
Classification of Mediterranean Shrub Species from UAV Point Clouds

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
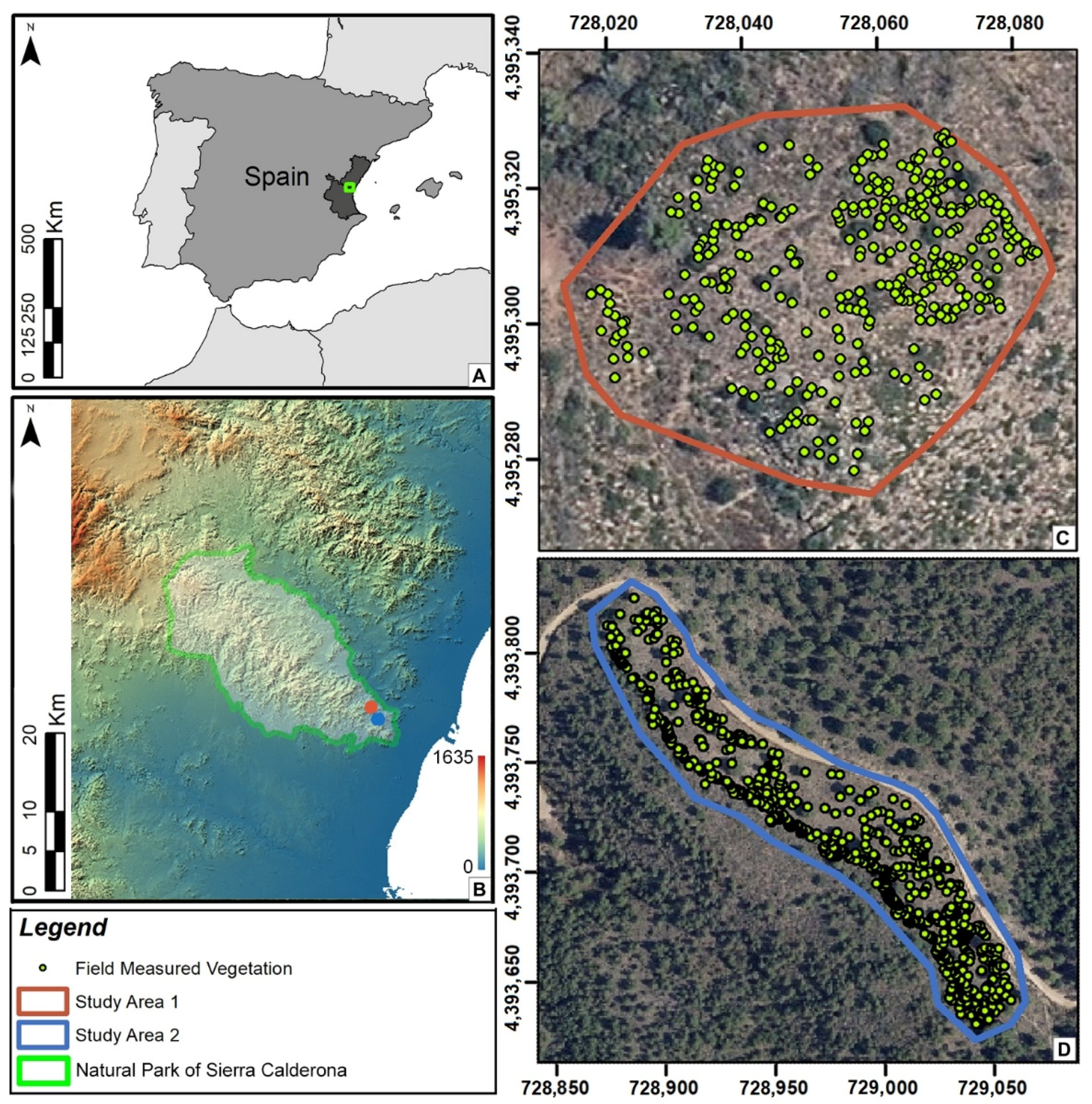
2.1. Study Sites
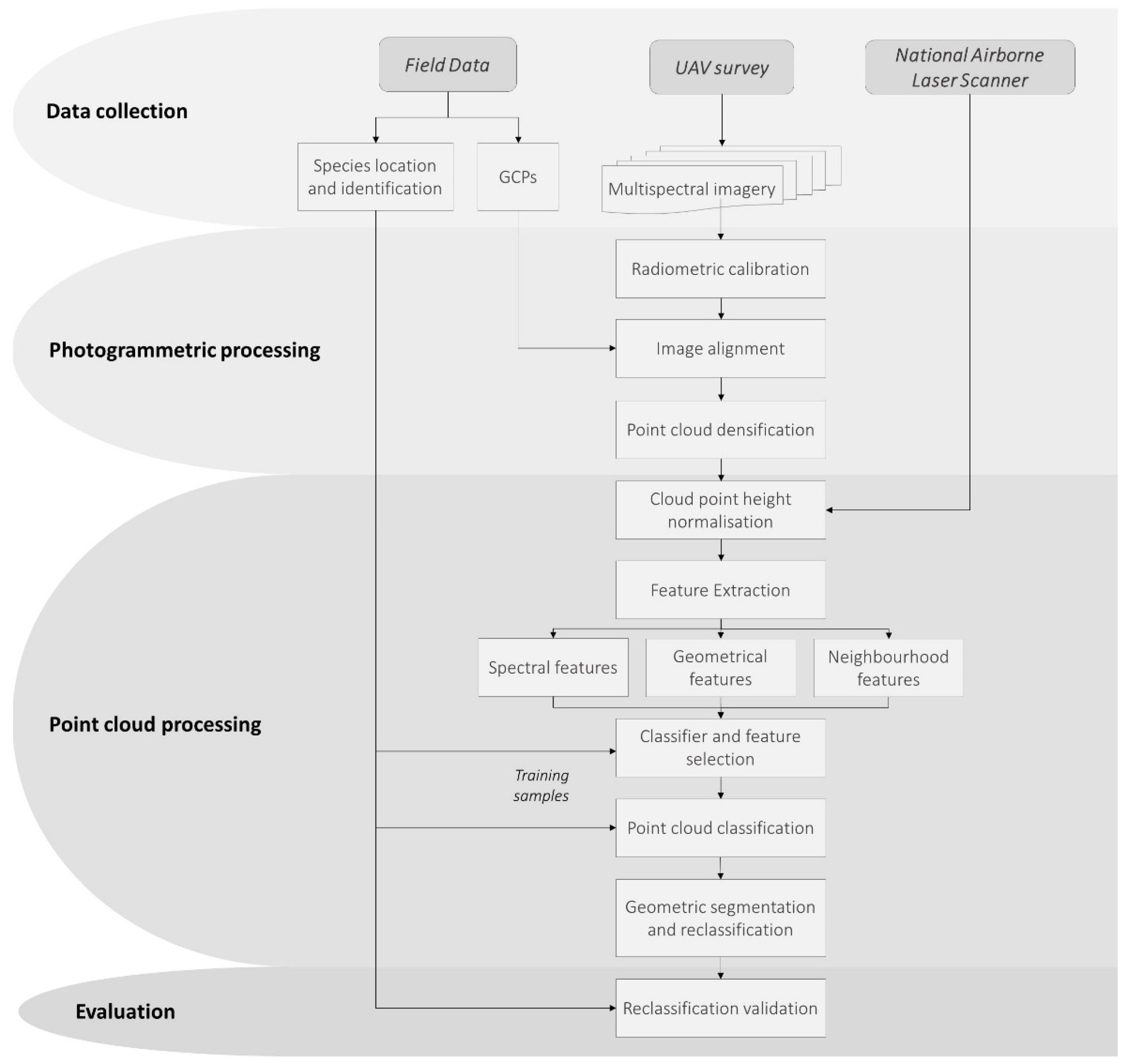
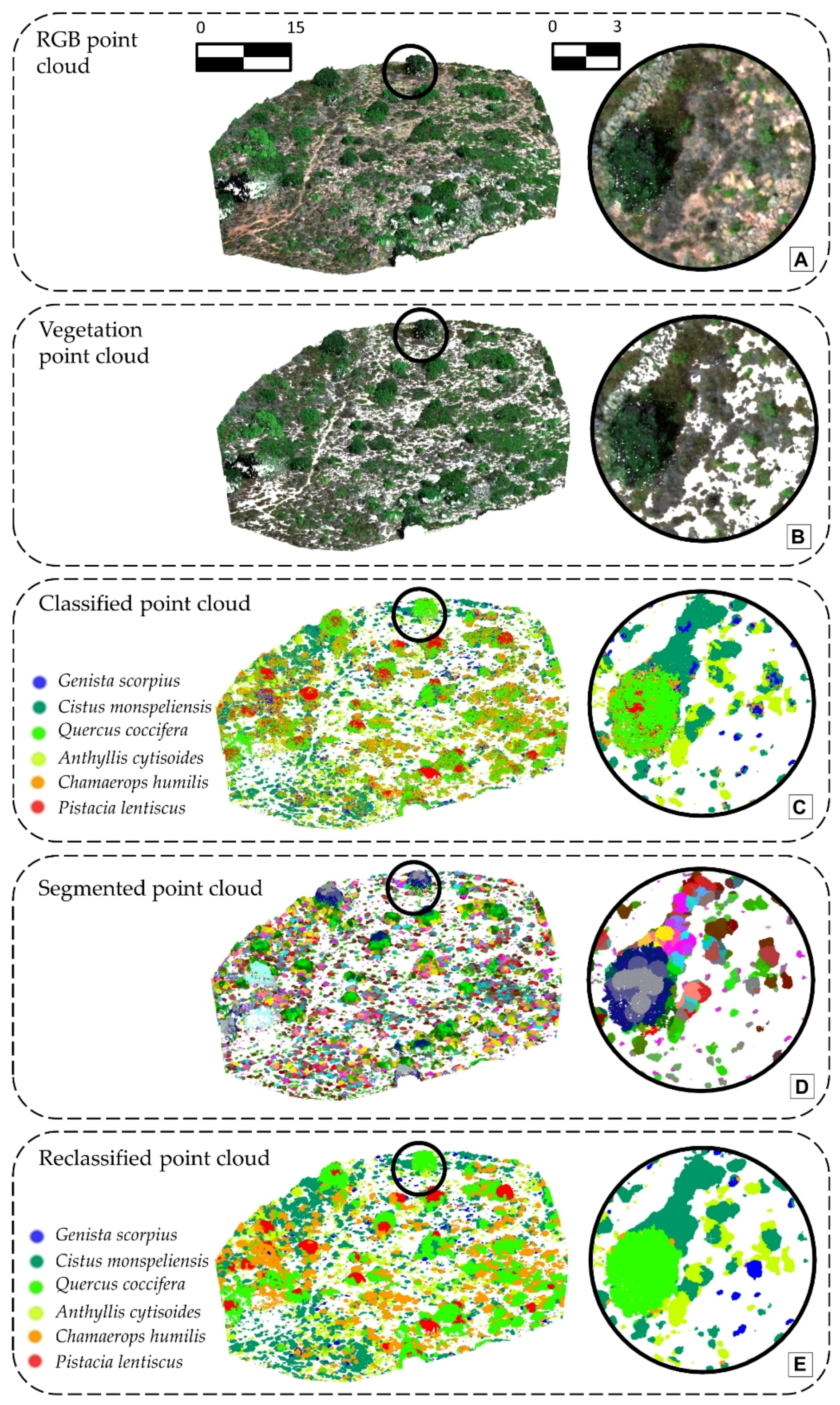
2.2. Overview of the Method
2.3. GNSS and UAV Data Collection
2.4. Photogrammetric Processing
2.5. Height Normalisation
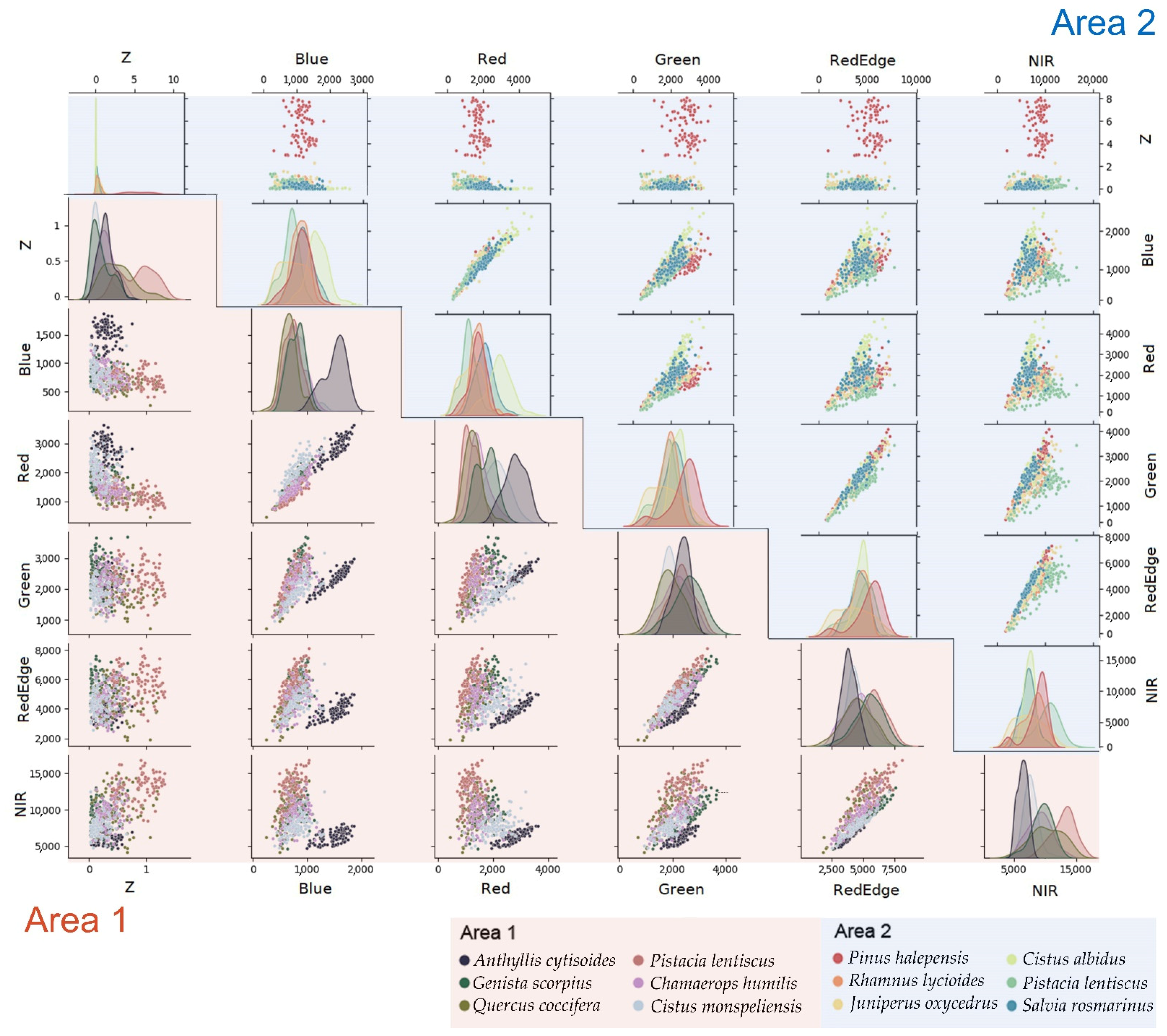
2.6. Feature Extraction
2.7. Machine and Deep Learning Models
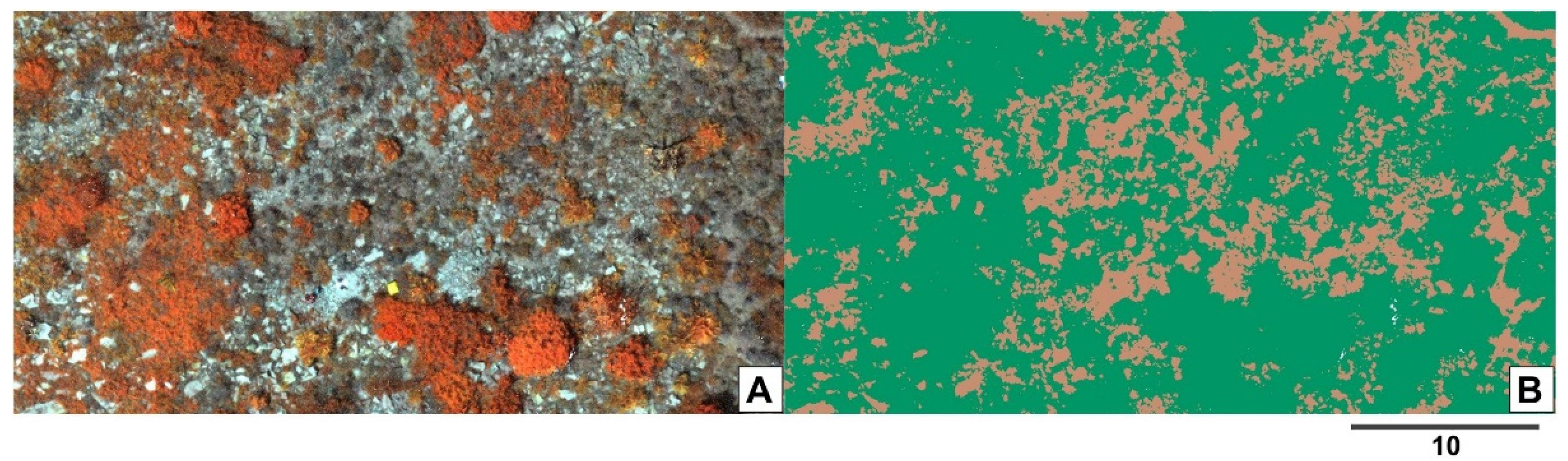
