1. Introduction
In recent years, precise real-time global positioning system (GPS) orbit products have extended the capability to support real-time applications such as autonomous driving, intelligent transportation systems, and collision avoidance [
1,
2]. The real-time precision of orbits enables navigation systems to overcome problems arising from orbit errors in real-time observations [
3].
Precise real-time GPS orbits have been determined with the international global navigation satellite system (GNSS) service (IGS) forming the mainstream service. IGS provides ultra-rapid orbits as real-time precise orbits [
4]. Ultra-rapid orbits are determined using recent satellite arcs of 3 days to predict the orbit for 24 h thereafter [
5]. The maximum accuracy of the predicted orbit is 5 cm at 1D root mean square (RMS). Another such service is the IGS real-time service, which is supported by ten analysis centers [
2]. One of the analysis centers, the Centre National d’Études Spatiales (CNES), estimates the satellite orbit and clock together using undifferenced GPS observations. Other IGS analysis centers often use ultra-rapid solutions for precise orbits and concentrate on precisely estimating satellite clocks [
6,
7,
8]. Furthermore, precise point positioning (PPP)-based commercial services have similar strategies to generate precise orbits and clocks when compared with IGS real-time products. Past studies have focused on verifying the accuracy of these real-time precise orbits [
5,
8,
9].
Interest in the covariance of real-time precise GPS orbits, as well as in the accuracy, has increased in the context of user integrity, navigation performance improvement, and fault detection [
10,
11,
12,
13]. In terms of safety, covariance is one of the most important factors that provide integrity that ensures correct position information. Range error due to orbit error should be overbounded to ensure user position integrity [
14,
15]. In general, systems provide the accuracy of signal-in-space range error (SISRE) or orbit full covariance. The accuracy of SISRE is calculated with proper weightings for radial, along-track, and cross-track standard deviations [
16,
17]. Providing full covariance enables each user to propagate the accuracy of SISRE by projecting the error ellipsoid along its line of sight [
11], which can reduce specific accuracy of SISRE according to the various positions of the users [
12]. Therefore, to generate appropriate accuracy of SISRE, proper error ellipsoid which contains the true orbit should be obtained.
However, orbit full covariance is not provided from real-time orbit products. Previous studies utilized the maximum accuracy or the stochastics of orbit errors to analyze the effect of covariance usage. El-Mowafy suggested using the orbit covariance to detect faults or meaconing errors in IGS RTS correction and demonstrated the significant advantage of a new fault detection model over traditional models under a meaconing attack [
18]; the expected effect of covariance was considered using the maximum accuracy of each axis, which is greater than the full covariance. The full covariance would provide orbit uncertainty more appropriately and would improve the performance of fault detection. In addition, Cheng et al. [
19] analyzed the user range accuracy performance of real-time ephemeris. They studied the characteristics of long-term error stochastics over a year to provide the performance of user range accuracy. However, as only the average characteristics can be obtained over a long duration, the correlation for real-time covariance should be analyzed for real-time applications. Therefore, we estimated the real-time orbit covariance to identify more realistic covariance characteristics.
To support covariance-based applications, IGS plans to provide real-time full covariance, although it is not expected to be provided shortly in the near future [
20]. The real-time orbit standard deviation is presently provided over the XYZ components of the Earth-centered Earth-fixed (ECEF) frame, without any correlations between the axes. However, if the correlation information is neglected, the provided accuracy cannot ensure the performance of the orbit product, which in turn causes significant problems in fault detection and user integrity. Therefore, it is safe to provide a conservative representation of the orbit error distribution, however unnecessary overbounding decreases the availability of the system.
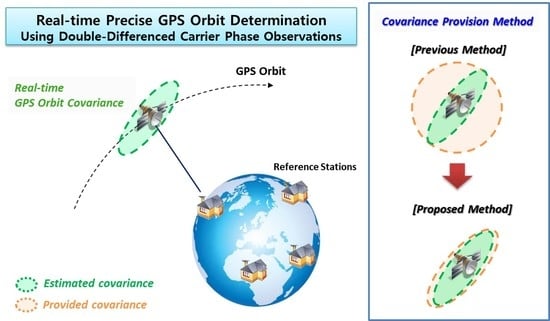
This paper proposes an effective covariance provision method considering the correlations of real-time GPS orbits. We analyzed these correlations using a real-time GPS precise orbit estimator and studied the covariance along various coordinates. The results demonstrate the real-time characteristics of the correlations, which cannot be determined based on long-term analyses. Considering the correlation, we propose a covariance provision method and evaluate it using the number of parameters and ratio of the provided covariance volume to the full covariance volume.
The remainder of this paper is organized as follows.
Section 2 presents the details of the orbit determination tool and the theoretic background of real time orbit covariance due to orbit dynamics;
Section 3 discusses the experimental results;
Section 3.1 verifies the orbit determination system in relation to the IGS final orbit;
Section 3.2 presents the experimental results of covariance analysis and proposes a new frame to minimize correlations between the axes;
Section 3.3 assesses several covariance provision methods;
Section 4 discusses our findings; and finally,
Section 5 presents our conclusions.
