
Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning



Abstract
:
1. Introduction
2. Automation in Archaeological Remote Sensing
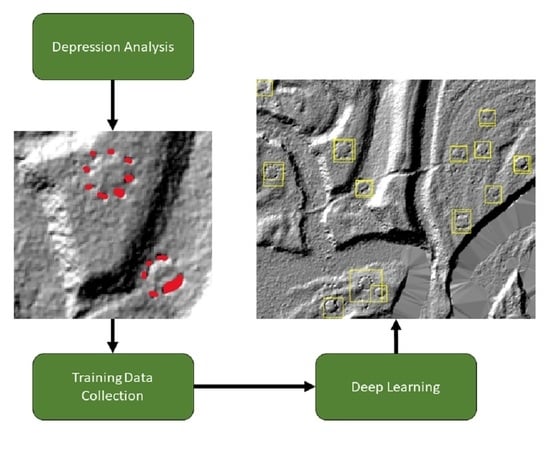
A Solution to Training Data Issues: Hydrological Depression Algorithms
3. Materials and Methods
3.1. Depression Algorithm
3.2. Deep Learning with RetinaNet
3.3. Implementing RetinaNet CNN in ArcGIS Pro
4. Results
4.1. Depression Analysis Results
4.2. RetinaNet Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ågren, M. Iron-Making Societies: Early Industrial Development in Sweden and Russia, 1600–1900; Berghahn Books: Brooklyn, NY, USA, 1998. [Google Scholar]
- Petterssen, J.E. (Ed.) Svenskt Järn Under 2500 år: Från Gruvpigor och Smeddrängar till Operatörer; Bokbörsen AB: Stockholm, Sweden, 1997. [Google Scholar]
- Svensson, E. Människor i Utmark. [Lund Studies in Medieval Archaeology 21]; Lund University: Lund, Sweden, 1998. [Google Scholar]
- Deforce, K.; Groenewoudt, B.; Haneca, K. 2500 Years of Charcoal Production in the Low Countries: The Chronology and Typology of Charcoal Kilns and Their Relation with Early Iron Production. Quat. Int. 2021, 593–594, 295–305. [Google Scholar] [CrossRef]
- Hennius, A. Spår Av Kolning: Arkeologiskt Kunskapsunderlag Och Forskningsöversikt; Riksantikvarieämbetet: Stockholm, Sweden, 2019. [Google Scholar]
- Arpi, G. The Supply with Charcoal of the Swedish Iron Industry from 1830 to 1950. Geogr. Ann. 1953, 35, 11–27. [Google Scholar]
- Jernkontoret Svenska Järn- och Stålindustrins Historia. Available online: https://www.jernkontoret.se/sv/stalindustrin/stalindustrins-historia/ (accessed on 3 August 2021).