2.8. Point Cloud Segmentation and Reclassification
2.9. Evaluation
3. Results and Discussion
3.1. Generation and Processing of the Point Clouds
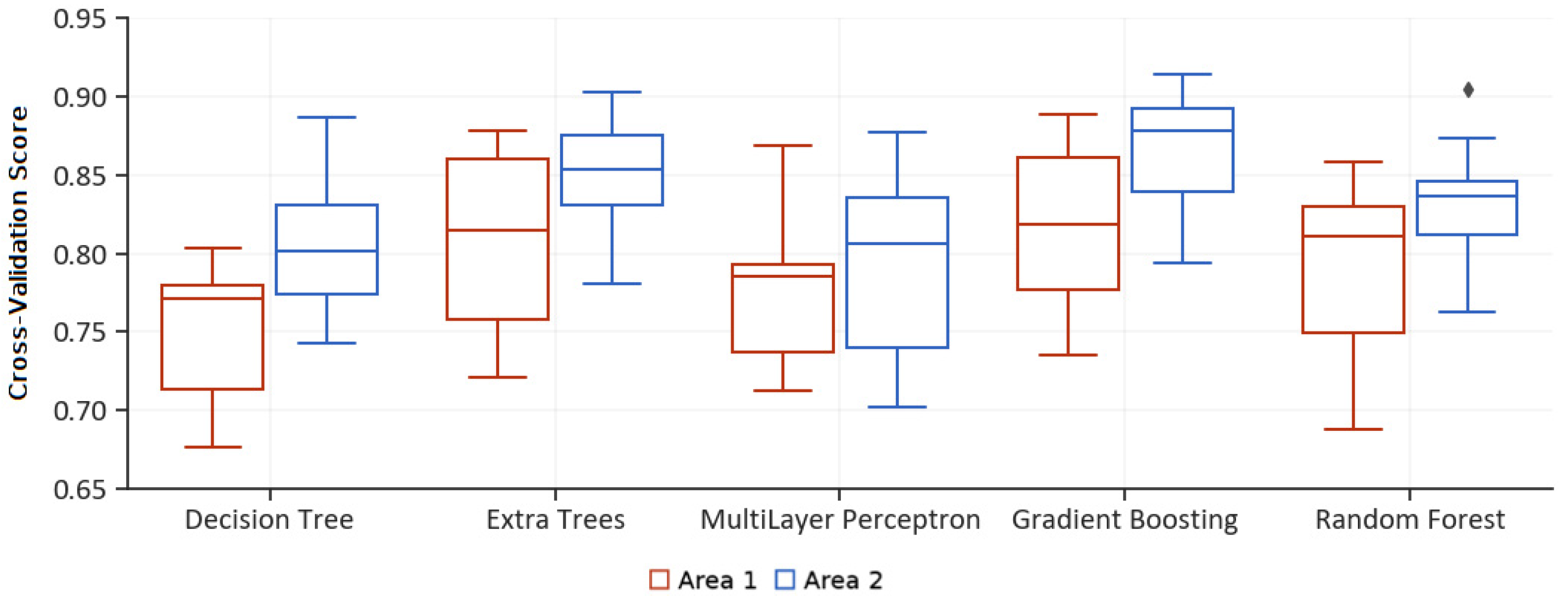
3.2. Assessment of Classification Methods
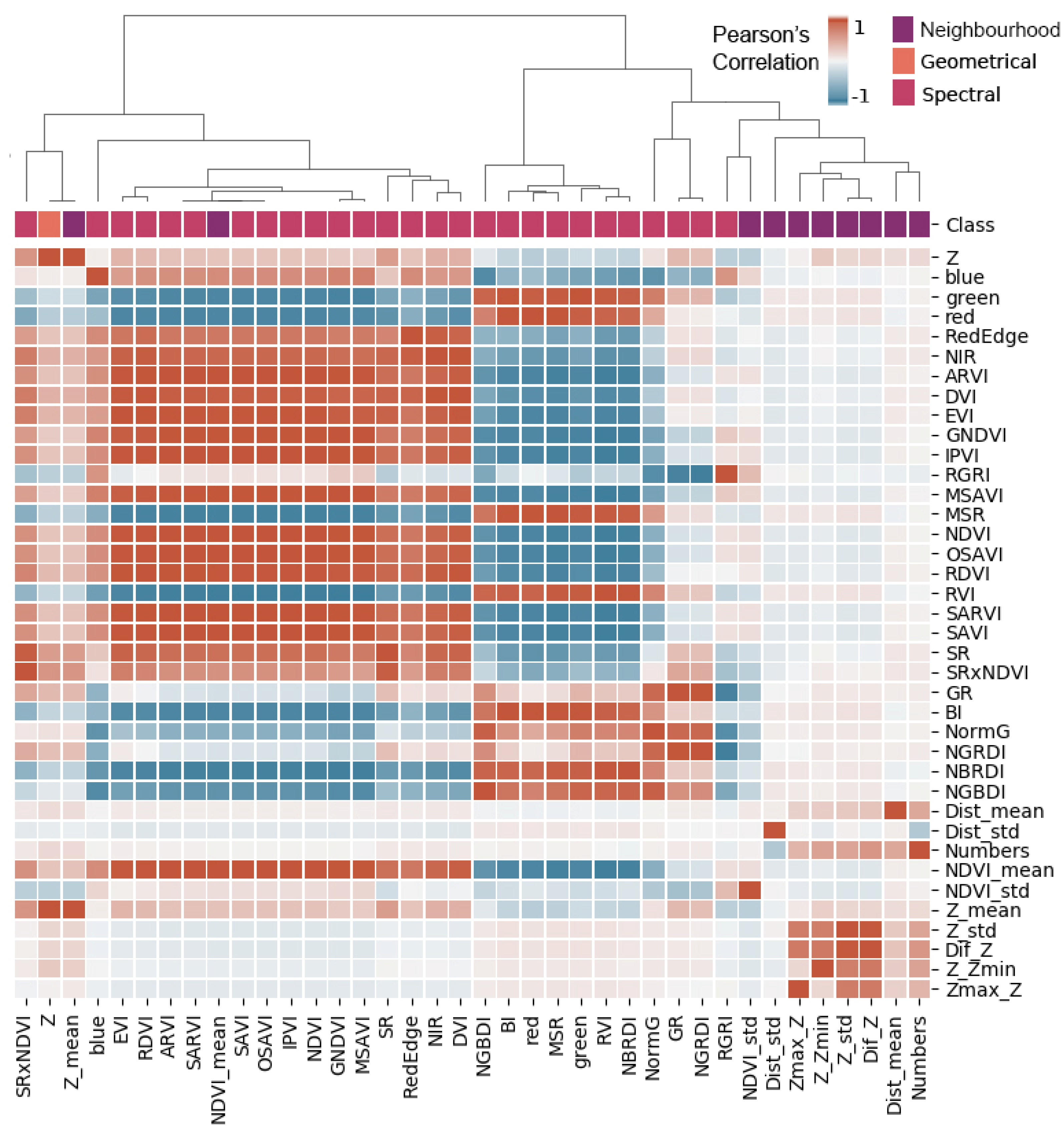
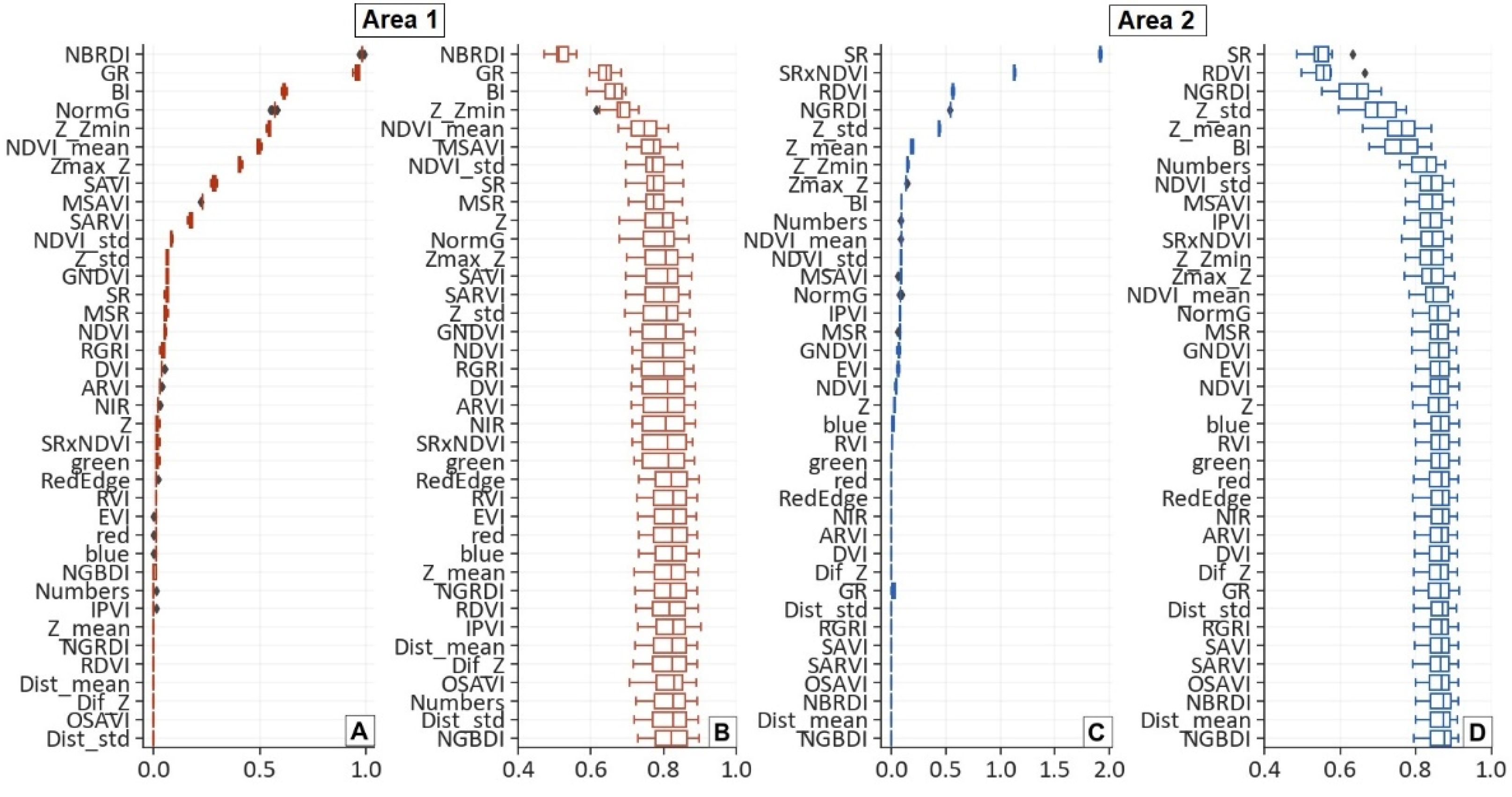
3.3. Feature Selection and Final Classification Model
3.4. Vegetation Classification Accuracy
3.5. Improving Wildfire Behaviour Modelling
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
References
