
Evaluation of Spatiotemporal Characteristics of Lane-Changing at the Freeway Weaving Area from Trajectory Data

Abstract
:1. Introduction
2. Studied Area and Raw Data
3. Methodology
3.1. LC Extraction
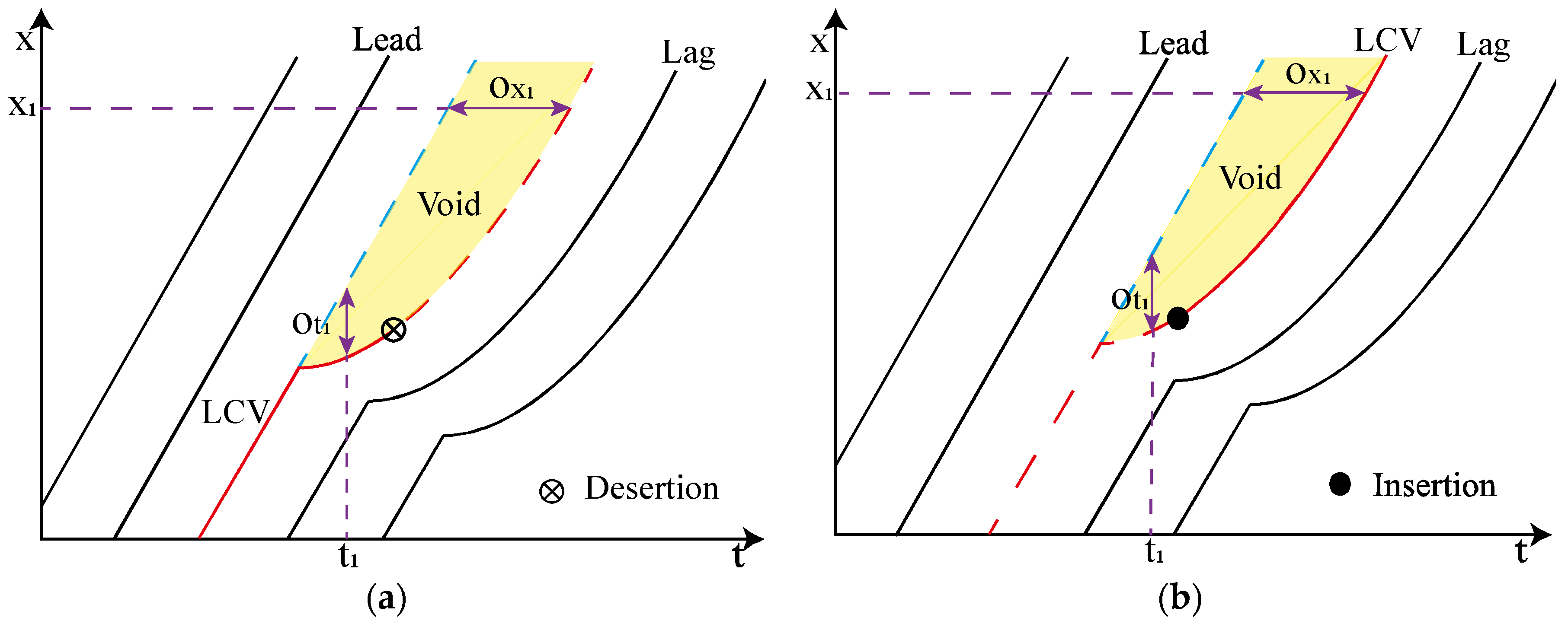
3.2. Void Occupancy Calculation
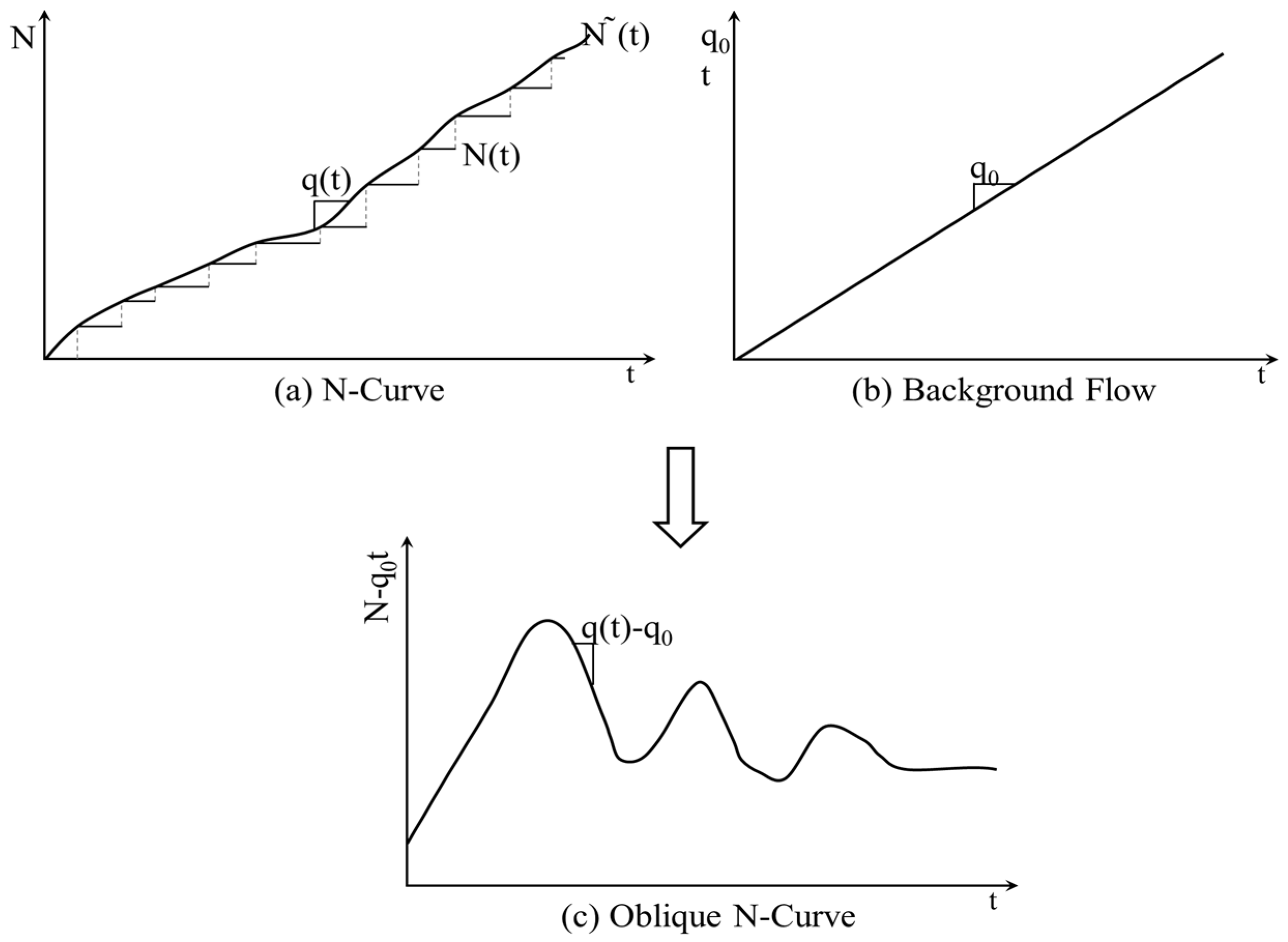
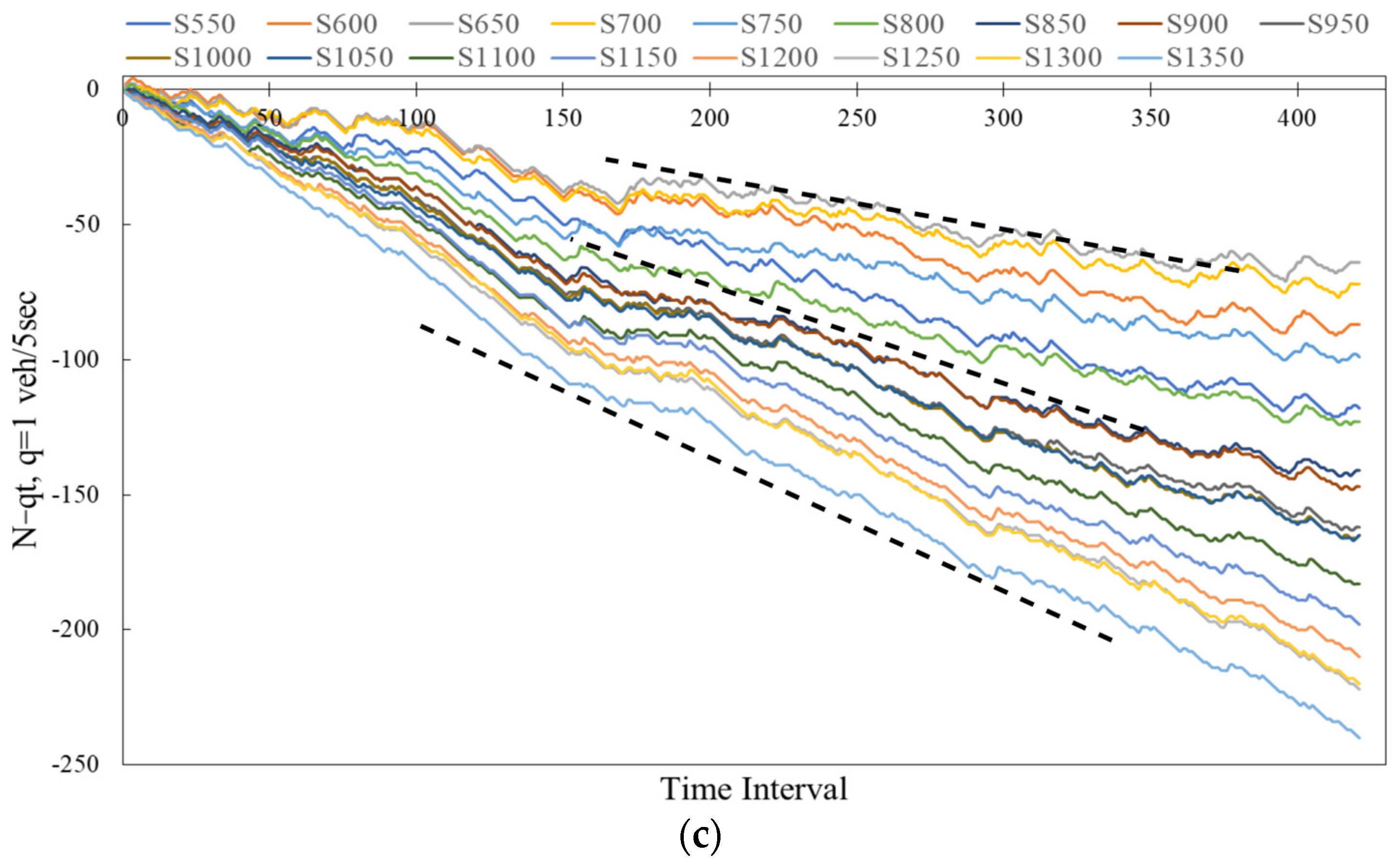
3.3. Throughput Variation Determination
3.4. Spatial and Temporal Distribution Plotting
4. Results and Discussion
4.1. Descriptive Statistics
4.2. Spatial Analysis of LC Events
4.3. Spatial Analysis of Time Void Occupancy