- Anglert, M.; Lagerås, P. (Eds.) Människorna Och Skogen: Arkeologiska Platser i Örkelljungatrakten; Riksantikvarieämbetet: Stockholm, Sweden, 2009. [Google Scholar]
- Stereńczak, K.; Zapłata, R.; Wójcik, J.; Kraszewski, B.; Mielcarek, M.; Mitelsztedt, K.; Białczak, M.; Krok, G.; Kuberski, Ł.; Markiewicz, A.; et al. ALS-Based Detection of Past Human Activities in the Białowieża Forest—New Evidence of Unknown Remains of Past Agricultural Systems. Remote Sens. 2020, 12, 2657. [Google Scholar] [CrossRef]
- Zapłata, R.; Bakuła, K.; Ostrowski, W. Transformation Methods and ALS-Data Visualization in the Studies of Historical Charcoal Piles. In Proceedings of the International Multidisciplinary Scientific Conferences on Social Sciences and Arts SGEM2014, Albena, Bulgaria, 2–7 September 2014; pp. 417–424. [Google Scholar]
- Wilmshurst, J.M.; Hunt, T.L.; Lipo, C.P.; Anderson, A.J. High-Precision Radiocarbon Dating Shows Recent and Rapid Initial Human Colonization of East Polynesia. Proc. Natl. Acad. Sci. USA 2011, 108, 1815–1820. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bonhage, A.; Eltaher, M.; Raab, T.; Breuß, M.; Raab, A.; Schneider, A. A Modified Mask Region-Based Convolutional Neural Network Approach for the Automated Detection of Archaeological Sites on High-Resolution Light Detection and Ranging-Derived Digital Elevation Models in the North German Lowland. Archaeol. Prospect. 2021, 28, 177–186. [Google Scholar] [CrossRef]
- Carter, V.A.; Brunelle, A.; Power, M.J.; DeRose, R.J.; Bekker, M.F.; Hart, I.; Brewer, S.; Spangler, J.; Robinson, E.; Abbott, M.; et al. Legacies of Indigenous Land Use Shaped Past Wildfire Regimes in the Basin-Plateau Region, USA. Commun. Earth Environ. 2021, 2, 72. [Google Scholar] [CrossRef]
- Schneider, A.; Takla, M.; Nicolay, A.; Raab, A.; Raab, T. A Template-Matching Approach Combining Morphometric Variables for Automated Mapping of Charcoal Kiln Sites: Automated Mapping of Charcoal Kiln Sites. Archaeol. Prospect. 2015, 22, 45–62. [Google Scholar] [CrossRef]
- Raab, A.; Takla, M.; Raab, T.; Nicolay, A.; Schneider, A.; Rösler, H.; Heußner, K.-U.; Bönisch, E. Pre-Industrial Charcoal Production in Lower Lusatia (Brandenburg, Germany): Detection and Evaluation of a Large Charcoal-Burning Field by Combining Archaeological Studies, GIS-Based Analyses of Shaded-Relief Maps and Dendrochronological Age Determination. Quat. Int. 2015, 367, 111–122. [Google Scholar] [CrossRef]
- Hirsch, F.; Raab, T.; Ouimet, W.; Dethier, D.; Schneider, A.; Raab, A. Soils on Historic Charcoal Hearths: Terminology and Chemical Properties. Soil Sci. Soc. Am. J. 2017, 81, 1427–1435. [Google Scholar] [CrossRef] [Green Version]
- Donovan, S.; Ignatiadis, M.; Ouimet, W.; Dethier, D.; Hren, M. Gradients of Geochemical Change in Relic Charcoal Hearth Soils, Northwestern Connecticut, USA. Catena 2021, 197, 104991. [Google Scholar] [CrossRef]
- Rutkiewicz, P.; Malik, I.; Wistuba, M.; Osika, A. High Concentration of Charcoal Hearth Remains as Legacy of Historical Ferrous Metallurgy in Southern Poland. Quat. Int. 2019, 512, 133–143. [Google Scholar] [CrossRef]
- Boheman, E. (Ed.) Svenska Turistföreningens Årsskrift 1921; Wahlström & Widstrand: Stockholm, Sweden, 1921. [Google Scholar]
- Davis, D.S. Object-Based Image Analysis: A Review of Developments and Future Directions of Automated Feature Detection in Landscape Archaeology. Archaeol. Prospect. 2019, 26, 155–163. [Google Scholar] [CrossRef]
