1. Introduction
High-frequency surface wave radar (HFSWR) usually consists of a one-dimensional line array with weak control of the vertical pattern. Therefore, energy cannot be strictly radiated along the sea surface and partially radiates upwards and impinges on the ionosphere. In some cases, the incident skywave energy may be reflected or scattered by the target or ionosphere and return to the receiver [
1]. In fact, HF radar signals propagate through the ionosphere in three ways: the first is near-vertical reflection; the second is to emit a wave at an angle less than vertical, reflected by the ocean or the target, and then back along the same path or sea surface; the third is back-scattering phenomenon caused by the irregularities and the fluctuations of the ionosphere [
2]. Traditionally, in HFSWR, ionospheric echo is generally considered as clutter, and there have been many studies on ionospheric clutter suppression [
2,
3]. However, in the second scenario, ionospheric echo may carry the information of the target (such as a plane, island, or vessel).
It is worth noting that the presence of the ionospheric echo of the target can extend the detection range of the HFSWR, which has not been considered or analyzed in the previous HFSWR systems. This paper proposes a novel tracker to solve the problem of false tracks in long-range detection of HFSWR, making it possible to expand the surveillance area of HFSWR. This is very favorable for marine environmental monitoring, and it can be directly applied to existing HFSWR systems without adding additional equipment.
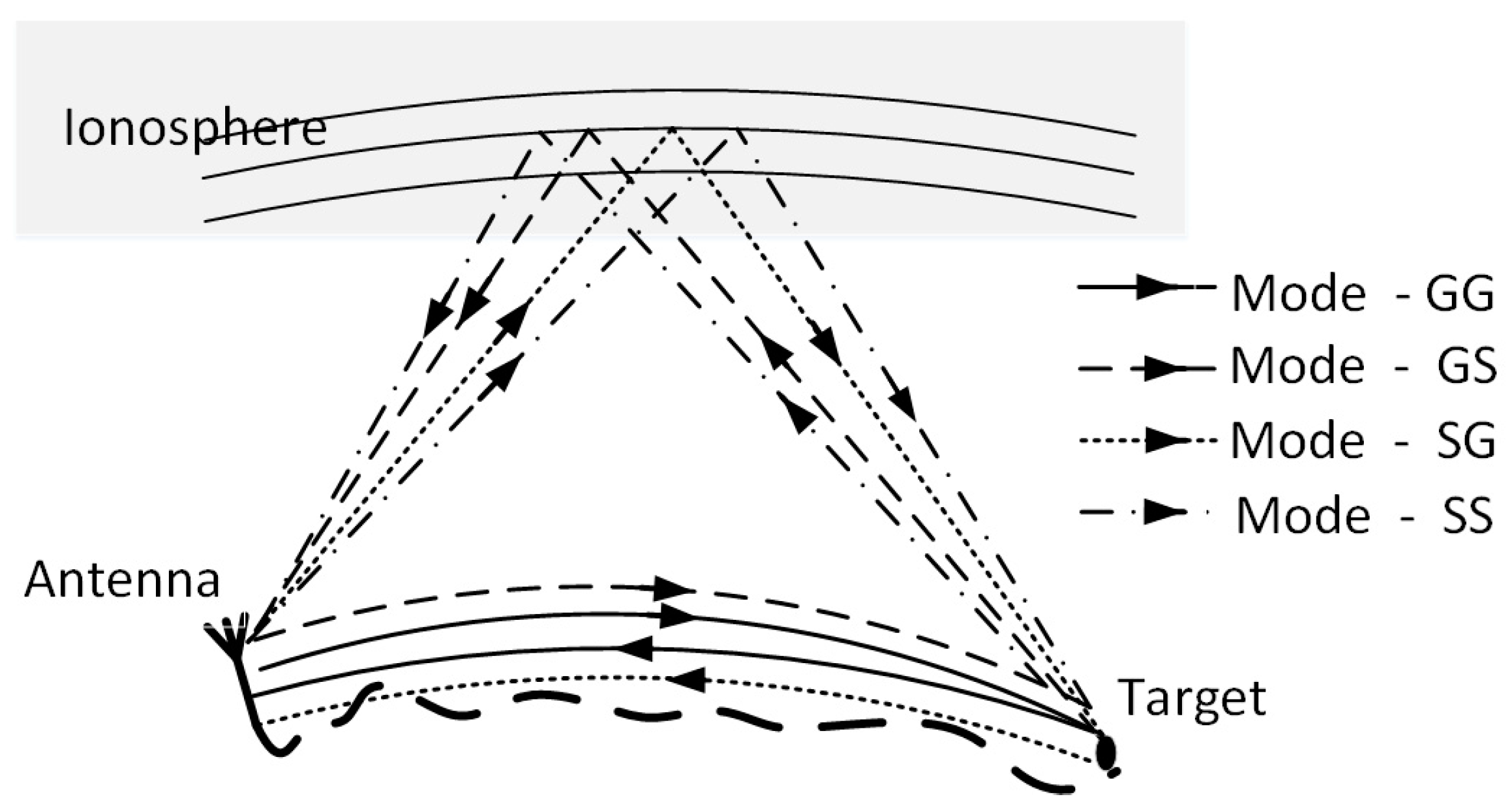
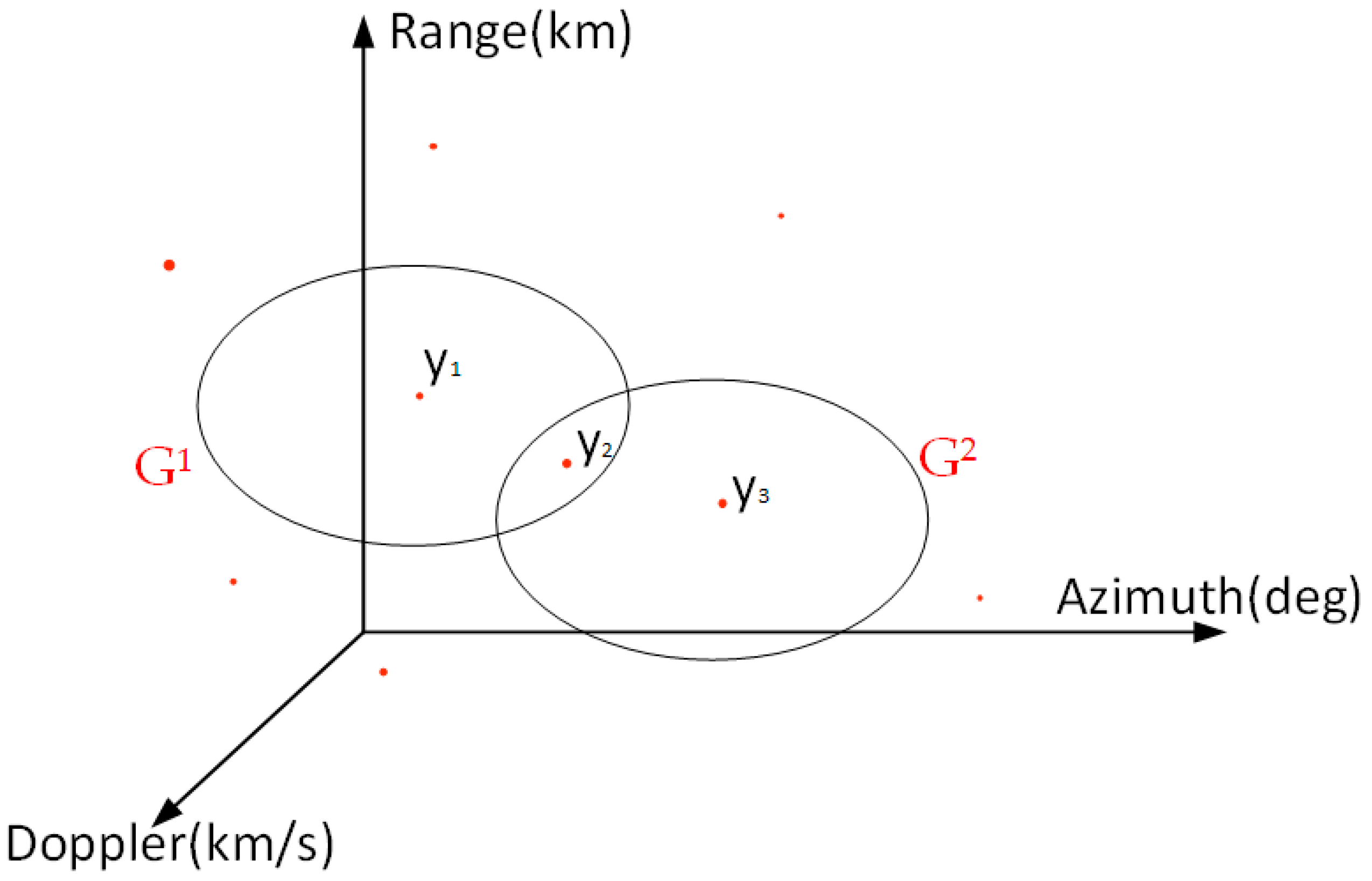
However, the existence of ionospheric echo results in several echoes corresponding to one target (the phenomenon of multiple propagation modes) in HFSWR. Irrespective of ionospheric stratification, there are four propagation modes, as shown in
Figure 1: emit and receive the wave through the ground wave path—GG, emit/receive the wave through the ground wave path and receive/emit the wave from the ionosphere—GS/SG, emit the wave to the ionosphere and receive the wave from the ionosphere—SS [
4].
The phenomenon of multiple propagation modes results in the following problems:
- (a)
One target may have several measurements and one measurement may correspond to many targets, which may cause false detections;
- (b)
The actual ground range calculation formula for each propagation modes are different, therefore, misjudgment of the measurement’s propagation mode will lead to a false estimation of the target’s true position; and
