kosro, P.M. Assimilation of surface velocity data into a primitive equation coastal ocean model. J. Geophys. Res. 2002, 107, 3122. [Google Scholar] [CrossRef]
- Kurapov, A.L.; Egbert, G.D.; Allen, J.S.; Miller, R.N.; Erofeeva, S.Y.; Kosro, P.M. The M2 Internal Tide off Oregon: Inferences from Data Assimilation. J. Phys. Oceanogr. 2003, 33, 1733–1757. [Google Scholar] [CrossRef]
- Barth, A.; Alvera-Azcárate, A.; Weisberg, R.H. Assimilation of high-frequency radar currents in a nested model of the West Florida Shelf. J. Geophys. Res. 2008, 113, C08033. [Google Scholar] [CrossRef] [Green Version]
- Sperrevik, A.K.; Christensen, K.H.; Röhrs, J. Constraining energetic slope currents through assimilation of high-frequency radar observations. Ocean Sci. 2015, 11, 237–249. [Google Scholar] [CrossRef] [Green Version]
- Bradbury, M.C.; Conley, D.C. Using Artificial Neural Networks for the Estimation of Subsurface Tidal Currents from High-Frequency Radar Surface Current Measurements. Remote Sens. 2021, 13, 3896. [Google Scholar] [CrossRef]
- Gao, S.; Xie, Q.-C.; Feng, Y.-J. Fine-grained sediment transport and sorting by tidal exchange in Xiangshan Bay, Zhejiang, China. Estuar. Coast. Shelf Sci. 1990, 31, 397–409. [Google Scholar] [CrossRef]
- Cai, W.; Chen, G.; Ding, J. A discussion of the features of the tide and tidal current in the Xiangshan Harbour and their cause of formation. Mar. Sci. Bull. 1985, 4, 8–11. [Google Scholar]
- Dong, L.; Su, J. Tide response and wave distortion in Xiangshan Bay I. Observation and analysis. Acta Oceanol. Sin. 1999, 21, 1–10, (In Chinese with English Abstract). [Google Scholar]
- Dong, L.; Su, J. Tide response and wave distortion in Xiangshan Bay II, numerical modeling study in the Xiangshan Bay. Acta Oceanol. Sin. 1991, 21, 1–8. [Google Scholar]
- Dong, L.; Su, J.; Wong, L.-A. Tide response and tidal wave distortion in the Xiangshan Bay III, Numerical modeling study in an ideal rectangular bay. Acta Oceanol. Sin. 1999, 21, 1–6. [Google Scholar]
- Dong, L.; Su, J. Salinity distribution and mixing in Xiangshangang Bay I, Salinity distribution and circulation pattern. Oceanol. Limnol. Sin. 2000, 31, 151–158. [Google Scholar]
- Dong, L.; Su, J. Salinity distribution and mixing in Xiangshangang Bay II, Mixing analysis. Oceanol. Limnol. Sin. 2000, 31, 322–326, (In Chinese with English Abstract). [Google Scholar]
- Li, L.; Guan, W.; Hu, J.; Cheng, P.; Wang, X.H. Responses of water environment to tidal flat reduction in Xiangshan Bay: Part I hydrodynamics. Estuar. Coast. Shelf Sci. 2017, 206, 14–26. [Google Scholar] [CrossRef]
- Xu, P.; Mao, X.; Jiang, W. Mapping tidal residual circulations in the outer Xiangshan Bay using a numerical model. J. Mar. Syst. 2016, 154, 181–191. [Google Scholar] [CrossRef]
- Xu, P.; Mao, X.; Jiang, W.; Zhou, L. A numerical study of tidal asymmetry: Preferable asymmetry of nonlinear mechanisms in Xiangshan Bay, East China Sea. J. Ocean Univ. China 2014, 13, 733–741. [Google Scholar] [CrossRef]
- He, T.; Guan, W.; Cao, Z.; Bao, M.; Li, S.; Li, Y. High-Frequency ground wave radar observation and analysis of tidal current distribution in the Niubi Channel of Xiangshangang Bay. J. Mar. Sci. 2021, 39, 109–122, (In Chinese with English Abstract). [Google Scholar]
- Li, L.; Guan, W.; He, Z.; Yao, Y.; Xia, Y. Responses of water environment to tidal flat reduction in Xiangshan Bay: Part II locally re-suspended sediment dynamics. Estuar. Coast. Shelf Sci. 2017, 198, 114–127. [Google Scholar] [CrossRef]
- Wen, B.; Li, Z.; Zhou, H.; Shi, Z.; Wu, S.; Wang, X.; Yang, H.; Li, S. Sea surface currents detection at the eastern China Sea by HF ground wave radar OSMAR-S. Acta Electron. Sin. 2009, 37, 2778–2782. [Google Scholar]
- A Teledyne RD Instruments Marine Measurements Datasheet. Available online: https://seatronics-group.com/wp-content/uploads/2020/03/Teledyne%20RDI%20Workhorse%20Sentinel%20ADCP%20-%20Data%20Sheet.pdf (accessed on 16 May 2022).