- Velez, R.; Salazar, M.; Troenesgaard, J.; Saigal, R.; Wade, D.D.; Lundsford, J. Fire. Unasylva (Engl. Ed.) 1990, 41, 3–38. [Google Scholar]
- Botella-Martínez, M.A.; Fernández-Manso, A. Study of post-fire severity in the Valencia region comparing the NBR, RdNBR and RBR indexes derived from Landsat 8 images. Rev. Teledetecc. 2017, 49, 33–47. [Google Scholar] [CrossRef] [Green Version]
- Attiwill, P.M. The disturbance of forest ecosystems: The ecological basis for conservative management. For. Ecol. Manag. 1994, 63, 247–300. [Google Scholar] [CrossRef]
- Lionello, P.; Scarascia, L. The relation between climate change in the Mediterranean region and global warming. Reg. Environ. Chang. 2018, 18, 1481–1493. [Google Scholar] [CrossRef]
- Pausas, J.G.; Fernández-Muñoz, S. Fire regime changes in the Western Mediterranean Basin: From fuel-limited to drought-driven fire regime. Clim. Chang. 2012, 110, 215–226. [Google Scholar] [CrossRef] [Green Version]
- Turco, M.; Rosa-Cánovas, J.J.; Bedia, J.; Jerez, S.; Montávez, J.P.; Llasat, M.C.; Provenzale, A. Exacerbated fires in Mediterranean Europe due to anthropogenic warming projected with non-stationary climate-fire models. Nat. Commun. 2018, 9, 1–9. [Google Scholar] [CrossRef]
- Williams, C.; Biswas, T.; Black, I.; Harris, P.; Heading, S.; Marton, L.; Czako, M.; Pollock, R.; Virtue, J. Use of poor quality water to produce high biomass yields of giant reed (Arundo donax L.) on marginal lands for biofuel or pulp/paper. Acta Hortic. 2009, 806, 595–602. [Google Scholar] [CrossRef]
- López-Santalla, A.; López-Garcia, M. Los Incendios Forestales en España. Decenio 2006–2015; Ministerio de Agricultura Pesca y Alimentación: Madrid, Spain, 2019.
