Spatio-Temporal Characteristics for Moon-Based Earth Observations

 ,
,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Methodology
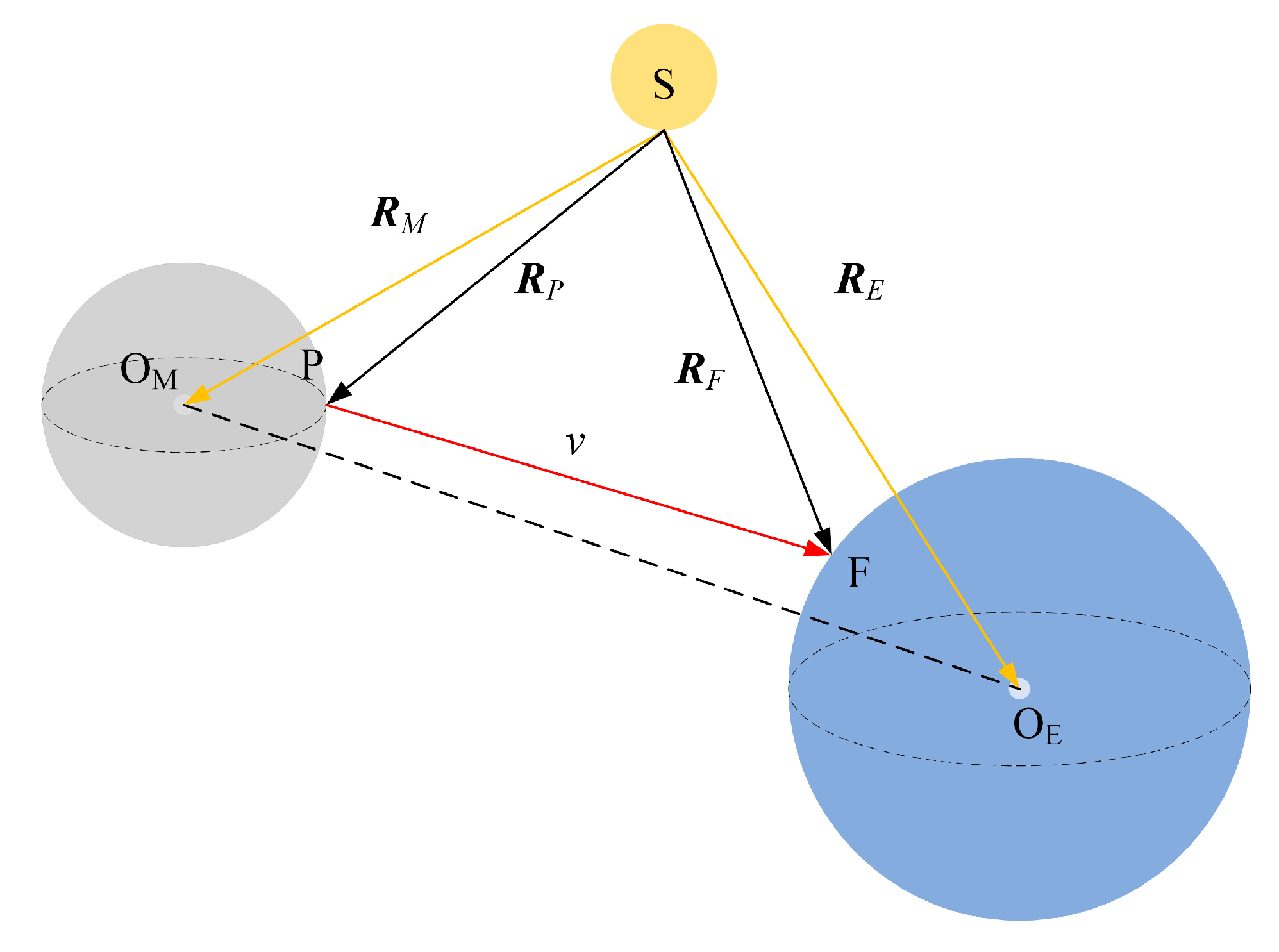
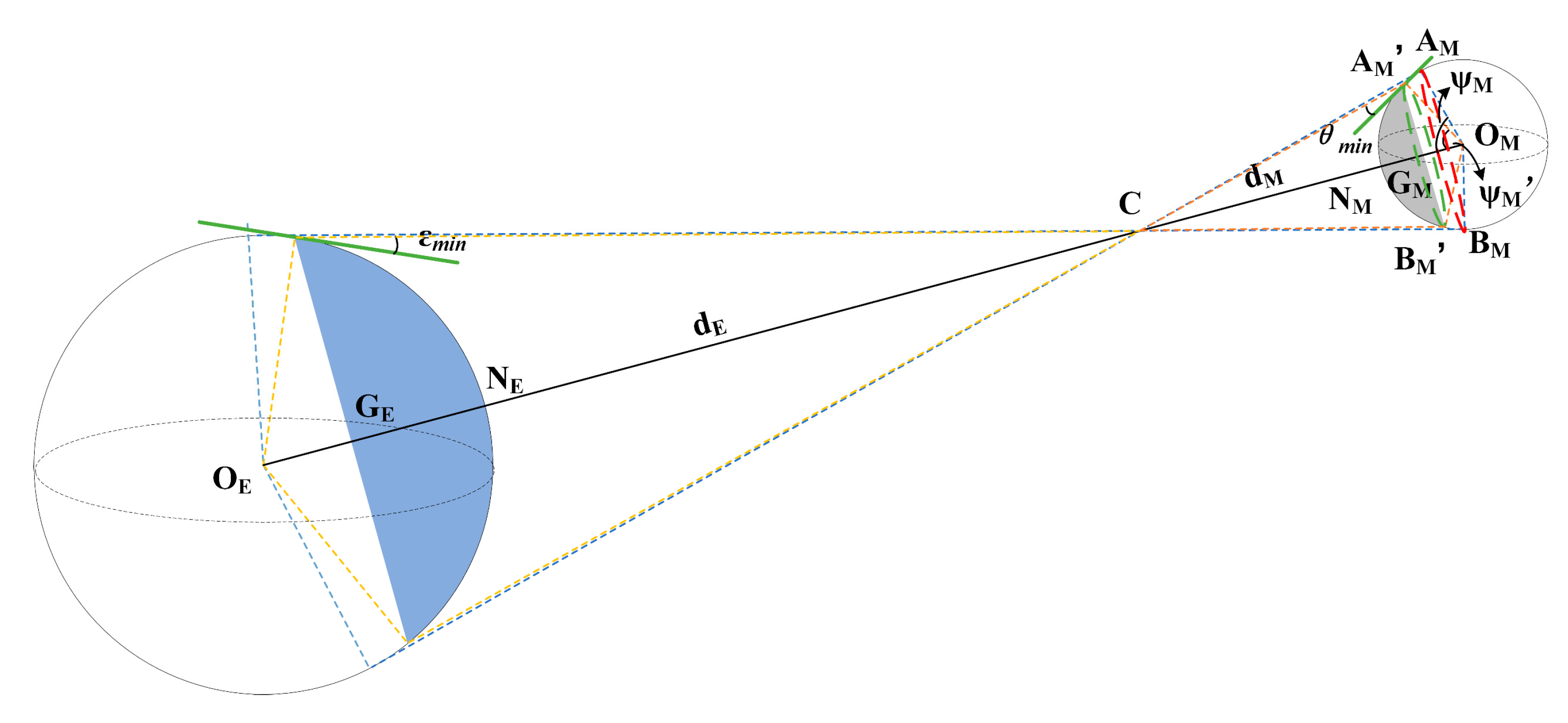
2.1. Coordinate System Definitions and Moon-Based Earth Observation Geometry
- International Terrestrial Reference System (ITRS). This is the fundamental coordinate system we have chosen to unify the Earth and the Moon. Specifically, the x-axis of ITRS points to (0°, 0°) in the latitude and longitude network coordinate system, the z-axis is oriented toward the north pole, and the y-axis completes the rotation in the right-handed Cartesian system [23].
