Modeling and Evaluation of the Systematic Errors for the Polarization-Sensitive Imaging Lidar Technique


Abstract
:
1. Introduction
2. Principle of the Polarization-Sensitive Imaging Lidar
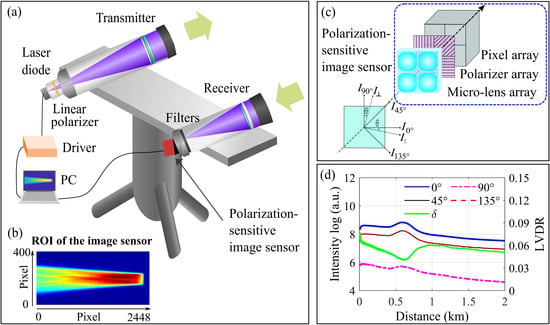
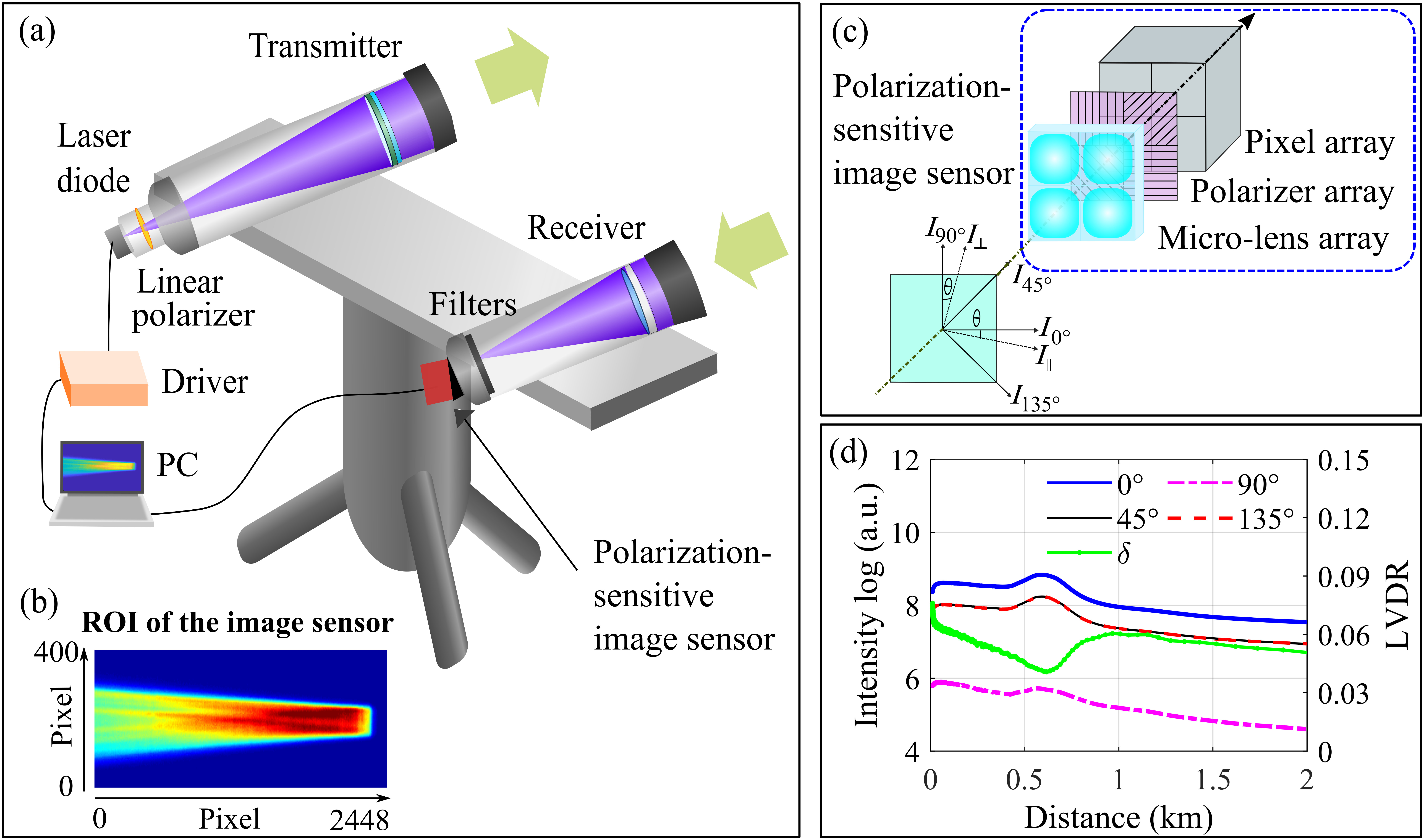
2.1. The Experimental Setup of the PSI-Lidar
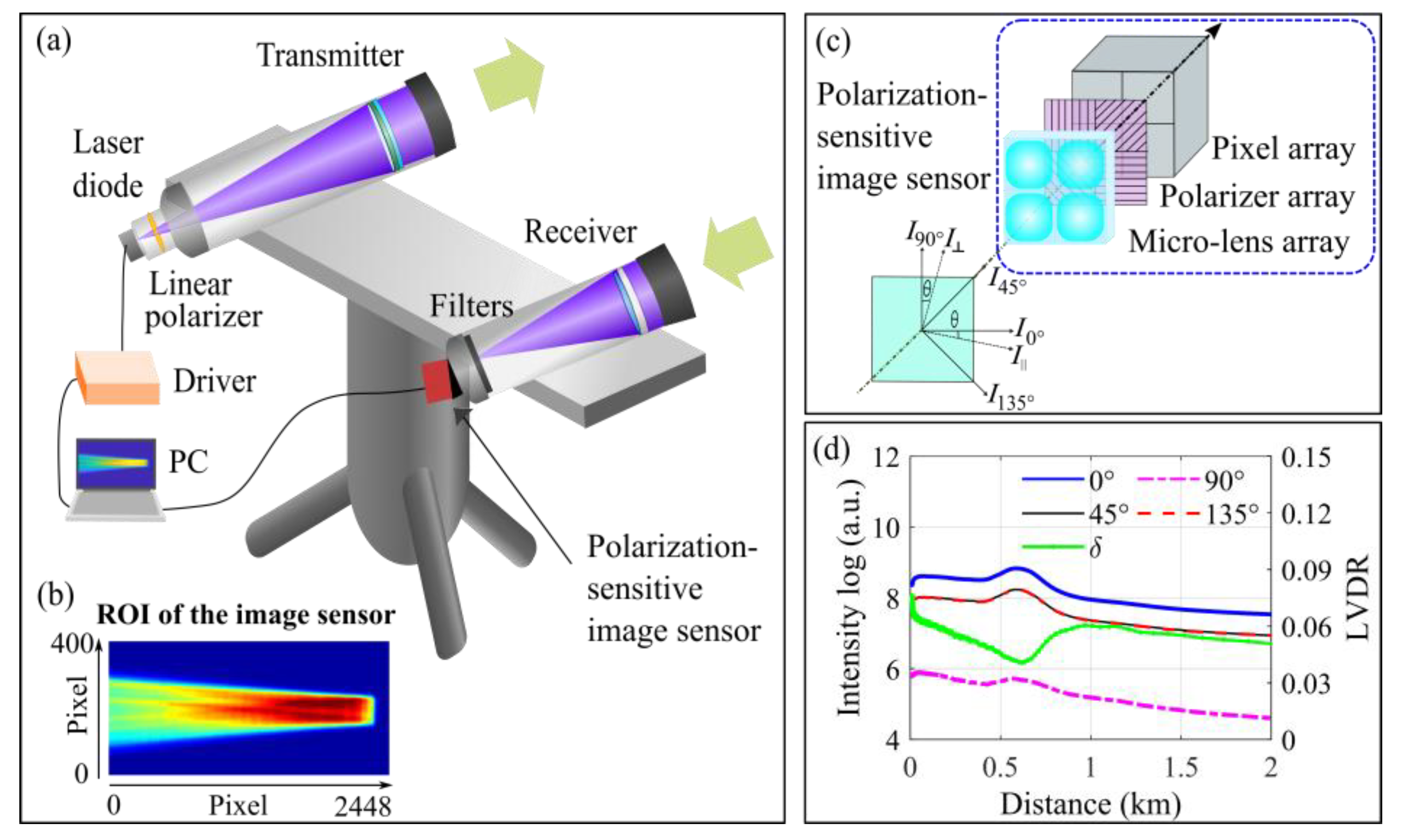
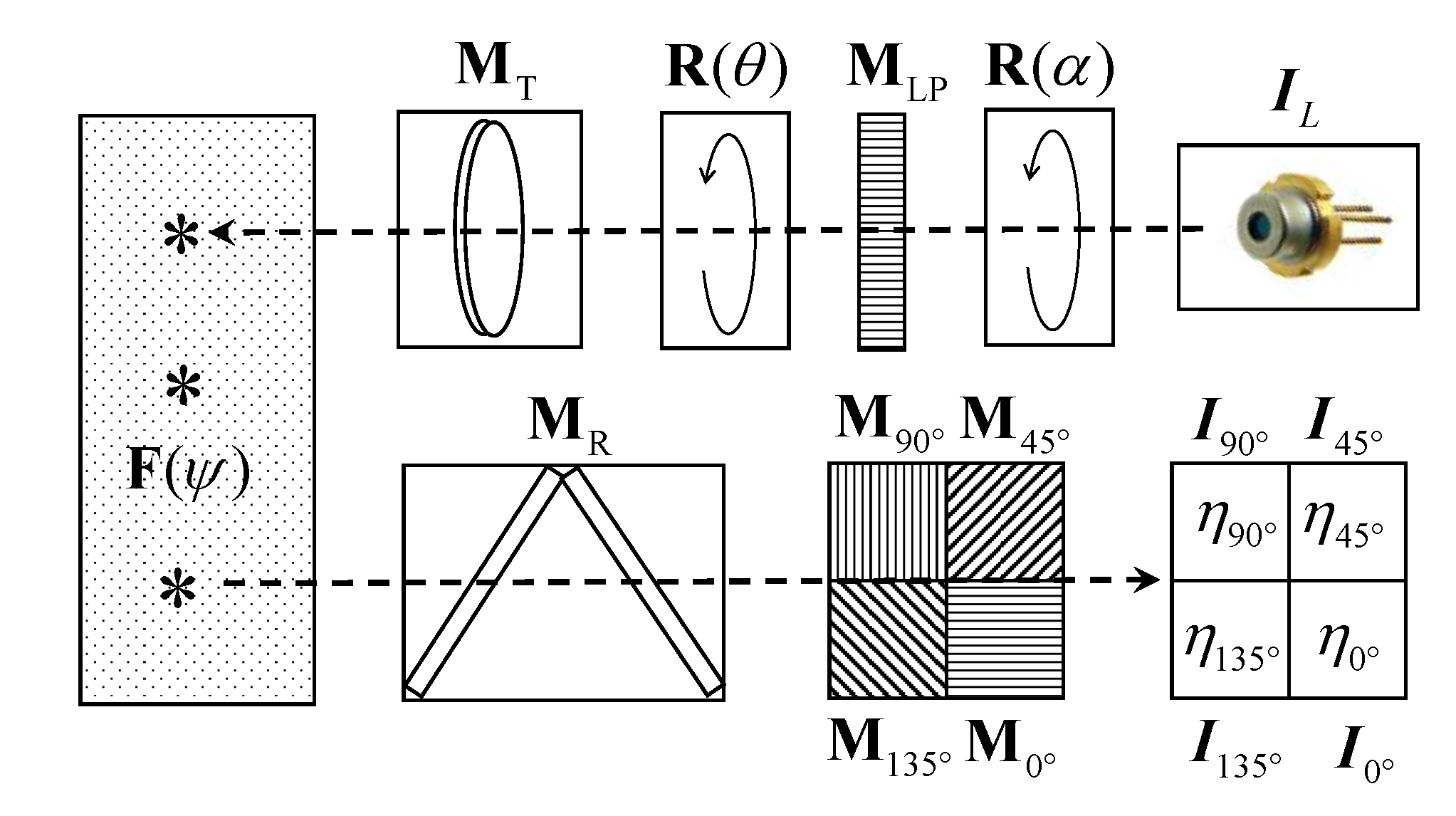
2.2. Theoretical Modeling of the PSI-Lidar
3. Optical Parameters of the PSI-Lidar
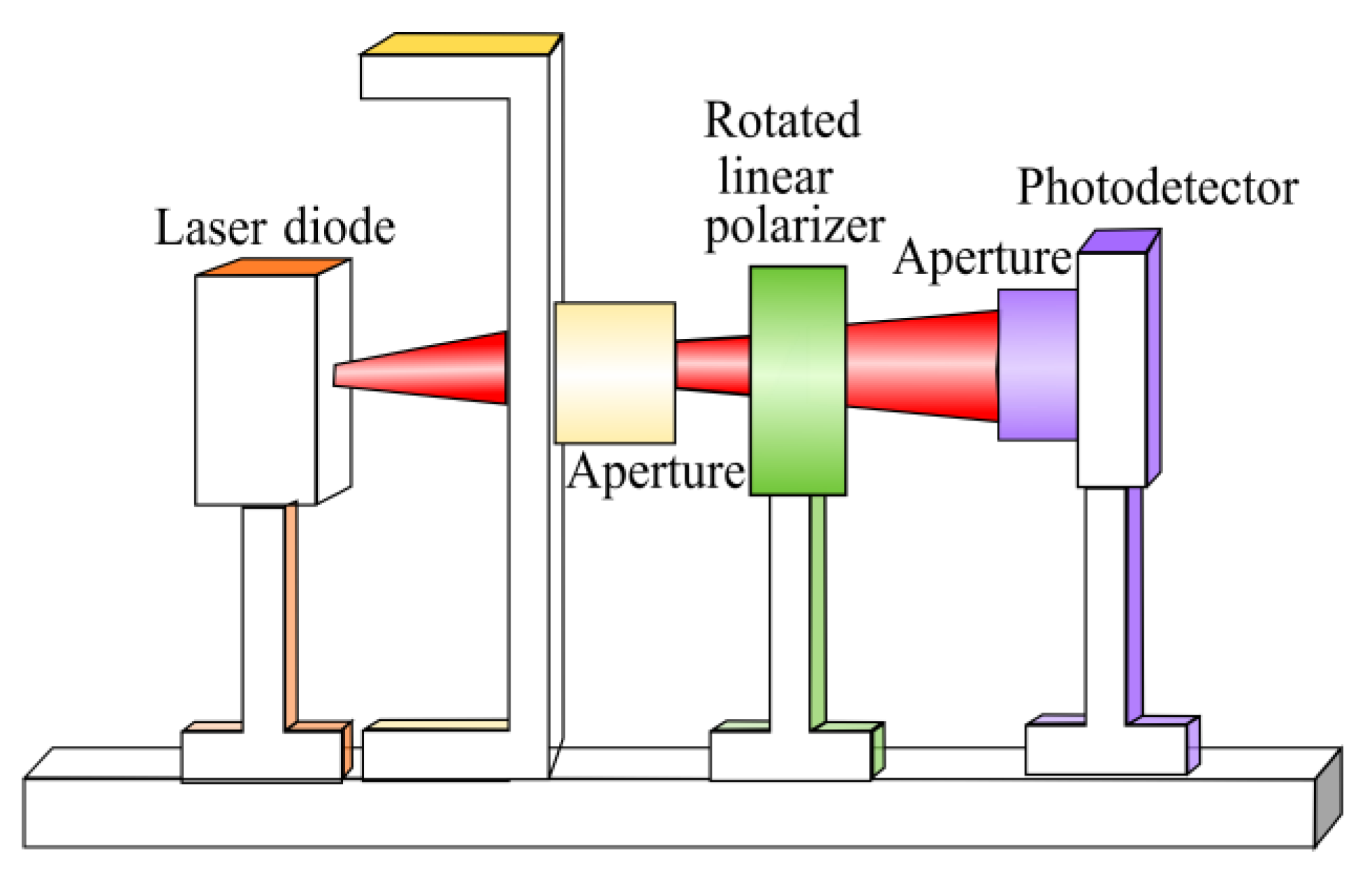
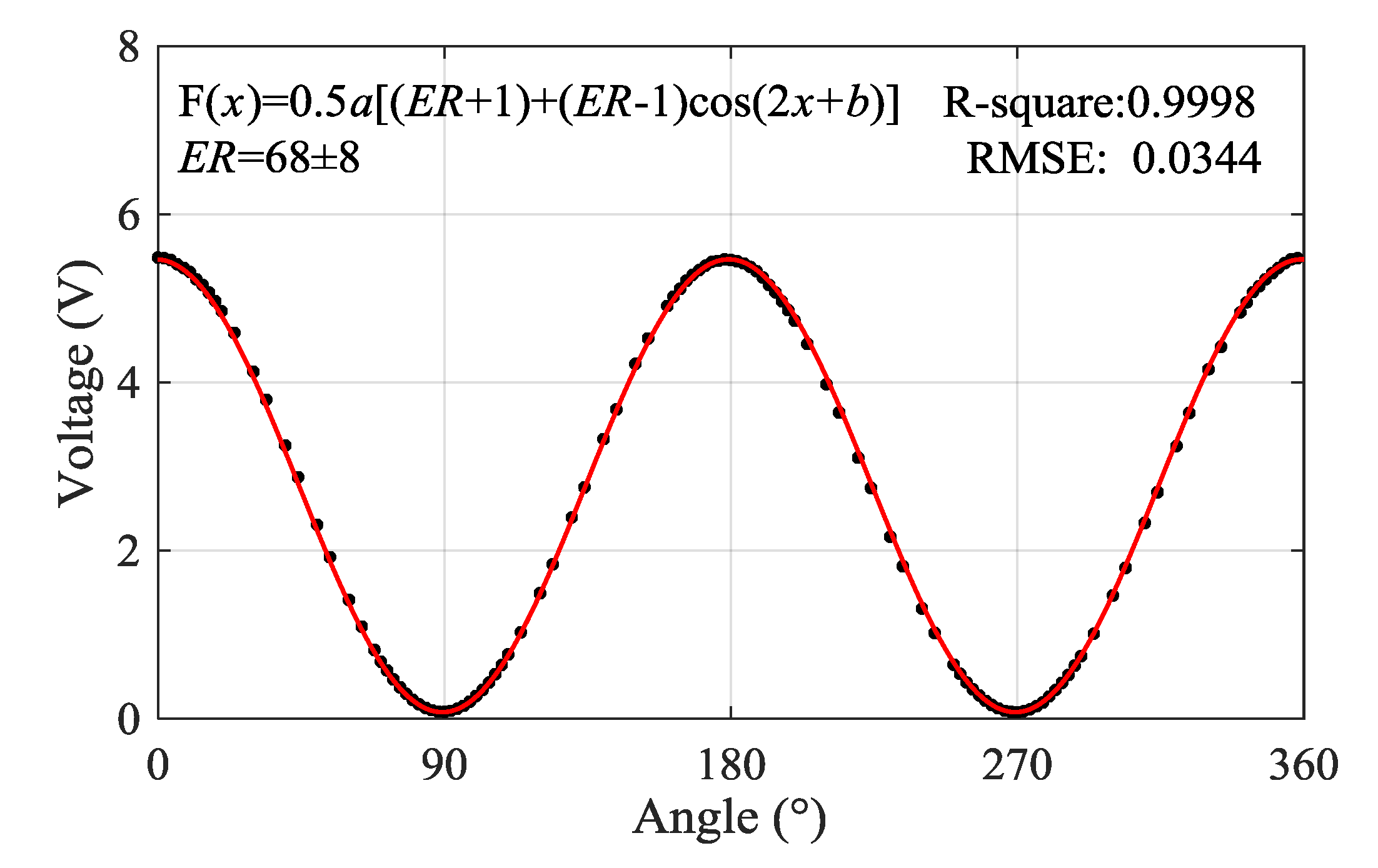
3.1. The DoLP of the Laser Beam
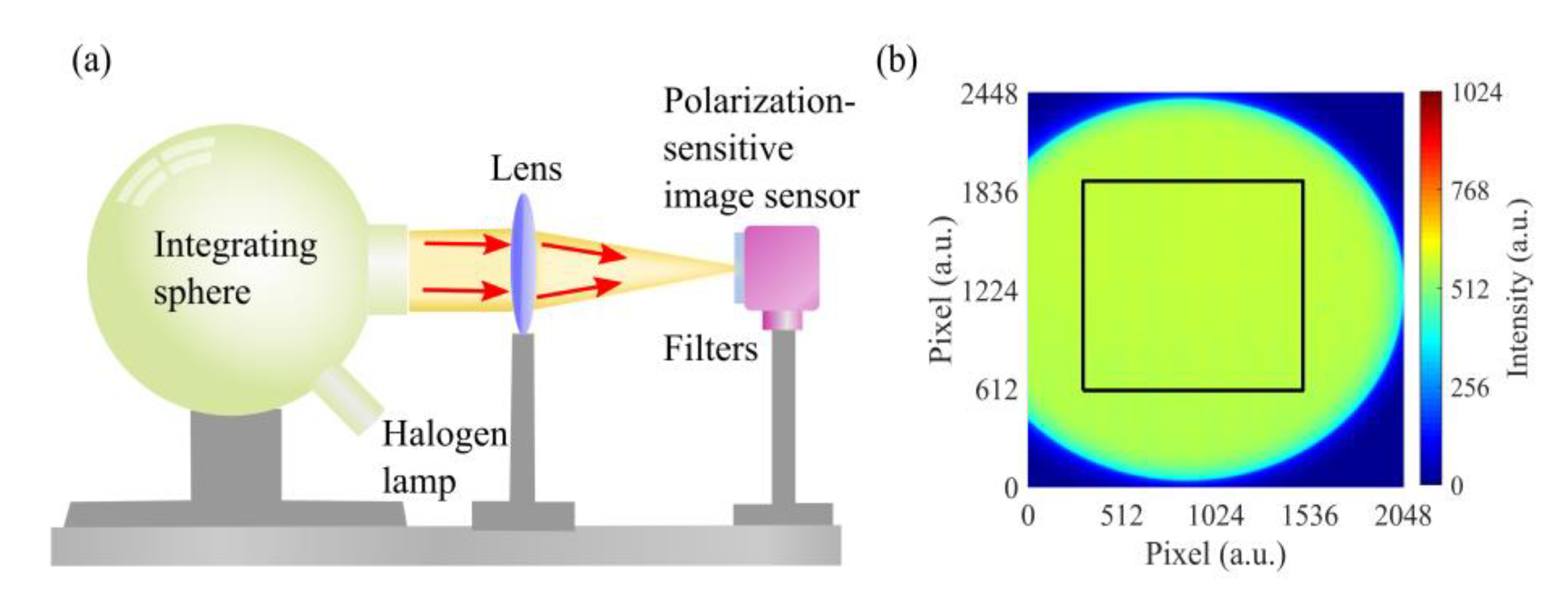
3.2. The Relative Quantum Efficiencies (QEs) of the Polarization-Sensitive Image Sensor
3.3. The Polarization Extinction Ratios (PERs) of the Polarization-Sensitive Image Sensor
4. Evaluation and Discussion of Systematic Errors for the PSI-Lidar
4.1. The Systematic Error Introduced by the DoLP of the Transmitted Laser Beam
4.2. The Systematic Error Introduced by the Polarization-Sensitive Image Sensor
4.2.1. The Systematic Error Introduced by the Relative QEs of the Four Polarization Channels
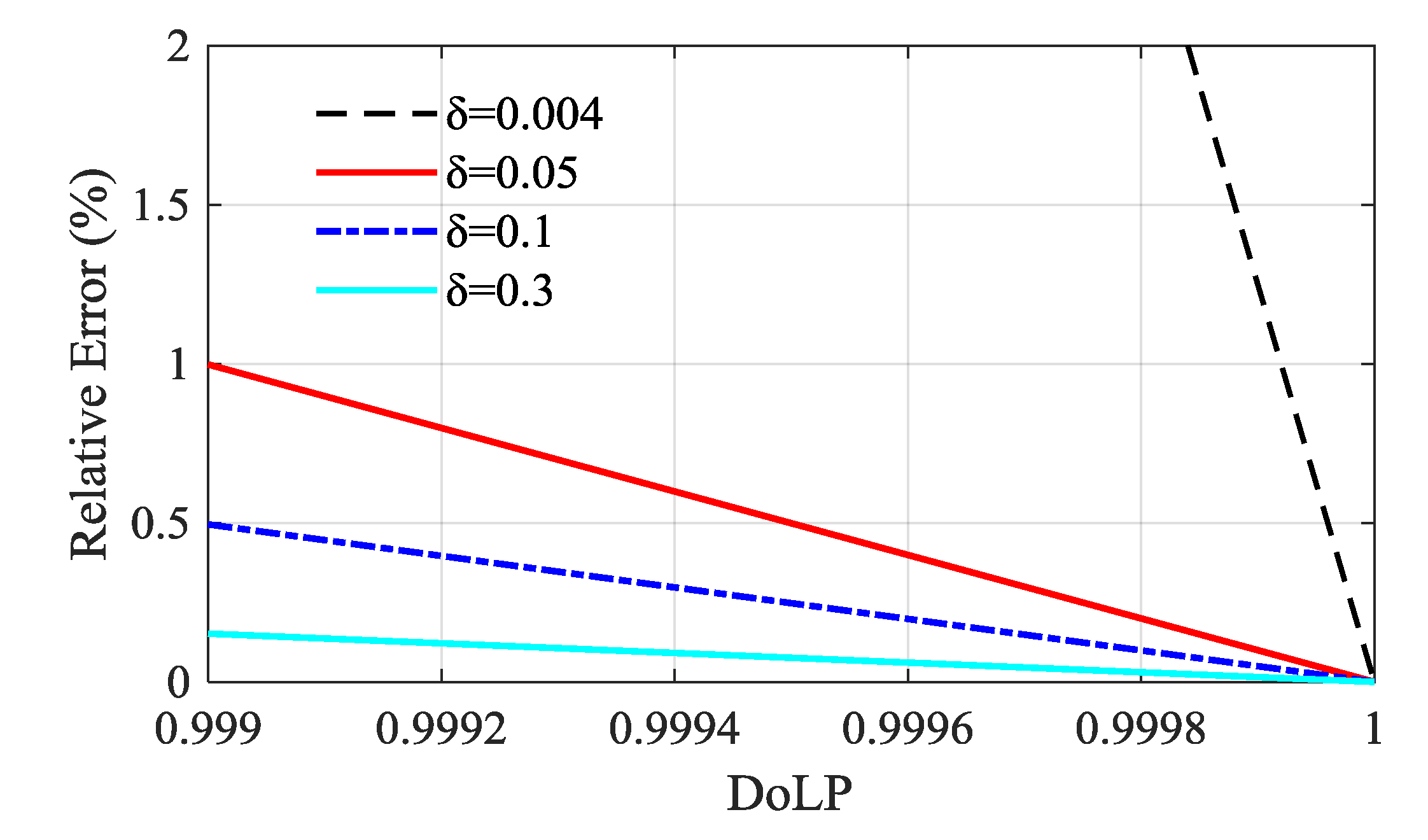
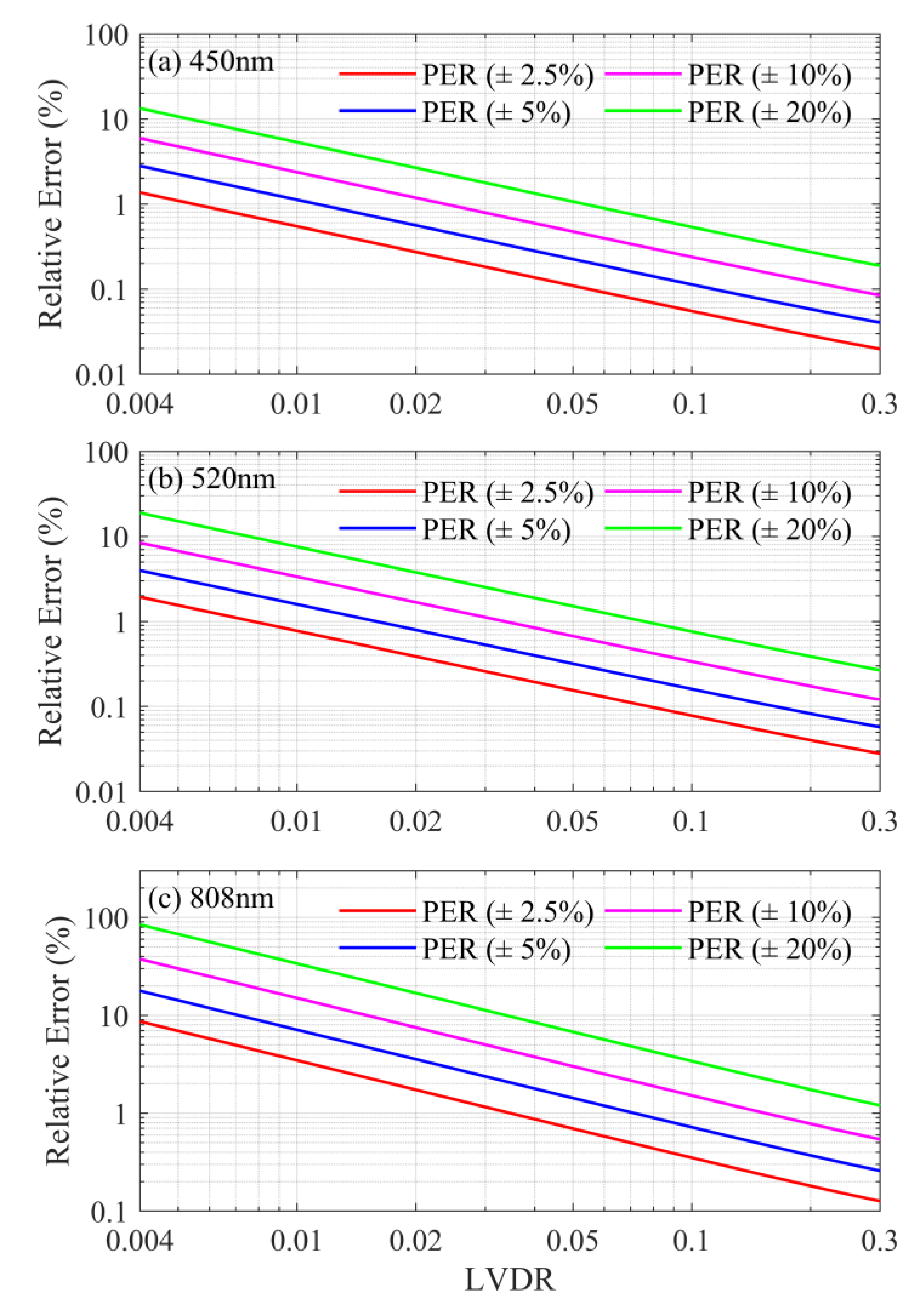
4.2.2. The Systematic Error Introduced by the Non-Ideal PERs of the Image Sensor
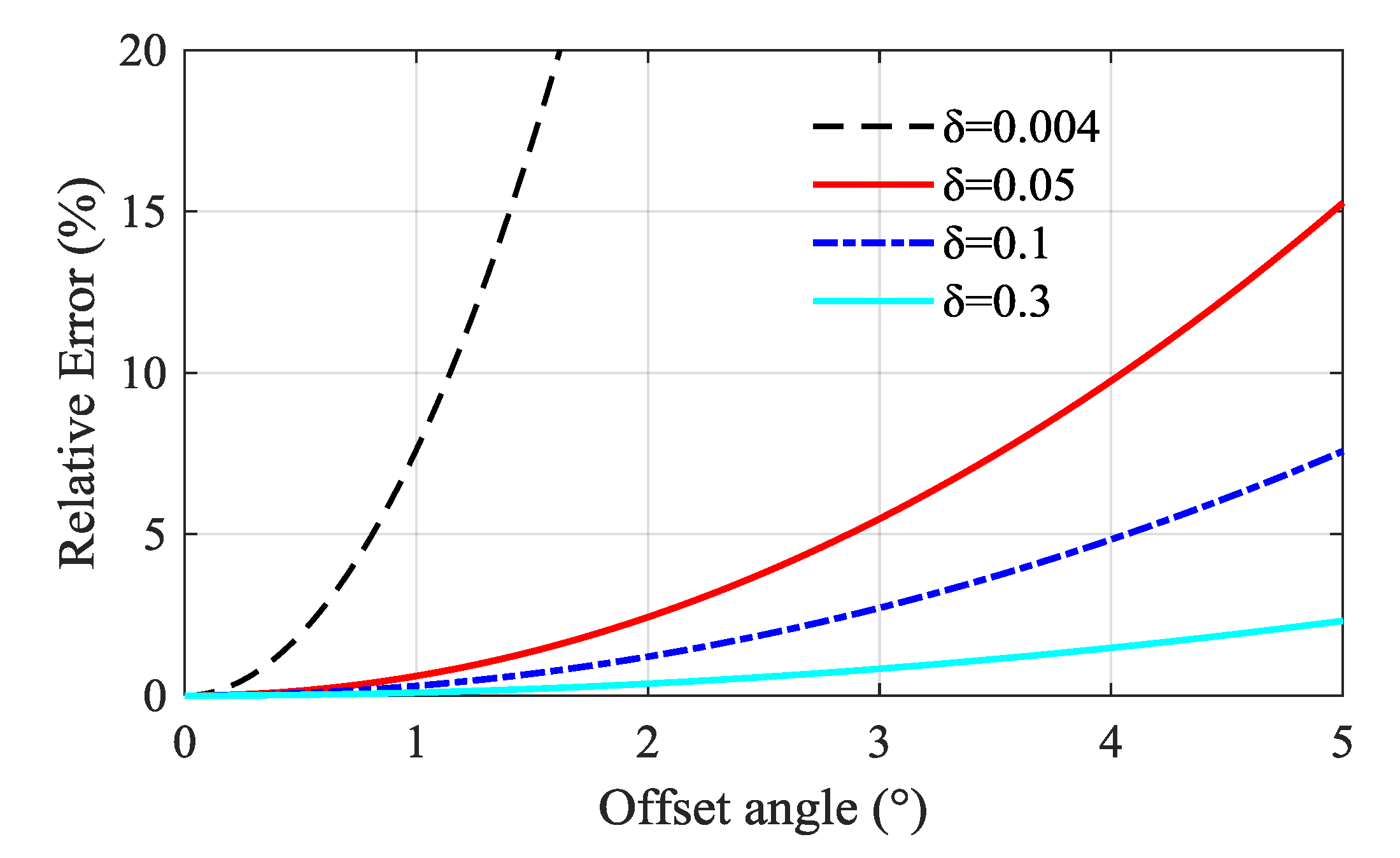
4.3. The Systematic Error Introduced by the Offset Angle
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hara, Y.; Nishizawa, T.; Sugimoto, N.; Matsui, I.; Pan, X.; Kobayashi, H.; Osada, K.; Uno, I. Optical properties of mixed aerosol layers over Japan derived with multi-wavelength Mie–Raman lidar system. J. Quant. Spectrosc. Rad. Transf. 2017, 188, 20–27. [Google Scholar] [CrossRef]
- Nishizawa, T.; Sugimoto, N.; Matsui, I.; Shimizu, A.; Hara, Y.; Itsushi, U.; Yasunaga, K.; Kudo, R.; Kim, S.W. Ground-based network observation using Mie-Raman lidars and multi-wavelength Raman lidars and algorithm to retrieve distributions of aerosol components. J. Quant. Spectrosc. Rad. Transf. 2017, 188, 79–93. [Google Scholar] [CrossRef]
- Mabuchi, Y.; Manago, N.; Bagtasa, G.; Saitoh, H.; Takeuchi, N.; Yabuki, M.; Shiina, T.; Kuze, H. Multi-Wavelength Lidar System for the Characterization of Tropospheric Aerosols and Clouds. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 2505–2508. [Google Scholar] [CrossRef]
- Burton, S.P.; Ferrare, R.A.; Hostetler, C.A.; Hair, J.W.; Rogers, R.R.; Obland, M.D.; Butler, C.F.; Cook, A.L.; Harper, D.B.; Froyd, K.D. Aerosol classification using airborne High Spectral Resolution Lidar measurements—Methodology and examples. Atmos. Meas. Tech. 2012, 5, 73–98. [Google Scholar] [CrossRef] [Green Version]