- WWF España. Arde el Mediterráneo; WWF/Adena: Madrid, Spain, 2019. [Google Scholar]
- Campo, J. Efectos de Incendios Experimentales Repetidos en la Agregación del Suelo y su Evolución Temporal. Ph.D. Thesis, Universidad de Valencia España, Valencia, Spain, 2012. [Google Scholar]
- Giorgi, F. Climate change hot-spots. Geophys. Res. Lett. 2006, 33, L08707. [Google Scholar] [CrossRef]
- Oliveira, S.; Rocha, J.; Sá, A. Wildfire risk modeling. Curr. Opin. Environ. Sci. Health 2021, 23, 100274. [Google Scholar] [CrossRef]
- Bakhshaii, A.; Johnson, E.A. A review of a new generation of wildfire–atmosphere modeling. Can. J. For. Res. 2019, 49, 565–574. [Google Scholar] [CrossRef] [Green Version]
- Shin, P.; Sankey, T.; Moore, M.; Thode, A. Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand. Remote Sens. 2018, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Mell, W.; Jenkins, M.A.; Gould, J.; Cheney, P. A physics-based approach to modelling grassland fires. Int. J. Wildl. Fire 2007, 16, 1–22. [Google Scholar] [CrossRef]
- Stratton, R.D. Assessing the effectiveness of landscape fuel treatments on fire growth and behavior. J. For. 2004, 102, 32–40. [Google Scholar]
- Linn, R.; Reisner, J.; Colman, J.J.; Winterkamp, J. Studying wildfire behavior using FIRETEC. Int. J. Wildl. Fire 2002, 11, 233–246. [Google Scholar] [CrossRef]
- Keane, R.E. Wildland Fuel Fundamentals and Applications; Springer: Missoula, MT, USA, 2015; ISBN 3319090151. [Google Scholar]
- Rollins, M.G. LANDFIRE: A nationally consistent vegetation, wildland fire, and fuel assessment. Int. J. Wildl. Fire 2009, 18, 235–249. [Google Scholar] [CrossRef] [Green Version]
- Kerr, J.T.; Ostrovsky, M. From space to species: Ecological applications for remote sensing. Trends Ecol. Evol. 2003, 18, 299–305. [Google Scholar] [CrossRef]
- De Cáceres, M.; Casals, P.; Gabriel, E.; Castro, X. Scaling-up individual-level allometric equations to predict stand-level fuel loading in Mediterranean shrublands. Ann. For. Sci. 2019, 76, 1–17. [Google Scholar] [CrossRef]
- Pyne, S.J. Introduction to Wildland Fire. Fire Management in the United States; John Wiley & Sons: New York, NY, USA, 1984; ISBN 047109658X. [Google Scholar]
- Crespo-Peremarch, P.; Tompalski, P.; Coops, N.C.; Ruiz, L.Á. Characterizing understory vegetation in Mediterranean forests using full-waveform airborne laser scanning data. Remote Sens. Environ. 2018, 217, 400–413. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef] [Green Version]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; et al. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef] [Green Version]
- Sothe, C.; Dalponte, M.; de Almeida, C.M.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree species classification in a highly diverse subtropical forest integrating UAV-based photogrammetric point cloud and hyperspectral data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef] [Green Version]
- Peris Felipo, F.J.; Peydró, R. Cerambycidae (Coleoptera) diversity and community structure in the Mediterranean forest of the Natural Park of Sierra Calderona (Spain). Frustula Entomol. 2012, 23, 180–191. [Google Scholar]
- United States Geological Survey Unmanned Aircraft Systems Data Post-Processing. Available online: https://training.fws.gov/courses/references/tutorials/geospatial/CSP7304/2016documents/HandsOn_Afternoon/UAS/UAS%20II%20Post%20Processing/PhotoScan%20Processing%20Procedures%20DSLR%20Feb%202016.pdf (accessed on 1 August 2020).
- MicaSense Incorporated RedEdge Camera Radiometric Calibration Model. Available online: https://support.micasense.com/hc/en-us/articles/115000351194-RedEdge-Camera-Radiometric-Calibration-Model (accessed on 5 August 2021).
- Semyonov, D. Algorithms Used in Agisoft Photoscan [Msg 2]. Available online: https://www.agisoft.com/forum/index.php?topic=89.0 (accessed on 26 July 2021).
- Tuominen, S.; Näsi, R.; Honkavaara, E.; Balazs, A.; Hakala, T.; Viljanen, N.; Pölönen, I.; Saari, H.; Ojanen, H. Assessment of Classifiers and Remote Sensing Features of Hyperspectral Imagery and Stereo-Photogrammetric Point Clouds for Recognition of Tree Species in a Forest Area of High Species Diversity. Remote Sens. 2018, 10, 714. [Google Scholar] [CrossRef] [Green Version]
- Mesas-Carrascosa, F.-J.; de Castro, A.I.; Torres-Sánchez, J.; Triviño-Tarradas, P.; Jiménez-Brenes, F.M.; García-Ferrer, A.; López-Granados, F. Classification of 3D point clouds using color vegetation indices for precision viticulture and digitizing applications. Remote Sens. 2020, 12, 317. [Google Scholar] [CrossRef] [Green Version]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Kaufman, Y.J.; Tanre, D. Atmospherically resistant vegetation index (ARVI) for EOS-MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 261–270. [Google Scholar] [CrossRef]
- Fraser, R.H.; Van der Sluijs, J.; Hall, R.J. Calibrating satellite-based indices of burn severity from UAV-derived metrics of a burned boreal forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef] [Green Version]
- Richardson, A.J.; Wiegand, C.L. Distinguishing vegetation from soil background information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Huete, A.; Justice, C.; Van Leeuwen, W. MODIS vegetation index (MOD13). Algorithm Theor. Basis Doc. 1999, 3, 295–309. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Ray, T.; Farr, T.; Blom, R.; Crippen, R. Monitoring Land Use and Degradation Using Satellite and Airborne Data; Jet Propulsion Laboratory: Washington, DC, USA, 1993. [Google Scholar]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of vegetation indices and a modified simple ratio for boreal applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; NASA/GSFC Type III Final Report; NASA/GSFC: Greenbelt, MD, USA, 1974.
- Carbonell-Rivera, J.P.; Estornell, J.; Ruiz, L.A.; Torralba, J.; Crespo-Peremarch, P. Classification of UAV-based photogrammetric point clouds of riverine species using machine learning algorithms: A case study in the Palancia river, Spain. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 659–666. [Google Scholar] [CrossRef]
- Shimada, S.; Matsumoto, J.; Sekiyama, A.; Buhe, A.; Yokohama, M. Detecting the Poaceae grass intensity in Mongolian grasslands from normalized difference indices. 37th COSPAR Sci. Assem. 2008, 37, 2859. [Google Scholar]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mcmurtrey, J.E.; Walthall, C.L. Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Stricker, R.; Müller, S.; Gross, H.-M. Non-contact video-based pulse rate measurement on a mobile service robot. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 1056–1062. [Google Scholar]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Roujean, J.-L.; Breon, F.-M. Estimating PAR absorbed by vegetation from bidirectional reflectance measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
- Gamon, J.A.; Surfus, J.S. Assessing leaf pigment content and activity with a reflectometer. New Phytol. 1999, 143, 105–117. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf-area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Gong, P.; Pu, R.; Biging, G.S.; Larrieu, M.R. Estimation of forest leaf area index using vegetation indices derived from Hyperion hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1355–1362. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Tian, J.; Zhu, X.X. Linking points with labels in 3D: A review of point cloud semantic segmentation. IEEE Geosci. Remote Sens. Mag. 2020, 8, 38–59. [Google Scholar] [CrossRef] [Green Version]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Breiman, L.; Friedman, J.; Stone, C.J.; Olshen, R.A. Classification and Regression Trees; CRC press: Boca Raton, FL, USA, 1984; ISBN 0412048418. [Google Scholar]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely randomized trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 1189–1232. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.E. Connectionist learning procedures. In Machine Learning; Elsevier: Washington, DC, USA, 1990; pp. 555–610. [Google Scholar]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Roussel, J.-R.; Auty, D. Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. R Packag. Version 3.2.3. 2021. Available online: https://rdrr.io/cran/lidR/ (accessed on 31 October 2021).