- Aquadopp Profiler 1 MHz. Available online: https://www.nortekgroup.com/products/aquadopp-profiler-1-mhz (accessed on 25 March 2022).
- Chen, C.; Liu, H.; Beardsley, R.C. An unstructured grid, finite-volume, three-dimensional, primitive equations ocean model: Application to coastal ocean and estuaries. J. Atmos. Ocean. Technol. 2003, 20, 159–186. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble kalman filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Lai, Y.; Zhou, H.; Yang, J.; Zeng, Y.; Wen, B. Submesoscale Eddies in the Taiwan Strait Observed by High-Frequency Radars: Detection Algorithms and Eddy Properties. J. Atmos. Oceanic Technol. 2017, 34, 939–953. [Google Scholar] [CrossRef]
- Pawlowicz, R.; Beardsley, B.; Lentz, S. Classical tidal harmonic analysis including error estimates in MATLAB using T_TIDE. Comput. Geosci. 2002, 28, 929–937. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameters | Set Values |
|---|---|
| External time step | 0.4 s |
| Internal time step | 4.0 s |
| Bottom friction coefficient | 0.0003 |
| Horizontal mixing type | Smagorinsky’s parameterization method |
| Vertical eddy viscosity | M-Y 2.5 turbulent closure |
| Model Cases | Assimilation Data |
|---|---|
| Case0 | Pure model without assimilation |
| Case1 | HFR data |
| Case2 | CAT data |
| Case3 | CAT and HFR data |
| Model Cases | RMSDs (m/s) | Relative Errors (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| Surface Layer | Vertical Mean | Surface Layer | Vertical Mean | |||||
| U | V | U | V | U | V | U | V | |
| Case0 | 0.16 | 0.15 | 0.16 | 0.16 | 19.8 | 16.5 | 22.3 | 18.0 |
| Case1 | 0.13 | 0.11 | 0.11 | 0.09 | 16.8 | 12.5 | 16.4 | 9.7 |
| Case2 | 0.08 | 0.11 | 0.07 | 0.09 | 10.0 | 11.9 | 9.5 | 10.0 |
| Case3 | 0.07 | 0.10 | 0.05 | 0.07 | 9.2 | 11.4 | 7.8 | 7.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.-N.; Zhu, X.-H.; Guan, W.; Zhang, C.; Chen, M.; Liu, Z.-J.; Wang, M.; Zheng, H.; Chen, J.; Dai, L.; et al. Synchronous Assimilation of Tidal Current-Related Data Obtained Using Coastal Acoustic Tomography and High-Frequency Radar in the Xiangshan Bay, China. Remote Sens. 2022, 14, 3235. https://doi.org/10.3390/rs14133235
Zhu Z-N, Zhu X-H, Guan W, Zhang C, Chen M, Liu Z-J, Wang M, Zheng H, Chen J, Dai L, et al. Synchronous Assimilation of Tidal Current-Related Data Obtained Using Coastal Acoustic Tomography and High-Frequency Radar in the Xiangshan Bay, China. Remote Sensing. 2022; 14(13):3235. https://doi.org/10.3390/rs14133235
Chicago/Turabian StyleZhu, Ze-Nan, Xiao-Hua Zhu, Weibing Guan, Chuanzheng Zhang, Minmo Chen, Zhao-Jun Liu, Min Wang, Hua Zheng, Juntian Chen, Longhao Dai, and et al. 2022. "Synchronous Assimilation of Tidal Current-Related Data Obtained Using Coastal Acoustic Tomography and High-Frequency Radar in the Xiangshan Bay, China" Remote Sensing 14, no. 13: 3235. https://doi.org/10.3390/rs14133235