A Synergetic Analysis of Sentinel-1 and -2 for Mapping Historical Landslides Using Object-Oriented Random Forest in the Hyrcanian Forests


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Description of Study Area
2.2. Landslide Surveying, Image Collections, and Ancillary Data
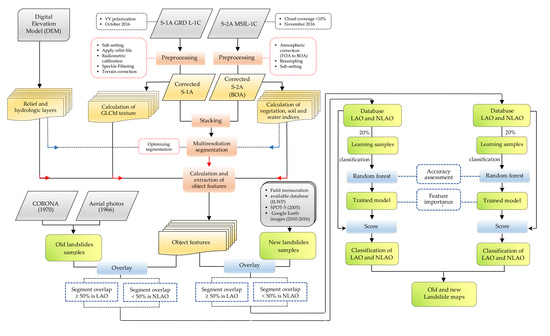
2.3. Landslide Mapping
2.3.1. Image Segmentation and Object Features

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Features | Statistics | Feature Source (No.) | |||
|---|---|---|---|---|---|---|
| S11 | S22 | S1S2 | D3 | |||
| VV Polarization and spectral layers | VV, B 4, G 5, R 6, RE1 7, RE2 8, RE3 9, NNI 10, SWIR1, SWR2 | Mean, StdDev., pixel ratio, brightness, max diff. | 3 | 27 | 5 | - |
| Spectral indices | Vegetation 11: NDVI, DVI, RVI, PVI, IPVI, WDVI, TNDVI, GNDVI, GEMI, ARVI, NDI45, MTCI, REIP, S2REP, IRECI, PSSRa, MCARI, EVI2 | Mean, StdDev. | - | 36 | - | - |
| Soil 12: SAVI, TSAVI, MSAVI, MSAVI2, BI, BI2, RI, CI | - | 16 | - | - | ||
| Water 13: NDWI, NDWI2, MNDWI, NDPI, NDTI | - | 10 | - | - | ||
| Geometry | Extent Shape | Area, length/width, shape index, roundness, compactness, main direction, density, asymmetry | - | - | 8 | - |
| Contextual | Mean diff. to neighbors | VV, B, G, R, RE1, RE2, RE3, NNI, SWIR1, SWR2, NDVI, EVI2, BI | 1 | 9 | 1 | - |
| Textural | GLCM 14 all direction (asymmetry, angular 2nd moment, correlation, contrast, dissimilarity, energy, entropy, homogeneity, maximum probability, mean, StdDev.) | VV, B, G, R, RE1, RE2, RE3, NNI, SWIR1, SWR2, NDVI, EVI2, BI, NDWI2, elevation, slope, TRI, FDR 15, TWI | 11 | 117 | 9 | 45 |
| Topography | Elevation, hillshade, slope, aspect, curvature, plan curvature, profile curvature, TCI 16, TPI 17, TRI 18 | Mean, StdDev. | - | - | - | 20 |
| Hydrology | FDR, TWI 19 | Mean, StdDev. | - | - | - | 4 |
2.3.2. Classification by Random Forest
3. Results
3.1. Landslide Mapping
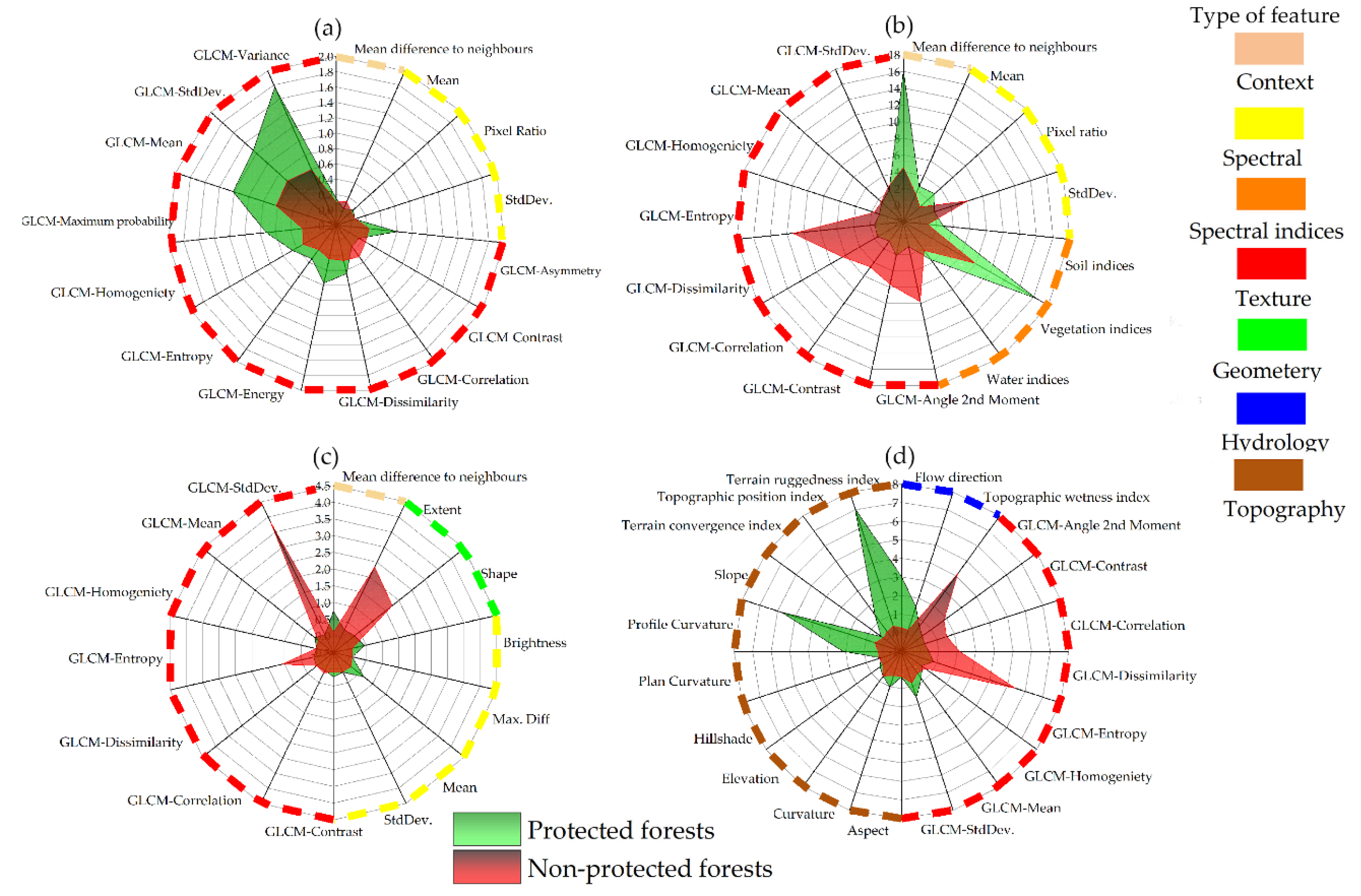
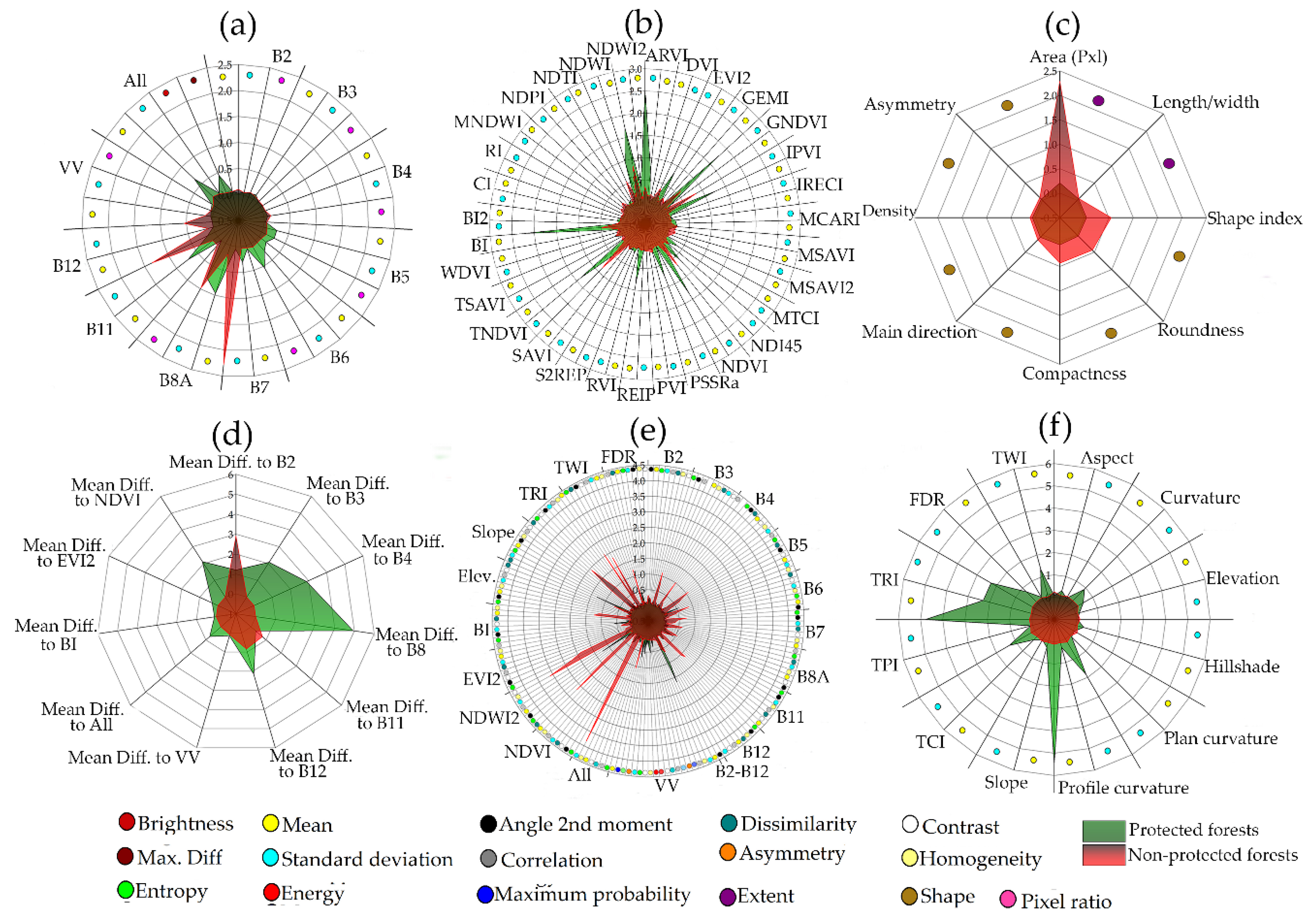
3.2. The Importance of Object Features
4. Discussion
4.1. Landslide Mapping Accuracy
4.2. The Importance of Object Features for Mapping Old Landslides
4.3. The Importance of Object Features for Mapping New Landslides
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
| Characteristics | |
|---|---|
| Band | C-band |
| Wavelength | C-band (3.75–7.5 cm) |
| Product type | Ground Range Detected (GRD) |
| Polarization | Single (VV) |
| Orbit type | Ascending |
| Pixel spacing | 10 × 10 m (range × azimuth) |
| Incidence angle (˚) | 30.6–46.0 |
| Band | Spatial Resolution | Spectral Resolution |
|---|---|---|
| B1 Aerosol Ultra blue | 60 m | 433–453 nm |
| B2 Blue | 10 m | 458–523 nm |
| B3 Green | 10 m | 543–578 nm |
| B4 Red | 10 m | 650–680 nm |
| B5 Red-edge 1 Visible and Near Infrared | 20 m | 698–713 nm |