- Geocentric Celestial Reference System (GCRS) and International Celestial Reference System (ICRS). What makes these systems unique are their origins, as GCRS is a geocentric coordinate system with its origin at the barycenter of the Earth; however, the origin of ICRS is from the solar system [24]. ICRS is the inertial system, and is the key coordinate system to transform the Moon-centered coordinate system to an Earth-centered coordinate system.
- Selenographic coordinate system (SCS). A Moon-based platform is initially defined in this coordinate system, and it is represented as latitude, longitude, and altitude. Latitudes are measured from the equator; the Moon’s north pole is expressed as +90°, whereas the south pole is −90°. The same configuration is used for longitude, as demarcated by the prime meridian; thus, the direction towards Mare Crisium is considered positive. Altitude means the distance from the lunar surface to the sphere [25].
- Moon-centered Moon-fixed coordinate system (MCMF). MCMF uses the barycenter of the Moon as the origin, with the x-axis pointing to the intersection of prime meridian and the lunar equatorial plane, and the z-axis points to the north pole of the Moon. This is the transitional coordinate system used to transform a Moon-based platform from a non-inertial system to an inertial system. According to the axis orientation, MCMF is divided into the mean Earth (ME) lunar reference system (LRS) and principal axis (PA) LRS [26,27].
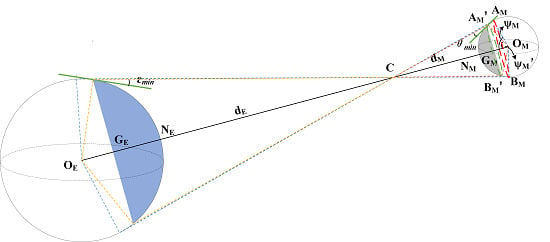
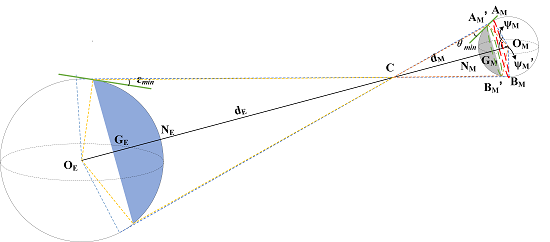
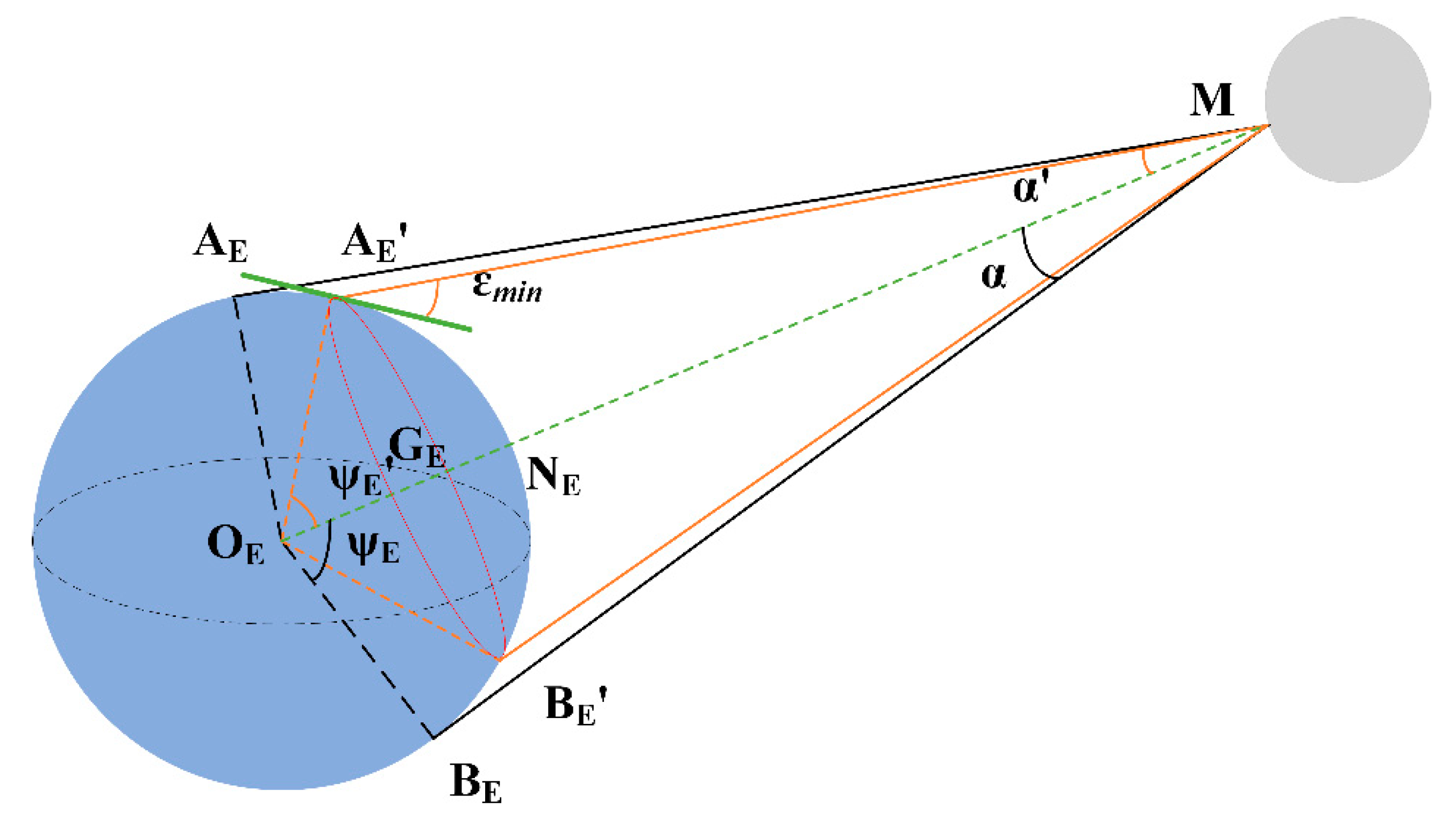
2.2. Determination of Intervisibility Conditions
3. Results and Discussion
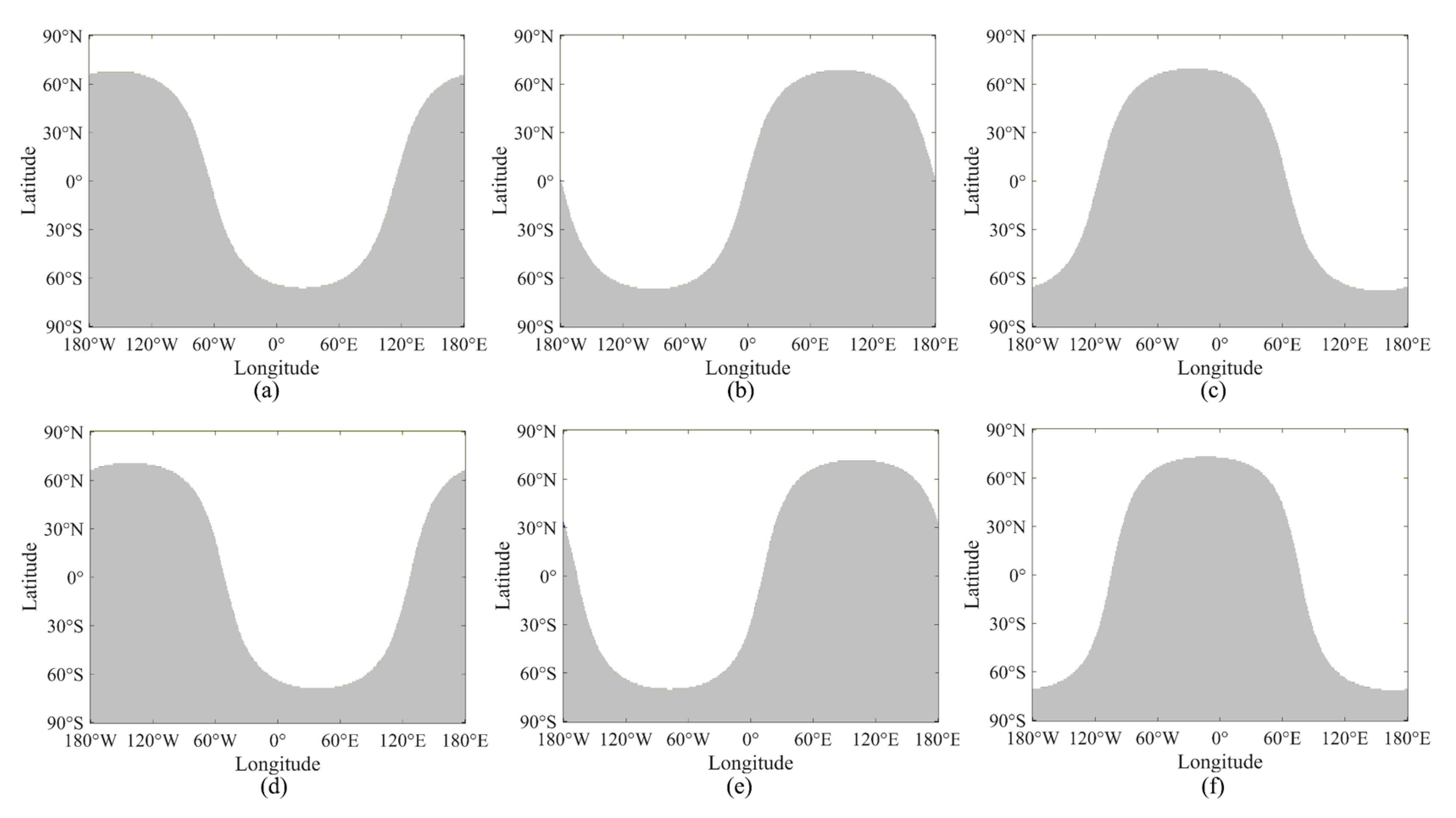
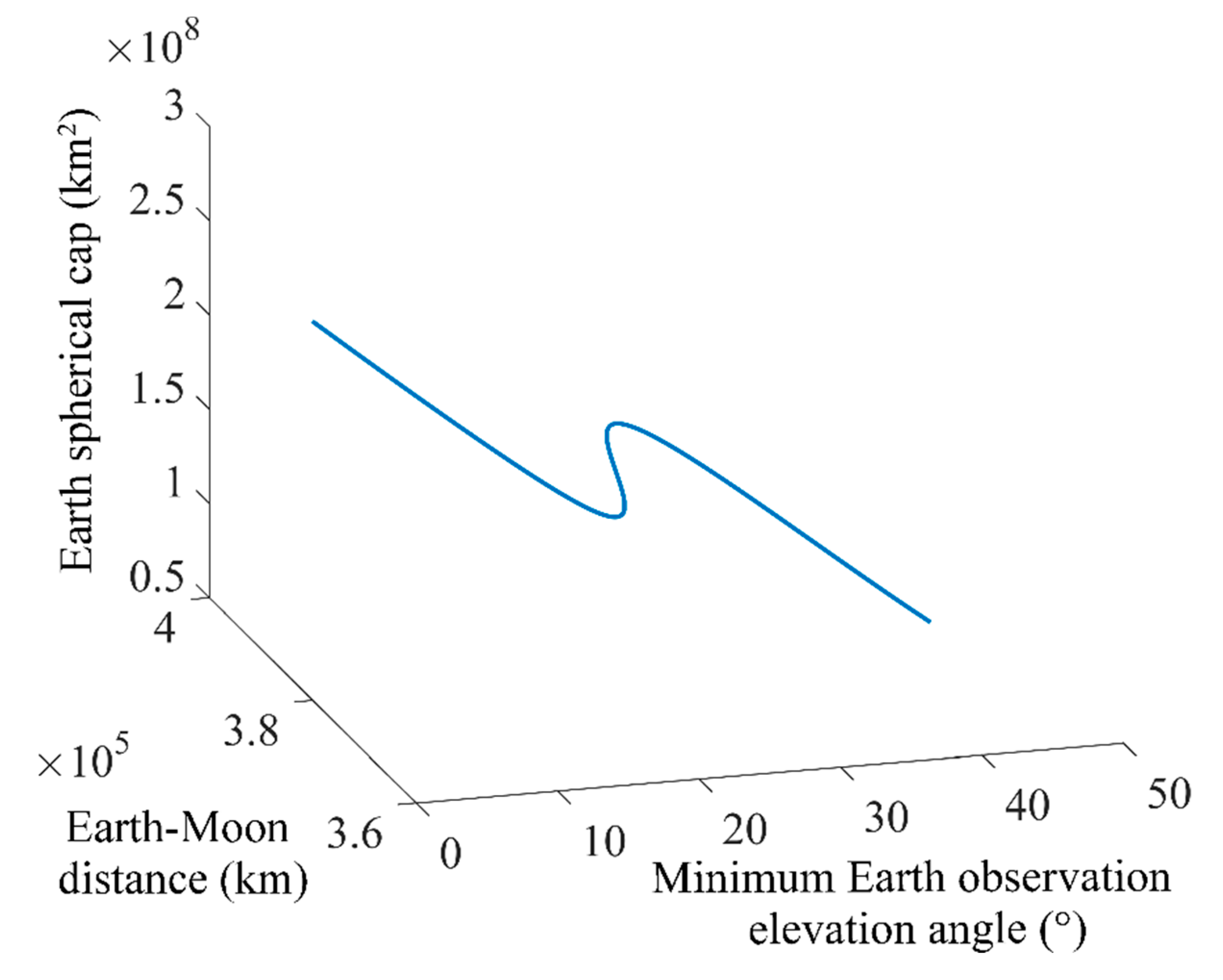
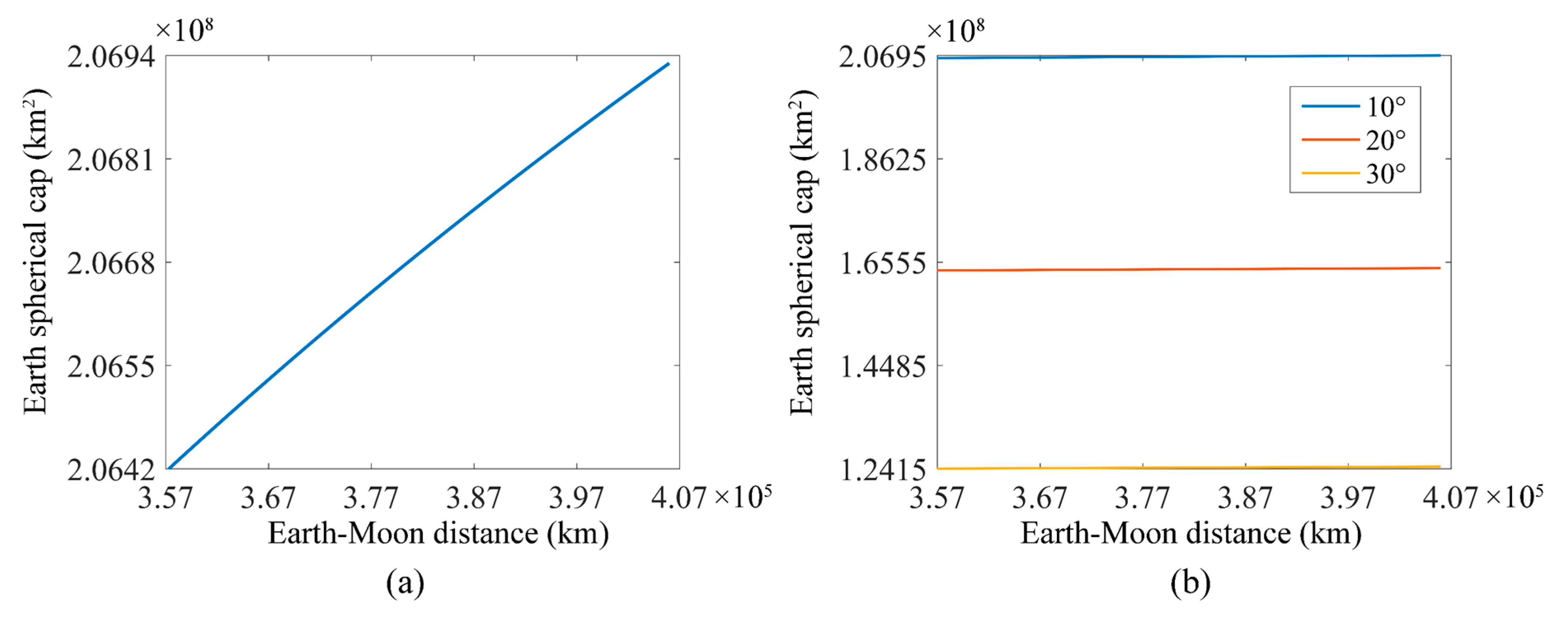
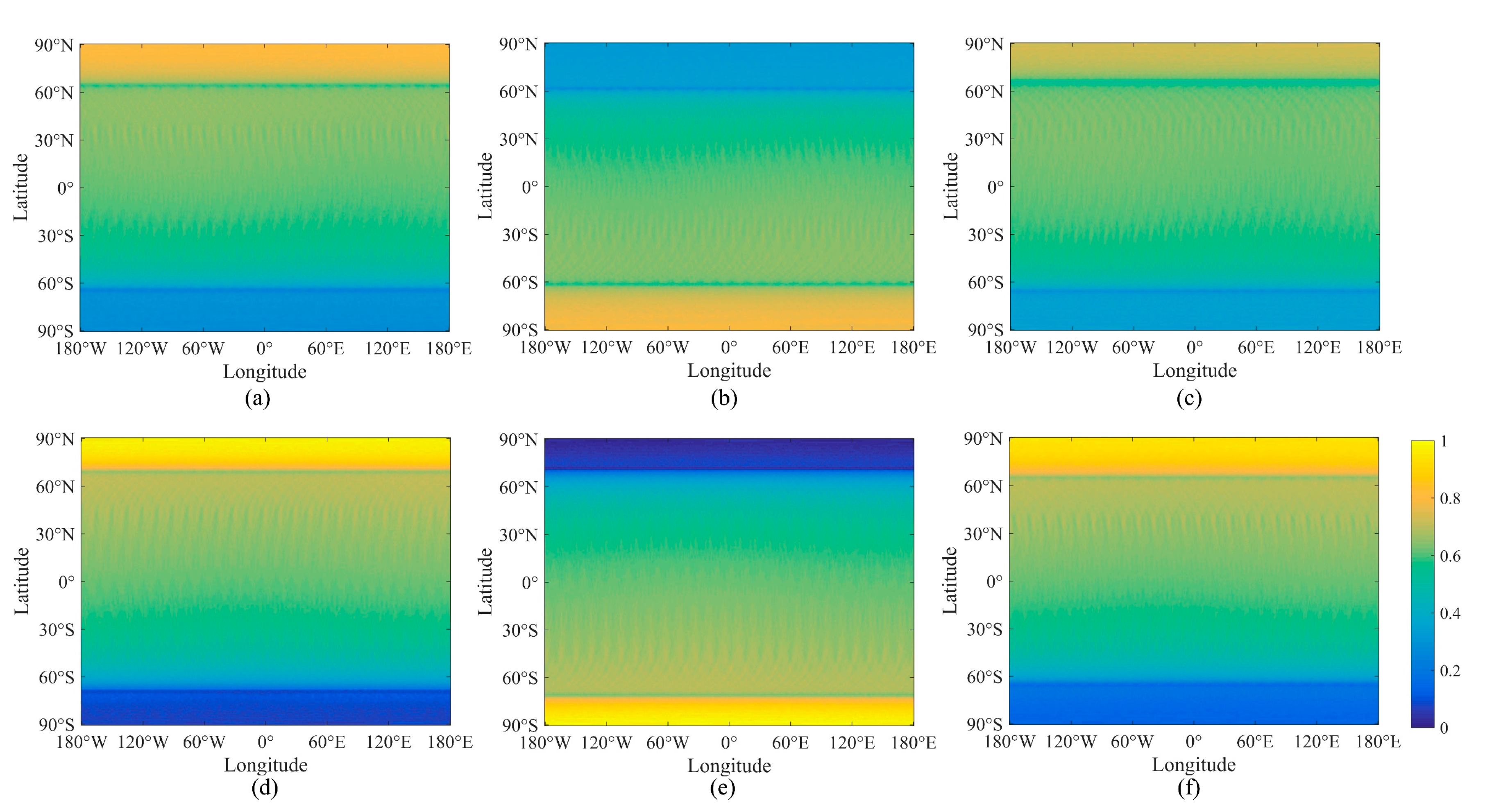
3.1. Spatio-Temporal Coverage Performance
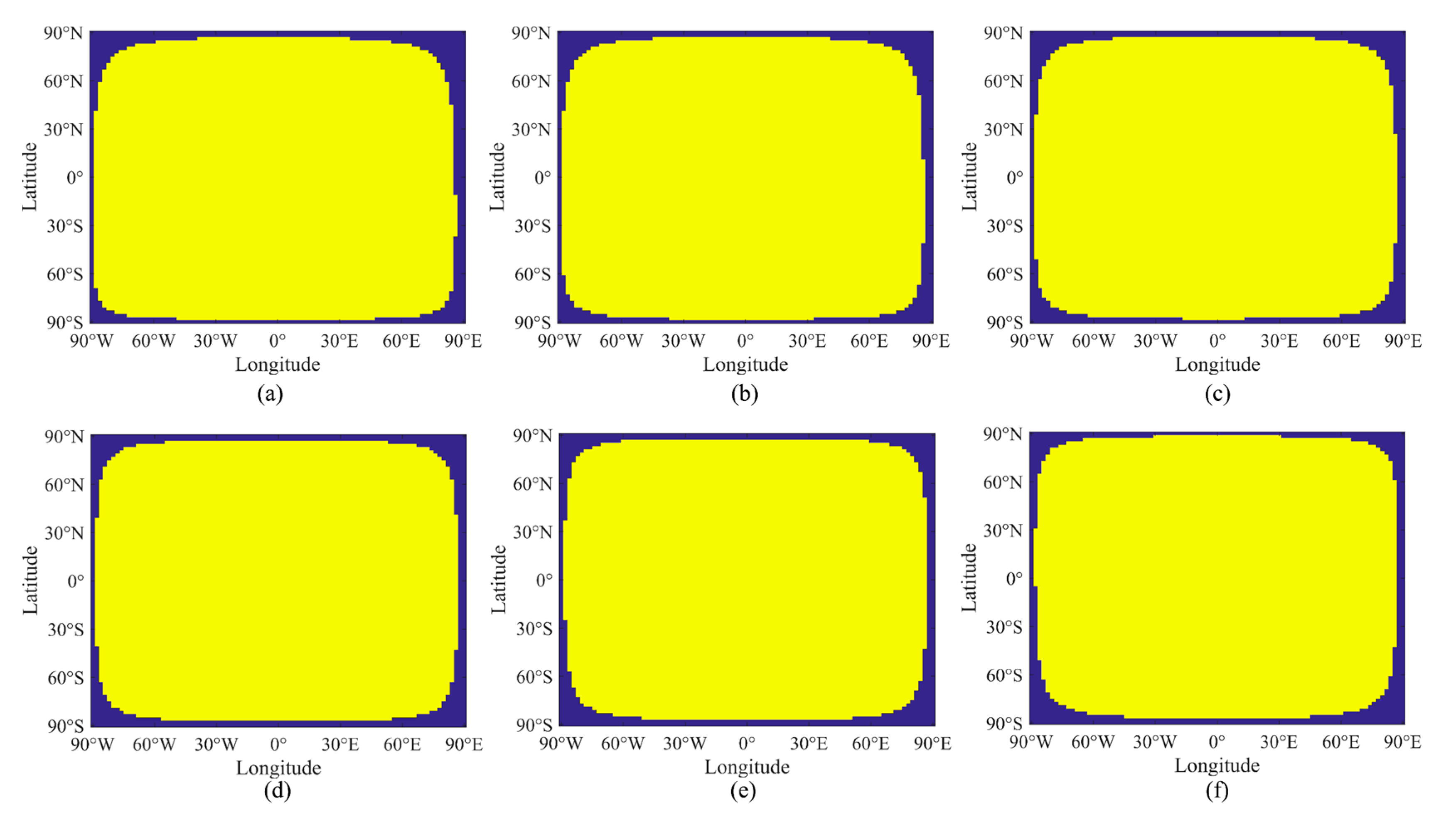
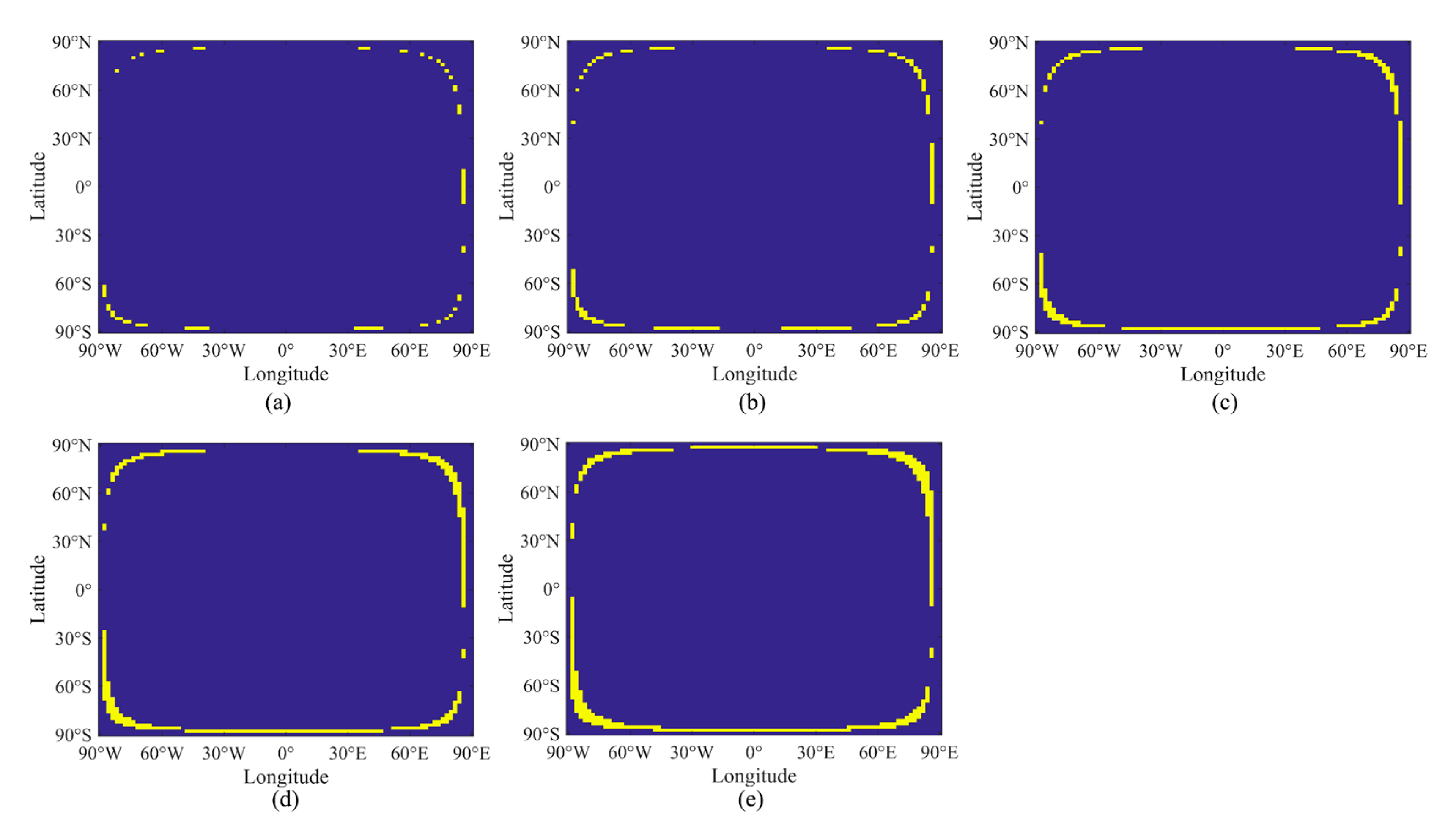
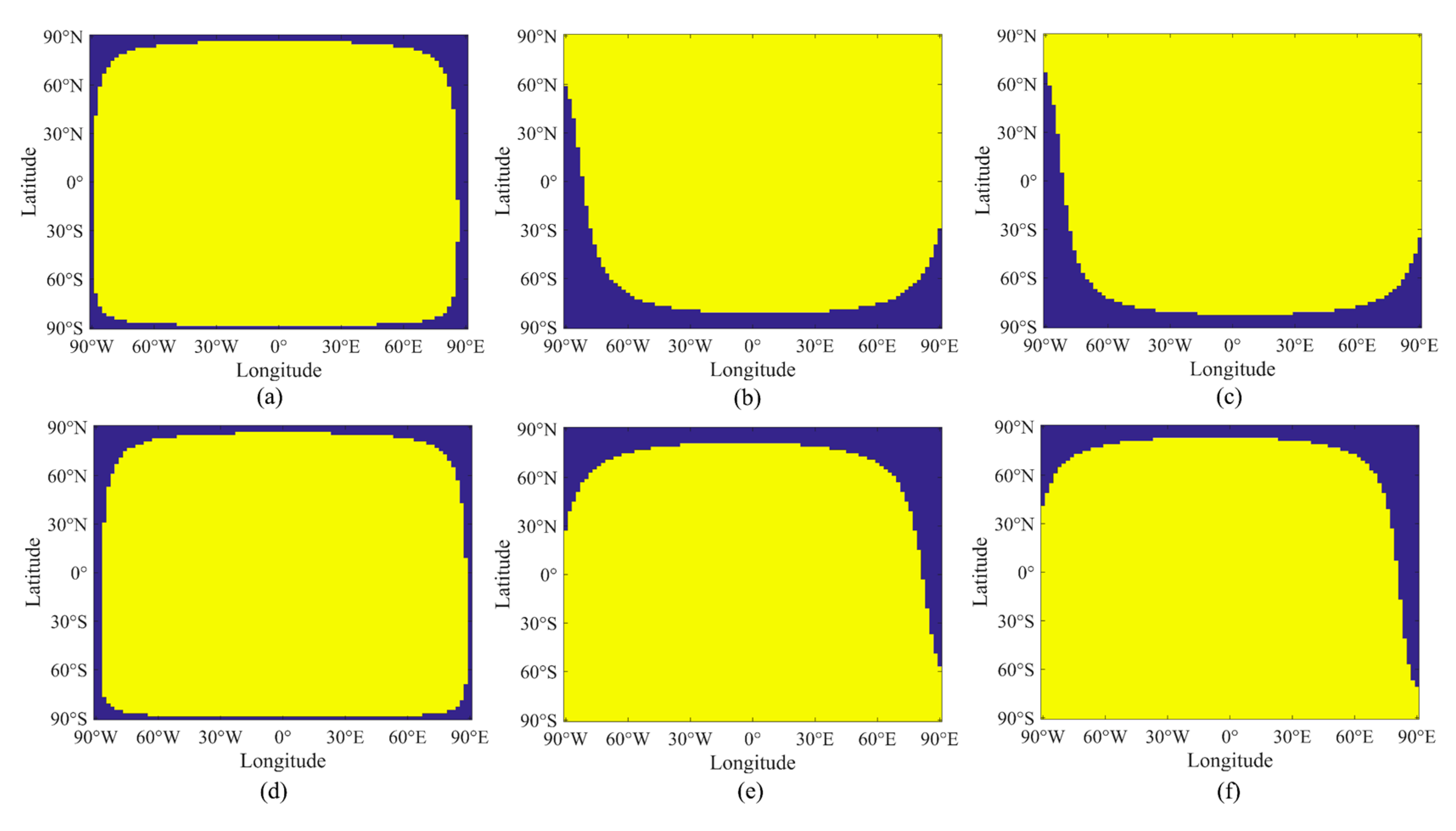
3.2. Spatio-Temporal Coverage Performance at Different Positions on the Lunar Surface
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Global Climate Observing System | GCOS |
