Evaluating Landfast Sea Ice Ridging near UtqiaġVik Alaska Using TanDEM-X Interferometry

 , ,
, ,
Abstract
:1. Introduction
2. Data
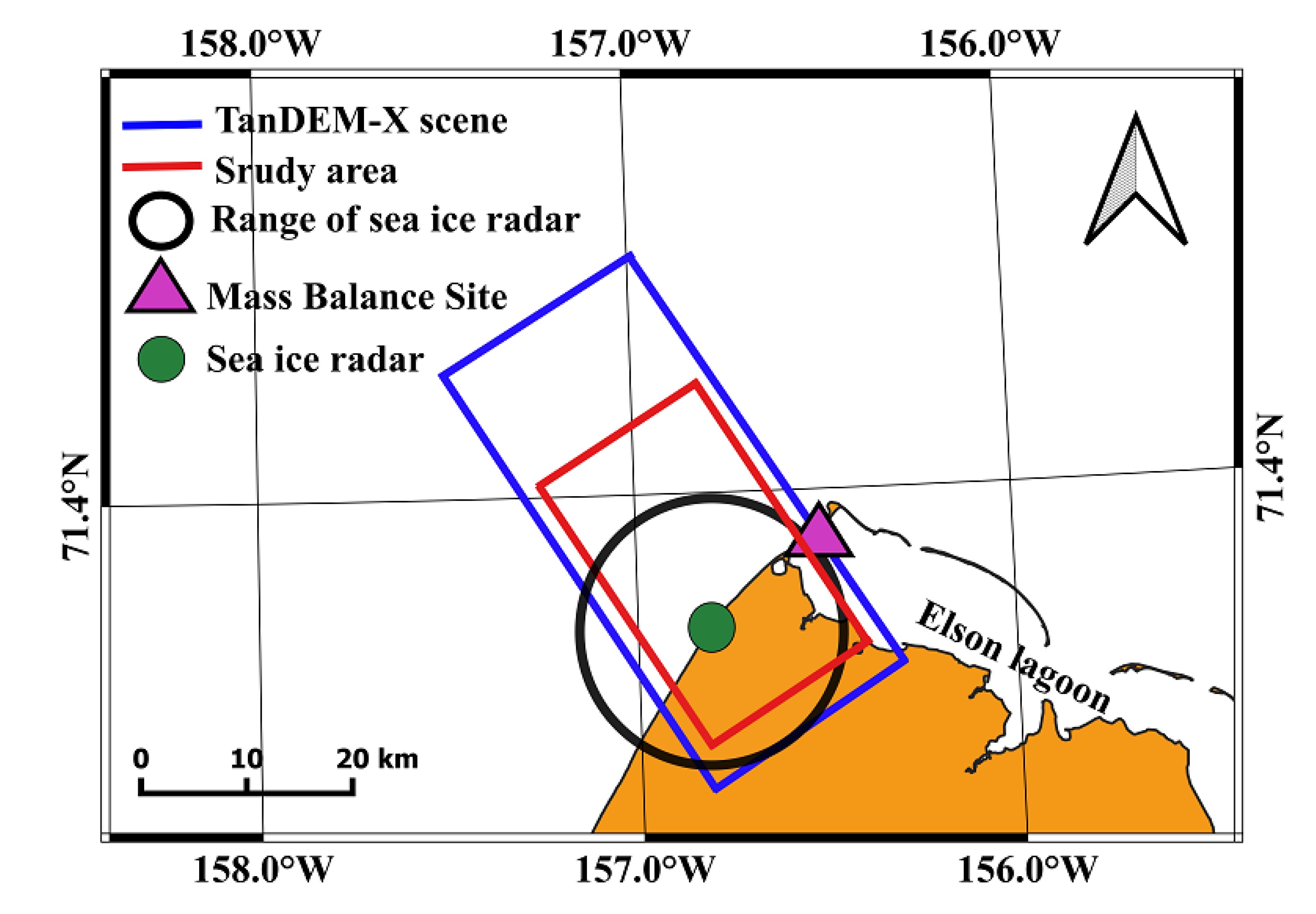
2.1. Study Site and Local Data and Conditions
2.2. TanDEM-X Data
3. Methods
3.1. InSAR Concept
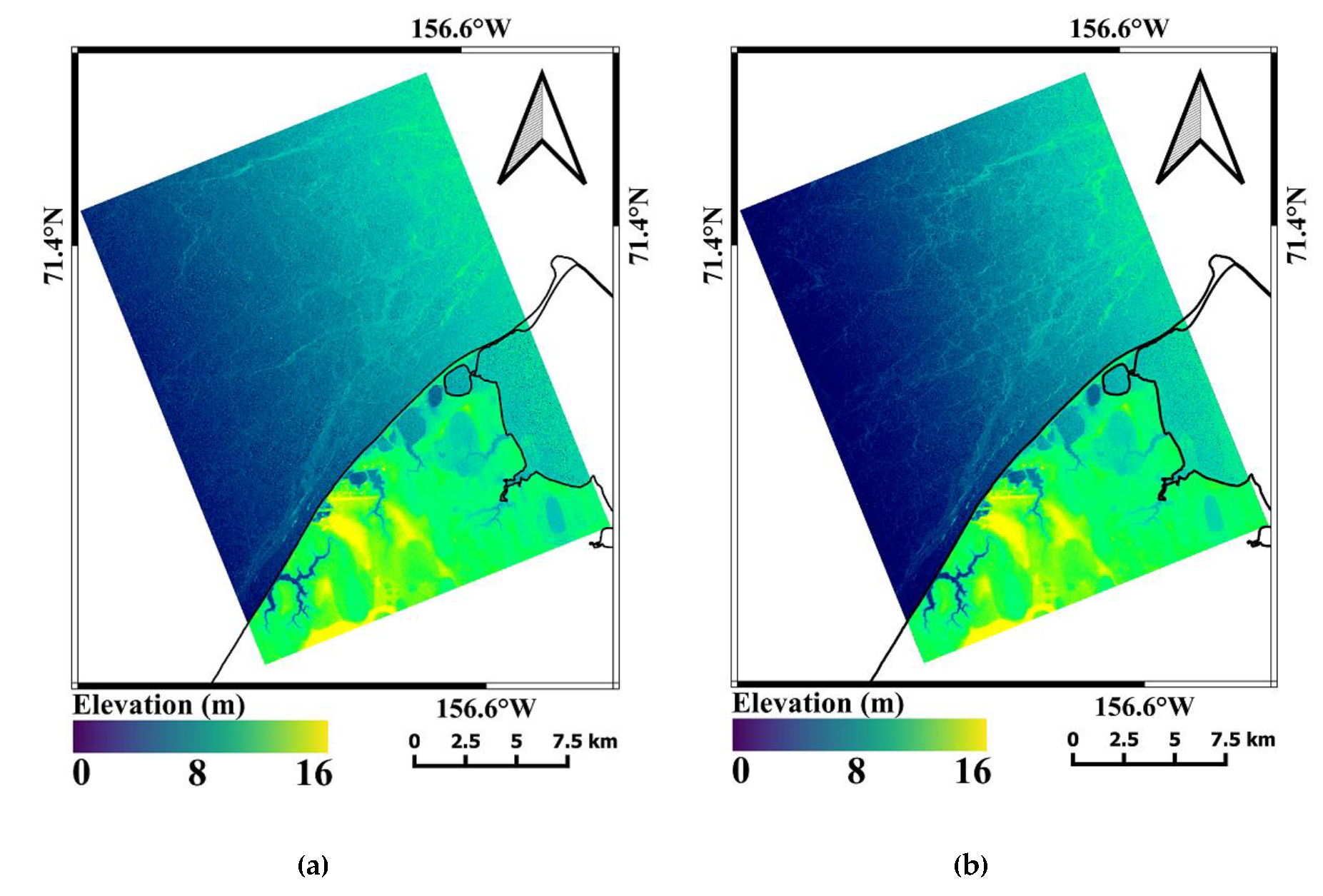
3.2. Generation of a Height Difference Map (HDM)
- Time period of active landfast ice deformation and ridging.