| B6 Red-edge 2 Visible and Near Infrared | 20 m | 733–748 nm |
| B7 Red-edge 3 Visible and Near Infrared | 20 m | 765–785 nm |
| B8 Wide near infrared wide | 10 m | 785–900 nm |
| B8A Narrow near infrared | 20 m | 855–875 nm |
| B9 Cloud | 60 m | 930–950 nm |
| B10 Water vapor SWIR | 60 m | 1365–1358 nm |
| B11 SWIR1 Short Wave Infrared | 20 m | 1565–1655 nm |
| B12 SWIR2 Short Wave Infrared | 20 m | 2100–2280 nm |
References
- Barra, A.; Solari, L.; Béjar-Pizarro, M.; Monserrat, O.; Bianchini, S.; Herrera, G.; Crosetto, M.; Sarro, R.; González-Alonso, E.; Mateos, R. A methodology to detect and update active deformation areas based on sentinel-1 SAR images. Remote Sens. 2017, 9, 1002. [Google Scholar] [CrossRef]
- Solari, L.; Del Soldato, M.; Montalti, R.; Bianchini, S.; Raspini, F.; Thuegaz, P.; Bertolo, D.; Tofani, V.; Casagli, N. A Sentinel-1 based hot-spot analysis: Landslide mapping in north-western Italy. Int. J. Remote Sens. 2019, 40, 7898–7921. [Google Scholar] [CrossRef]
- Qin, Y.; Lu, P.; Li, Z. Landslide inventory mapping from bitemporal 10 m Sentinel-2 images using change detection based Markov Random Field. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1447–1452. [Google Scholar] [CrossRef]
- Jelének, J.; Kopačková, V.; Fárová, K. Post-earthquake landslide distribution assessment using sentinel-1 and -2 data: The example of the 2016 mw 7.8 earthquake in New Zealand. Proceedings 2018, 2, 361. [Google Scholar] [CrossRef]
- Veblen, T.T.; Ashton, D.H. Catastrophic influences on the vegetation of the Valdivian Andes, Chile. Vegetatio 1978, 36, 149–167. [Google Scholar] [CrossRef]
- Cao, W.; Tong, X.H.; Liu, S.C.; Wang, D. Landslides extraction from diverse remote sensing data sources using semantic reasoning scheme. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, XLI-B8, 25–31. [Google Scholar] [CrossRef]
- Zhao, C.; Lu, Z. Remote sensing of landslides—A review. Remote Sens. 2018, 10, 279. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Combining Random Forests and object-oriented analysis for landslide mapping from very high resolution imagery. Procedia Environ. Sci. 2011, 3, 123–129. [Google Scholar] [CrossRef] [Green Version]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Sun, W.; Tian, Y.; Mu, X.; Zhai, J.; Gao, P.; Zhao, G. Loess landslide inventory map based on GF-1 satellite imagery. Remote Sens. 2017, 9, 314. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Jetten, V.; van Westen, C.J.; Kumar, K.V. Characterising spectral, spatial and morphometric properties of landslides for semi-automatic detection using object-oriented methods. Geomorphology 2010, 116, 24–36. [Google Scholar] [CrossRef]
- Dou, J.; Chang, K.-T.; Chen, S.; Yunus, A.; Liu, J.-K.; Xia, H.; Zhu, Z. Automatic case-based reasoning approach for landslide detection: Integration of object-oriented image analysis and a genetic algorithm. Remote Sens. 2015, 7, 4318–4342. [Google Scholar] [CrossRef]