| Global Ocean Observing System | GOOS |
| Global Ocean Observing System | GTOS |
| European Space Agency | ESA |
| Long-Term Data Preservation | LTDP |
| Deep Space Climate Observatory | DSCOVR |
| synthetic aperture radar | SAR |
| Symposium on Space Earth Science | SESS |
| China Space Science Assembly | CSSA |
| International Terrestrial Reference System | ITRS |
| Geocentric Celestial Reference System | GCRS |
| International Celestial Reference System | ICRS |
| Selenographic coordinate system | SCS |
| Moon-centered Moon-fixed coordinate system | MCMF |
| Mean Earth | ME |
| Lunar reference system | LRS |
| Principal Axis | PA |
| Earth Orientation Parameters | EOP |
| Development Ephemeris | DE |
| Jet Propulsion Laboratory | JPL |
Appendix A

References
- Karl, T.; Bretherton, F.; Easterling, W.; Miller, C.; Trenberth, K. Long-Term Climate Monitoring by the Global Climate Observing System (GCOS). Clim. Chang. 1995, 31, 135–147. [Google Scholar] [CrossRef]
- Woods, J. The global ocean observing system. Mar. Policy 1994, 18, 445–452. [Google Scholar] [CrossRef]
- Heal, O.W.; Menaut, J.C.; Steffen, W.L. Towards a Global Terrestrial Observing System, (GTOS); Detecting and Monitoring Change in Terrestrial Ecosystems; ASME Press: Montpellier, France, 1993. [Google Scholar]
- Houghton, J.; Townshend, J.; Dawson, K.; Mason, P.; Zillman, J.; Simmons, A. The GCOS at 20 years: The origin, achievement and future development of the Global Climate Observing System. Weather 2012, 67, 227–235. [Google Scholar] [CrossRef]
- Molch, K.; Leone, R.; Albani, M.; Mikusch, E. User needs and requirements impacting the long term preservation of earth observation data. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Guo, H.; Liu, G.; Ding, Y. Moon-based Earth observation: Scientific concept and potential applications. Int. J. Digit. Earth 2018, 11, 546–557. [Google Scholar] [CrossRef]
- Gore, A. Deep Space Climate Observatory; National Aeronautics and Space Administration: Washington, DC, USA, 2015. [Google Scholar]
- Vogler, L.E. A Study of Lunar Surface Radio Communication; Technical Report Archive & Image Library, United States Government Printing Office: Washington, DC, USA, 1964.