- Bistatic acquisitions resulting in a short (~10 ms) temporal baseline reducing to a minimum.
- Temperatures consistently below 0 °C to avoid surface change and coherence loss due to melt.
- A small HOA resulting in significant height sensitivity and a topographic signal exceeding that of the noise floor.
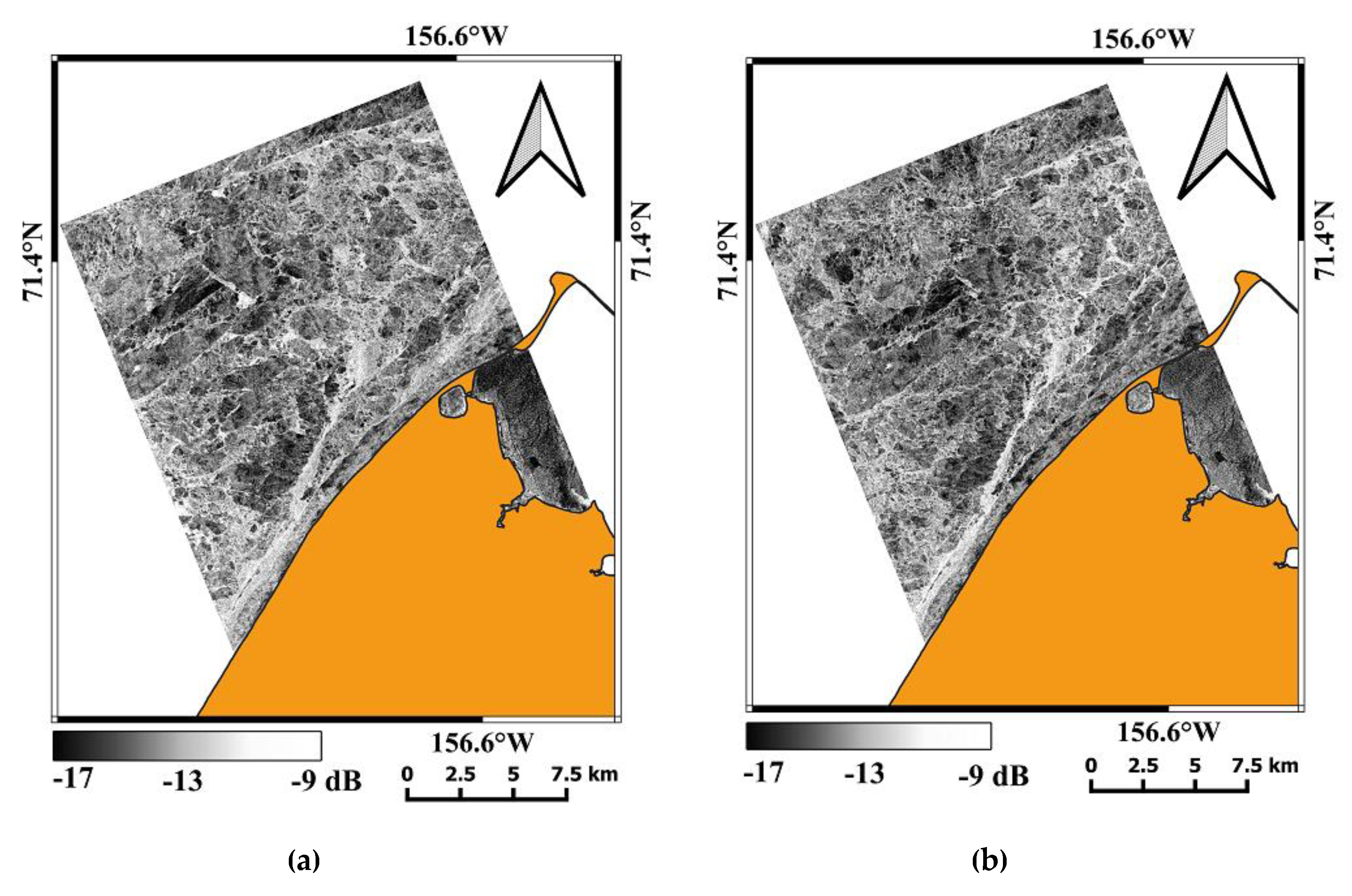
3.3. Backscatter Intensity
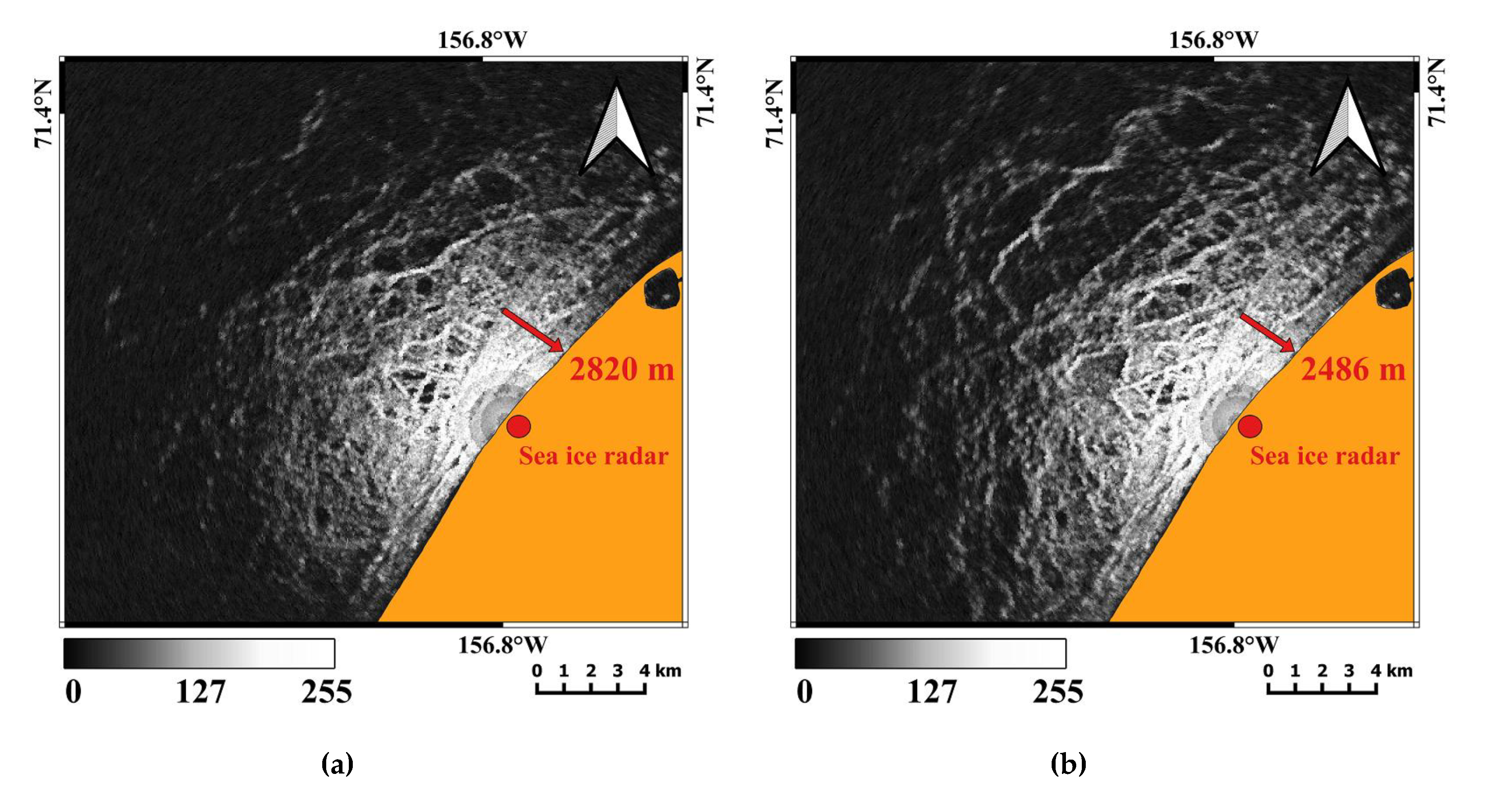
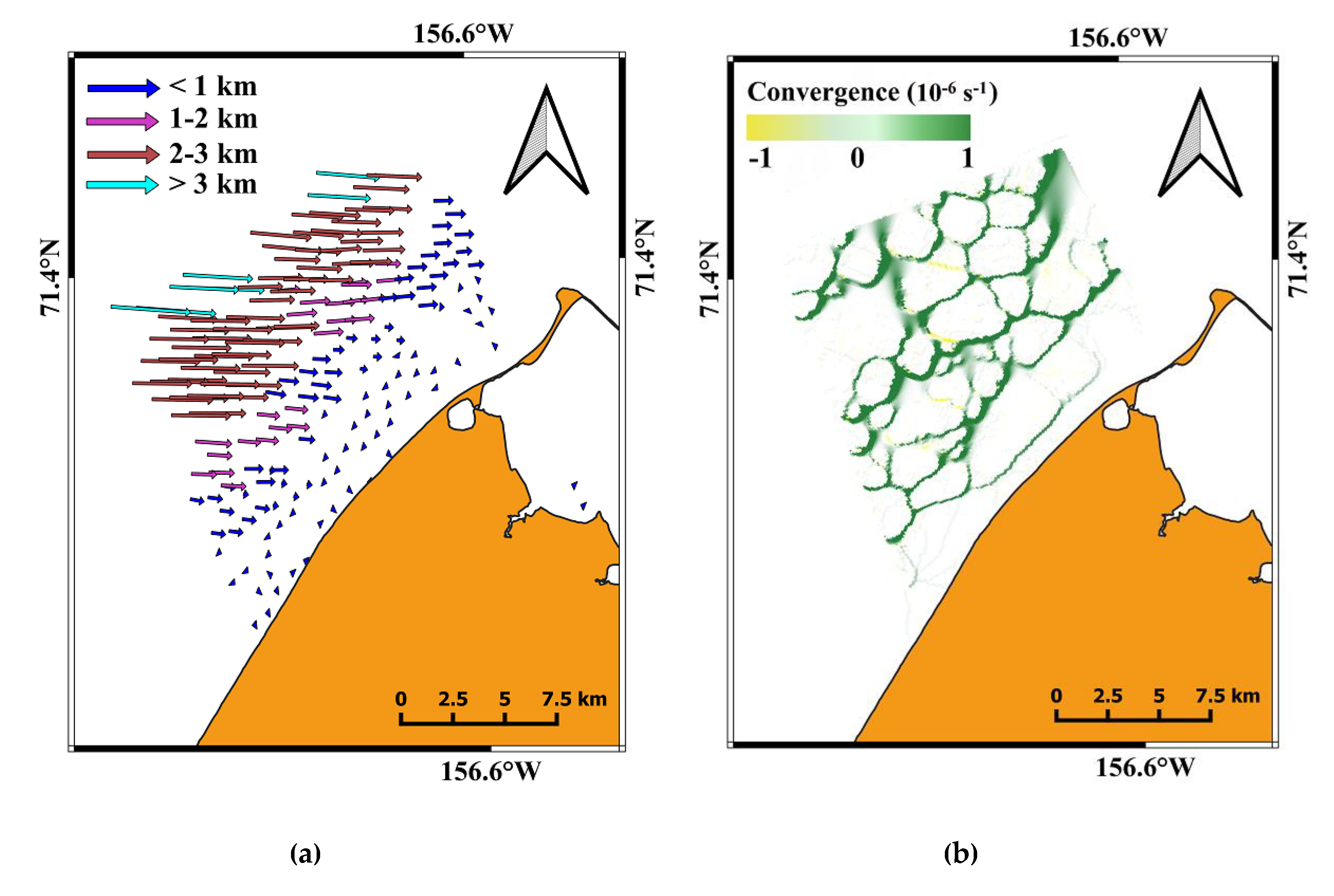
3.4. Sea Ice Drift Estimation
4. Results
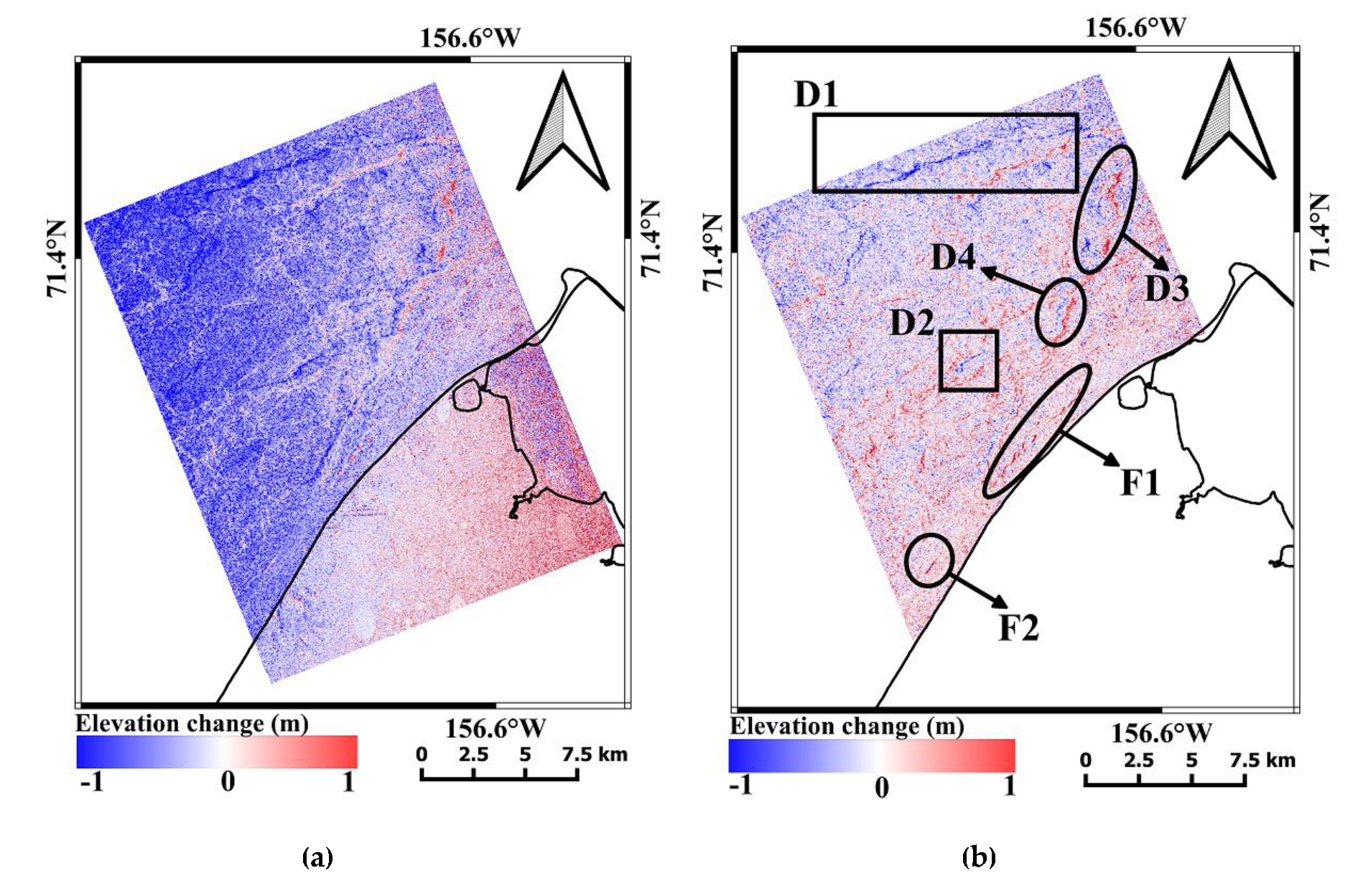
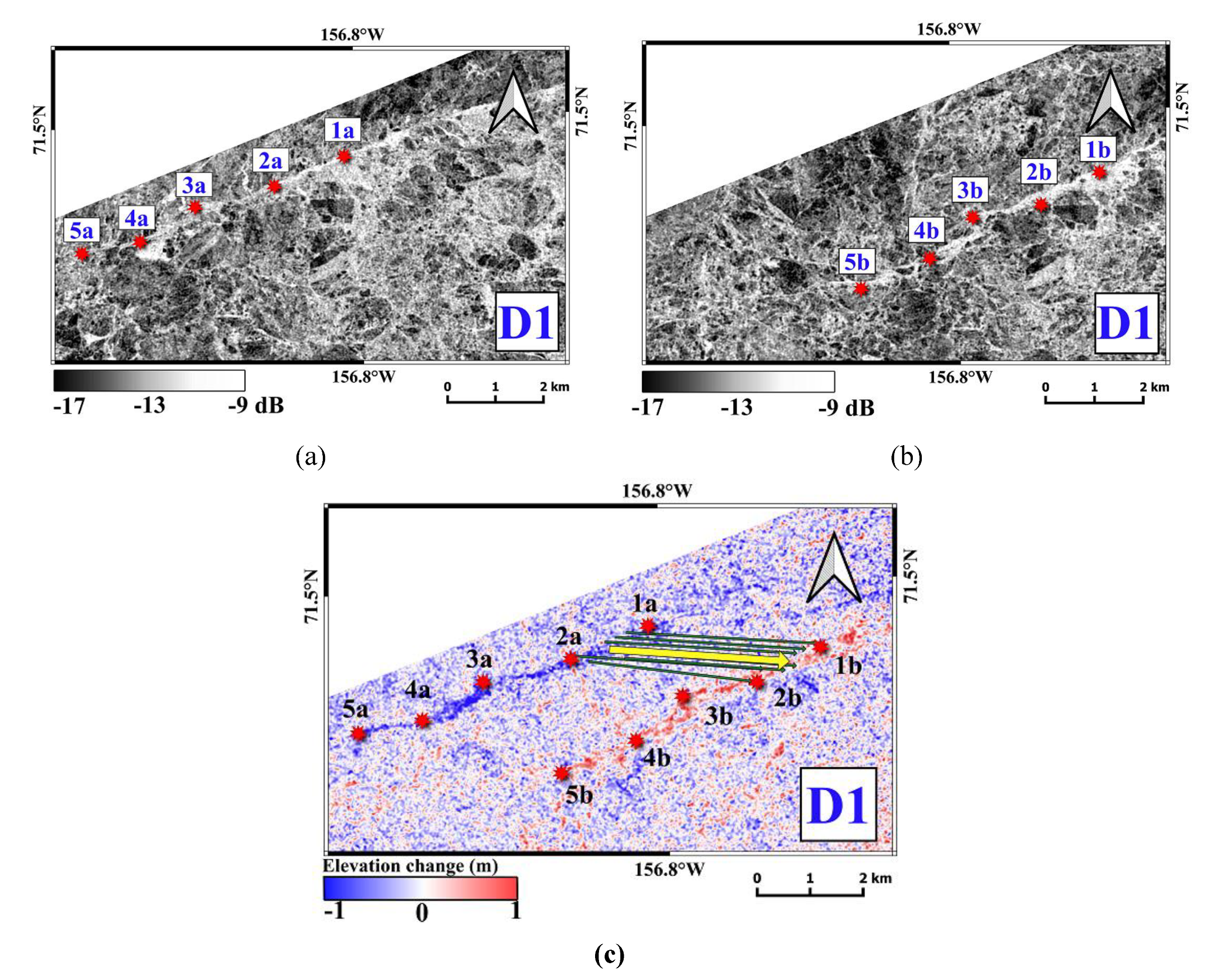
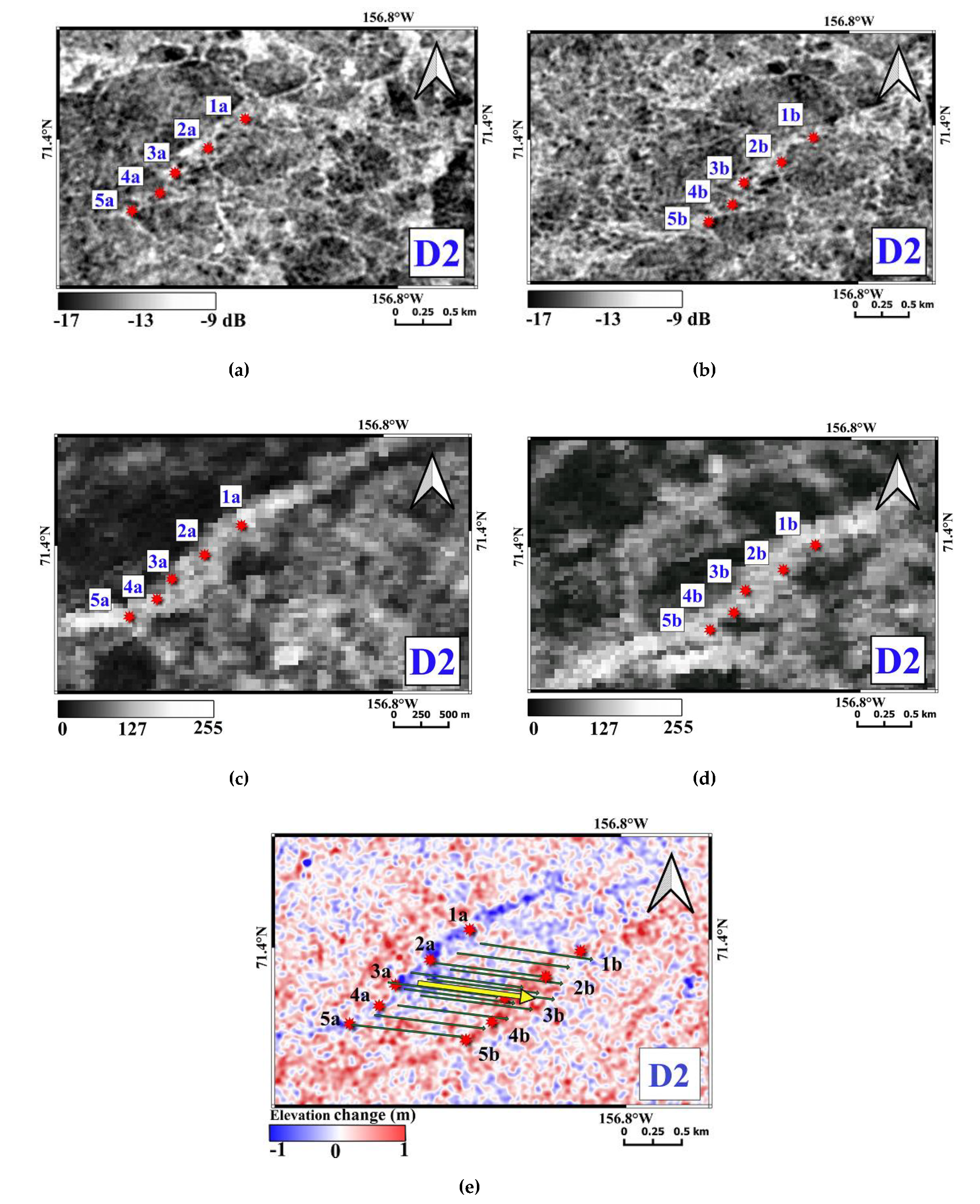
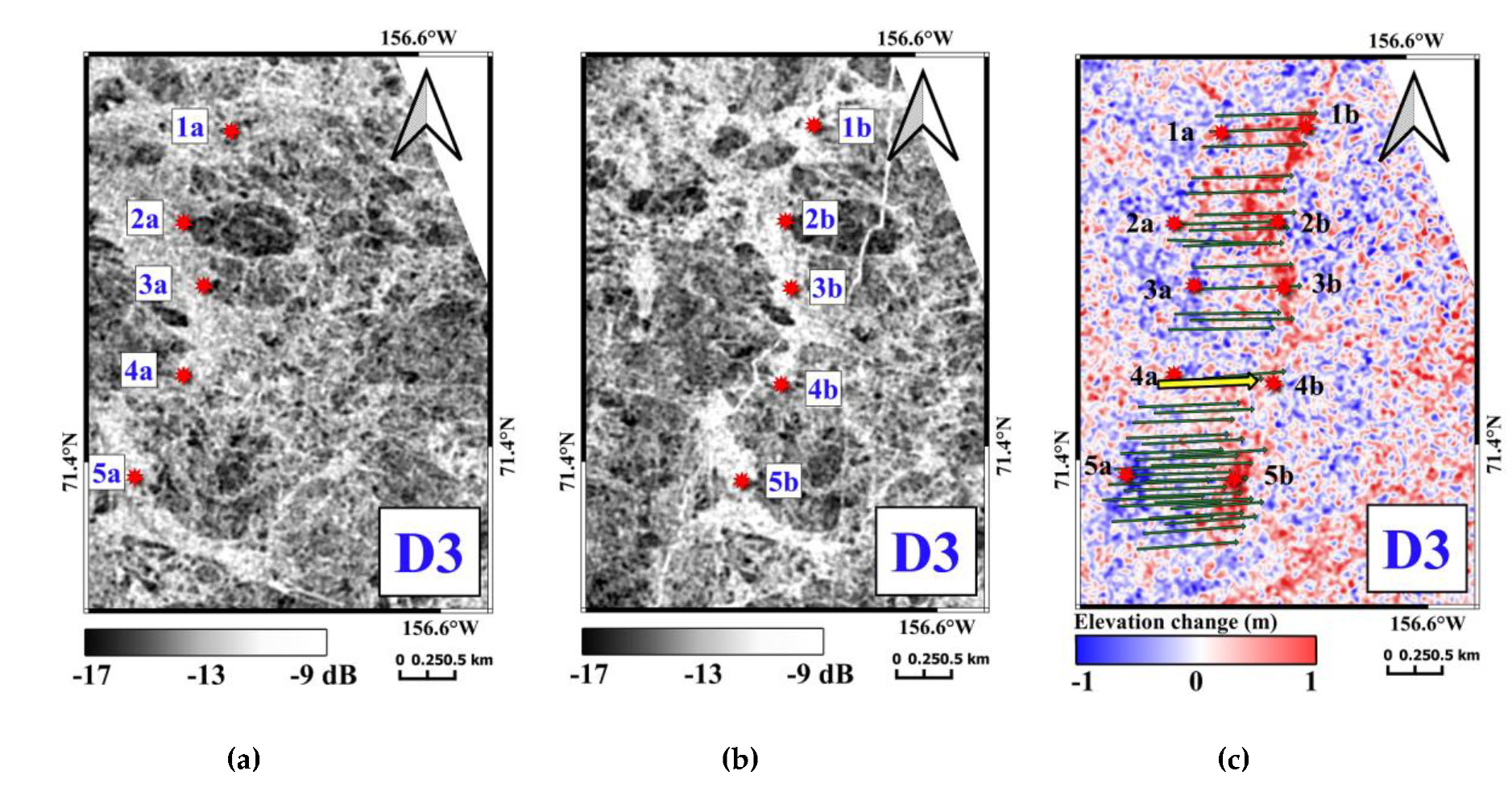
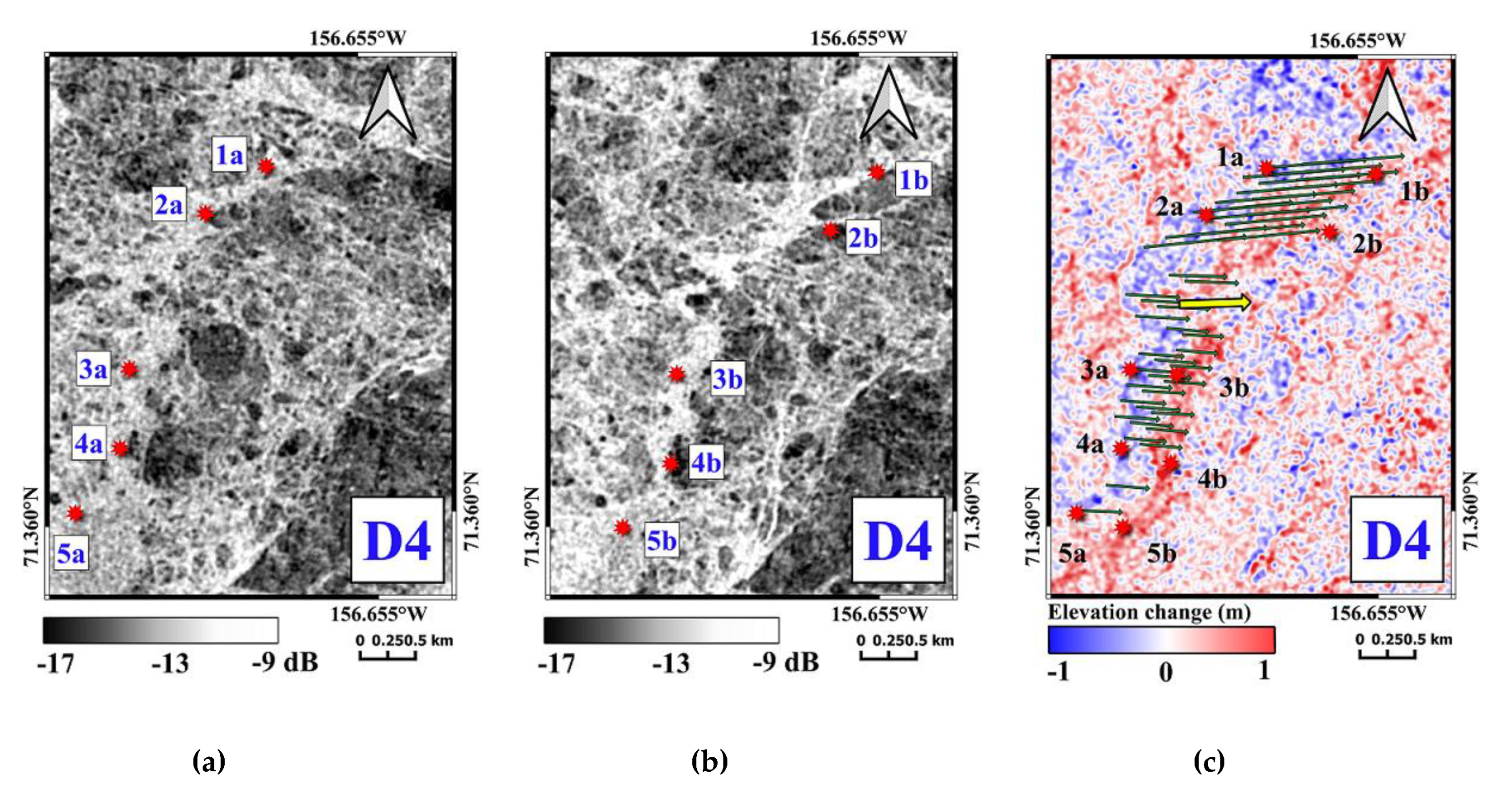
4.1. Detection of Ridge Displacement
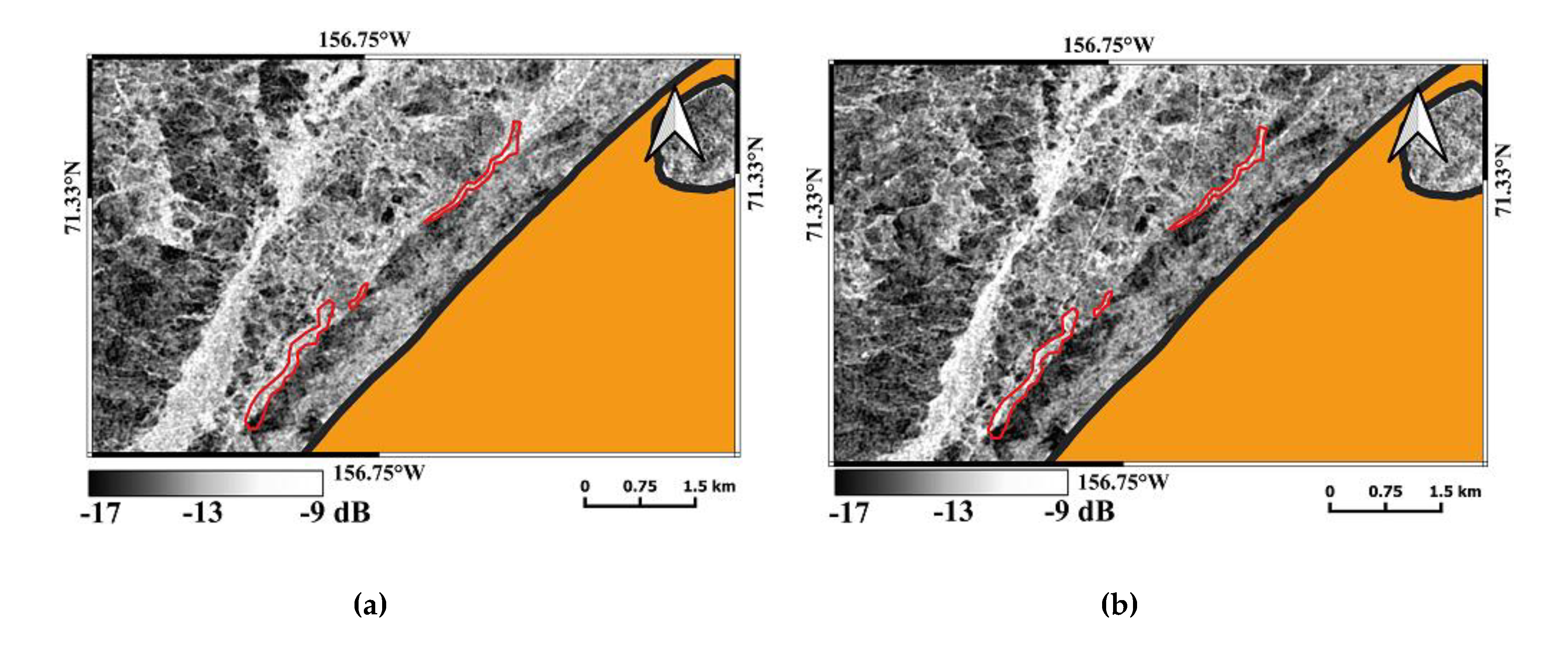
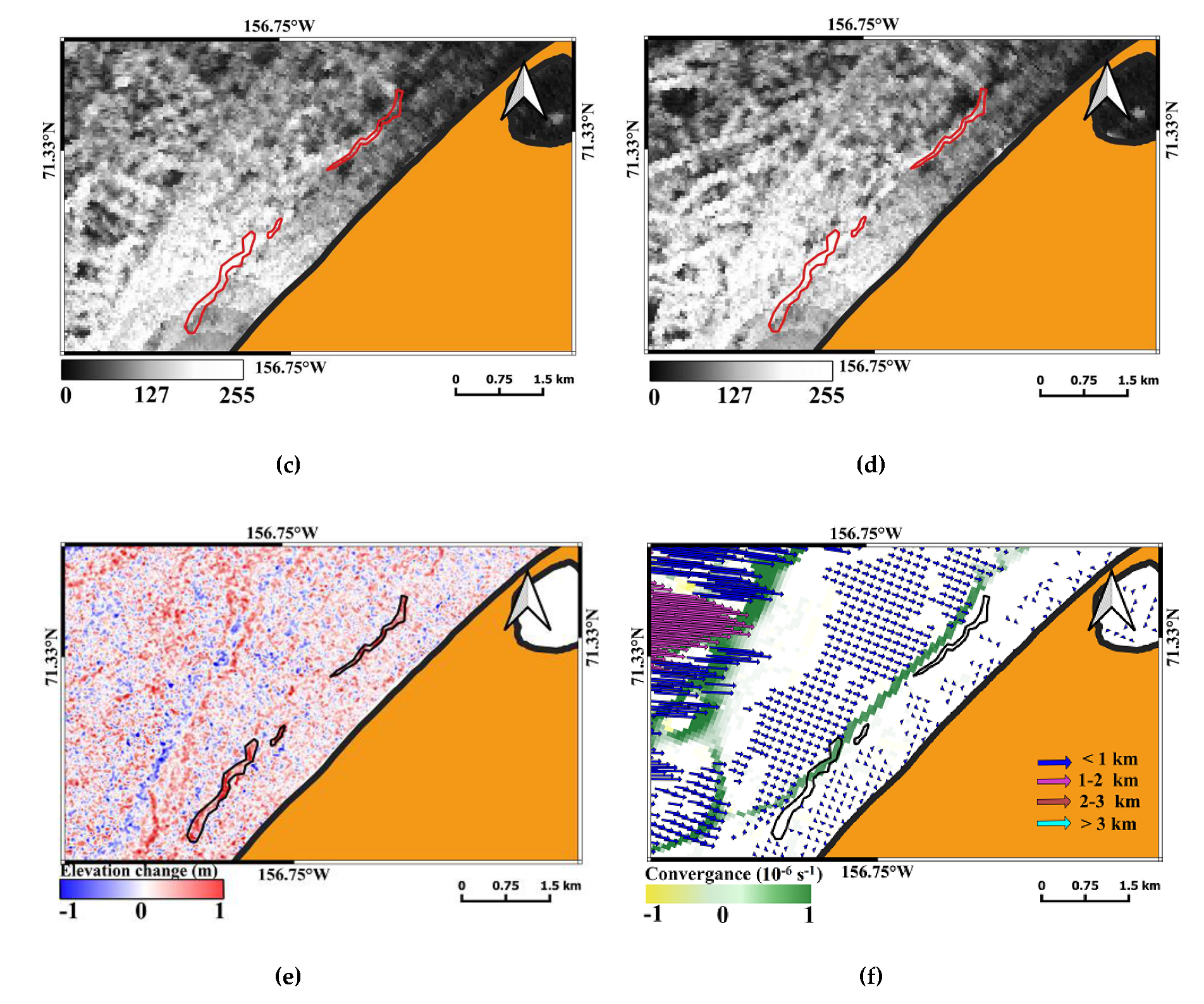
4.2. Detection of Ridge Formation
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eicken, H.; Lovecraft, A.L.; Druckenmiller, M.L. Sea-ice system services: A framework to help identify and meet information needs relevant for Arctic observing networks. Arctic 2009, 62, 119–136. [Google Scholar] [CrossRef] [Green Version]
- Dammann, D.O.; Eicken, H.; Mahoney, A.; Meyer, F.; Betcher, S. Assessing sea ice trafficability in a changing Arctic. Arctic 2018, 71, 59–75. [Google Scholar] [CrossRef]
- Reimnitz, E.; Dethleff, D.; Nürnberg, D. Contrasts in Arctic shelf sea-ice regimes and some implications: Beaufort Sea vs Laptev Sea. Mar. Geol. 1994, 119, 215–225. [Google Scholar] [CrossRef]
- Reimnitz, E.; Maurer, D. Effects of storm surges on the Beaufort Sea Coast, Northern Alaska. Arctic 1979, 32, 329–344. [Google Scholar] [CrossRef] [Green Version]
- Wilson, K.; Falkingham, J.; Melling, H.; De Abreu, R. Shipping in the Canadian Arctic-other possible climate scenarios. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004. [Google Scholar]
- Divine, D.; Korsnes, R.; Makshtas, A. Temporal and spatial variation of shorefast ice in the Kara Sea. Cont. Shelf. Res. 2004, 24, 1717–1736. [Google Scholar] [CrossRef]