- (c)
One target may form multiple tracks.
Note that, multipath phenomenon caused by ionospheric stratification also exists. In addition, multiple propagation modes’ phenomenon also brings some advantages. The skywave propagation mode propagates farther than the groundwave propagation mode because its attenuation is smaller and decays slower than the ground attenuation. Hence, if we analyze the echoes of multiple propagation modes together, the detection range of HFSWR can be expanded. However, we need to solve those problems caused by multiple propagation modes’ phenomenon at first. In addition, since the skywave propagation mode echo may exceed the unambiguity range of the existing HFSWR, this paper extends the unambiguity detection range of HFSWR through a range ambiguity resolution method to observe the echoes of all propagation modes more effectively.
The key of the above problems lies in how to judge the propagation mode of the measurements. The direct method is to obtain the echo’s elevation angle which, however, is difficult for HFSWR, due to one-dimensional line array is deployed there. Some researches on two-dimensional arrays has been proposed, for example, Ref. [
5] uses L-shaped arrays to suppress ionospheric interference and Ref. [
6] uses 4 × 4 square planar arrays to mitigate ionospheric clutter. However, it is still difficult to solve the multi-mode problems in the target detection phase, because mode SG (GS) cannot be distinguished with mode GG (SS) through the elevation angle. Therefore, in this paper, we consider to solve the multi-mode problems when tracking targets for a one-dimensional array HFSWR system.
Target tracking in HFSWR has been extensively studied, and it mainly consists of various filters to describe the target movement properly, such as the Kalman filter [
7], deferred decision filter [
8], extended Kalman filter [
9], and unscented Kalman filter [
10], etc. To enhance the tracking performance in clutter background, many data association algorithms are employed to HFSWR, such as near neighbor data association [
11], probabilistic data association (PDA) [
12] and joint probabilistic data association (JPDA) [
13]. There are also some knowledge-based tracking algorithms for reducing the probability of the track breaking [
14]. However, all those tracking method cannot solve the multi-mode problem and will result in false tracks.