- Sugimoto, N.; Nishizawa, T.; Shimizu, A.; Matsui, I.; Kobayashi, H. Detection of internally mixed Asian dust with air pollution aerosols using a polarization optical particle counter and a polarization-sensitive two-wavelength lidar. J. Quant. Spectrosc. Rad. Transf. 2015, 150, 107–113. [Google Scholar] [CrossRef]
- Hu, S.; Hu, H.; Zhang, Y.; Zhou, J.; Yue, G.; Tan, K.; Ji, Y.; Xu, B. A new differential absorption lidar for NO2 measurements using Raman-shifted technique. Chin. Opt. Lett. 2003, 1, 435–437. [Google Scholar]
- Volten, H.; Brinksma, E.J.; Berkhout, A.J.C.; Hains, J.; Bergwerff, J.B.; Van der Hoff, G.R.; Apituley, A.; Dirksen, R.J.; Calabretta-Jongen, S.; Swart, D.P.J. NO2 lidar profile measurements for satellite interpretation and validation. J. Geophys. Res. Atmos. 2009, 114, 1–18. [Google Scholar] [CrossRef]
- Beck, H.; Kuhn, M. Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements. Remote Sens. 2017, 9, 561. [Google Scholar] [CrossRef] [Green Version]
- Silva, H.G.; Conceicao, R.; Wright, M.D.; Matthews, J.C.; Pereira, S.N.; Shallcross, D.E. Aerosol hygroscopic growth and the dependence of atmospheric electric field measurements with relative humidity. J. Aerosol Sci. 2015, 85, 42–51. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.; Li, Z.Q.; Chen, J.; Wang, Y.Y.; Wu, H.; Jin, X.A.; Liang, C.; Li, S.Z.; Wang, W.; Cribb, M. Hygroscopicity of Different Types of Aerosol Particles: Case Studies Using Multi-Instrument Data in Megacity Beijing, China. Remote Sens. 2020, 12, 785. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Kang, H.; Ryu, J.Y.; Jun, S.C.; Yun, S.T.; Choi, S.; Park, S.; Yoon, M.; Lee, H. Development of Raman Lidar for Remote Sensing of CO2 Leakage at an Artificial Carbon Capture and Storage Site. Remote Sens. 2018, 10, 1439. [Google Scholar] [CrossRef] [Green Version]
- Wagner, G.A.; Plusquellic, D.F. Multi-frequency differential absorption LIDAR system for remote sensing of CO2 and H2O near 1.6µm. Opt. Express 2018, 26, 19420–19434. [Google Scholar] [CrossRef] [PubMed]
- Shimada, S.; Goit, J.P.; Ohsawa, T.; Kogaki, T.; Nakamura, S. Coastal Wind Measurements Using a Single Scanning LiDAR. Remote Sens. 2020, 12, 1347. [Google Scholar] [CrossRef] [Green Version]
- Witschas, B.; Lemmerz, C.; Geiss, A.; Lux, O.; Marksteiner, U.; Rahm, S.; Reitebuch, O.; Weiler, F. First validation of Aeolus wind observations by airborne Doppler wind lidar measurements. Atmos. Meas. Tech. 2020, 13, 2381–2396. [Google Scholar] [CrossRef]