- Eicken, H.; Dmitrenko, I.; Tyshko, K.; Darovskikh, A.; Dierking, W.; Blahak, U.; Groves, J.; Kassens, H. Zonation of the Laptev Sea landfast ice cover and its importance in a frozen estuary. Global Planet. Chang. 2004, 48, 55–83. [Google Scholar] [CrossRef]
- Jones, J.; Eicken, H.; Mahoney, A.; MV, R.; Kambhamettu, C.; Fukamachi, Y.; Ohshima, K.; George, J.C. Landfast sea ice breakouts: Stabilizing ice features, oceanic and atmospheric forcing at Barrow, Alaska. Cont. Shelf. Res. 2016, 126, 50–63. [Google Scholar] [CrossRef] [Green Version]
- Zubov, N.N. Arctic Sea Ice; English Translation 1963 from Russian Language by U.S.; Naval Oceanographic Office and American Meteorological Society: San Diego, CA, USA, 1945; p. 491. [Google Scholar]
- Mahoney, A.; Eicken, H.; Gaylord, A.G.; Gens, R. Landfast sea ice extent in the Chukchi and Beaufort Seas: The annual cycle and decadal variability. Cold Reg. Sci. Technol. 2014, 103, 41–56. [Google Scholar] [CrossRef]
- Mahoney, A.; Eicken, H.; Graves-Gaylord, A.; Shapiro, L. Alaska landfast sea ice: Links with bathymetry and atmospheric circulation. J. Geophys. Res. 2007, 112, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Gearheard, S.; Matumeak, W.; Angutikjuaq, I.; Maslanik, J.; Huntington, H.; Leavitt, J.; Kagak, D.M.; Tigullaraq, G.; Barry, R. “It’s not that simple”: A collaborative comparison of sea ice environments, their uses, observed changes, and adaptations in Barrow, Alaska, USA, and Clyde River, Nunavut, Canada. AMBIO A J. Hum. Environ. 2006, 35, 203–211. [Google Scholar] [CrossRef]
- George, J.C.; Huntington, H.; Brewster, K.; Eicken, H.; Norton, D.; Glenn, R. Observation on shorefast ice dynamics in northern Alaska and the responses of the Iñupiat hunting community. Arctic 2004, 57, 363–374. [Google Scholar] [CrossRef]
- George, J.C.; Zeh, J.; Suydam, R.; Clark, C. Abundance and population trend (1978–2001) of western arctic bowhead whales surveyed near Barrow, Alaska. Mar. Mamm. Sci. 2006, 20, 755–773. [Google Scholar] [CrossRef]
- Sonnenfeld, J. Changes in Subsistence Among the Barrow Eskimo. Ann. Assoc. Am. Geogr. 1960, 50, 172–186. [Google Scholar] [CrossRef]