Multipath phenomenon of over the horizon radar (OTHR) caused by ionosphere stratification also forms false tracks, and there are two common types of methods for tracking. The first type is to establish a target dynamical model based on the radar coordinate system, and applying a data association tracking algorithm to achieve tracking under the radar coordinate system. After tracking, one target may form multiple tracks. Then, the track fusion algorithm is applied to find which tracks correspond to the same target and calculate the real target track. The data association tracking algorithm includes Viterbi data association (VDA) [
15], probabilistic data association (PDA) [
16] and probabilistic multi-hypothesis tracking (PMHT) [
17], etc. The track fusion algorithm includes a dynamic weighted fusion algorithm [
18], a sequential track-to-track fusion algorithm [
19], etc. The second type establishes the target dynamical model under the geographic coordinate system and completes the data association in the radar coordinate system. This type of method can obtain the real target track directly (only one track for one target). The corresponding data association algorithm includes multipath data association (MPDA) [
20], multipath Viterbi data association (MVDA) [
21], Markov chain Monte Carlo (MCMC) [
22], and expectation maximization data association (EMDA) [
23], etc. The tracking accuracy of MCMC and EMDA is high, but their computation is heavy. MPDA uses Markov chain to characterize the probability transfer of target state; MVDA uses the dynamic programming optimization framework to merge or delete data association hypotheses, which is sub-optimal. Those algorithms have both advantages and disadvantages.
The essential difference between the two types of methods is that the target dynamic model is based on different coordinate systems. The first type is based on the radar coordinate system, while the second type is under the geographic coordinate system. In addition, the first type of method does not need the prior knowledge of the ionosphere, and can work stably without relying on coordinate transformation. However, it will form many tracks correspond to one target, which needs track fusion to obtain the real target track. Therefore, this type of method has a higher track loss rate when the echoes of some modes are not detected, while the second type of method requires coordinate transformation and ionosphere status information, which will introduce errors and degrade tracking stability, but the track loss rate is lower. Certain modes’ echoes may not happen because of the path attenuation and the instability of the ionosphere, which will be analyzed in
Section 2. Therefore, we choose the second type of method. Since this paper is the first attempt to propose the multi-mode target tracking for HFSWR, we chose to modify the MPDA tracker that has been widely used.
In
Section 2, we analyze the multiple propagation modes’ phenomenon in HFSWR, and study the coverage of each propagation mode by analyzing path attenuation. Then, we show the processing results of the actual data collected in Weihai, China to illustrate the existence of multiple propagation modes’ phenomenon (false tracks). In