- Sassen, K. The Polarization Lidar Technique for Cloud Research—A Review and Current Assessment. B Am. Meteorol. Soc. 1991, 72, 1848–1866. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Omar, A.; Vaughan, M.; Hair, J.; Kittaka, C.; Hu, Y.X.; Powell, K.; Trepte, C.; Winker, D.; Hostetler, C.; et al. CALIPSO lidar observations of the optical properties of Saharan dust: A case study of long-range transport. J. Geophys. Res. Atmos. 2008, 113, D07207. [Google Scholar] [CrossRef]
- Schotland, R.M.; Sassen, K.; Stone, R. Observations by Lidar of Linear Depolarization Ratios for Hydrometeors. J. Appl. Meteorol. 1971, 10, 1011–1017. [Google Scholar] [CrossRef] [Green Version]
- Pal, S.R.; Carswell, A.I. Polarization Properties of Lidar Backscattering from Clouds. Appl. Opt. 1973, 12, 1530–1535. [Google Scholar] [CrossRef]
- Sassen, K. Corona-Producing Cirrus Cloud Properties Derived from Polarization Lidar and Photographic Analyses. Appl. Opt. 1991, 30, 3421–3428. [Google Scholar] [CrossRef]
- Veselovskii, I.; Goloub, P.; Podvin, T.; Tanre, D.; Ansmann, A.; Korenskiy, M.; Borovoi, A.; Hu, Q.; Whiteman, D.N. Spectral dependence of backscattering coefficient of mixed phase clouds over West Africa measured with two-wavelength Raman polarization lidar: Features attributed to ice-crystals corner reflection. J. Quant. Spectrosc. Rad. Transf. 2017, 202, 74–80. [Google Scholar] [CrossRef]
- Borovoi, A.; Balin, Y.; Kokhanenko, G.; Penner, I.; Konoshonkin, A.; Kustova, N. Layers of quasi-horizontally oriented ice crystals in cirrus clouds observed by a two-wavelength polarization lidar. Opt. Express 2014, 22, 24566–24573. [Google Scholar] [CrossRef]
- Wang, Z.Z.; Chi, R.L.; Bo, L.; Jun, Z. Depolarization properties of cirrus clouds from polarization lidar measurements over Hefei in spring. Chin. Opt. Lett. 2008, 6, 235–237. [Google Scholar] [CrossRef]
- Gobbi, G.P. Polarization lidar returns from aerosols and thin clouds: A framework for the analysis. Appl. Opt. 1998, 37, 5505–5508. [Google Scholar] [CrossRef]
- Noel, V.; Sassen, K. Study of planar ice crystal orientations in ice clouds from scanning polarization lidar observations. J. Appl. Meteorol. 2005, 44, 653–664. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.N.; Chiang, C.W.; Nee, J.B. Lidar ratio and depolarization ratio for cirrus clouds. Appl. Opt. 2002, 41, 6470–6476. [Google Scholar] [CrossRef] [PubMed]
- Heese, B.; Wiegner, M. Vertical aerosol profiles from Raman polarization lidar observations during the dry season AMMA field campaign. J. Geophys. Res. Atmos. 2008, 113, D00C11.1–D00C11.12. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.Y.; Roy, G.; Bernier, R. Lidar polarization discrimination of bioaerosols. Opt. Eng. 2010, 49, 116201. [Google Scholar] [CrossRef]