4.4. Temporal Analysis
4.5. Discussion and Suggestions for Practice
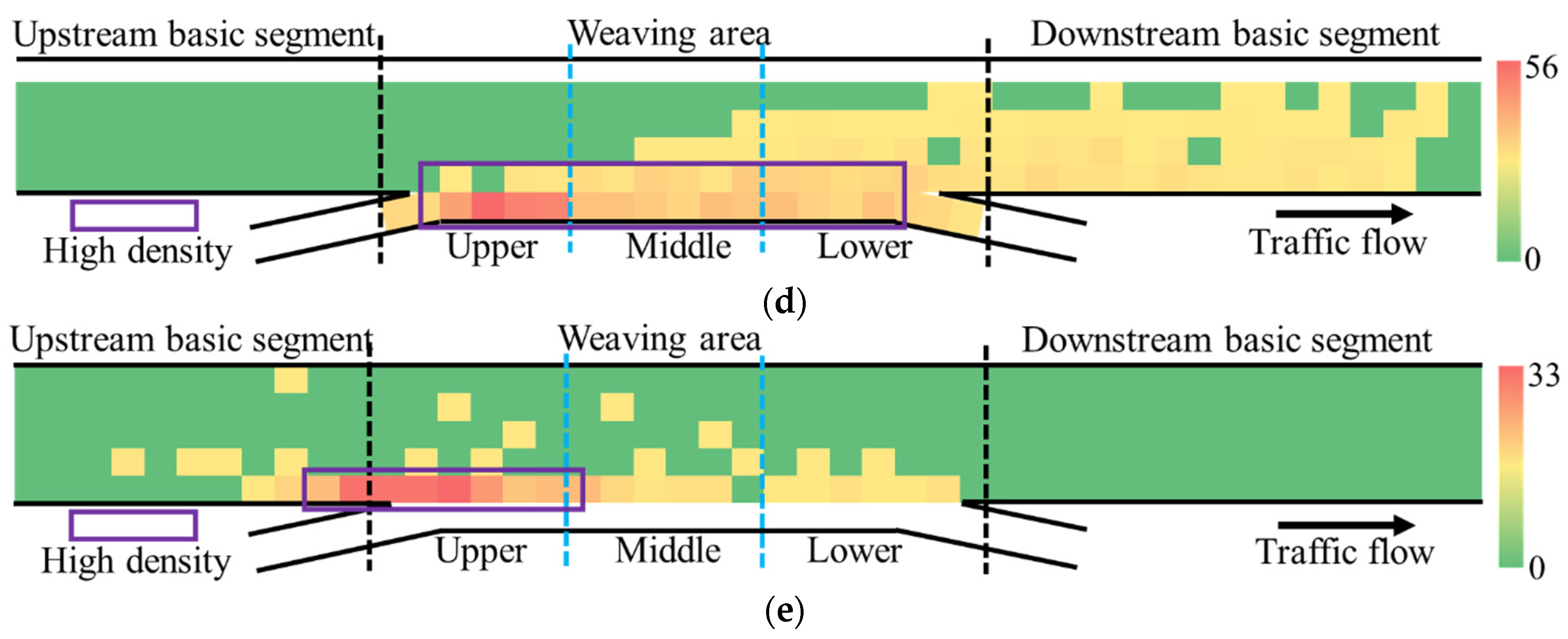
- The majority of merging and diverging vehicles tend to change lanes near the merge triangle area at the entrance of the weaving segment (Figure 8d,e). Specifically, lane changes made by diverging vehicles are more concentrated around the merge triangle area and most of them are distributed in the upper part of the weaving segment, with a few extending downstream on the outermost mainline lane. Conversely, lane changes of merging vehicles exhibit a distribution with the merge triangle as the highest point, gradually decreasing towards downstream and inner lanes, forming a fan-shaped distribution. Such a behavioral pattern for lane changes arises from the inclination of weaving vehicles to expeditiously effectuate lane changes toward their target direction upon ingress into the weaving segment. This strategic maneuver facilitates weaving vehicles to complete weaving operations smoothly and allows them to assimilate into more optimal lanes within the confined space of the weaving segment.