Section 3, we construct a modified multi-mode probability data association tracker. MPDA establishes a target dynamical model and measurement model in the geographic coordinate and the radar coordinate, respectively. Thus, firstly, we show the target dynamical model and measurement model. The target dynamical model uses a linear discrete-time model described by range, velocity, azimuth, and azimuth rate. The measurement model is constructed through the geometrical relationship between target ground range and each propagation mode’s path length and it consists of path length, azimuth, and velocity. Obviously, the measurement model is nonlinear, so the Jacobian of the coordinate transformation is also needed. Moreover, a one-point initiation algorithm proposed in [
20] is modified to apply to HFSWR. In
Section 4, the simulation results show that the modified multi-mode probability data association tracker can suppress false tracks and track the real target correctly. Moreover, the multi-mode target tracker is successfully applied to the actual data and it found a trajectory, which should be a plane flying to Hohhot, China.
2. Multiple Propagation Modes’ Phenomenon Analysis
Considering that both the groundwave path and the skywave path exist in HFSWR, there should be four propagation modes irrespective of ionospheric stratification, labeled as GG, GS, SG, and SS, as shown in
Figure 1. However, the plasma distribution of the ionosphere varies with height, time, solar activity, latitude and longitude, etc. According to the plasma distribution, the ionosphere is usually divided into three layers, the E-layer, the Es-layer, and the F-layer, which may be separated into the F1-layer and F2-layer [
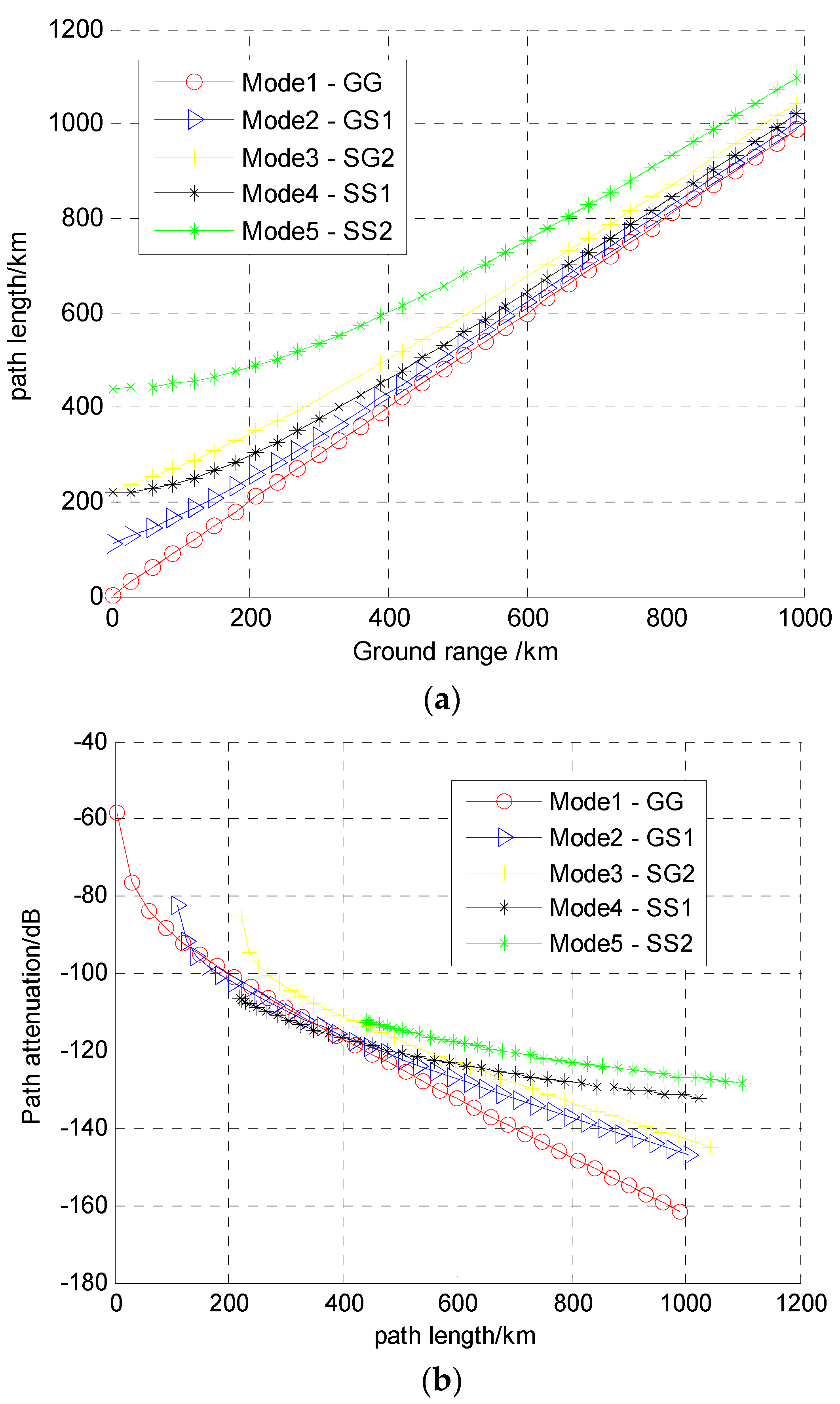
24]. The layer from which the wave is reflected is uncertain and is related to the frequency, angle of incidence, and site, etc. Therefore, considering the complexities of the ionosphere, there will be quite a large number of propagation modes. In order to reduce the complexity of the tracking algorithm when taking the ionospheric characteristics into account, we only analyze these five propagation modes in this paper—Mode 1-GG, Mode 2-GS1 (ionospheric height is
), Mode 3-SG2 (ionospheric height is
), Mode 4-SS1 (ionospheric height is
), and Mode 5-SS2 (ionospheric height is
).
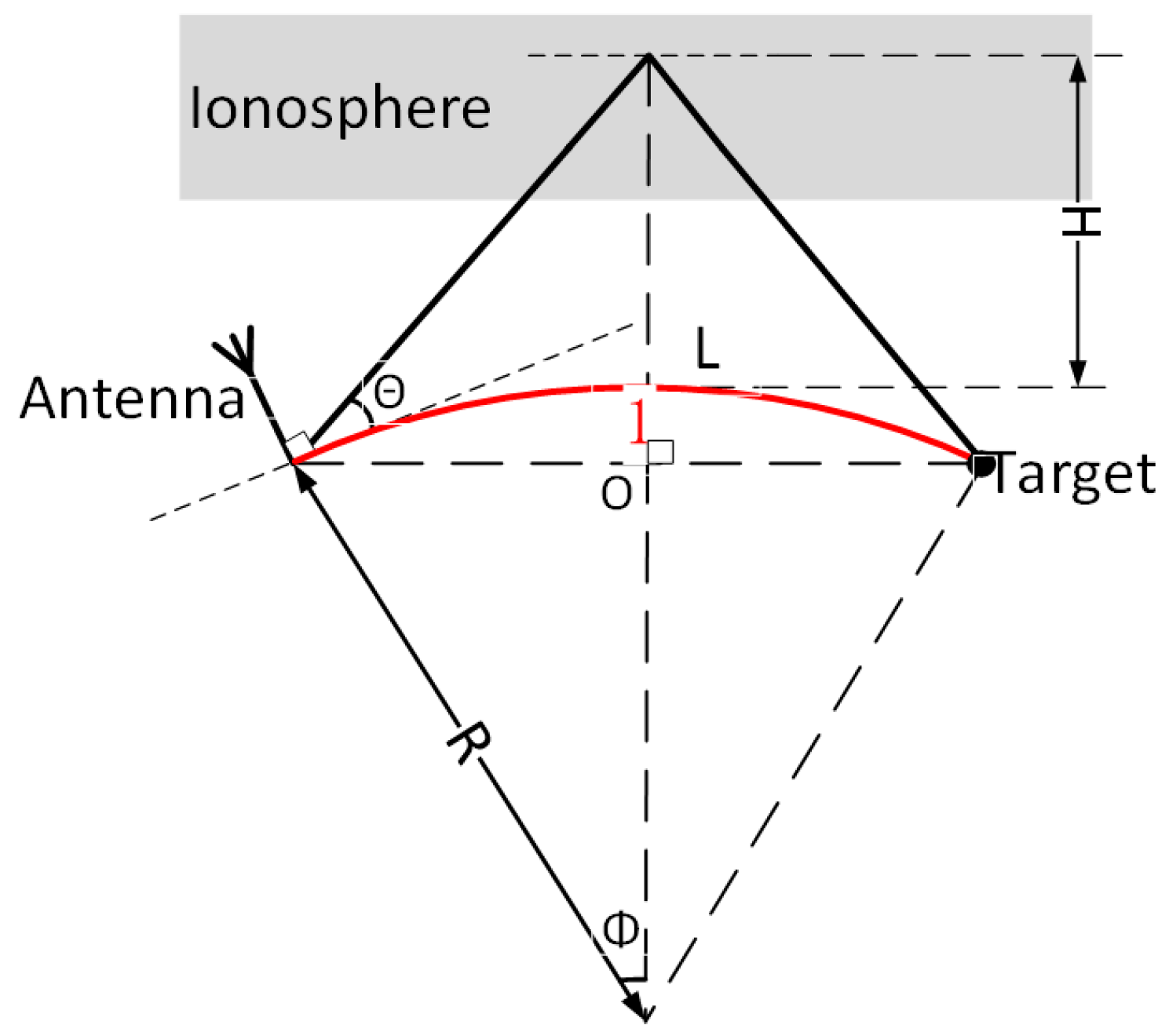
Then, we calculate the attenuation of each mode through their corresponding groundwave attenuation and skywave attenuation. Here, groundwave attenuation is calculated by the groundwave-propagation program GRWAVE developed by Rotheram [
25], and skywave attenuation is calculated according to the empirical formula proposed by CCIR (Consultative Committee of International Radio) [
26]. Moreover, the path length of each mode is calculated through the geometric relationship, as shown in
Figure 2 and its calculation formula is the same as the measurement model that will be given in
Section 3.