- Sugimoto, N.; Matsui, I.; Shimizu, A.; Uno, I.; Asai, K.; Endoh, T.; Nakajima, T. Observation of dust and anthropogenic aerosol plumes in the Northwest Pacific with a two-wavelength polarization lidar on board the research vessel Mirai. Geophys. Res. Lett. 2002, 29, 7-1-7-4. [Google Scholar] [CrossRef] [Green Version]
- Sassen, K.; Zhu, J.; Webley, P.; Dean, K.; Cobb, P. Volcanic ash plume identification using polarization lidar: Augustine eruption, Alaska. Geophys. Res. Lett. 2007, 34, 1–4. [Google Scholar] [CrossRef]
- Tesche, M.; Ansmann, A.; Müller, D.; Althausen, D.; Engelmann, R.; Freudenthaler, V.; Groß, S. Vertically resolved separation of dust and smoke over Cape Verde using multiwavelength Raman and polarization lidars during Saharan Mineral Dust Experiment 2008. J. Geophys. Res. 2009, 114, D13202. [Google Scholar] [CrossRef]
- Hofer, J.; Althausen, D.; Abdullaev, S.F.; Makhmudov, A.N.; Nazarov, B.I.; Schettler, G.; Engelmann, R.; Baars, H.; Fomba, K.W.; Muller, K.; et al. Long-term profiling of mineral dust and pollution aerosol with multiwavelength polarization Raman lidar at the Central Asian site of Dushanbe, Tajikistan: Case studies. Atmos. Chem. Phys. 2017, 17, 14559–14577. [Google Scholar] [CrossRef] [Green Version]
- Mamouri, R.E.; Ansmann, A. Estimated desert-dust ice nuclei profiles from polarization lidar: Methodology and case studies. Atmos. Chem. Phys. 2015, 15, 3463–3477. [Google Scholar] [CrossRef] [Green Version]
- Gross, S.; Esselborn, M.; Weinzierl, B.; Wirth, M.; Fix, A.; Petzold, A. Aerosol classification by airborne high spectral resolution lidar observations. Atmos. Chem. Phys. 2013, 13, 2487–2505. [Google Scholar] [CrossRef] [Green Version]
- Baars, H.; Kanitz, T.; Engelmann, R.; Althausen, D.; Heese, B.; Komppula, M.; Preissler, J.; Tesche, M.; Ansmann, A.; Wandinger, U.; et al. An overview of the first decade of Polly(NET): An emerging network of automated Raman-polarization lidars for continuous aerosol profiling. Atmos. Chem. Phys. 2016, 16, 5111–5137. [Google Scholar] [CrossRef] [Green Version]
- Shimizu, A.; Sugimoto, N.; Matsui, I.; Arao, K.; Uno, I.; Murayama, T.; Kagawa, N.; Aoki, K.; Uchiyama, A.; Yamazaki, A. Continuous observations of Asian dust and other aerosols by polarization lidars in China and Japan during ACE-Asia. J. Geophys. Res. Atmos. 2004, 109, D19S17. [Google Scholar] [CrossRef]
- Mamouri, R.E.; Ansmann, A. Fine and coarse dust separation with polarization lidar. Atmos. Meas. Tech. 2014, 7, 3717–3735. [Google Scholar] [CrossRef] [Green Version]