- Mahoney, A.; Eicken, H.; Shapiro, L. How fast is landfast sea ice? A study of the attachment and detachment of nearshore ice at Barrow, Alaska. Cold Reg. Sci. Technol. 2007, 47, 233–255. [Google Scholar] [CrossRef]
- Druckenmiller, M.L. Alaska Shorefast Ice: Interfacing Geophysics with Local Sea Ice Knowledge and Use. Ph.D. Thesis, University of Alaska Fairbanks, Fairbanks, AK, USA, 2011. [Google Scholar]
- Dammann, D.O.; Eriksson, L.E.B.; Mahoney, A.R.; Eicken, H.; Meyer, F.J. Mapping pan-Arctic landfast sea ice stability using Sentinel-1 interferometry. Cryosphere 2019, 13, 557–577. [Google Scholar] [CrossRef] [Green Version]
- Barker, A.; Timco, G.; Wright, B. Traversing grounded rubble fields by foot—Implications for evacuation. Cold Reg. Sci. Technol. 2006, 46, 79–99. [Google Scholar] [CrossRef]
- Dammann, D.O.; Eicken, H.; Mahoney, A.R.; Saiet, E.; Meyer, F.J.; George, J.C. Traversing Sea Ice—Linking Surface Roughness and Ice Trafficability Through SAR Polarimetry and Interferometry. IEEE J. Sel. Top. Appl. 2018, 11, 416–433. [Google Scholar] [CrossRef]
- Druckenmiller, M.L.; Eicken, H.; George, J.C.; Brower, L. Trails to the whale: Reflections of change and choice on an Iñupiat icescape at Barrow, Alaska. Polar Geogr. 2013, 36, 5–29. [Google Scholar] [CrossRef]
- Dierking, W. Laser profiling of the ice surface topography during the Winter Weddell Gyre Study. J. Geophys. Res. Oceans 1992, 100, 4807–4820. [Google Scholar] [CrossRef]
- Farrell, S.L.; Markus, T.; Kwok, R.; Connor, L. Laser altimetry sampling strategies over sea ice. Ann. Glaciol. 2011, 52, 69–76. [Google Scholar] [CrossRef] [Green Version]
- Kwok, R.; Zwally, H.J.; Yi, D. ICESat observations of Arctic sea ice: A first look. Geophysical. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Dammert, P.B.G.; Lepparanta, M.; Askne, J. SAR interferometry over Baltic Sea ice. Int. J. Remote Sens. 1998, 19, 3019–3037. [Google Scholar] [CrossRef]