- 2.
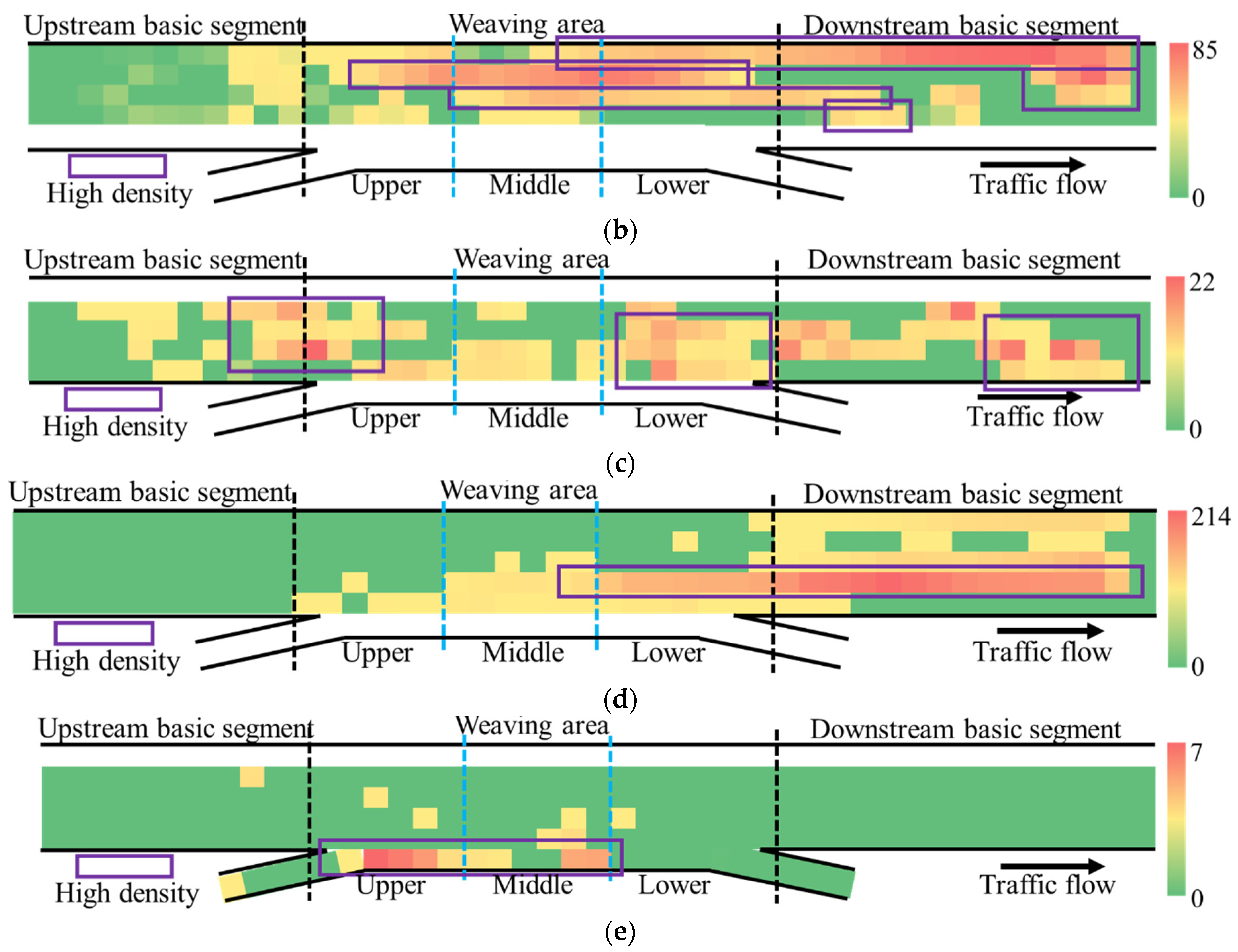
- Most lane changes of through vehicles congregate in the midsection of the weaving segment and the downstream basic segment (Figure 8b,c). This predilection is an outcome of the influence exerted by weaving traffic on the lane change patterns of through traffic. Within the weaving segment, through vehicles change lanes to make space for weaving operations. After passing through the weaving segment, many through vehicles also make lane changes to search for a better driving condition.
- 3.
- It can be seen from the above analysis that lane changes only generate sporadic and dispersed temporal voids in traffic flow on the original lane (Figure 9). These temporal voids are inconsequential in magnitude when compared with those engendered on the target lane.
- 4.
