
Multi-Objective Optimization for Sustainable Pavement Maintenance Decision Making by Integrating Pavement Image Segmentation and TOPSIS Methods


Abstract
:1. Introduction
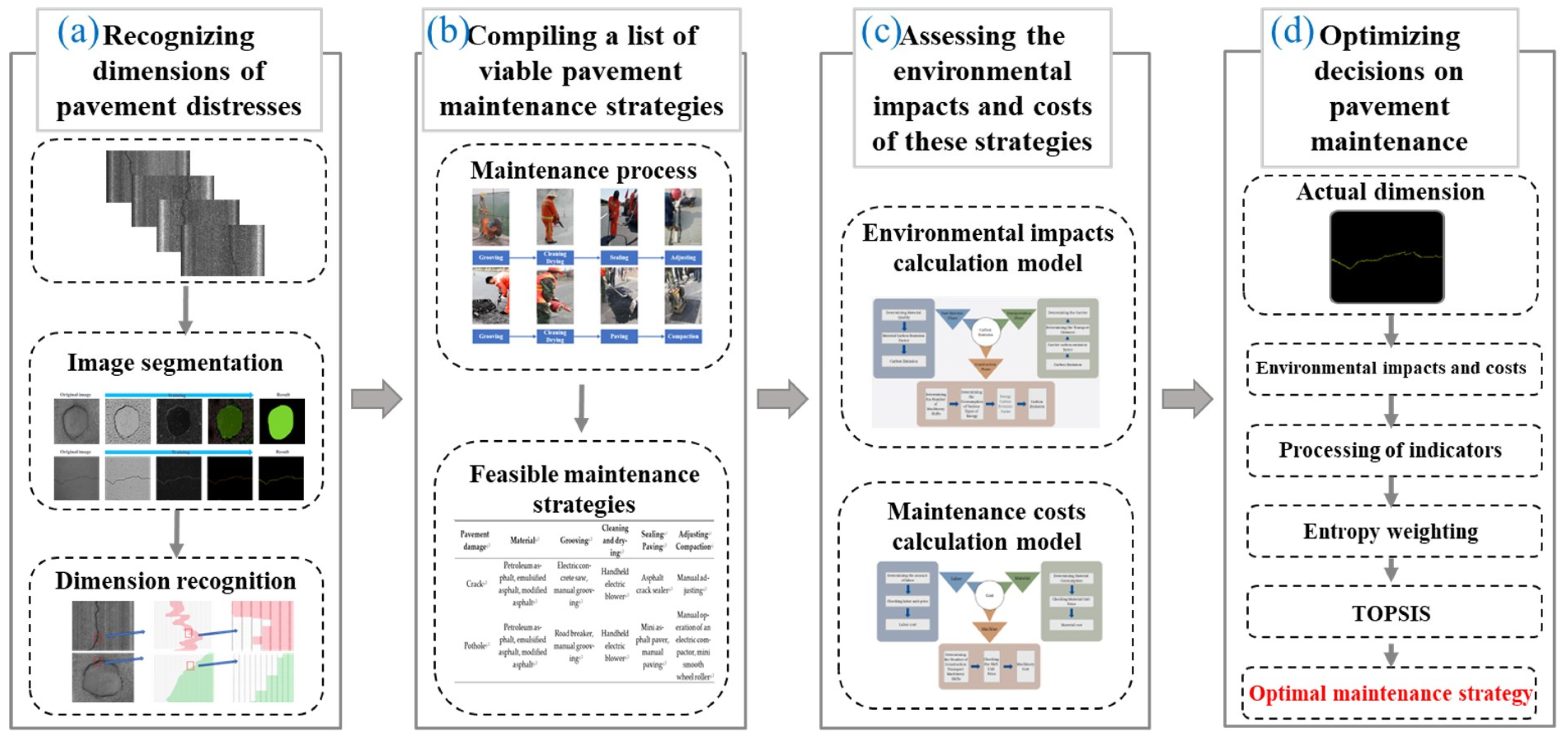
2. Research Framework
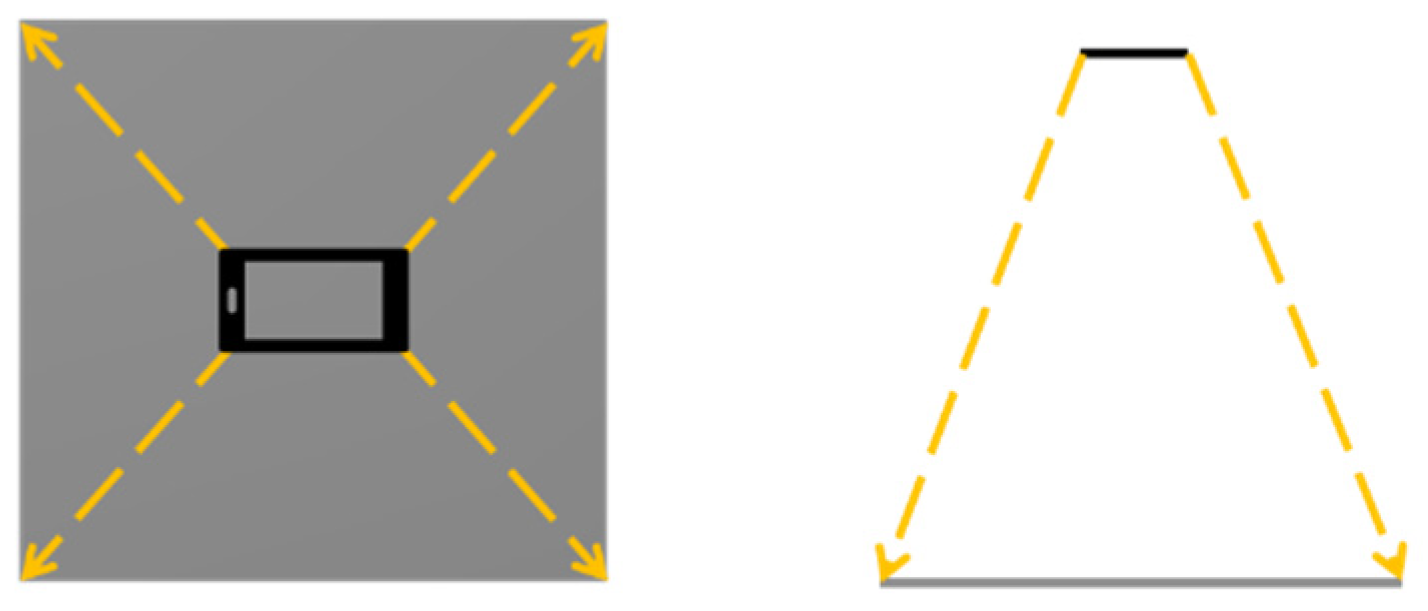