- Hölbling, D.; Betts, H.; Spiekermann, R.; Phillips, C. Identifying spatio-temporal landslide hotspots on north island, New Zealand, by analyzing historical and recent aerial photography. Geosciences 2016, 6, 48. [Google Scholar] [CrossRef]
- Barlow, J.; Martin, Y.; Franklin, S.E. Detecting translational landslide scars using segmentation of Landsat ETM+ and DEM data in the northern Cascade Mountains, British Columbia. Can. J. Remote Sens. 2003, 29, 510–517. [Google Scholar] [CrossRef]
- Aksoy, B.; Ercanoglu, M. Landslide identification and classification by object-based image analysis and fuzzy logic: An example from the Azdavay region (Kastamonu, Turkey). Comput. Geosci. 2012, 38, 87–98. [Google Scholar] [CrossRef]
- Yang, S.; Li, Y.; Feng, G.; Zhang, L. A method aimed at automatic landslide extraction based on background values of satellite imagery. Int. J. Remote Sens. 2014, 35, 2247–2266. [Google Scholar]
- Hölbling, D.; Friedl, B.; Eisank, C. An object-based approach for semi-automated landslide change detection and attribution of changes to landslide classes in northern Taiwan. Earth Sci. Inform. 2015, 8, 327–335. [Google Scholar] [CrossRef] [Green Version]
- Casagli, N.; Cigna, F.; Bianchini, S.; Hölbling, D.; Füreder, P.; Righini, G.; Del Conte, S.; Friedl, B.; Schneiderbauer, S.; Iasio, C.; et al. Landslide mapping and monitoring by using radar and optical remote sensing: Examples from the EC-FP7 project SAFER. Remote Sens. Appl. Soc. Environ. 2016, 4, 92–108. [Google Scholar] [CrossRef] [Green Version]
- Ding, A.; Zhang, Q.; Zhou, X.; Dai, B. Automatic recognition of landslide based on CNN and texture change detection. In Proceedings of the 31st Youth Academic Annual Conference of Chinese Association of Automation, Wuhan, China, 11–13 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 444–448. [Google Scholar]
- Veena, V.S.; Sai, S.G.; Tapas, R.M.; Deepak, M.; Rama, R.N. Automatic detection of landslides in object-based environment using open source tools. In Proceedings of the GEOBIA 2016, Solutions and synergies, Enschede, The Netherlands, 14–16 September 2016. [Google Scholar] [CrossRef]
- Le, T.T.T.; Kawagoe, S. Landslide detection analysis in North Vietnam base on satellite images and digital geographical Information-Landsat 8 satellite and historical data Approaches. J. JSCE Ser. G 2017, 73. [Google Scholar] [CrossRef]
- Sengar, S.S.; Ghosh, S.K.; Kumar, A.; Chaudhary, H. Landslide identification from IRS-P6 LISS-IV temporal data-a comparative study using fuzzy based classifiers. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-3/W4, 461–467. [Google Scholar] [CrossRef]