- Tesche, M.; Gross, S.; Ansmann, A.; Muller, D.; Althausen, D.; Freudenthaler, V.; Esselborn, M. Profiling of Saharan dust and biomass-burning smoke with multiwavelength polarization Raman lidar at Cape Verde. Tellus B 2011, 63, 649–676. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.W.; Qi, S.Q.; Zhou, T.; Dong, Q.Q.; Ma, X.J.; Zhang, S.; Bi, J.R.; Shi, J.S. Investigation of aerosol absorption with dual-polarization lidar observations. Opt. Express 2020, 28, 7028–7035. [Google Scholar] [CrossRef]
- Gregorio, E.; Gene, J.; Sanz, R.; Rocadenbosch, F.; Chueca, P.; Arno, J.; Solanelles, F.; Rosell-Polo, J.R. Polarization Lidar Detection of Agricultural Aerosol Emissions. J. Sens. 2018, 2018, 1864106. [Google Scholar] [CrossRef]
- Mattis, I.; Tesche, M.; Grein, M.; Freudenthaler, V.; Muller, D. Systematic error of lidar profiles caused by a polarization-dependent receiver transmission: Quantification and error correction scheme. Appl. Opt. 2009, 48, 2742–2751. [Google Scholar] [CrossRef]
- Brown, A.J.; Michaels, T.I.; Byrne, S.; Sun, W.B.; Titus, T.N.; Colaprete, A.; Wolff, M.J.; Videen, G.; Grund, C.J. The case for a modern multiwavelength, polarization-sensitive LIDAR in orbit around Mars. J. Quant. Spectrosc. Rad. Transf. 2015, 153, 131–143. [Google Scholar] [CrossRef] [Green Version]
- Freudenthaler, V. About the effects of polarising optics on lidar signals and the Delta 90 calibration. Atmos. Meas. Tech. 2016, 9, 4181–4255. [Google Scholar] [CrossRef] [Green Version]
- Freudenthaler, V.; Seefeldner, M.; Gross, S.; Wandinger, U. Accuracy of Linear Depolarisation Ratios in Clean Air Ranges Measured with Polis-6 at 355 and 532 nm. In Proceedings of the 27th International Laser Radar Conference (ILRC 27), New York, NY, USA, 5–10 July 2015; p. 25013. [Google Scholar]
- Del Guasta, M.; Vallar, E.; Riviere, O.; Castagnoli, F.; Venturi, V.; Morandi, M. Use of polarimetric lidar for the study of oriented ice plates in clouds. Appl. Opt. 2006, 45, 4878–4887. [Google Scholar] [CrossRef] [PubMed]
- Freudenthaler, V.; Esselborn, M.; Wiegner, M.; Heese, B.; Tesche, M.; Ansmann, A.; Muller, D.; Althausen, D.; Wirth, M.; Fix, A.; et al. Depolarization ratio profiling at several wavelengths in pure Saharan dust during SAMUM 2006. Tellus B 2009, 61, 165–179. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Wang, Z. Improved calibration method for depolarization lidar measurement. Opt. Express 2013, 21, 14583–14590. [Google Scholar] [CrossRef] [PubMed]
- Dai, G.Y.; Wu, S.H.; Song, X.Q. Depolarization Ratio Profiles Calibration and Observations of Aerosol and Cloud in the Tibetan Plateau Based on Polarization Raman Lidar. Remote Sens. 2018, 10, 378. [Google Scholar] [CrossRef] [Green Version]