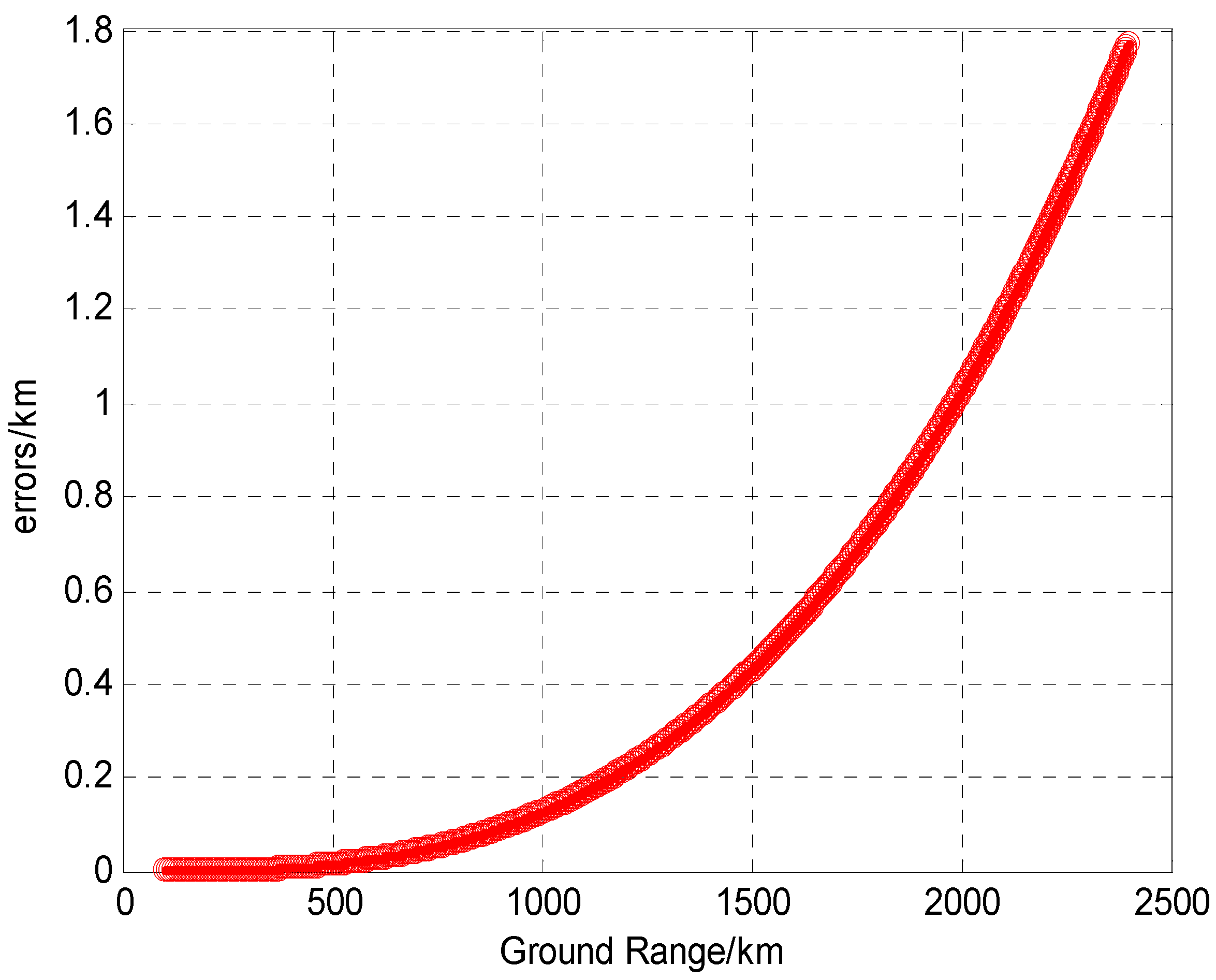
Figure 3a shows that the path length (the length calculated through the echo’s delay time) of each of five propagation modes is a function of ground range (target’s ground range). Here, the ionospheric heights are
and
, and the electromagnetic frequency is 5 MHz.
Figure 3b shows the path attenuation (the electric field level) in five propagation modes changing with the path length. It can be seen that there is one propagation mode within 200 km, four modes in the range of 200 km to 400 km, and five modes over 400 km. In addition, as the distance increases, the path attenuation is so large that the target cannot be detected. In this case, the number of propagation modes may be less than the theoretical value. The multipath range is also related to electromagnetic frequency and the ionospheric state, which will not be analyzed in detail in this paper.