- Moine, M.; Puissant, A.; Malet, J.P. Detection of landslides from aerial and satellite images with a semi-automatic method. Application to the Barcelonnette Basin (Alps-de-Haute-Provence). In Landslide Processes: From Geomorphological Mapping to Dynamic Modelling; Malet, J.-P., Remaitre, A., Bogaard, T., Eds.; CERG: Strasbourg, France, 2009; pp. 63–68. [Google Scholar]
- Hervás, J.; Rosin, P.L. Landslide mapping by textural analysis of ATM data. In Proceedings of the Eleventh Thematic Conference and Workshops on Applied Geologic Remote Sensing, Las Vegas, NV, USA, 27–29 February 1996; pp. II394–II402. [Google Scholar]
- Cui, M.; Prasad, S.; Mahrooghy, M.; Aanstoos, J.V.; Lee, M.A.; Bruce, L.M. Decision fusion of textural features derived from polarimetric data for Levee assessment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 970–976. [Google Scholar] [CrossRef]
- Blaschke, T.; Feizizadeh, B.; Holbling, D. Object-based image analysis and digital terrain analysis for locating landslides in the Urmia Lake Basin, Iran. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4806–4817. [Google Scholar] [CrossRef]
- Chen, W.; Li, X.; Wang, Y.; Chen, G.; Liu, S. Forested landslide detection using LiDAR data and the random forest algorithm: A case study of the Three Gorges, China. Remote Sens. Environ. 2014, 152, 291–301. [Google Scholar] [CrossRef]
- Li, X.; Cheng, X.; Chen, W.; Chen, G.; Liu, S. Identification of forested landslides using LiDar data, object-based image analysis, and machine learning algorithms. Remote Sens. 2015, 7, 9705–9726. [Google Scholar] [CrossRef]
- Feizizadeh, B.; Blaschke, T.; Tiede, D.; Moghaddam, M.H.R. Evaluating fuzzy operators of an object-based image analysis for detecting landslides and their changes. Geomorphology 2017, 293, 240–254. [Google Scholar] [CrossRef]
- Attarzadeh, R.; Amini, J.; Notarnicola, C.; Greifeneder, F. Synergetic use of Sentinel-1 and Sentinel-2 data for soil moisture mapping at plot scale. Remote Sens. 2018, 10, 1285. [Google Scholar] [CrossRef]
- Barlow, J.; Franklin, S.; Martin, Y. High spatial resolution satellite imagery, DEM derivatives, and image segmentation for the detection of mass wasting processes. Photogramm. Eng. Remote Sens. 2006, 72, 687–692. [Google Scholar] [CrossRef]
- Stumpf, A.; Lachiche, N.; Kerle, N.; Malet, J.P.; Puissant, A. Adaptive spatial sampling with active random forest for object-oriented landslide mapping. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Martha, T.R.; Kerle, N.; Van Westen, C.J.; Jetten, V.; Vinod Kumar, K. Object-oriented analysis of multi-temporal panchromatic images for creation of historical landslide inventories. ISPRS J. Photogramm. Remote Sens. 2012, 67, 105–119. [Google Scholar] [CrossRef]
- Colesanti, C.; Wasowski, J. Investigating landslides with space-borne Synthetic Aperture Radar (SAR) interferometry. Eng. Geo. 2006, 88, 173–199. [Google Scholar] [CrossRef]