- Sawyer, R.S. New Apollo Lunar Communications. In Proceedings of the Space and Communication-Acquisition and Transmission of Data in Space Applications Systems International Conference, Paris, France, 6 August 2013. [Google Scholar]
- Hwu, S.; Matthew, U.; Sham, C. Lunar Surface Propagation Modeling and Effects on Communications. In Proceedings of the 26th International Communications Satellite Systems Conference (ICSSC), San Diego, CA, USA, 10–12 June 2008. [Google Scholar]
- Foing, B.H. The Moon as a platform for astronomy and space science. Adv. Space Res. 1996, 18, 17–23. [Google Scholar] [CrossRef]
- Guo, H.D.; Fu, W.; Li, X.; Chen, P.; Liu, G.; Li, Z.; Wang, C.; Dong, Q.; Lei, L.; Bai, L.; et al. Research on global change scientific satellites. Sci. China Earth Sci. 2013, 57, 204–215. [Google Scholar] [CrossRef]
- Guo, H. Earth system observation from space: From scientific satellite to Moonbased platform. J. Remote Sens. 2016, 20, 716–723. [Google Scholar]
- Ye, H.; Guo, H.; Liu, G.; Ping, J.; Guo, Q. Impacts of Platform’s Position Errors on Geolocation for a Moon-Based Sensor. IEEE Geosci. Remote Sens. Lett. 2020, 17, 112–116. [Google Scholar] [CrossRef]
- Moccia, A.; Renga, A. Synthetic Aperture Radar for Earth Observation from a Lunar Base: Performance and Potential Applications. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1034–1051. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, K.-S. On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth. Remote Sens. 2018, 10, 486. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Chen, K.-S. Temporal-Spatial Varying Background Ionospheric Effects on the Moon-Based Synthetic Aperture Radar Imaging: A Theoretical Analysis. IEEE Access 2018, 6, 66767–66786. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, K.-S. Effects of the Earth’s Curvature and Lunar Revolution on the Imaging Performance of the Moon-Based Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5868–5882. [Google Scholar] [CrossRef]
- Song, Y.; Wang, X.; Bi, S.; Wu, J.; Huang, S. Effects of solar radiation, terrestrial radiation and lunar interior heat flow on surface temperature at the nearside of the Moon: Based on numerical calculation and data analysis. Adv. Space Res. 2017, 60, 938–947. [Google Scholar] [CrossRef]
- Ren, Y.; Guo, H.; Liu, G.; Ye, H. Simulation Study of Geometric Characteristics and Coverage for Moon-Based Earth Observation in the Electro-Optical Region. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2431–2440. [Google Scholar] [CrossRef]
- Ye, H.; Guo, H.; Liu, G.; Ren, Y. Observation scope and spatial coverage analysis for earth observation from a Moon-based platform. Int. J. Remote Sens. 2017, 39, 5809–5833. [Google Scholar] [CrossRef]
- Ye, H.; Huadong, G.; Guang, L.; Yuanzhen, R. Observation duration analysis for Earth surface features from a Moon-based platform. Adv. Space Res. 2018, 62, 274–287. [Google Scholar] [CrossRef]
- Petit, G.; Brian, L. IERS Conventions (2010); Bureau International des Poids et Mesures Sevres: Parc de Saint-Cloud, France, 2010; pp. 1–179. [Google Scholar]
- Jin, W.; Xia, Y.; Tang, Z.; Wang, S. International Celestial Reference System. Prog. Astron. 1999, 17, 281–291. [Google Scholar]
- Seidelmann, P.K.; Archinal, B.A.; A’hearn, M.F.; Conrad, A.; Consolmagno, G.J.; Hestroffer, D.; Hilton, J.L.; Krasinsky, G.A.; Neumann, G.; Oberst, J. Report of the IAU/IAG Working Group on cartographic coordinates and rotational elements: 2006. Celest. Mech. Dyn. Astron. 2007, 98, 155–180. [Google Scholar] [CrossRef] [Green Version]
- GSFC. A Standardized Lunar Coordinate System for the Lunar Reconnaissance Orbiter; Goddard Space Flight Center: Greenbelt, MD, USA, 2008; p. 4. [Google Scholar]
- Lieske, J.H. Precession matrix based on IAU/1976/system of astronomical constants. Astron. Astrophys. 1979, 73, 282–284. [Google Scholar]
- Folgueira, M.; Souchay, J. Free polar motion of a triaxial and elastic body in Hamiltonian formalism: Application to the Earth and Mars. Astron. Astrophys. 2005, 432, 1101–1113. [Google Scholar] [CrossRef] [Green Version]
- Weratschnig, J.M.; Taylor, D.B.; Bell, S.A.; Hilton, J.L.; Sinclair, A.T. Computation of the quantities describing Lunar librations in the Astronomical Almanac. In Proceedings of the Journées 2010 “Systèmes de référence spatio-temporels” (JSR2010): New challenges for reference systems and numerical standards in astronomy, Paris, France, 20–22 September 2010. [Google Scholar]
- Folkner, W.M.; Williams, J.G.; Boggs, D.H.; Park, R.S.; Kuchynka, P. The Planetary and Lunar Ephemerides DE430 and DE431. Interplanet. Netw. Prog. Rep. 2014, 196, 1–81. [Google Scholar]
- Müller, J.; Biskupek, L.; Oberst, J.; Schreiber, U. Contribution of lunar laser ranging to realise geodetic reference systems. Int. Assoc. Geod. Symp. 2009, 134, 55–59. [Google Scholar] [CrossRef]
- Capitaine, N. Definition and realization of the celestial intermediate reference system. Proc. Int. Astron. Union 2008, 248, 367–373. [Google Scholar] [CrossRef] [Green Version]
- Ye, H. Looking Vector Direction Analysis for the Moon-Based Earth Observation Optical Sensor. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4488–4499. [Google Scholar] [CrossRef]
- Wang, H.; Guo, Q.; Li, A.; Liu, G.; Guo, H.; Huang, J. Comparative study on the observation duration of the two-polar regions of the Earth from four specific sites on the Moon. Int. J. Remote Sens. 2020, 41, 339–352. [Google Scholar] [CrossRef]
- Sui, Y.; Guo, H.; Liu, G.; Ren, Y. Analysis of Long-Term Moon-Based Observation Characteristics for Arctic and Antarctic. Remote Sens. 2019, 11, 2805. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Wang, C.; Wei, Y.; Lin, Y. China’s present and future lunar exploration program. Science 2019, 365, 238–239. [Google Scholar] [CrossRef]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Guo, H.; Liu, G.; Shen, G.; Ye, H.; Deng, Y.; Dong, R. Spatio-Temporal Characteristics for Moon-Based Earth Observations. Remote Sens. 2020, 12, 2848. https://doi.org/10.3390/rs12172848
Huang J, Guo H, Liu G, Shen G, Ye H, Deng Y, Dong R. Spatio-Temporal Characteristics for Moon-Based Earth Observations. Remote Sensing. 2020; 12(17):2848. https://doi.org/10.3390/rs12172848
Chicago/Turabian StyleHuang, Jing, Huadong Guo, Guang Liu, Guozhuang Shen, Hanlin Ye, Yu Deng, and Runbo Dong. 2020. "Spatio-Temporal Characteristics for Moon-Based Earth Observations" Remote Sensing 12, no. 17: 2848. https://doi.org/10.3390/rs12172848