- Meyer, F.J.; Mahoney, A.R.; Eicken, H.; Denny, C.L.; Druckenmiller, H.C.; Hendricks, S. Mapping arctic landfast ice extent using L-band synthetic aperture radar interferometry. Remote Sens. Environ. 2011, 115, 3029–3043. [Google Scholar] [CrossRef]
- Dammann, D.O.; Eicken, H.; Meyer, F.; Mahoney, A. Assessing small-scale deformation and stability of landfast sea ice on seasonal timescales through L-band SAR interferometry and inverse modeling. Remote Sens. Environ. 2016, 187, 492–504. [Google Scholar] [CrossRef] [Green Version]
- Dammann, D.O.; Eicken, H.; Mahoney, A.; Meyer, F.; Freymueller, J.; Kaufman, A.M. Assessing landfast sea ice stability and internal ice stress around ice roads using L-band SAR interferometry and inverse modeling. Cold. Reg. Sci. Technol. 2018, 149, 51–64. [Google Scholar] [CrossRef]
- Dammann, D.O.; Eicken, H.; Mahoney, A.; Meyer, F.; Eriksson, L.; Saiet, E.; Freymueller, J.; Jones, J. New Possibilities Using TSX and TDX in Support of Sea Ice Use. In Proceedings of the European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018. [Google Scholar]
- Mahoney, A.R.; Dammann, D.O.; Johnson, M.A.; Eicken, H.; Meyer, F.J. Measurement and imaging of infragravity waves in sea ice using InSAR. Geophys. Res. Lett. 2016, 43, 6383–6392. [Google Scholar] [CrossRef] [Green Version]
- Dierking, W.; Lang, O.; Busche, T. Sea ice local surface topography from single-pass satellite InSAR measurements: A feasibility study. Cryosphere 2017, 11, 1967–1985. [Google Scholar] [CrossRef] [Green Version]
- Yitayew, T.; Dierking, V.; Divine, D.V.; Eltoft, T.; Ferro-Famil, L.; Rösel, A.; Negrel, J. Validation of Sea-Ice Topographic Heights Derived From TanDEM-X Interferometric SAR Data With Results From Laser Profiler and Photogrammetry. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6504–6520. [Google Scholar] [CrossRef]
- Dammann, D.O.; Eriksson, L.E.; Jones, J.M.; Mahoney, A.R.; Romeiser, R.; Meyer, F.J.; Eicken, H.; Fukamachi, Y. Instantaneous sea ice drift speed from TanDEM-X interferometry. Cryosphere 2019, 13, 1395–1408. [Google Scholar] [CrossRef]