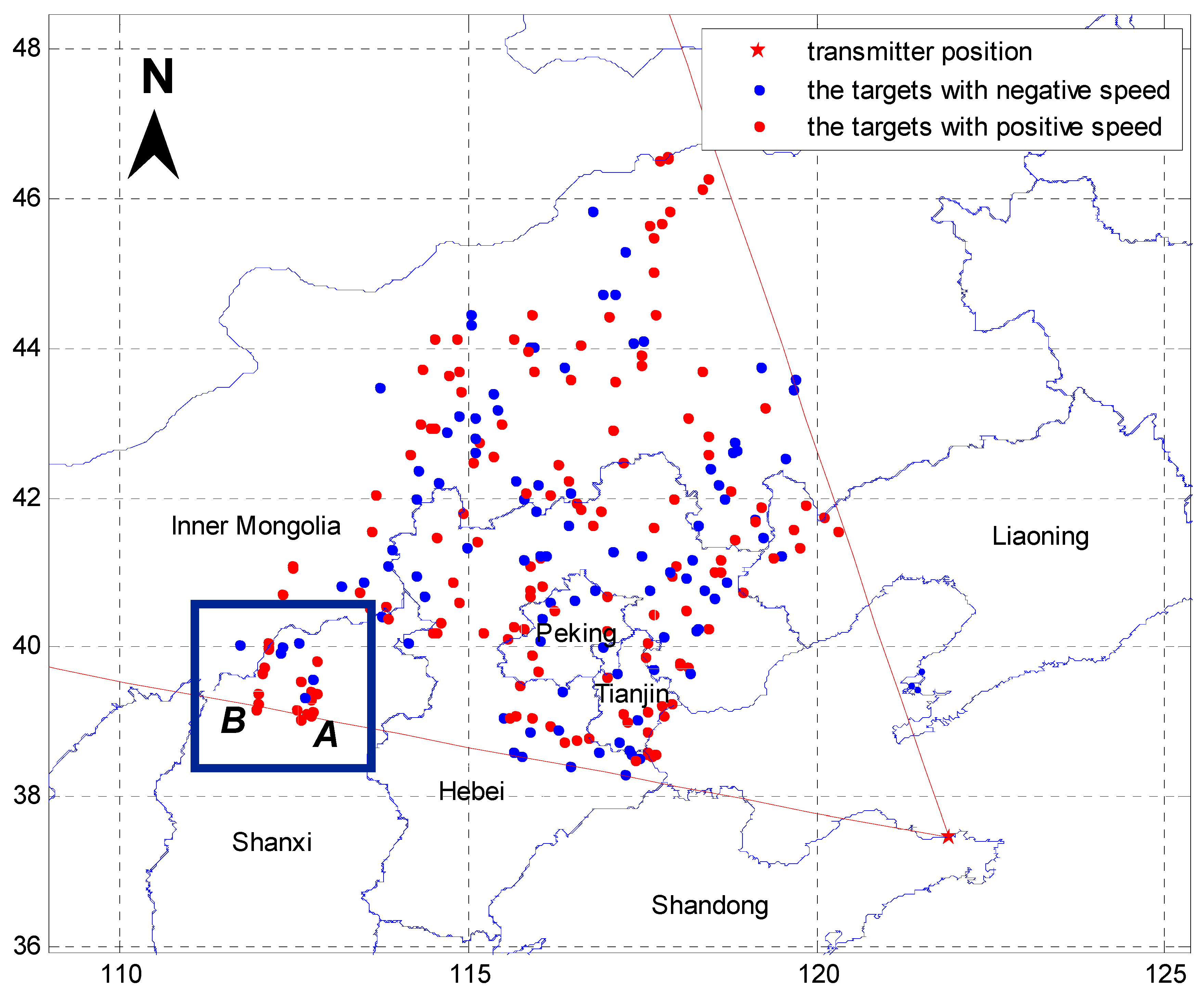
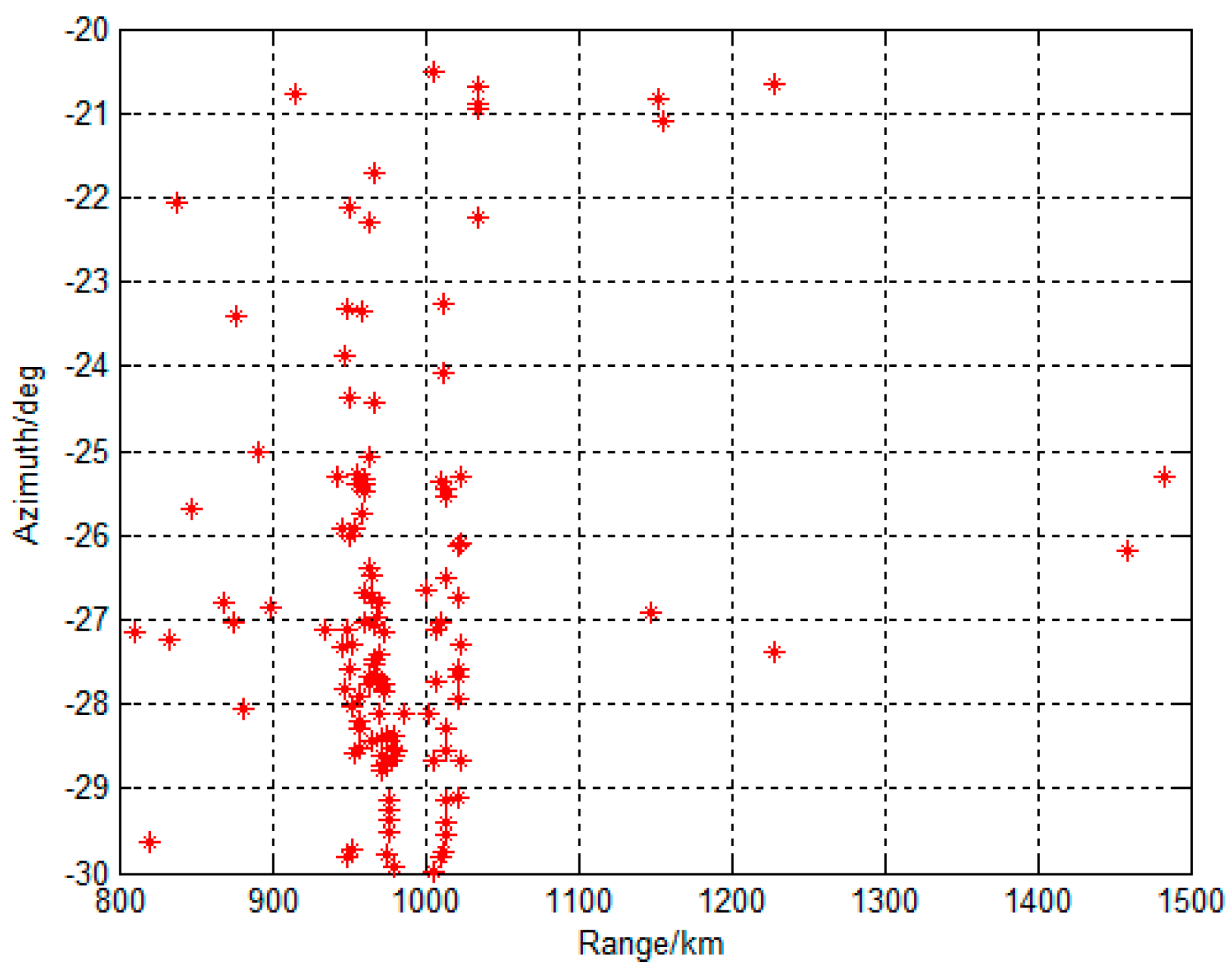
Next, the actual data collected in Weihai, China is processed to illustrate the existence of the phenomenon of multiple propagation modes’. The processing result is shown in
Figure 4, where red dots represent the detection targets with positive speed (the target is approaching the radar), and blue dots represent the detection targets with negative speed (the target is moving away from the radar). As the illuminated area is inland, a large amount of clutter affects the detection performance. Within 900–1100 km, we determine two suspected tracks, represented by green (track A) and yellow (track B) squares, respectively. The measured values of the two suspected tracks are shown in
Table 1 and
Table 2.