- The time void in traffic flow on the target lane is primarily caused by through inside LC events and merging vehicle LC events (Figure 10a,d,e). This is because the quantity of these two types of lane change is approximately three times that of the other two types of LC events. While the number of merging vehicles is slightly more than diverging vehicles, the main difference in the number of lane changes is due to almost half of the merging vehicles making two or more lane changes, whereas around 95% of diverging vehicles make only one lane change. This indicates that diverging vehicles are well prepared for weaving operations when they are upstream of the weaving segment. Meanwhile, merging vehicles, after completing the weaving operation, are eager to change lanes towards the inner side within the weaving area to obtain a better driving environment.
- 5.
- Analysis from Section 4.4 reveals that a large number of lane changes in a short period can lead to traffic breakdown (Figure 12 and Figure 13). Therefore, it is necessary to disperse lane changes both in terms of time and space to allow traffic flow to pass through the weaving segment more safely and smoothly. In addition to the previously mentioned methods of setting up signs and lane markings, implementing navigation system reminders can guide drivers to choose appropriate times for lane changes.
5. Conclusions
- (i)
- The discretionary LC events from through vehicles take about 50% of the total LC events, which are much more numerous than the mandatory LC events in the weaving area. Both merging and diverging vehicles change lanes upon reaching the weaving area, i.e., the vicinities connecting the entrance of the on-ramp and the freeway mainline. After passing through the weaving section, both through and merging vehicles would like to change lanes again to improve their driving environment.
- (ii)
- The number of time void occupancies in the original lanes are less than 1/10 of those in the target lanes. Furthermore, the distribution of time void occupancies in the original lanes is scattered and irregular, while that in the target lanes is similar to the distributions of LC events.
- (iii)
- The diverging vehicle LC events produce fewer spatial and time void occupancies than the merging vehicle LC events. Through vehicle inside LC events generate more space void occupancies but fewer time void occupancies than merging vehicle LC events.
- (iv)
- From the temporal distributions, the occurrences of throughput reductions and high space void occupancies lag behind the occurrence of peak LC events, which illustrates that there is a causality between LC events and the occurrences of the space void occupancies and throughput reductions. From the spatial distributions, the locations of large time void occupancies are downstream of the locations of peak LC events.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Levinson, D. Ramp metering and freeway bottleneck capacity. Transp. Res. Part A Policy Pract. 2010, 44, 218–235. [Google Scholar] [CrossRef]
- Coifman, B.; Kim, S. Extended bottlenecks, the fundamental relationship, and capacity drop on freeways. Transp. Res. Part A Policy Pract. 2011, 45, 980–991. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S. Capacity-drop at extended bottlenecks: Merge, diverge, and weave. Transp. Res. Part B Methodol. 2018, 108, 1–20. [Google Scholar] [CrossRef]
- Transportation Research Board. Highway Capacity Manual; Transportation Research Board: Washington, DC, USA, 2016. [Google Scholar]
- Zheng, Z. Recent developments and research need in modeling lane changing. Transp. Res. Part B Methodol. 2014, 60, 16–32. [Google Scholar] [CrossRef]
- Srivastava, A.; Jin, W. A lane changing cell transmission model for modeling capacity drop at lane drop bottlenecks (No. 16-5452). In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Yan, Z.; Yang, K.; Wang, Z.; Yang, B.; Kaizuka, T.; Nakano, K. Intention-based lane changing and lane keeping haptic guidance steering system. IEEE Trans. Intell. Veh. 2020, 6, 622–633. [Google Scholar] [CrossRef]
- Xia, Y.; Qu, Z.; Sun, Z.; Li, Z. A human-like model to understand surrounding vehicles’ lane changing intentions for autonomous driving. IEEE Trans. Veh. Technol. 2021, 70, 4178–4189. [Google Scholar] [CrossRef]
- Alizadeh, A.; Moghadam, M.; Bicer, Y.; Ure, N.K.; Yavas, U.; Kurtulus, C. Automated lane change decision making using deep reinforcement learning in dynamic and uncertain highway environment. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1399–1404. [Google Scholar]