- Dammann, D.O.; Eriksson, L.E.B.; Nghiem, S.V.; Pettit, E.C.; Kurtz, N.T.; Sonntag, J.G.; Busche, T.E.; Meyer, F.J.; Mahoney, A.R. Iceberg topography and volume classification using TanDEM-X interferometry. Cryosphere 2019, 13, 1861–1875. [Google Scholar] [CrossRef] [Green Version]
- Berg, A.; Eriksson, L.E. Investigation of a hybrid algorithm for sea ice drift measurements using synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5023–5033. [Google Scholar] [CrossRef] [Green Version]
- Mahoney, A.R.; Eicken, H.; Fukamachi, Y.; Ohshima, K.I.; Simizu, D.; Kambhamettu, C.; Rohith, M.; Hendricks, S.; Jones, J. Taking a look at both sides of the ice: Comparison of ice thickness and drift speed as observed from moored, airborne and shore-based instruments near Barrow, Alaska. Ann. Glaciol. 2015, 56, 363–372. [Google Scholar] [CrossRef] [Green Version]
- Rohith, M.; Jones, J.; Eicken, H.; Kambhamettu, C. Extracting Quantitative Information on Coastal Ice Dynamics and Ice Hazard Events from Marine Radar Digital Imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2556–2570. [Google Scholar]
- Jones, J.M. Landfast Sea Ice Formation and Deformation Near Barrow. Master’s Thesis, University of Alaska Fairbanks, Fairbanks, AK, USA, 2013. [Google Scholar]
- Druckenmiller, M.L.; Eicken, H.; Johnson, M.A.; Pringle, D.J.; Williams, C.C. Toward an integrated coastal sea-ice observatory: System components and a case study at Barrow, Alaska. Cold Reg. Sci. Technol. 2009, 56, 61–72. [Google Scholar] [CrossRef]
- Maurer, E.; Kahle, R.; Mrowka, F.; Ohndorf, A.; Zimmermann, S. Operational aspects of the TanDEM-X Science Phase. In Proceedings of the 14th International Conference on Space Operations, Daejeon, Korea, 16–20 May 2016. [Google Scholar] [CrossRef] [Green Version]
- Krieger, G.; Moreira, A.; Fielder, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. IEEE Trans. Geosci. Remote. Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE. 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Elyouncha, A.; Eriksson, L.E.B.; Romeiser, R.; Ulander, L.M.H. Measurements of Sea Surface Currents in the Baltic Sea Region Using Spaceborne Along-Track InSAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8584–8599. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Sadeghi, Y.; St-Onge, B.; Leblon, B.; Simard, M.; Papathanassiou, K. Mapping forest canopy height using TanDEM-X DSM and airborne LiDAR DTM. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar] [CrossRef]
- Solberg, S.; Astrup, R.; Breidenbach, J.; Nilsen, B.; Weydahl, D. Monitoring spruce volume and biomass with InSAR data from TanDEM-X. Remote Sens. Environ. 2013, 139, 60–67. [Google Scholar] [CrossRef]
- Solberg, S.; Weydahl, D.J.; Astrup, R. Temporal Stability of X-Band Single-Pass InSAR Heights in a Spruce Forest: Effects of Acquisition Properties and Season. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1607–1614. [Google Scholar] [CrossRef]
- Onstott, R.G. SAR and scatterometer signatures of sea ice, chapter 5. In Microwave Remote Sensing of Sea Ice, 2nd ed.; Carsey, F.D., Ed.; American Geophysical Union: Washington, DC, USA, 1992; Volume 68, pp. 77–104. [Google Scholar] [CrossRef]
- Griebel, J.; Dierking, W. A Method to Improve High-Resolution Sea Ice Drift Retrievals in the Presence of Deformation Zones. Remote Sens. 2017, 9, 718. [Google Scholar] [CrossRef] [Green Version]
- Muckenhuber, S.; Korosov, A.A.; Sandven, S. Open-source feature-tracking algorithm for sea ice drift retrieval from Sentinel-1 SAR imagery. Cryosphere 2016, 10, 913–925. [Google Scholar] [CrossRef] [Green Version]
- Demchev, D.; Volkov, V.; Kazakov, E.; Alcantarilla, P.F.; Sandven, S.; Khmeleva, V. Sea Ice Drift Tracking From Sequential SAR Images Using Accelerated-KAZE Features. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5174–5184. [Google Scholar] [CrossRef]
- Lindsay, R.W.; Stern, H.L. The RADARSAT geophysical processor system: Quality of sea ice trajectory and deformation estimates. J. Atmos. Ocean. Tech. 2003, 20, 1333–1347. [Google Scholar] [CrossRef] [Green Version]
- Marbouti, M.; Praks, J.; Antropov, O.; Rinne, E.; Leppäranta, M. A study of landfast ice with Sentinel-1 repeat-pass interferometry over the Baltic Sea. Remote Sens. 2017, 9, 833. [Google Scholar] [CrossRef] [Green Version]
