1. Introduction
Synthetic aperture radar (SAR) is a widely used technique for earth observation due to its all-weather and day-and-night imaging acquisition, providing large scale and high resolution reflectivity image of the Earth surface and cloud-penetrating capabilities [
1]. Thus, SAR images have been widely used in many fields, such as topographic mapping, environmental protection, resource exploration, disaster monitoring, and urban planning [
1].
However, coherent combination of a large amount scatters within each resolution cell results in the inherent phenomenon of SAR: speckle [
2]. The existence of speckle increases the difficulty of SAR image processing and leads to a severe decrease of the performance for scene interpretation, such as classification and object detection [
3]. To solve this problem, many despeckling techniques for SAR images have been proposed over the last three decades, but there is still a pressing need for new methods that can efficiently eliminate speckle without sacrificing the spatial resolution [
4].
Many SAR image denoising methods have been proposed in the literature. According to the tutorials [
3,
4], early works on despeckling are deployed in the spatial domain. Boxcar filter or multi-looking, which assigns pixel with the mean of its neighbors, is a straight and simple way to remove the speckle at the cost of resolution loss [
4]. Lee filter [
5], refined Lee filter [
6], Frost filter [
7], Kuan filter [
8], and
-MAP filter [
9] all are very famous Bayesian methods in spatial domain, which were carefully designed by making assumptions on the statistical properties of reflectivity and speckle, such as distribution. Lee and Kuan worked in a very similar way where a LMMSE solution was derived by linearizing the multiplicative noise model around the mean of the noisy signal within a fixed size sliding window. Based on Lee, the refined Lee filter [
6] introduced eight edge-directed non-square windows to overcome the drawback that Lee left edge be noisy. However, in the areas with abundant texture, some artifacts may occur [
3]. Compared with Lee or Kuan, a linear combination of pixel values with a Gaussian kernel within a local window was used for Frost filter [
7], depending on the ratio of local standard deviation to local mean. The
-MAP filter [
9] assumed the intensity and speckle followed a Gamma distribution to solve a maximum a posteriori (MAP) optimization problem. This filter can despeckle the noise while preserving the edges well. However, the window size has great influence on filter’s behaviour, which is also the common failing of other spatial domain filters [
3,
10].
Some other Bayesian based methods exploit the discrete wavelet transform (DWT). Some filters work in the wavelet-homomorphic domain, i.e., log-transformed SAR data, which have been widely used. In [
11], two translation invariant wavelet transformations were investigated: the double-density DWT and the dual tree complex wavelet transformation. The despeckling was obtained by thresholdsing through nonlinear function, e.g., sigmoid function, on the subband image coefficients. In [
12,
13], the ideas of hard or soft thresholding were also used. In [
14], a filter embedding the Markov-random-filed-based image regularization in wavelet Bayesian denoising technique for speckle reduction was proposed, which had better performance than refined Lee filter. In [
15], a heavy tailed density, e.g.,
-stable distribution, was used to model the subband decompositions of logarithmically transformed SAR images. Then, a MAP estimator was designed using this priori information. Some filters work in the nonhomomorphic wavelet domain, always facing complex estimation of the parameters of the signal or speckle. In [
16], a MMSE filtering was used in the wavelet domain by means of an adaptive rescaling of the detail coefficients which outperformed the Kuan filter. In [
17], a Bayesian wavelet shrinkage factor was derived to estimate noise-free coefficients while a ratio edge detector was introduced to help the despeckling.