- Becker, C.; Häni, N.; Rosinskaya, E.; d’Angelo, E.; Strecha, C. Classification of aerial photogrammetric 3D point clouds. arXiv 2017, arXiv:1705.08374. [Google Scholar] [CrossRef] [Green Version]
- Jozdani, S.E.; Johnson, B.A.; Chen, D. Comparing deep neural networks, ensemble classifiers, and support vector machine algorithms for object-based urban land use/land cover classification. Remote Sens. 2019, 11, 1713. [Google Scholar] [CrossRef] [Green Version]
- Chirici, G.; Scotti, R.; Montaghi, A.; Barbati, A.; Cartisano, R.; Lopez, G.; Marchetti, M.; McRoberts, R.E.; Olsson, H.; Corona, P. Stochastic gradient boosting classification trees for forest fuel types mapping through airborne laser scanning and IRS LISS-III imagery. Int. J. Appl. Earth Obs. Geoinf. 2013, 25, 87–97. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Shen, X.; Cao, L.; Coops, N.C.; Goodbody, T.R.H.; Zhong, T.; Zhao, W.; Sun, Q.; Ba, S.; Zhang, Z.; et al. Tree species classification using UAS-based digital aerial photogrammetry point clouds and multispectral imageries in subtropical natural forests. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102173. [Google Scholar] [CrossRef]
- Tarragó Clivillé, D. Estudi de la Capacitat Predictiva del Simulador WFDS per a l’avaluació d’incendis Forestals a Escala de Laboratory. Master’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2013. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scientific Name (Common Name) | Description of Shape and Colour | N. of Plants Measured | Number of Training Points | Study Area |
|---|---|---|---|---|
| Anthyllis cytisoides L. (Albaida) | Shrub with erect branches from the base. Greyish-whitish appearance, hairy in the younger parts. | 18 | 1910 | 1 |
| Chamaerops humilis L. (European fan palm) | Shrubby plant with a central stem, palmate fan, and very large green leaves. | 73 | 5528 | 1 |
| Cistus monspeliensis L. (Montpelier cistus) | Shrub with erect branches from the base. Linear-lanceolate dark green leaves. | 90 | 5651 | 1 |
| Genista scorpius (L.) DC. (Aulaga) | Greyish-green genistoid shrub, with a central stem and highly branched. Almost leafless (only in spring). | 44 | 2627 | 1 |
| Quercus coccifera L. (Kermes oak) | Dense shrub, very branched, covered with coriaceous and glabrous leaves, with shiny surface and intense green colour. | 44 | 4187 | 1 |
| Cistus albidus L. (Grey-leaf cistus) | Branched shrub with grey bark and glaucous-green ovate-lanceolate leaves. Whitish appearance. | 66 | 1499 | 2 |
| Juniperus oxycedrus L. (Cade juniper) | Shrub with a central trunk that branches a few centimetres above the ground. Needle-shaped leaves, very dense, and intense green colour. | 81 | 7653 | 2 |
| Pinus halepensis Mill. (Aleppo pine) | Tree with a rounded or flat-topped crown of slender, irregular horizontal, upturned branches. Intense green needles in fascicles. | 33 | 3308 | 2 |
| Rhamnus lycioides L. (Black hawthorn) | Shrub of medium or short stature, thorny, and highly branched from the base creating a thicket. The leaves are green grouped in fascicles. | 83 | 3804 | 2 |
| Salvia rosmarinus Schleid. (Rosemary) | Very branched shrub from the base. Branches densely covered with glossy green leaves on the upper surface and whitish on the lower. | 245 | 32,596 | 2 |
| Pistacia lentiscus L. (Mastic) | Branchy shrub that reaches the size of a small tree. Mature bark is greyish, but in the branches and young specimens it is reddish. Dark shiny leaves on the upper surface, somewhat lighter on the lower. | 27; 102 | 2536; 4569 | 1; 2 |
| Index (Description) | Equation | Reference |
|---|---|---|
| ARVI (Atmospherically Resistant Vegetation Index) | [37] | |
| BI (Brightness) | [38] | |
| DVI (Differential Vegetation Index) | [39] | |
| EVI (Enhanced Vegetation Index) | [40] | |
| GNDVI (Green Normalised Difference Vegetation Index) | [41] | |
| GR (Green divided by red) | [38] | |
| IPVI (Infrared Percentage Vegetation Index) | [42] | |
| MSAVI (Modified Soil-Adjusted Vegetation Index) | [43] | |
| MSR (Modified Simple Ratio Index) | [44] | |
| NDVI (Normalised Difference Vegetation Index) | [45] | |
| NBRDI (Normalised Blue-Red Difference Index) | [46] | |
| NGBDI (Normalised Green-Blue Difference Index) | [47] | |
| NGRDI (Normalised Green-Red Difference Index) | [48] | |
| NormG (Normalised Greenness) | [49] | |
| OSAVI (Optimised Soil Adjusted Vegetation Index) | [50] | |
| RDVI (Renormalised Difference Vegetation Index) | [51] | |
| RGRI (Red Green Ratio Index) | [52] | |
| RVI (Ratio Vegetation Index) | [53] | |
| SARVI (Soil and Atmospherically Resistant Vegetation Index) | [54] | |
| SAVI (Soil Adjusted Vegetation Index) | [54] | |
| SR (Simple Ration Vegetation Index) | [55] | |