- Notti, D.; Davalillo, J.C.; Herrera, G.; Mora, O. Assessment of the performance of X-band satellite radar data for landslide mapping and monitoring: Upper Tena Valley case study. Nat. Hazards Earth Syst. Sci. 2010, 10, 1865–1875. [Google Scholar] [CrossRef]
- Raspini, F.; Ciampalini, A.; Del Conte, S.; Lombardi, L.; Nocentini, M.; Gigli, G.; Ferretti, A.; Casagli, N. Exploitation of amplitude and phase of satellite SAR images for landslide mapping: The case of Montescaglioso (South Italy). Remote Sens. 2015, 7, 14576–14596. [Google Scholar] [CrossRef]
- Mondini, A. Measures of spatial autocorrelation changes in multitemporal SAR images for event landslides detection. Remote Sens. 2017, 9, 554. [Google Scholar] [CrossRef]
- Delacourt, C.; Raucoules, D.; Le Mouélic, S.; Carnec, C.; Feurer, D.; Allemand, P.; Cruchet, M. Observation of a large landslide on La Reunion Island using differential SAR interferometry (JERS and Radarsat) and correlation of optical (Spot5 and Aerial) images. Sensors 2009, 9, 616–630. [Google Scholar] [CrossRef] [PubMed]
- Plank, S.; Twele, A.; Martinis, S. Landslide mapping in vegetated areas using change detection based on optical and polarimetric SAR data. Remote Sens. 2016, 8, 307. [Google Scholar] [CrossRef]
- Plank, S.; Hölbling, D.; Eisank, C.; Friedl, B.; Martinis, S.; Twele, A. Comparing object-based landslide detection methods based on polarimetric SAR and optical satellite imagery—A case study in Taiwan. In Proceedings of the 7th International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry, POLinSAR 2015, Frascati, Italy, 27–30 January 2015; pp. 27–30. [Google Scholar]
- Hölbling, D.; Eisank, C.; Albrecht, F.; Vecchiotti, F.; Friedl, B.; Weinke, E.; Kociu, A. Comparing manual and semi-automated landslide mapping based on optical satellite images from different sensors. Geosciences 2017, 7, 37. [Google Scholar] [CrossRef]
- Barra, A.; Monserrat, O.; Mazzanti, P.; Esposito, C.; Crosetto, M.; Scarascia, G. Potentiality of SENTINEL-1 for landslide detection: First results in the Molise Region (Italy). In Proceedings of the European Geosciences Union General Assembly; Geophysical Research Abstracts; Vol. 18, EGU2016–2916, Vienna, Austria, 17–22 April 2016. [Google Scholar]
- Barra, A.; Monserrat, O.; Mazzanti, P.; Esposito, C.; Crosetto, M.; Scarascia Mugnozza, G. First insights on the potential of Sentinel-1 for landslides detection. Geomat. Nat. Hazards Risk 2016, 7, 1874–1883. [Google Scholar] [CrossRef] [Green Version]
- Barra, A.; Monserrat, O.; Crosetto, M.; Cuevas-Gonzalez, M.; Devanthéry, N.; Luzi, G.; Crippa, B. Sentinel-1 Data Analysis for Landslide Detection and Mapping: First Experiences in Italy and Spain. In 2017—Advancing Culture of Living; Mikoš, A., Ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 201–208. [Google Scholar] [Green Version]