There are also many state-of-the-art filters which do not follow a Bayesian approach such as Bilateral filter (BF) [
18], which was first introduced for gray scale images. The nonlocal mean filter [
19], in which the weight of pixel is considered according to its similarity with surrounding pixel or patch with a function of the Euclidean distance, is also a non-Bayesian method. The NL-SAR filter [
20] proposed by Deledalle et al. adopted this nonlocal idea in which the similarity between noisy patches was defined from the noise distribution. Similarly, the block matching 3D filter (BM3D) [
21] divides image patches into 3-D arrays based on their similarity and performs a collaborative filtering procedure to obtain the 2-D estimates for all blocks. Inspired by this work, Parrilli et al. [
22] proposed SAR-BM3D by adopting a local LMMSE estimator. SAR-BM3D always has a good performance but is time consuming. Another famous non-Bayesian method filter is the total variation regularization filter (TV) [
23], which formulates the estimation problem as an optimization problem depending on the whole image. For variational methods, several regularization terms have been considered in the literature, e.g., total variation (TV) [
23], curvelets [
24], and Gaussian mixture models [
25]. Liu et al. [
26] argued that the gradients of the despeckled images are sparse, and proposed to use the
-minimization strategy to smooth the homogeneous areas while preserving significant structures in SAR images. The filters mentioned above can all be utilized for single channel SAR, but not multi-channel SAR. For single channel SAR, modulus and intensity are the most used in despeckling, and, for multi-channel SAR, the empirical covariance matrix is the most used, which carries much more information. However, the covariance matrix is more challenging in calculation. For example, some filters can easily extend the homogeneity or similarity criteria from intensity (modulus) to covariance matrix [
27,
28]. However, for the homomorphic transform approach, no variance stabilization transform is known for multi-channel SAR [
29]. In [
29], a framework called as Multi-channel Logarithm with Gaussian denoising (MuLoG) for single or multi-channel SAR despeckling was proposed, which achieves excellent performance. No matter single channel or multi-channel SAR images, the multiplicative speckle can be transformed into addictive ones using different strategies, such as homomorphic transform, and then a Gaussian filter can be embedded to solve the despeckling problem.
Our work aims to solve the single channel and multi-channel SAR despeckling using the deep learning which can learn how to denoise images from the training data directly rather than relying on predefined image priors or filters. For natural image denoising, a feed-forward denoising convolutional neural network (DnCNN) [
30] based on residual learning was designed. Residual learning directly predicts the noise rather than a noise-free image, often achieving better performance. Its extension, a fast and flexible denoising convolutional neural network (FFDNet) [
31], which takes the noise variance as input, was also proposed. In this way, a single model can handle various noise variance to get more precise denoising. More and more deep learning methods have been proposed for data restoration in SAR images [
32,
33,
34,
35]. Chierchia et. al. [
32] followed the paradigm in [
30] by proposing a convolutional neural network (SAR-CNN). To deal with the multiplicative noise, it used the homomorphic approach with coupled log and exponential transform, and redefined the loss function. This method achieves a comparable result to non-CNN based methods, but a larger number of co-registered temporal real SAR images are needed for the training. The image despeckling convolutional neural network (ID-CNN) proposed in [
33] also used a very similar network architecture to the one in [
30], which directly added multiplicative noise to natural images as training data. However, the training step is always time consuming and complicated. Besides, the authors proposed to jointly minimize both the Euclidean loss and the total variation (TV) loss to optimize the network. The methods proposed in [
34] worked with an end-to-end fashion. They designed a dilated residual network (SAR-DRN) to get a better performance in high level speckle, and the dilated convolutions enlarged the receptive field while keeping filter size and the depth of the architecture. In [
10], a deep encoder–decoder CNN network was proposed, which focused on the texture preservation. The network was an adaptation of U-Net, and allowed for the extraction of features at different scales.
To avoid the preparation of huge SAR dataset, well-designed network or loss function, and complicated training, the work in [
36] directly embedded the pre-trained CNN model [
30], which was trained on abundant nature gray images with AWGN, with the MuLoG framework [
29] for SAR despeckling, and it achieved the satisfying performance. However, the problem in [
36] is that 14 pre-trained models for specific preset noise levels were utilized. When the images have real noise levels that are not the preset ones, they are more likely to be over-smoothed (if the preset noise level is bigger than the real one) or under-smoothed (if the preset noise level is smaller than the real one). To solve this problem, we adopt a new pre-trained CNN model, FFDNet [
31]. In FFDNet, a two-dimensional noise level map is taken as an input to the model training, thus the model parameters are invariant to the noise level. In this way, only a single pre-trained model is needed to denoise images with different noise levels in preset range, i.e. [0, 75], and better denoising results will be obtained. Moreover, when the number of looks
L of SAR images is not clear, we employ the method in [
37] to find the homogeneous region in the SAR images without any interaction to estimate the noise level, i.e., the number of looks
L, as the input to the network. Combining the homogeneous region detector with FFDNet, we are able to denoise the single channel or multi-channel SAR images in an end-to-end way in the framework of MuLoG [
29].