- Cairo, F.; Di Donfrancesco, G.; Adriani, A.; Pulvirenti, L.; Fierli, F. Comparison of various linear depolarization parameters measured by lidar. Appl. Opt. 1999, 38, 4425–4432. [Google Scholar] [CrossRef]
- Biele, J.; Beyerle, G.; Baumgarten, G. Polarization lidar: Corrections of instrumental effects. Opt. Express 2000, 7, 427–435. [Google Scholar] [CrossRef]
- Alvarez, J.M.; Vaughan, M.A.; Hostetler, C.A.; Hunt, W.H.; Winker, D.M. Calibration technique for polarization-sensitive lidars. J. Atmos. Ocean Tech. 2006, 23, 683–699. [Google Scholar] [CrossRef]
- Hayman, M.; Thayer, J.P. General description of polarization in lidar using Stokes vectors and polar decomposition of Mueller matrices. J. Opt. Soc. Am. A 2012, 29, 400–409. [Google Scholar] [CrossRef]
- Di, H.G.; Hua, D.X.; Yan, L.J.; Hou, X.L.; Wei, X. Polarization analysis and corrections of different telescopes in polarization lidar. Appl. Opt. 2015, 54, 389–397. [Google Scholar] [CrossRef]
- Di, H.G.; Hua, H.B.; Cui, Y.; Hua, D.X.; Li, B.; Song, Y.H. Correction technology of a polarization lidar with a complex optical system. J. Opt. Soc. Am. A 2016, 33, 1488–1494. [Google Scholar] [CrossRef]
- Bravo-Aranda, J.A.; Belegante, L.; Freudenthaler, V.; Alados-Arboledas, L.; Nicolae, D.; Granados-Munoz, M.J.; Guerrero-Rascado, J.L.; Amodeo, A.; D’Amico, G.; Engelmann, R.; et al. Assessment of lidar depolarization uncertainty by means of a polarimetric lidar simulator. Atmos. Meas. Tech. 2016, 9, 4935–4953. [Google Scholar] [CrossRef]
- Mei, L.; Brydegaard, M. Atmospheric aerosol monitoring by an elastic Scheimpflug lidar system. Opt. Express 2015, 23, 1613–1628. [Google Scholar] [CrossRef] [PubMed]
- Mei, L.; Brydegaard, M. Continuous-wave differential absorption lidar. Laser Photonics Rev. 2015, 9, 629–636. [Google Scholar] [CrossRef]
- Mei, L.; Kong, Z.; Guan, P. Implementation of a violet Scheimpflug lidar system for atmospheric aerosol studies. Opt. Express 2018, 26, A260–A274. [Google Scholar] [CrossRef]
- Mei, L.; Kong, Z.; Ma, T. Dual-wavelength Mie-scattering Scheimpflug lidar system developed for the studies of the aerosol extinction coefficient and the Angstrom exponent. Opt. Express 2018, 26, 31942–31956. [Google Scholar] [CrossRef]
- Kong, Z.; Ma, T.; Chen, K.; Gong, Z.F.; Mei, L. Three-wavelength polarization Scheimpflug lidar system developed for remote sensing of atmospheric aerosols. Appl. Opt. 2019, 58, 8612–8621. [Google Scholar] [CrossRef]
- Mei, L.; Guan, P. Development of an atmospheric polarization Scheimpflug lidar system based on a time-division multiplexing scheme. Opt. Lett. 2017, 42, 3562–3565. [Google Scholar] [CrossRef]