4. Discussion
In this study, we analyzed real-time orbit covariance and proposed a new covariance parameterization method for low-cost user systems. Current real-time orbits provide their standard deviation without considering the correlation of each axis in the ECEF frame. Therefore, we analyzed the effect of correlation to provide a novel covariance parameterization method.
We estimated the real-time GPS orbit and covariance using DDCP observations to analyze real-time correlations. The orbit and covariance were validated using IGS final orbits. The orbit converges to the 2 cm level in the radial direction and the 7.8-cm level in terms of the 3D error after 24 h. In
Figure 6 and
Figure 7, the PDF and CDF bounding plots guarantee the conservative distribution of orbit errors for each axis. The proper covariance information can be used for fault detection or user integrity.
The characteristics of the estimated covariance was analyzed over time with different frames. In
Figure 7, the covariance of 29 satellites appears in the along-track direction. The covariance ellipsoid of the RSW frame appears more uniform than that of the RAC frame. The errors and covariance in the along-track direction are greater than those in the radial and cross-track directions, mainly owing to orbit dynamics. Previous studies [
45] determined that the along-track error was larger than the others because it diverges in proportion to the square of the time step, whereas the errors along the other directions are only proportional to the time step. In addition, we estimated that the negative correlations observed between the radial and along-track directions are also mainly due to orbit dynamics. Positive radial error yields smaller gravity, which leads to negative along-track error [
9,
10]. The correlation of the cross-track and along-track errors or cross-track and radial-track errors could be neglected in the RSW frame. Although long-term characteristics [
19] demonstrate that the cross-track error in the RAC frame appears unrelated to other axis errors, we determined that real-time users must consider the error correlation of each axis when using the RAC frame.
For removing the correlation of each axis, the RSW frame is the best for providing covariance. In contrast, to utilize the RSW frame, a user is required to overcome complex computation for the transformation from ECEF to ECI and additional communication for EOP parameters. Therefore, based on our analysis of covariance characteristics, we proposed a new RAC frame using the ECEF position and velocity vectors to provide covariance similar to that of the RSW frame. The new RAC coordinate uses a new velocity vector that eliminates the velocity effect due to frame rotation. Therefore, users do not have to sustain the complex computation for the transformation from ECEF to ECI in order to utilize the advantage of the RSW frame.
Finally, we evaluated six covariance provision methods that were implemented in the ECEF frame. Each method was evaluated by means of the ratio of the ellipsoid provided to the actual covariance ellipsoid, since an ellipsoid closer to the actual covariance yields more appropriate information to improve on practical applications. Method 1 used only one scalar component per satellite, and it yielded an eight-times-larger ellipsoid than the actual covariance one. Methods 2 adopted by IGS and Method 3, which utilized the standard deviations of the X-, Y-, Z- or R-, A-, C-axes, yielded nearly three or four times the full covariance. Method 4 also provided the same number of broadcasting parameters as methods 2 and 3. With the implementation of the new RAC frame, Method 4 yielded a covariance ratio of 2.2. Furthermore, Method 5 afforded a covariance ratio of 1.3 upon application of the R-A correlation. The novel proposed method is confirmed to be effective for providing covariance to users. This approach will improve covariance applications such as fault detection, integrity, and navigation performance improvement. Furthermore, applications of covariance will exhibit more continuity owing to the reduction in uncertainty. Finally, even low-cost user systems could apply the covariance information owing to the low computational burden.
5. Conclusions
We analyzed the characteristics of real-time orbit covariance to devise a new covariance parameterization method. For the covariance analysis, we implemented a real-time orbit determination tool. The filter in our approach utilized DDCP measurements to determine the satellite orbits and their covariance. The orbit accuracy was to the 2 cm level along the radial direction and to the 7.8-cm level in terms of 3D error relative to the IGS final orbits. In addition, we identified that the covariance conservatively reflects the error distribution.
The covariance of real-time GPS orbits exhibits a special feature in the ECI coordinate system. The error correlation between the radial and along-track errors remains negative, and the cross-track errors are uncorrelated with the other two parameters. However, the cross-track characteristics of the ECEF are variable, and they do not appear in the ECI frame or in any long-term analysis of previous study results. Therefore, we proposed a new ECEF-based local the coordinate to maintain real-time characteristics in ECI.
The new RAC frame obtained through covariance analyses is deemed suitable to provide more realistic covariance than previous approaches. The method of neglecting the correlation of each axis in ECEF yields an ellipsoid with approximately 4 times the volume of full covariance. However, the new RAC frame reduced the size of the provided ellipsoid by 2.2 times the full covariance volume. In addition, it was possible to generate an ellipsoid similar to the full covariance considering the R-A correlation. In conclusion, the proposed method provides covariance similar to the actual value with a reduced number of parameters considering the real-time covariance characteristics. We expect that the real-time covariance of the filter can be applied to navigation improvement, user integrity, and fault detection for PPP or RTK.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}