The contributions of this paper are:
Following the work of Yang [
36], we adopt a new pre-trained CNN model, FFDNet. Taking the noise level as input to network training, FFDNet can obtain a more precise despeckling no matter what the noise level is. Combining MuLoG with pre-trained FFDNet model, this despeckling filter can not only handle single channel but also multi-channel SAR images.
We propose to use the homogeneous region detector to calculate the number of looks, L, which makes the despeckling framework work in an end-to-end way.
Experiments on simulated and real (Pol)SAR images demonstrate the superior despeckling ability of our proposed method.
The remainder of this paper is organized as follows.
Section 2 and
Section 3 introduce the proposed despeckling methods for SAR or PolSAR image, respectively. Next, experimental results are given in
Section 4. Finally, the discussion and the conclusions are presented in
Section 5 and
Section 6, respectively.
3. Despeckling Filter for PolSAR Images
PolSAR images carry more information than single channel SAR images. For the monostatic fully PolSAR images, the lexicographic scatter vector
is defined as:
where
h and
v are the polarization states and
is transposition operation. Suppose there are
L independent random scattering vector samples following the
D-dimensional complex circular Gaussian distribution,
, satisfying
(
). Then, the covariance matrix
can be defined as the mean of
’s inner product:
where
means complex conjugate transpose. According to Goodman’s model [
2], the covariance matrix follows the complex Wishart distribution
:
where
is the underlying covariance matrix and
is the speckle. Both
and
belong to the open cone of complex Hermitian positive definite matrices. To use the MuLoG algorithm [
29], the covariance matrix
should be transformed into log domain. Here, a matrix logarithm is used to convert the multiplicative speckle into additive ones,
, and the matrix exponential is defined similarly,
. The log-transformed matrix
follows the Wishart–Fisher–Tippett distribution [
29]:
After matrix log transformation, a re-parameterization method [
29] which represents the log-transformed covariance matrix
as a real vector
is proposed, denoted as
. Here, the noise in each of
’s channels
(
D = 3) is assumed to be signal independent, and the noise variance is about the same for all channels. As for PolSAR, the MAP optimization problem in Equations (
14) and (
15) is redefined as:
where
,
n is the number of pixel and
means the
kth pixel. When
, this MAP problem is exactly the same as single channel case. Finally, the estimated
can be obtained by
. To solve the MAP optimization problem, the ADMM algorithm is used. We also use the pre-trained FFDNet model as Gaussian denoiser. However, as suggested by Deledalle et al. [
29], the value of
is 1 in the initial iteration and