Firstly, we calculate the ground distance of every measurement of the two tracks with two different ionospheric height. We assume the ionospheric heights for tracks A and B are 140 km and 200 km, respectively, then we calculate the ground distance, as shown in the third column of
Table 1 and
Table 2. Then, we calculate the absolute value of the difference between the two tracks’ parameters at each moment, as shown in
Table 3. Using the accuracy of the measurements as a criterion. The accuracy of the distance measurements is 1 km, the accuracy of velocity is 0.6 m/s, and the accuracy of azimuth is five degrees. Since the ionospheric height is not accurate, the accuracy of the distance will increase, set to 5 km. We find that the differences between the two tracks’ ground distance, velocity, and azimuth are smaller than 5 km, 0.6 m/s, and five degrees, respectively, and, according to our criteria, the two tracks are corresponding to the same target. Therefore, there are multiple tracks (false tracks) for one target, i.e., the phenomenon of multiple propagation modes in HFSWR.
After the above analysis, we know that the two tracks should come from one target. The echoes of modes GG/SG1/GS2 of this target have not been detected because path attenuation of the target at about 900 km in these three modes is very high. However, this is also a case of the phenomenon of multiple propagation modes in HSFWR.
4. Numerical Simulation and Actual Data Processing
In this section, we give the simulation results of the modified multi-mode PDA tracker and then apply the tracker to process the actual data collected in Weihai, China.
Table 5 lists the simulation parameters of target state model and measurement model.
For the validation gate, the gate probability at the k-th scan is set to 0.95, same for each propagation mode. According to the hypothesis testing of , the scalar constant should be 7.8. The clutter density is assigned 0.002.
Then, we assume that the probability of target detection
is the same for all propagation mode. Markov transition matrix
M is:
When the probability of target detection
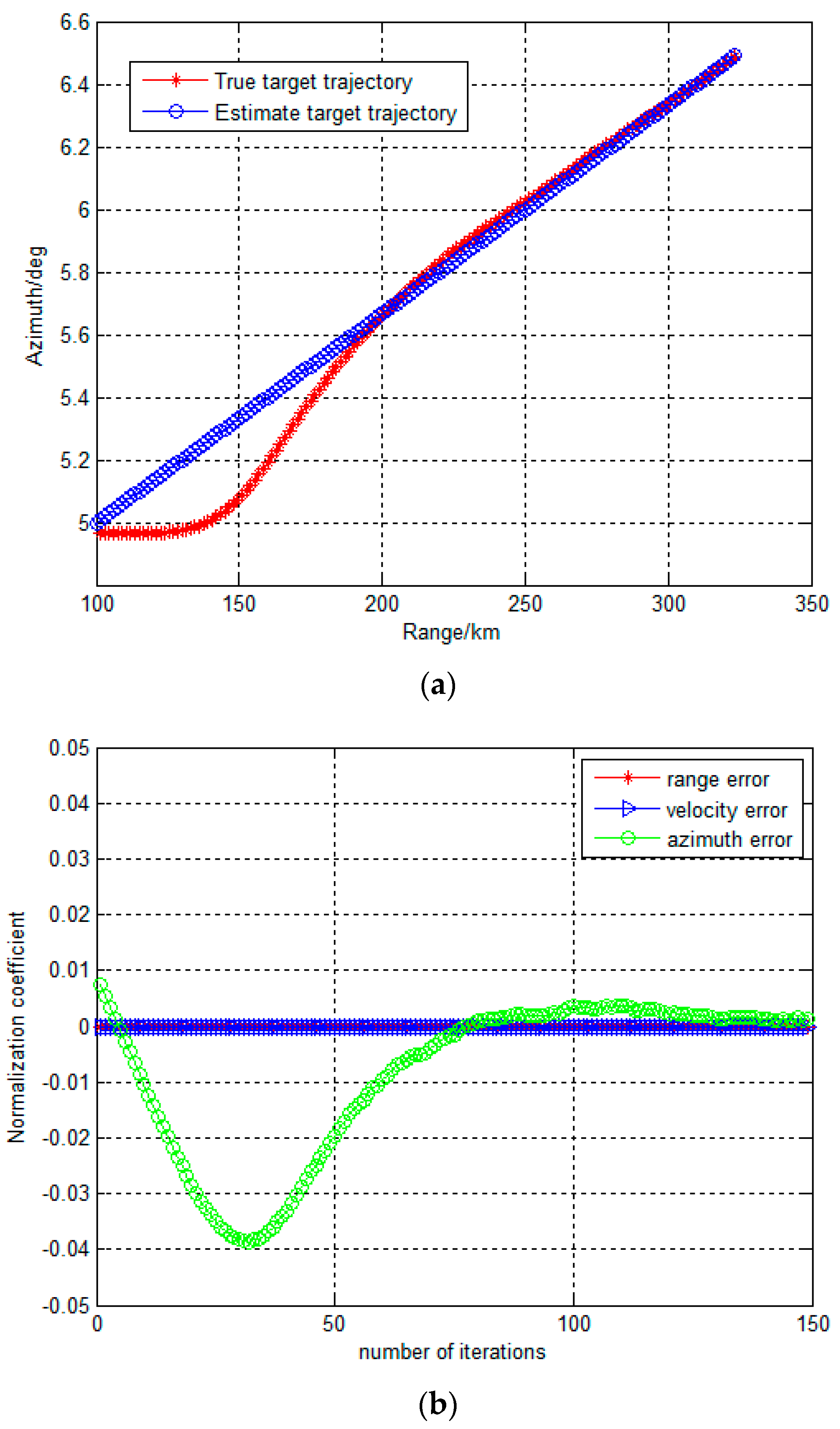
is equal to 0.4, the tracking result is shown in
Figure 7a and the tracking error is given in
Figure 7b. The false tracks are suppressed and the target state is estimated correctly.