- Magnini, L.; Bettineschi, C. Theory and Practice for an Object-Based Approach in Archaeological Remote Sensing. J. Archaeol. Sci. 2019, 107, 10–22. [Google Scholar] [CrossRef]
- Traviglia, A.; Torsello, A. Landscape Pattern Detection in Archaeological Remote Sensing. Geosciences 2017, 7, 128. [Google Scholar] [CrossRef] [Green Version]
- Agapiou, A. Optimal Spatial Resolution for the Detection and Discrimination of Archaeological Proxies in Areas with Spectral Heterogeneity. Remote Sens. 2020, 12, 136. [Google Scholar] [CrossRef] [Green Version]
- Caspari, G.; Crespo, P. Convolutional Neural Networks for Archaeological Site Detection—Finding “Princely” Tombs. J. Archaeol. Sci. 2019, 110, 104998. [Google Scholar] [CrossRef]
- Cerrillo-Cuenca, E. An Approach to the Automatic Surveying of Prehistoric Barrows through LiDAR. Quat. Int. 2017, 435, 135–145. [Google Scholar] [CrossRef]
- Davis, D.S.; Lipo, C.P.; Sanger, M.C. A Comparison of Automated Object Extraction Methods for Mound and Shell-Ring Identification in Coastal South Carolina. J. Archaeol. Sci. Rep. 2019, 23, 166–177. [Google Scholar] [CrossRef]
- Freeland, T.; Heung, B.; Burley, D.V.; Clark, G.; Knudby, A. Automated Feature Extraction for Prospection and Analysis of Monumental Earthworks from Aerial LiDAR in the Kingdom of Tonga. J. Archaeol. Sci. 2016, 69, 64–74. [Google Scholar] [CrossRef]
- Verschoof-van der Vaart, W.B.; Landauer, J. Using CarcassonNet to Automatically Detect and Trace Hollow Roads in LiDAR Data from the Netherlands. J. Cult. Herit. 2020, 47, 143–154. [Google Scholar] [CrossRef]
- Verschoof-van der Vaart, W.B.; Lambers, K. Learning to Look at LiDAR: The Use of R-CNN in the Automated Detection of Archaeological Objects in LiDAR Data from the Netherlands. J. Comput. Appl. Archaeol. 2019, 2, 31–40. [Google Scholar] [CrossRef] [Green Version]
- Trier, Ø.D.; Cowley, D.C.; Waldeland, A.U. Using Deep Neural Networks on Airborne Laser Scanning Data: Results from a Case Study of Semi-Automatic Mapping of Archaeological Topography on Arran, Scotland. Archaeol. Prospect. 2019, 26, 165–175. [Google Scholar] [CrossRef]
- Davis, D.S.; Caspari, G.; Lipo, C.P.; Sanger, M.C. Deep Learning Reveals Extent of Archaic Native American Shell-Ring Building Practices. J. Archaeol. Sci. 2021, 132, 105433. [Google Scholar] [CrossRef]
- Lambers, K.; Verschoof-van der Vaart, W.; Bourgeois, Q. Integrating Remote Sensing, Machine Learning, and Citizen Science in Dutch Archaeological Prospection. Remote Sens. 2019, 11, 794. [Google Scholar] [CrossRef] [Green Version]
- Somrak, M.; Džeroski, S.; Kokalj, Ž. Learning to Classify Structures in ALS-Derived Visualizations of Ancient Maya Settlements with CNN. Remote Sens. 2020, 12, 2215. [Google Scholar] [CrossRef]
- Davis, D.S. Geographic Disparity in Machine Intelligence Approaches for Archaeological Remote Sensing Research. Remote Sens. 2020, 12, 921. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.; Sun, F.; Kong, T.; Zhang, W.; Yang, C.; Liu, C. A Survey on Deep Transfer Learning. In Artificial Neural Networks and Machine Learning, Proceedings of the International Conference on Artificial Neural Networks (ICANN 2018), Rhodes, Greece, 4–7 October 2018; Springer: Cham, Switzerland, 2018; pp. 270–279. [Google Scholar]
- Trier, Ø.D.; Reksten, J.H.; Løseth, K. Automated Mapping of Cultural Heritage in Norway from Airborne Lidar Data Using Faster R-CNN. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102241. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Venice, Italy, 22–29 October 2017; pp. 2117–2125. [Google Scholar]