| SRxNDVI (Simple Ratio × Normalised Difference Vegetation Index) | [56] |
| Name (Description) | Equation |
|---|---|
| Dist_mean (Mean distance of the point with its neighbouring points) | |
| Dist_std (Standard deviation of the point with its neighbouring points) | |
| NDVI_mean (Mean NDVI of the point and its neighbouring points) | |
| NDVI_std (Standard deviation NDVI of the point and its neighbouring points) | |
| Numbers (Number of neighbours) | |
| Z_mean (Mean height of the point and its neighbours) | |
| Z_std (Standard deviation height of the point and its neighbours) | |
| Dif_Z (Maximum height of the neighbourhood minus minimum height of the neighbourhood) | |
| Z_Zmin (Height of the point minus neighbourhood minimum height) | |
| Zmax-Z (Maximum height of the neighbourhood minus height of the point) |
| Model | Hyperparameter #1 (Values) | Hyperparameter #2 (Values) | Hyperparameter #3 (Values) | Hyperparameter #4 (Values) |
|---|---|---|---|---|
| Decision Tree Extra Trees Gradient Boosting | Maximum depth of the tree (5, 10, None) | Minimum number of samples required to split an internal node (2, 3, 5) | Minimum number of samples required to be at a leaf node (1, 2, 5) | - |
| Random Forest | Number of trees in the forest (200, 500) | Number of features to consider (‘auto’, ‘sqrt’, ‘log2’) | Maximum depth of the tree (4, 5, 6, 7, 8) | Function to measure the quality of a split (‘gini’, ‘entropy’) |
| MultiLayer Perceptron | Number of neurons in the ith hidden layer (50, 50, 50), (50, 100, 50), (100) | Activation (‘tanh’, ‘relu’) | Solver (‘sgd’, ‘adam’) | Alpha (0.0001, 0.05) |
| Area 1 | Area 2 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean Cross-Validated Score | Mean Fit Time (s) | Mean Cross-Validated Score | Mean Fit Time (s) | ||||||||||||
| Minimum number of samples at a leaf node | 1 | 0.745 | 0.757 | 0.781 | 1347 | 1473 | 1814 | 0.891 | 0.894 | 0.901 | 5985 | 5859 | 6516 | None | Maximum depth of the tree |
| 2 | 0.793 | 0.792 | 0.797 | 1698 | 1684 | 1568 | 0.908 | 0.908 | 0.909 | 5968 | 5966 | 5820 | |||
| 5 | 0.809 | 0.810 | 0.809 | 1109 | 1110 | 1033 | 0.914 | 0.915 | 0.914 | 4967 | 4969 | 4601 | |||
| 1 | 0.819 | 0.818 | 0.818 | 258 | 256 | 256 | 0.910 | 0.911 | 0.912 | 695 | 702 | 703 | 5 | ||
| 2 | 0.818 | 0.821 | 0.819 | 256 | 255 | 255 | 0.911 | 0.911 | 0.910 | 707 | 703 | 697 | |||
| 5 | 0.820 | 0.819 | 0.819 | 255 | 254 | 258 | 0.912 | 0.912 | 0.911 | 705 | 726 | 743 | |||
| 1 | 0.812 | 0.812 | 0.810 | 487 | 483 | 469 | 0.913 | 0.913 | 0.914 | 1395 | 1344 | 1291 | 10 | ||
| 2 | 0.811 | 0.812 | 0.812 | 467 | 464 | 462 | 0.913 | 0.914 | 0.914 | 1294 | 1298 | 1298 | |||
| 5 | 0.817 | 0.817 | 0.815 | 460 | 471 | 496 | 0.915 | 0.915 | 0.914 | 1317 | 1344 | 1340 | |||
| 2 | 3 | 5 | 2 | 3 | 5 | 2 | 3 | 5 | 2 | 3 | 5 | ||||
| Minimum number of samples to split an internal node | |||||||||||||||
| Classified as | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Area 1 | Area 2 | ||||||||||||
| Genista scorpius | Cistus monspeliensis | Quercus coccifera | Anthyllis cytisoides | Chamaerops humilis | Pistacia lentiscus | Cistus albidus | Rhamnus lycioides | Cade juniper | Pinus halepensis | Pistacia lentiscus | Salvia Rosmarinus | ||
| Truth | 1 | 4816 | 137 | 0 | 0 | 42 | 0 | 4516 | 239 | 315 | 317 | 229 | 1215 |
| 2 | 773 | 15,198 | 1579 | 184 | 850 | 303 | 0 | 16,077 | 469 | 185 | 1095 | 808 | |
| 3 | 4 | 476 | 41,342 | 0 | 482 | 12,567 | 0 | 4994 | 54,185 | 5085 | 13,381 | 3014 | |
| 4 | 98 | 979 | 25 | 6660 | 213 | 44 | 21 | 566 | 1431 | 1,110,973 | 2012 | 316 | |
| 5 | 1016 | 1128 | 3714 | 53 | 24,663 | 5327 | 4 | 124 | 136 | 961 | 59,607 | 37 | |
| 6 | 0 | 0 | 613 | 0 | 0 | 45,833 | 598 | 4250 | 4364 | 46 | 1537 | 46,186 | |
| Pr | 0.72 | 0.85 | 0.87 | 0.97 | 0.94 | 0.72 | 0.88 | 0.61 | 0.89 | 0.99 | 0.77 | 0.90 | |
| Re | 0.96 | 0.80 | 0.75 | 0.83 | 0.69 | 0.99 | 0.66 | 0.86 | 0.67 | 1.00 | 0.98 | 0.81 | |
| Fm | 0.82 | 0.83 | 0.81 | 0.89 | 0.79 | 0.83 | 0.75 | 0.72 | 0.77 | 1.00 | 0.86 | 0.85 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carbonell-Rivera, J.P.; Torralba, J.; Estornell, J.; Ruiz, L.Á.; Crespo-Peremarch, P. Classification of Mediterranean Shrub Species from UAV Point Clouds. Remote Sens. 2022, 14, 199. https://doi.org/10.3390/rs14010199
Carbonell-Rivera JP, Torralba J, Estornell J, Ruiz LÁ, Crespo-Peremarch P. Classification of Mediterranean Shrub Species from UAV Point Clouds. Remote Sensing. 2022; 14(1):199. https://doi.org/10.3390/rs14010199
Chicago/Turabian StyleCarbonell-Rivera, Juan Pedro, Jesús Torralba, Javier Estornell, Luis Ángel Ruiz, and Pablo Crespo-Peremarch. 2022. "Classification of Mediterranean Shrub Species from UAV Point Clouds" Remote Sensing 14, no. 1: 199. https://doi.org/10.3390/rs14010199