The actual data collected in Weihai, China has been analyzed in
Section 2. Since the detection number is enormous and the suspected target tracks’ locations are known, we just apply the modified multi-mode PDA tracker to the measurements around the suspected two tracks as shown in
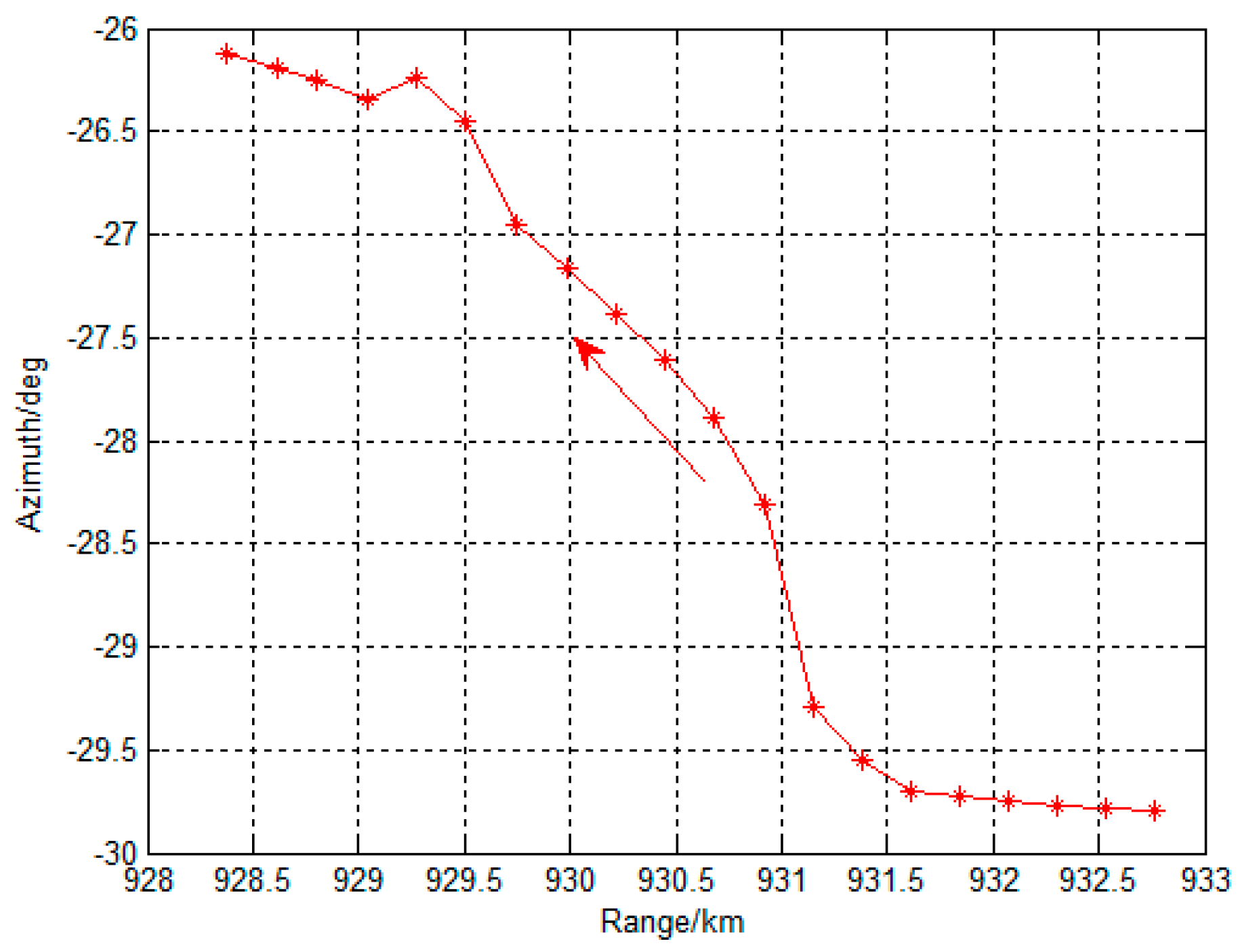
Figure 8. According to the previous analysis, the two suspected tracks belong to the same target, that is, the multiple propagation modes’ phenomenon. If we use the traditional tracking method, two tracks appear. The tracking result of the proposed tracker is shown in
Figure 9 and the arrows indicate the direction of target movement. We can determine that the tracking results are basically consistent with the analysis in
Section 2. The tracking result has only one track without false tracks. Therefore, the processing result proves that the modified multi-mode PDA tracker is significant for HFSWR to suppress false tracks caused by the phenomenon of multiple propagation modes.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}