- Zhu, S.M.; Malmqvist, E.; Li, W.S.; Jansson, S.; Li, Y.Y.; Duan, Z.; Svanberg, K.; Feng, H.Q.; Song, Z.W.; Zhao, G.Y.; et al. Insect abundance over Chinese rice fields in relation to environmental parameters, studied with a polarization-sensitive CW near-IR lidar system. Appl. Phys. B 2017, 123, 211. [Google Scholar] [CrossRef]
- Kong, Z.; Ma, T.; Cheng, Y.; Zhang, Z.; Mei, L. A calibration-free polarization imaging lidar developed for atmospheric remote sensing. J. Quant. Spectrosc. Rad. Transf. 2020. under review. [Google Scholar]
- Kong, Z.; Ma, T.; Cheng, Y.; Zhang, Z.; Li, Y.; Liu, K.; Mei, L. Feasibility investigation of a monostatic imaging lidar with a parallel-placed image sensor for atmospheric remote sensing. J. Quant. Spectrosc. Rad. Transf. 2020, 254, 107212. [Google Scholar] [CrossRef]
- Brydegaard, M.; Gebru, A.; Svanberg, S. Super Resolution Laser Radar with Blinking Atmospheric Particles—Application to Interacting Flying Insects. Prog. Electromagn. Res. 2014, 147, 141–151. [Google Scholar] [CrossRef] [Green Version]
- Chipman, R.A. HandBook Of Optics, 3rd ed.; McGraw-Hill: New York, NY, USA, 2009; pp. 478–567. [Google Scholar]
- Bohren, C.F.; Huffman, D.R. Electromagnetic Theory; Wiley-VCH: Berlin, Germany, 1998. [Google Scholar] [CrossRef]
- Travis, L.; Lacis, A. Scattering, Absorption, and Emission of Light by Small Particles; Cambridge University Press: Cambridge, UK, 2002; Volume 4. [Google Scholar]
- Gimmestad, G.G. Reexamination of depolarization in lidar measurements. Appl. Opt. 2008, 47, 3795–3802. [Google Scholar] [CrossRef] [PubMed]
- Flynn, C.J.; Mendoza, A.; Zheng, Y.H.; Mathur, S. Novel polarization-sensitive micropulse lidar measurement technique. Opt. Express 2007, 15, 2785–2790. [Google Scholar] [CrossRef] [PubMed]
- Mei, L.; Zhang, L.S.; Kong, Z.; Li, H. Noise modeling, evaluation and reduction for the atmospheric lidar technique employing an image sensor. Opt. Commun. 2018, 426, 463–470. [Google Scholar] [CrossRef]
- Seldomridge, N.; Shaw, J.; Repasky, K. Dual-polarization lidar using a liquid crystal variable retarder. Opt. Eng. 2006, 45, 106202. [Google Scholar] [CrossRef]
- Clark, N.; Breckinridge, J.B. Polarization compensation of Fresnel aberrations in telescopes. In Proceedings of the Uv/Optical/Ir Space Telescopes and Instruments: Innovative Technologies and Concepts V, San Diego, CA, USA, 21–25 August 2011; Volume 8146. [Google Scholar] [CrossRef] [Green Version]
- Behrendt, A.; Nakamura, T. Calculation of the calibration constant of polarization lidar and its dependency on atmospheric temperature. Opt. Express 2002, 10, 805–817. [Google Scholar] [CrossRef]