- Fiaschi, S.; Mantovani, M.; Frigerio, S.; Pasuto, A.; Floris, M. Testing the potential of Sentinel-1A TOPS interferometry for the detection and monitoring of landslides at local scale (Veneto Region, Italy). Environ. Earth Sci. 2017, 76, 1874. [Google Scholar] [CrossRef]
- Kovács, I.P.; Bugya, T.; Czigány, S.; Defilippi, M.; Lóczy, D.; Riccardi, P.; Ronczyk, L.; Pasquali, P. How to avoid false interpretations of Sentinel-1A TOPSAR interferometric data in landslide mapping? A case study: Recent landslides in Transdanubia, Hungary. Nat. Hazards 2019, 96, 693–712. [Google Scholar] [CrossRef]
- Kyriou, A.; Nikolakopoulos, K. Assessing the suitability of Sentinel-1 data for landslide mapping. Eur. J. Remote Sens. 2018, 51, 402–411. [Google Scholar] [CrossRef] [Green Version]
- Mondini, A.; Santangelo, M.; Rocchetti, M.; Rossetto, E.; Manconi, A.; Monserrat, O. Sentinel-1 SAR amplitude imagery for rapid landslide detection. Remote Sens. 2019, 11, 760. [Google Scholar] [CrossRef]
- Stumpf, A.; Marc, O.; Malet, J.; Michea, D. Sentinel-2 for rapid operational landslide inventory mapping. In Proceedings of the 19th EGU General Assembly; Geophysical Research Abstracts, Vol. 19, EGU2017–4449, Vienna, Austria, 23–28 April 2017. [Google Scholar]
- Kyriou, A.; Nikolakopoulos, K.G. A synergy of radar and optical data of Copernicus programme for landslide mapping. In Proceedings of the Earth Resources and Environmental Remote Sens./GIS Applications IX, Berlin, Germany, 10–13 September 2018; Michel, U., Schulz, K., Eds.; SPIE: Bellingham, WA, USA, 2018; Volume 10790, pp. 107900G-1–107900G-10. [Google Scholar] [CrossRef]
- Chen, T.; Trinder, J.; Niu, R. Object-Oriented landslide mapping using ZY-3 satellite imagery, Random Forest and mathematical morphology, for the Three-Gorges Reservoir, China. Remote Sens. 2017, 9, 333. [Google Scholar] [CrossRef]
- Mayr, A.; Rutzinger, M.; Bremer, M.; Oude Elberink, S.; Stumpf, F.; Geitner, C. Object-based classification of terrestrial laser scanning point clouds for landslide monitoring. Photogramm. Rec. 2017, 32, 377–397. [Google Scholar] [CrossRef] [Green Version]
- Park, N.-W.; Chi, K.-H. Quantitative assessment of landslide susceptibility using high-resolution remote sensing data and a generalized additive model. Int. J. Remote Sens. 2008, 29, 247–264. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Körting, T.S.; Garcia Fonseca, L.M.; Câmara, G. GeoDMA—Geographic data mining analyst. Comput. Geosci. 2013, 57, 133–145. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Salford Systems Ltd. Salford Predictive Modeller: Introduction to Random Forests. Available online: https://www.salford-systems.com/support/spm-user-guide/help/randomforests (accessed on 2 October 2019).