- ESRI. ArcGIS Pro; Environmental Systems Research Institute, Inc.: Redlands, CA, USA, 2020. [Google Scholar]
- Davis, D.S.; Sanger, M.C.; Lipo, C.P. Automated Mound Detection Using Lidar and Object-Based Image Analysis in Beaufort County, South Carolina. Southeast. Archaeol. 2019, 38, 23–37. [Google Scholar] [CrossRef]
- Davis, D.S.; Buffa, D.C.; Wrobleski, A.C. Assessing the Utility of Open-Access Bathymetric Data for Shipwreck Detection in the United States. Heritage 2020, 3, 364–383. [Google Scholar] [CrossRef]
- Dolejš, M.; Pacina, J.; Veselý, M.; Brétt, D. Aerial Bombing Crater Identification: Exploitation of Precise Digital Terrain Models. ISPRS Int. J. Geo-Inf. 2020, 9, 713. [Google Scholar] [CrossRef]
- Rom, J.; Haas, F.; Stark, M.; Dremel, F.; Becht, M.; Kopetzky, K.; Schwall, C.; Wimmer, M.; Pfeifer, N.; Mardini, M.; et al. Between Land and Sea: An Airborne LiDAR Field Survey to Detect Ancient Sites in the Chekka Region/Lebanon Using Spatial Analyses. Open Archaeol. 2020, 6, 248–268. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, H.; Wang, S.; Yu, B.; Beck, R.; Hinkel, K. A Localized Contour Tree Method for Deriving Geometric and Topological Properties of Complex Surface Depressions Based on High-Resolution Topographical Data. Int. J. Geogr. Inf. Sci. 2015, 29, 2041–2060. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Creed, I.F. Distinguishing Actual and Artefact Depressions in Digital Elevation Data. Comput. Geosci. 2006, 32, 1192–1204. [Google Scholar] [CrossRef]
- Wu, Q.; Deng, C.; Chen, Z. Automated Delineation of Karst Sinkholes from LiDAR-Derived Digital Elevation Models. Geomorphology 2016, 266, 1–10. [Google Scholar] [CrossRef]
- ESRI. ArcGIS; Environmental Systems Research Institute, Inc.: Redlands, CA, USA, 2020. [Google Scholar]
- Riley, S.J.; DeGloria, S.D.; Elliot, R. Index That Quantifies Topographic Heterogeneity. Intermt. J. Sci. 1999, 5, 23–27. [Google Scholar]
- Davis, D.S.; DiNapoli, R.J.; Sanger, M.C.; Lipo, C.P. The Integration of Lidar and Legacy Datasets Provides Improved Explanations for the Spatial Patterning of Shell Rings in the American Southeast. Adv. Archaeol. Pract. 2020, 8, 361–375. [Google Scholar] [CrossRef]
- Cerrillo-Cuenca, E.; Bueno-Ramírez, P. Counting with the Invisible Record? The Role of LiDAR in the Interpretation of Megalithic Landscapes in South-western Iberia (Extremadura, Alentejo and Beira Baixa). Archaeol. Prospect. 2019, 26, 251–264. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transfer Learning Architecture | Learning Rate | Accuracy | Training Loss | Validation Loss |
|---|---|---|---|---|
| ResNet34 | 8.3 × 10−5 | 59% | 1.7295 | 1.9112 |
| ResNet50 | 6.3 × 10−6 | 63% | 1.8222 | 1.2973 |
| ResNet101 | 0.0001 | 55% | 0.8254 | 1.0824 |
| ResNet152 | 4.8 × 10−5 | 61% | 0.6316 | 0.8489 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davis, D.S.; Lundin, J. Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning. Remote Sens. 2021, 13, 3680. https://doi.org/10.3390/rs13183680
Davis DS, Lundin J. Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning. Remote Sensing. 2021; 13(18):3680. https://doi.org/10.3390/rs13183680
Chicago/Turabian StyleDavis, Dylan S., and Julius Lundin. 2021. "Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning" Remote Sensing 13, no. 18: 3680. https://doi.org/10.3390/rs13183680