in the following iterations. Here, the number of iterations is also set as 6.
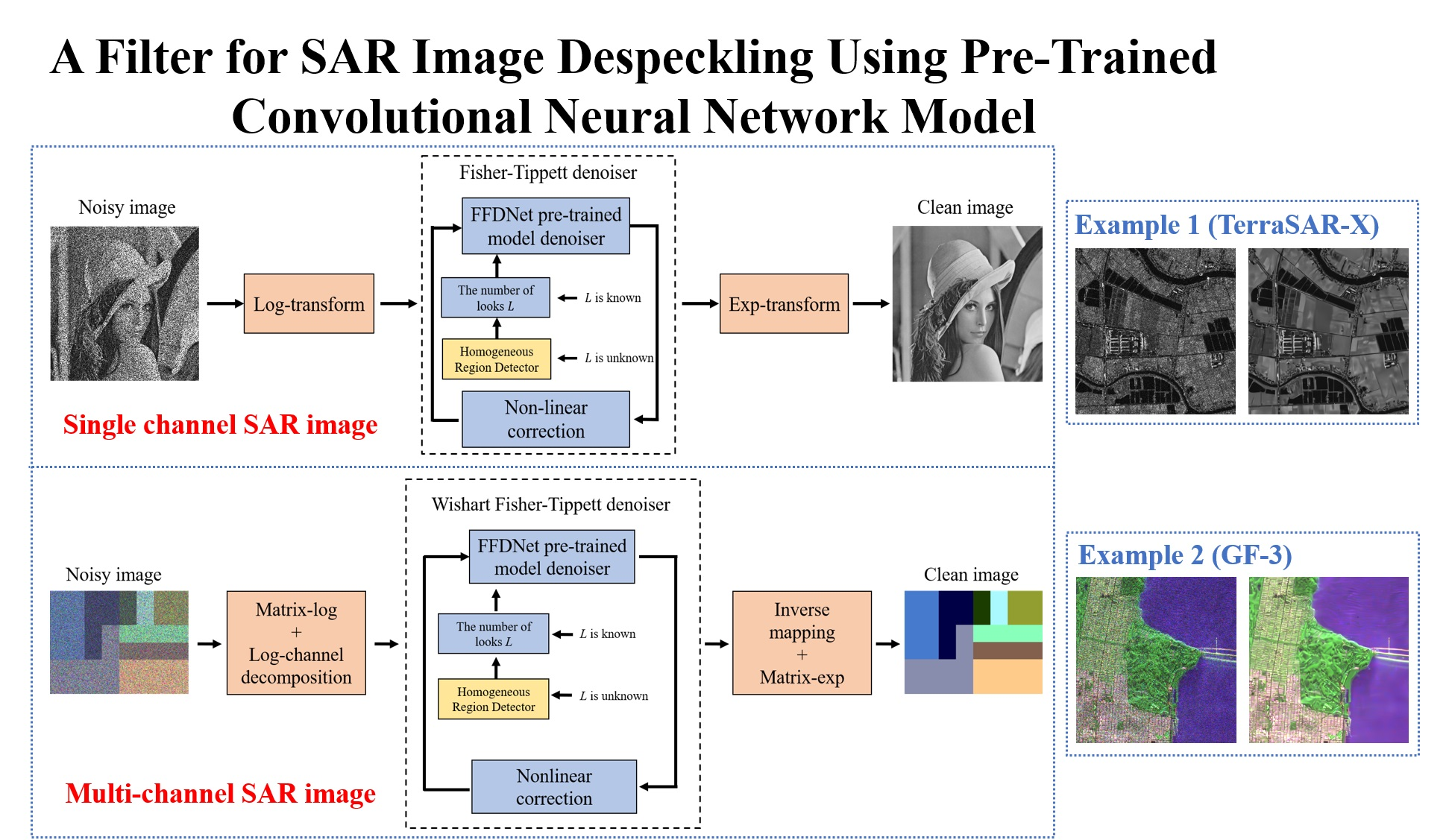
Figure 4 gives the framework of despeckling PolSAR images with pre-trained model embedded with MuLoG.
5. Discussion
Speckle reduction is a key issue for SAR images, as it affects the accuracy and effectiveness of SAR images interpretation. In this paper, we propose to use the pre-trained FFDNet model with MuLoG framework to handle single channel or multi-channel SAR images. Our objective is to design a filter which can efficiently eliminate the speckle while having a good preservation of edge and details. With the help of noise level map,
M, FFDNet based methods can solve the limitation in the methods proposed in [
36], where over-smoothing or under-smoothing occurs. In addition, the homogeneous region detector helps make the proposed methods an end-to-end process. From the experimental results for both single channel SAR images and multi-channel SAR images, we can observe that, in terms of suppressing the speckle, the MuLoG based methods have superiority compared with Homo based methods. Among MuLoG based methods, MuLoG-FFDNet performs more robustly than MuLoG-DnCNN. The MuLoG-DnCNN may leave some spots on the images sometimes, while MuLoG-FFDNet always has an effective speckle reduction at various noise levels. As for detail preservation, MuLoG based methods tend to make some details over-smoothed, but they can remove the artifacts created by Homo based methods. Observing the zoom in parts in the filtered results, MuLoG-FFDNet has a better detail preservation than MuLoG-DnCNN. MuLoG based methods also make different land objects more separable while retaining the polarimetric scattering mechanisms well. When the value of
L is unknown, the homogeneous region detector, which computes the number of looks
L automatically, also has shown a satisfactory performance at various noise levels.
Using the pre-trained CNN model directly prevents us from preparing dataset, well designed network and tedious training to obtain state-of-the-art results. Moreover, as the lack of PolSAR data, no CNN-based methods have been proposed to despeckle PolSAR images. Maybe, a pre-trained filter on SAR images can be used to solve this problem embedded with MuLoG framework.
However, looking carefully at the filtered results of MuLoG-FFDNet, we can see the halo artifacts exist around the edges. Recently, a very simple but efficient idea to improve filter’s edge preservation capacity, called Side Window [
51] has been proposed. Side Window changes the traditional center-based window into a side-based window, and can effectively restrain halo around edges. Although, the MuLoG framework is a non-patch based method, but the idea of Side Window can be used in the CNN network to train a filter with superior edge and detail preservation capacity in the future.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}