- Pradhan, B.; Alsaleh, A. A supervised object-based detection of landslides and man-made slopes using airborne laser scanning data. In Laser Scanning Applications in Landslide Assessment; Pradhan, B., Ed.; Springer International Publishing: Cham, Germany, 2017; pp. 23–50. [Google Scholar]
- Pradhan, B.; Mezaal, M.R. Optimized rule sets for automatic landslide characteristic detection in a highly vegetated forests. In Laser Scanning Applications in Landslide Assessment; Pradhan, B., Ed.; Springer International Publishing: Cham, Germany, 2017; pp. 51–68. [Google Scholar]
- Pradhan, B.; Seeni, M.I.; Nampak, H. Integration of LiDAR and QuickBird data for automatic landslide detection using object-based analysis and random forests. In Laser Scanning Applications in Landslide Assessment; Springer: Cham, The Netherlands, 2017; pp. 69–81. [Google Scholar]
- Mezaal, M.; Pradhan, B.; Rizeei, H. Improving landslide detection from airborne laser scanning data using optimized Dempster–Shafer. Remote Sens. 2018, 10, 1029. [Google Scholar] [CrossRef]
- Sagheb Talebi, K.; Sajedi, T.; Pourhashemi, M. Forests of Iran; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Abdi, O.; Shirvani, Z.; Buchroithner, M.F. Spatiotemporal drought evaluation of Hyrcanian deciduous forests and semi-steppe rangelands using moderate resolution imaging spectroradiometer time series in Northeast Iran. Land Degrad. Develop. 2018, 29, 2525–2541. [Google Scholar] [CrossRef]
- Abdi, O.; Shirvani, Z.; Buchroithner, M.F. Forest drought-induced diversity of Hyrcanian individual-tree mortality affected by meteorological and hydrological droughts by analyzing moderate resolution imaging spectroradiometer products and spatial autoregressive models over northeast Iran. Agric. For. Meteorol. 2019, 275, 265–276. [Google Scholar] [CrossRef]
- Abdi, O.; Kamkar, B.; Shirvani, Z.; Teixeira da Silva, J.A.; Buchroithner, M.F. Spatial-statistical analysis of factors determining forest fires: A case study from Golestan, Northeast Iran. Geomat. Nat. Hazards Risk 2018, 9, 267–280. [Google Scholar] [CrossRef]
- Abdi, O. Climate-Triggered Insect Defoliators and Forest Fires Using Multitemporal Landsat and TerraClimate Data in NE Iran: An Application of GEOBIA TreeNet and Panel Data Analysis. Sensors 2019, 19, 3965. [Google Scholar] [CrossRef] [PubMed]
- Shirvani, Z.; Abdi, O.; Buchroithner, M.F.; Pradhan, B. Analysing spatial and statistical dependencies of deforestation affected by residential growth: Gorganrood basin, Northeast Iran. Land Degrad. Develop. 2017, 28, 2176–2190. [Google Scholar] [CrossRef]
- Iranian Landslide Working Party (ILWP). Iranian Landslides List; Forest, Rangeland and Watershed Association: Tehran, Iran, 2007; 60p. [Google Scholar]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. Proceedings 2019, 18, 11. [Google Scholar] [CrossRef]
- Rouse Jr, J.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. Nasa Spec. Publ. 1973, 351, 309. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Pearson, R.L.; Miller, L.D. Remote mapping of standing crop biomass for estimation of the productivity of the shortgrass prairie. In Proceedings of the Remote Sensing of Environment, VIII, ERIM, Ann Arbor, MI, USA, 2–6 October 1972; pp. 1355–1379. [Google Scholar]
- Richardson, A.J.; Wiegand, C.L. Distinguishing vegetation from soil background information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Crippen, R. Calculating the vegetation index faster. Remote Sens. Environ. 1990, 34, 71–73. [Google Scholar] [CrossRef]
- Clevers, J. The derivation of a simplified reflectance model for the estimation of leaf area index. Remote Sens. Environ. 1988, 25, 53–69. [Google Scholar] [CrossRef]
- Deering, D.W.; Rouse, J.W.; Haas, R.H.; Schell, J.A. Measuring” forage production” of grazing units from Landsat MSS data. In Proceedings of the Tenth International Symposium of Remote Sensing of the Environment, ERIM, Ann Arbor, MI, USA, 23–25 August 1975; pp. 1169–1178. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Pinty, B.; Verstraete, M.M. GEMI: A non-linear index to monitor global vegetation from satellites. Vegetatio 1992, 101, 15–20. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Tanre, D. Atmospherically resistant vegetation index (ARVI) for EOS-MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 261–270. [Google Scholar] [CrossRef]
- Delegido, J.; Verrelst, J.; Alonso, L.; Moreno, J. Evaluation of Sentinel-2 red-edge bands for empirical estimation of green LAI and chlorophyll content. Sensors 2011, 11, 7063–7081. [Google Scholar] [CrossRef] [PubMed]