- Li, G.; Yang, Y.; Li, S.; Qu, X.; Lyu, N.; Li, S.E. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness. Transp. Res. Part C Emerg. Technol. 2022, 134, 103452. [Google Scholar] [CrossRef]
- Zheng, Y.; Ran, B.; Qu, X.; Zhang, J.; Lin, Y. Cooperative lane changing strategies to improve traffic operation and safety nearby freeway off-ramps in a connected and automated vehicles environment. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4605–4614. [Google Scholar] [CrossRef]
- Ali, Y.; Zheng, Z.; Haque, M.M.; Yildirimoglu, M.; Washington, S. Detecting, analysing, and modelling failed lane-changing attempts in traditional and connected environments. Anal. Methods Accid. Res. 2020, 28, 100138. [Google Scholar] [CrossRef]
- Yu, K.; Lin, L.; Alazab, M.; Tan, L.; Gu, B. Deep learning-based traffic safety solution for a mixture of autonomous and manual vehicles in a 5G-enabled intelligent transportation system. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4337–4347. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Roetting, M. Estimating driver’s lane-change intent considering driving style and contextual traffic. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3258–3271. [Google Scholar] [CrossRef]
- Guo, H.; Keyvan-Ekbatani, M.; Xie, K. Lane change detection and prediction using real-world connected vehicle data. Transp. Res. Part C Emerg. Technol. 2022, 142, 103785. [Google Scholar] [CrossRef]
- Laval, J.A.; Leclercq, L. Microscopic modeling of the relaxation phenomenon using a macroscopic lane-changing model. Transp. Res. Part B Methodol. 2008, 42, 511–522. [Google Scholar] [CrossRef]
- Zheng, Z.; Ahn, S.; Chen, D.; Laval, J. The effects of lane-changing on the immediate follower: Anticipation, relaxation, and change in driver characteristics. Transp. Res. Part C Emerg. Technol. 2013, 26, 367–379. [Google Scholar] [CrossRef]
- He, X.; Yang, H.; Hu, Z.; Lv, C. Robust lane change decision making for autonomous vehicles: An observation adversarial reinforcement learning approach. IEEE Trans. Intell. Veh. 2022, 8, 184–193. [Google Scholar] [CrossRef]
- Ali, Y.; Haque, M.M.; Zheng, Z.; Washington, S.; Yildirimoglu, M. A hazard-based duration model to quantify the impact of connected driving environment on safety during mandatory lane-changing. Transp. Res. Part C Emerg. Technol. 2019, 106, 113–131. [Google Scholar] [CrossRef]
- Wang, C.; Sun, Q.; Guo, Y.; Fu, R.; Yuan, W. Improving the User Acceptability of Advanced Driver Assistance Systems Based on Different Driving Styles: A Case Study of Lane Change Warning Systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4196–4208. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, H. An improved learning-based LSTM approach for lane change intention prediction subject to imbalanced data. Transp. Res. Part C Emerg. Technol. 2021, 133, 103414. [Google Scholar] [CrossRef]
- Shawky, M. Factors affecting lane change crashes. IATSS Res. 2020, 44, 155–161. [Google Scholar] [CrossRef]
- Adanu, E.K.; Lidbe, A.; Tedla, E.; Jones, S. Factors associated with driver injury severity of lane changing crashes involving younger and older drivers. Accid. Anal. Prev. 2021, 149, 105867. [Google Scholar] [CrossRef]
- Patire, A.D.; Cassidy, M.J. Lane changing patterns of bane and benefit: Observations of an uphill expressway. Transp. Res. Part B Methodol. 2011, 45, 656–666. [Google Scholar] [CrossRef]
- Zhou, H.; Sun, Y.; Qin, X.; Xu, X.; Yao, R. Modeling discretionary lane-changing behavior on urban streets considering drivers’ heterogeneity. Transp. Lett. 2020, 12, 213–222. [Google Scholar] [CrossRef]
- Zheng, Z.; Ahn, S.; Chen, D.; Laval, J. Freeway traffic oscillations: Microscopic analysis of formations and propagations using wavelet transform. Procedia-Soc. Behav. Sci. 2011, 17, 702–716. [Google Scholar] [CrossRef]
- Laval, J.A.; Leclercq, L. A mechanism to describe the formation and propagation of stop-and-go waves in congested freeway traffic. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4519–4541. [Google Scholar] [CrossRef] [PubMed]
- Keyvan-Ekbatani, M.; Knoop, V.L.; Daamen, W. Categorization of the lane change decision process on freeways. Transp. Res. Part C Emerg. Technol. 2016, 69, 515–526. [Google Scholar] [CrossRef]
- Liu, W.; Chen, K.; Tian, Z.Z.; Yang, G. Capacity of urban arterial weaving sections under lane signal control strategy. Trans. Res. Rec. 2019, 2673, 69–77. [Google Scholar] [CrossRef]
- Wan, Q.; Peng, G.; Li, Z.; Inomata, F.H.T. Spatiotemporal trajectory characteristic analysis for traffic state transition prediction near expressway merge bottleneck. Transp. Res. Part C Emerg. Technol. 2020, 117, 102682. [Google Scholar] [CrossRef]