- Berg, A.; Dammert, P.; Eriksson, L.E.B. X-Band Interferometric SAR Observations of Baltic Fast Ice. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1248–1256. [Google Scholar] [CrossRef] [Green Version]
- Dammann, D.O.; Eriksson, L.B.; Mahoney, A.R.; Stevens, C.W.; Sanden, J.; Eicken, H.; Meyer, F.J.; Tweedie, C.E. Mapping Arctic Bottomfast Sea Ice Using SAR Interferometry. Remote Sens. 2017, 10, 720. [Google Scholar] [CrossRef] [Green Version]
- Dierking, W.; Dall, J. Sea-Ice Deformation State from Synthetic Aperture Radar Imagery—Part I: Comparison of C- and L-Band and Different Polarization. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3610–3622. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | 13 Jan 2012 | 24 Jan 2012 |
|---|---|---|
| Acquisition start time (UTC) | 03:18:42.245 | 3:18:42.032 |
| Orbit cycle | 153 | 154 |
| Relative orbit | 16 | 16 |
| Absolute orbit | 25567 | 25734 |
| Effective baseline (m) | 63.37 | 62.19 |
| Along-track baseline (m) | −196.35 | 206.94 |
| Resolution (m) | 3.1342 | 3.1285 |
| Height of ambiguity (m) | −48.98 | 49.98 |
| Average coherence | 0.851 | 0.847 |
| Incident angle (°) | 20.8547 | 20.8497 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marbouti, M.; Eriksson, L.E.B.; Dammann, D.O.; Demchev, D.; Jones, J.; Berg, A.; Antropov, O. Evaluating Landfast Sea Ice Ridging near UtqiaġVik Alaska Using TanDEM-X Interferometry. Remote Sens. 2020, 12, 1247. https://doi.org/10.3390/rs12081247
Marbouti M, Eriksson LEB, Dammann DO, Demchev D, Jones J, Berg A, Antropov O. Evaluating Landfast Sea Ice Ridging near UtqiaġVik Alaska Using TanDEM-X Interferometry. Remote Sensing. 2020; 12(8):1247. https://doi.org/10.3390/rs12081247
Chicago/Turabian StyleMarbouti, Marjan, Leif E. B. Eriksson, Dyre Oliver Dammann, Denis Demchev, Joshua Jones, Anders Berg, and Oleg Antropov. 2020. "Evaluating Landfast Sea Ice Ridging near UtqiaġVik Alaska Using TanDEM-X Interferometry" Remote Sensing 12, no. 8: 1247. https://doi.org/10.3390/rs12081247