- Dash, J.; Curran, P.J. The MERIS terrestrial chlorophyll index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- Guyot, G.; Baret, F. Utilisation de la Haute Resolution Spectrale pour Suivre L’etat des Couverts Vegetaux. Spectr. Signat. Objects Remote Sens. 1988, 287, 279. [Google Scholar]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of Sentinel-2 for quantitative estimation of biophysical variables in vegetation. ISPRS J. Photogramm. Remote Sens. 2013, 82, 83–92. [Google Scholar] [CrossRef] [Green Version]
- Clevers, J.G.P.W.; Jong, S.M.; De Epema, G.F.; Addink, E.A. Meris and the Red-edge index. In Second 747 EARSeL Workshop Imaging Spectroscopy; EARSeL: Enschede, The Netherlands, 2000. [Google Scholar]
- Blackburn, G.A. Quantifying chlorophylls and caroteniods at leaf and canopy scales. Remote Sens. Environ. 1998, 66, 273–285. [Google Scholar] [CrossRef]
- Daughtry, C. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Baret, F.; Guyot, G.; Major, D.J. TSAVI: A vegetation index which minimizes soil brightness effects on LAI and APAR estimation. In Proceedings of the 12th IEEE Canadian Symposium on Remote Sensing Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 10–14 July 1989; pp. 1355–1358. [Google Scholar]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Qi, J.; Kerr, Y.; Chehbouni, A. External factor consideration in vegetation index development. In Proceedings of the 6th International Symposium on Physical Measurements and Signatures in Remote Sensing, Val D’Isere, France, 17–22 January 1994; pp. 723–730. [Google Scholar]
- Escadafal, R. Remote sensing of arid soil surface color with Landsat thematic mapper. Adv. Space Res. 1989, 9, 159–163. [Google Scholar] [CrossRef]
- Pouget, M.; Madeira, J.; Le Floch, E.; Kamal, S. Caracteristiques spectrales des surfaces sableuses de la region cot&e Nord-Ouest de I’Egypte: Application aux don&es satellitaires SPOT. In Proceedings of the 2eme JoumCes de T&detection: Caracterisation et Suivi des Milieux Terrestres en Regions Arides et Tropicales, Ed. ORSTOM, Collection Colloques et Seminaires, Paris, France, 4–6 December 1990; pp. 27–38. [Google Scholar]
- Gao, B.-C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Lacaux, J.P.; Tourre, Y.M.; Vignolles, C.; Ndione, J.A.; Lafaye, M. Classification of ponds from high-spatial resolution remote sensing: Application to Rift Valley Fever epidemics in Senegal. Remote Sens. Environ. 2007, 106, 66–74. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 610–621. [Google Scholar] [CrossRef]
- Köthe, R.; Lehmeier, F. SARA-system zur automatischen relief-analyse. User Manual. Unpublished work. 1996. [Google Scholar]
- Wilson, J.P.; Gallant, J.C. Terrain Analysis: Principles and Applications; Wilson, J.P., Gallant, J.C., Eds.; John Wiley & Sons: New York, NY, USA, 2000; ISBN 0471321885. [Google Scholar]
- Riley, S.J.; DeGloria, S.D.; Elliot, R. Index that quantifies topographic heterogeneity. Intermt. J. Sci. 1999, 5, 23–27. [Google Scholar]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Frattini, P.; Crosta, G.; Carrara, A. Techniques for evaluating the performance of landslide susceptibility models. Eng. Geol. 2010, 111, 62–72. [Google Scholar] [CrossRef]
- Park, S.; Kim, J. Landslide susceptibility mapping based on random forest and boosted regression tree models, and a comparison of their performance. Appl. Sci. 2019, 9, 942. [Google Scholar] [CrossRef]









| Metrics | Specificity (%) | Sensitivity (%) | Precision (%) | Kappa (%) | Neg.Av.LL 1 (%) | ROC 2 (%) |
|---|---|---|---|---|---|---|
| PF 3 | 85.00 | 86.59 | 75.94 | 80.91 | 35.99 | 94.22 |
| NPF 4 | 81.00 | 80.30 | 73.61 | 76.81 | 49.02 | 85.56 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shirvani, Z.; Abdi, O.; Buchroithner, M. A Synergetic Analysis of Sentinel-1 and -2 for Mapping Historical Landslides Using Object-Oriented Random Forest in the Hyrcanian Forests. Remote Sens. 2019, 11, 2300. https://doi.org/10.3390/rs11192300
Shirvani Z, Abdi O, Buchroithner M. A Synergetic Analysis of Sentinel-1 and -2 for Mapping Historical Landslides Using Object-Oriented Random Forest in the Hyrcanian Forests. Remote Sensing. 2019; 11(19):2300. https://doi.org/10.3390/rs11192300
Chicago/Turabian StyleShirvani, Zeinab, Omid Abdi, and Manfred Buchroithner. 2019. "A Synergetic Analysis of Sentinel-1 and -2 for Mapping Historical Landslides Using Object-Oriented Random Forest in the Hyrcanian Forests" Remote Sensing 11, no. 19: 2300. https://doi.org/10.3390/rs11192300