- Subraveti, H.H.S.N.; Knoop, V.L.; van Arem, B. Improving Traffic Flow Efficiency at Motorway Lane Drops by Influencing Lateral Flows. Transp. Res. Rec. 2020, 2674, 367–378. [Google Scholar] [CrossRef]
- Chen, D.; Srivastava, A.; Ahn, S.; Li, T. Traffic dynamics under speed disturbance in mixed traffic with automated and non-automated vehicles. Transp. Res. Part C Emerg. Technol. 2020, 113, 293–313. [Google Scholar] [CrossRef]
- Han, Y.; Ahn, S. Stochastic modeling of breakdown at freeway merge bottleneck and traffic control method using connected automated vehicle. Transp. Res. Part B Methodol. 2018, 107, 146–166. [Google Scholar] [CrossRef]
- Zeng, J.; Qian, Y.; Yin, F.; Zhu, L.; Xu, D. A multi-value cellular automata model for multi-lane traffic flow under lagrange coordinate. Comput. Math. Organ. Theory 2022, 28, 178–192. [Google Scholar] [CrossRef]
- Wu, J.; Kulcsár, B.; Ahn, S.; Qu, X. Emergency vehicle lane pre-clearing: From microscopic cooperation to routing decision making. Transp. Res. Part B Methodol. 2020, 141, 223–239. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Cassandras, C.G.; Li, L.; Feng, S. A bi-level cooperative driving strategy allowing lane changes. Transp. Res. Part C Emerg. Technol. 2020, 120, 102773. [Google Scholar] [CrossRef]
- Nie, Z.; Li, Z.; Wang, W.; Zhao, W.; Lian, Y.; Outbib, R. Gain-scheduling control of dynamic lateral lane change for automated and connected vehicles based on multipoint preview. IET Intell. Trans. Sys. 2020, 14, 1338–1349. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, X.; Wang, X. Research on the edge resource allocation and load balancing algorithm based on vehicle trajectory. Complexity 2022, 2022, 5090875. [Google Scholar] [CrossRef]
- Rong, S.; Wang, H.; Li, H.; Sun, W.; Gu, Q.; Lei, J. Performance-guaranteed fractional-order sliding mode control for underactuated autonomous underwater vehicle trajectory tracking with a disturbance observer. Ocean. Eng. 2022, 263, 112330. [Google Scholar] [CrossRef]
- Or, B.; Klein, I. Learning vehicle trajectory uncertainty. Eng. Appl. Artif. Intell. 2023, 122, 106101. [Google Scholar] [CrossRef]
- Yang, D.; Zheng, S.; Wen, C.; Jin, P.J.; Ran, B. A dynamic lane-changing trajectory planning model for automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 228–247. [Google Scholar] [CrossRef]
- Ouyang, P.; Liu, P.; Guo, Y.; Chen, K. Effects of configuration elements and traffic flow conditions on lane-changing rates at the weaving segments. Transp. Res. Part A Policy Pract. 2023, 171, 103652. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S.; Laval, J.; Zheng, Z. On the periodicity of traffic oscillations and capacity drop: The role of driver characteristics. Transp. Res. Part B Methodol. 2014, 59, 117–136. [Google Scholar] [CrossRef]
- Jin, W.L.; Gan, Q.J.; Lebacque, J.P. A kinematic wave theory of capacity drop. Trans. Res. Part B Methodol. 2015, 81, 316–329. [Google Scholar] [CrossRef]
- Li, L.; Jiang, R.; He, Z.; Chen, X.M.; Zhou, X. Trajectory data-based traffic flow studies: A revisit. Trans. Res. Part C Emerg. Technol. 2020, 114, 225–240. [Google Scholar] [CrossRef]
- Cassidy, M.J.; Windover, J.R. Methodology for assessing dynamics of freeway traffic flow. Transp. Res. Rec. 1995, 1484, 73–79. [Google Scholar]
- Munoz, J.C.; Daganzo, C.F. Experimental Characterization of Multi-Lane Freeway Traffic Upstream of an Off-Ramp Bottleneck; Draft report on the California PATH Program; University of California: Berkeley, CA, USA, 2000. [Google Scholar]
- Cassidy, M.J.; Anani, S.B.; Haigwood, J.M. Study of freeway traffic near an off-ramp. Transp. Res. Part A Policy Pract. 2002, 36, 563–572. [Google Scholar] [CrossRef]
- Ouyang, P.; Wu, J.; Xu, C.; Bai, L.; Li, X. Traffic safety analysis of inter-tunnel weaving section with conflict prediction models. J. Transp. Saf. Secur. 2022, 14, 630–654. [Google Scholar] [CrossRef]
- Kerner, B.S. Experimental features of self-organization in traffic flow. Phys. Rev. Lett. 1998, 81, 3797. [Google Scholar] [CrossRef]
- Smith, R.D. The dynamics of internet traffic: Self-similarity, self-organization, and complex phenomena. Adv. Complex Syst. 2011, 14, 905–949. [Google Scholar] [CrossRef]
- Hidas, P. Modelling vehicle interactions in microscopic simulation of merging and weaving. Transp. Res. Part C Emerg. Technol. 2005, 13, 37–62. [Google Scholar] [CrossRef]
- Nguyen, H.; Liu, W.; Chen, F. Discovering congestion propagation patterns in spatiotemporal traffic data. IEEE Trans. Big Data 2016, 3, 169–180. [Google Scholar] [CrossRef]