- Tian, Y.; Pan, X.; Wang, Z.; Wang, D.; Ge, B.; Liu, X.; Zhang, Y.; Liu, H.; Lei, S.; Yang, T.; et al. Transport Patterns, Size Distributions, and Depolarization Characteristics of Dust Particles in East Asia in Spring 2018. J. Geophys. Res. Atmos. 2020, 125, 1–17. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser Diode | 450 nm | 450 nm | 520 nm | 808 nm |
|---|---|---|---|---|
| Supplier | Osram | Thorlabs | Thorlabs | Huaguang Optoelectronics |
| Model | PL TB450B | L450G1 | L520G1 | C-mount |
| Output power | 1.6 W | 3.2 W | 0.9 W | 5 W |
| PER | 400:1 | 100:1 | 300:1 | 68 ± 8:1 |
| DoLP | 0.9950 | 0.9802 | 0.9934 | >0.9672 |
| Wavelengths | Polarized Channel | Relative QEs Calculated from Measurements | Relative QEs from Datasheet | Relative Bias |
|---|---|---|---|---|
| 450 nm with a bandwidth of 10 nm | 0° | 0.9832 ± 0.0002 | 0.982 | 0.12% |
| 90° | 0.9805 ± 0.0004 | 0.981 | 0.05% | |
| 45° | 1.0242 ± 0.0003 | 1.024 | 0.02% | |
| 135° | 1.0121 ± 0.0002 | 1.013 | 0.08% | |
| 520 nm with a bandwidth of 10 nm | 0° | 0.9897 ± 0.0001 | 0.988 | 0.17% |
| 90° | 0.9844 ± 0.0003 | 0.985 | 0.06% | |
| 45° | 1.0168 ± 0.0002 | 1.020 | 0.31% | |
| 135° | 1.0091 ± 0.0002 | 1.006 | 0.31% | |
| 808 nm with a bandwidth of 3.1 nm | 0° | 0.9937 ± 0.0001 | 0.980 | 1.40% |
| 90° | 0.9823 ± 0.0003 | 0.999 | 1.67% | |
| 45° | 1.0050 ± 0.0001 | 1.014 | 0.89% | |
| 135° | 1.0190 ± 0.0003 | 1.007 | 1.19% |
| Polarization Angle | 450 nm | 520 nm | 808 nm |
|---|---|---|---|
| 0° | 467 | 338 | 74 |
| 90° | 469 | 331 | 74 |
| 45° | 414 | 306 | 107 |
| 135° | 434 | 301 | 60 |
| LVDR | PER: 467 at 0° 469 at 90° at 450 nm | PER: 338 at 0° 331 at 90° at 520 nm | PER: 74 at 0° 74 at 90° at 808 nm |
|---|---|---|---|
| 0.004 | 53% | 76% | 338% |
| 0.05 | 4% | 6% | 27% |
| 0.1 | 2% | 3% | 13% |
| 0.3 | 0.7% | 0.9% | 4% |
| LVDR = 0.004 | LVDR = 0.05 | LVDR = 0.1 | LVDR = 0.3 | |
|---|---|---|---|---|
| 450 nm | 0.01° | 0.02° | 0.02° | 0.03° |
| 520 nm | 0.02° | 0.02° | 0.02° | 0.04° |
| 808 nm | 0.08° | 0.09° | 0.10° | 0.15° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Z.; Yin, Z.; Cheng, Y.; Li, Y.; Zhang, Z.; Mei, L. Modeling and Evaluation of the Systematic Errors for the Polarization-Sensitive Imaging Lidar Technique. Remote Sens. 2020, 12, 3309. https://doi.org/10.3390/rs12203309
Kong Z, Yin Z, Cheng Y, Li Y, Zhang Z, Mei L. Modeling and Evaluation of the Systematic Errors for the Polarization-Sensitive Imaging Lidar Technique. Remote Sensing. 2020; 12(20):3309. https://doi.org/10.3390/rs12203309
Chicago/Turabian StyleKong, Zheng, Zhenping Yin, Yuan Cheng, Yichen Li, Zhen Zhang, and Liang Mei. 2020. "Modeling and Evaluation of the Systematic Errors for the Polarization-Sensitive Imaging Lidar Technique" Remote Sensing 12, no. 20: 3309. https://doi.org/10.3390/rs12203309