- Xiong., H.; Vahedian, A.; Zhou, X.; Li, Y.; Luo, J. Predicting traffic congestion propagation patterns: A propagation graph approach. In Proceedings of the 11th ACM SIGSPATIAL International Workshop on Computational Transportation Science, Seattle, WA, USA, 6 November 2018; pp. 60–69. [Google Scholar]
- Chang, X.; Li, H.; Rong, J.; Zhao, X. Analysis on traffic stability and capacity for mixed traffic flow with platoons of intelligent connected vehicles. Phys. A Stat. Mech. Its Appl. 2020, 557, 124829. [Google Scholar] [CrossRef]
- Feng, S.; Song, Z.; Li, Z.; Zhang, Y.; Li, L. Robust platoon control in mixed traffic flow based on tube model predictive control. IEEE Trans. Intell. Veh. 2021, 6, 711–722. [Google Scholar] [CrossRef]
- Ahn, S.; Cassidy, M.J. Freeway traffic oscillations and vehicle lane-change maneuvers. In Proceedings of the Transportation and Traffic Theory 2007, London, UK, 23–25 July 2007. [Google Scholar]
- Laval, J.A.; Daganzo, C.F. Lane-changing in traffic streams. Transp. Res. Part B Methodol. 2006, 40, 251–264. [Google Scholar] [CrossRef]
- Punzo, V.; Borzacchiello, M.T.; Ciuffo, B. On the assessment of vehicle trajectory data accuracy and application to the Next Generation SIMulation (NGSIM) program data. Transp. Res. Part C Emerg. Technol. 2011, 19, 1243–1262. [Google Scholar] [CrossRef]
- Coifman, B.; Li, L. A critical evaluation of the Next Generation Simulation (NGSIM) vehicle trajectory dataset. Transp. Res. Part B Methodol. 2017, 105, 362–377. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Explanation |
|---|---|
| Vehicle_ID | Vehicle identification number. Unit: number. |
| Frame_ID | Frame identification number (ascending by start time). Unit: 1/10 s. |
| Total_Frames | The total number of frames in which the vehicle appears in this dataset. Unit: 1/10 s. |
| Global_Time | Elapsed time since 1 January 1970. Unit: milliseconds. |
| Local_X | The distance from the front center of the vehicle to the left-most edge of the section. Unit: feet. |
| Local_Y | The distance from the front center of the vehicle to the entry edge of the section in the direction of travel. Unit: feet. |
| Vehicle_Class | 1—motorcycle, 2—auto, 3—truck |
| Velocity | The instantaneous velocity of vehicles at this point. Unit: feet/second. |
| Acceleration | Instantaneous acceleration of vehicle at this point. Unit: feet/second. |
| Lane | Mainline: 1 to 5. Auxiliary lane: 6. On-ramp: 7. Off-ramp: 8. |
| Preceding_VID | Vehicle_ID of the lead vehicle of the subject vehicle. ‘0’ represents no preceding vehicle, usually occurring at the end of the study section and off-ramp or in unsaturated traffic conditions. |
| Following_VID | Vehicle_ID of the lag vehicle of the subject vehicle. ‘0’ represents no following vehicle, usually occurring at the beginning of the study section and on-ramp or in unsaturated traffic conditions. |
| A total 6100 of tracked vehicles | Traveling OD | Through | Merge | Diverge | On- to off-Ramp |
| No. of vehicles | 5475 | 399 | 223 | 3 | |
| Vehicle Type | Motorcycle | Passenger car | Truck | ||
| No. of vehicles | 45 | 5918 | 137 | ||
| Through LC: 905 Through LCV: 760 | # of LC for an LCV | Inside | 1 | 2 | 3 | 4 |
| # of LC events | 638 | 437 | 142 | 51 | 8 | |
| # of LC for an LCV | Outside | 1 | 2 | 3 | 4 | |
| # of LC events | 267 | 206 | 40 | 21 | 0 | |
| Merging LC: 655 Merging LCV: 399 | # of LC for an LCV | 1 | 2 | 3 | 4 | 5 |
| # of LC events | 205 | 198 | 129 | 88 | 35 | |
| Diverging LC: 252 Diverging LCV: 223 | # of LC for an LCV | 1 | 2 | 3 | 4 | 5 |
| # of LC events | 211 | 16 | 0 | 1 | 1 |
| Type | Mean | Min | Max | Std | |
|---|---|---|---|---|---|
| Through vehicles | Total | 32.21 | 16.07 | 60.96 | 8.84 |
| With LC | 34.02 | 16.85 | 59.48 | 9.47 | |
| Without LC | 31.84 | 16.06 | 60.96 | 8.66 | |
| Merging vehicles | 39.22 | 18.64 | 64.27 | 10.22 | |
| Diverging vehicles | 42.63 | 17.54 | 56.98 | 7.65 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, P.; Yang, B. Evaluation of Spatiotemporal Characteristics of Lane-Changing at the Freeway Weaving Area from Trajectory Data. Sustainability 2024, 16, 1639. https://doi.org/10.3390/su16041639
Ouyang P, Yang B. Evaluation of Spatiotemporal Characteristics of Lane-Changing at the Freeway Weaving Area from Trajectory Data. Sustainability. 2024; 16(4):1639. https://doi.org/10.3390/su16041639
Chicago/Turabian StyleOuyang, Pengying, and Bo Yang. 2024. "Evaluation of Spatiotemporal Characteristics of Lane-Changing at the Freeway Weaving Area from Trajectory Data" Sustainability 16, no. 4: 1639. https://doi.org/10.3390/su16041639