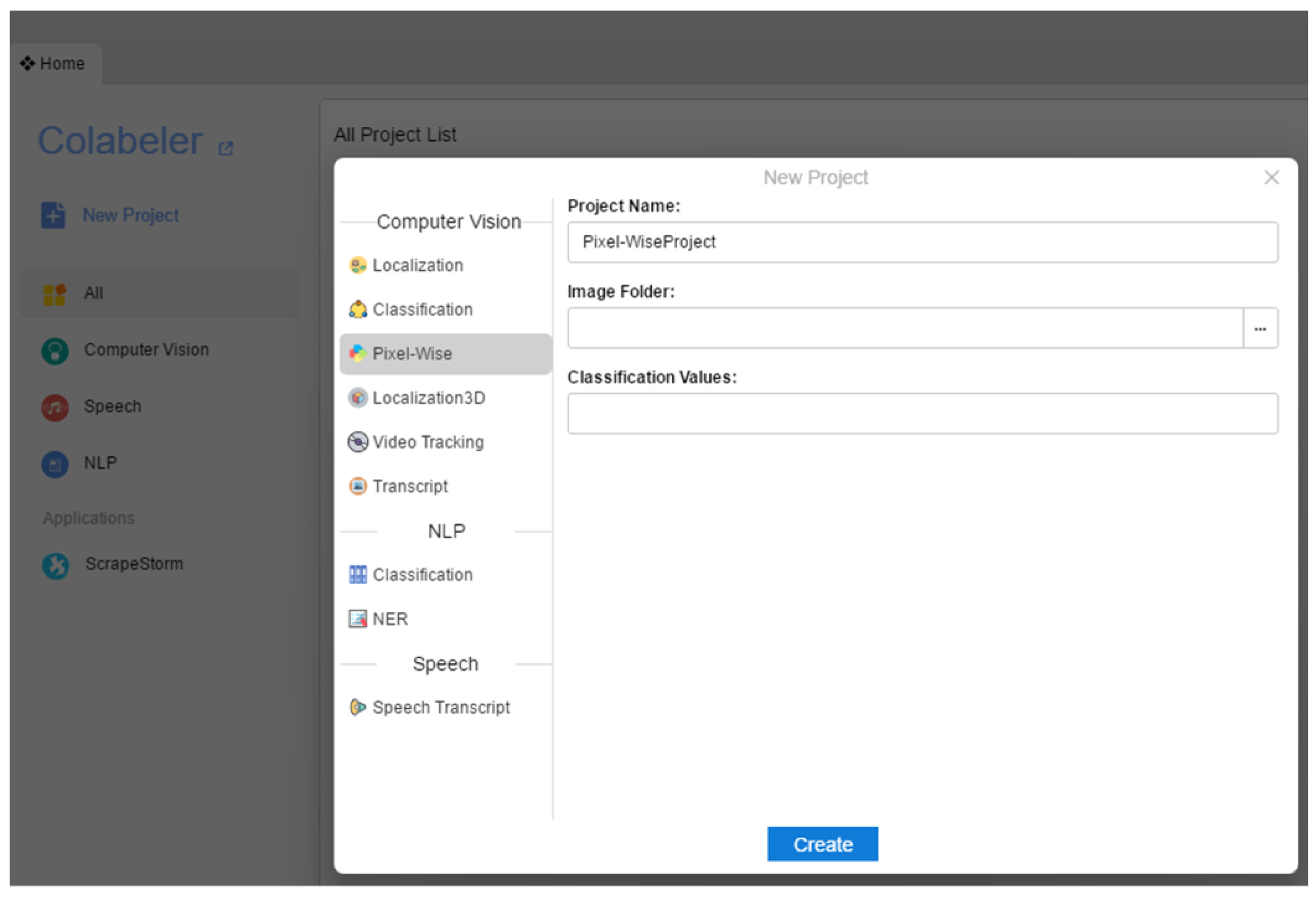
2.1. Recognizing Dimensions of Pavement Distresses
2.2. Compiling a List of Viable Pavement Maintenance Strategies
2.3. Assessing the Carbon Emissions and Costs of These Strategies
2.3.1. Carbon Emissions Calculation Model
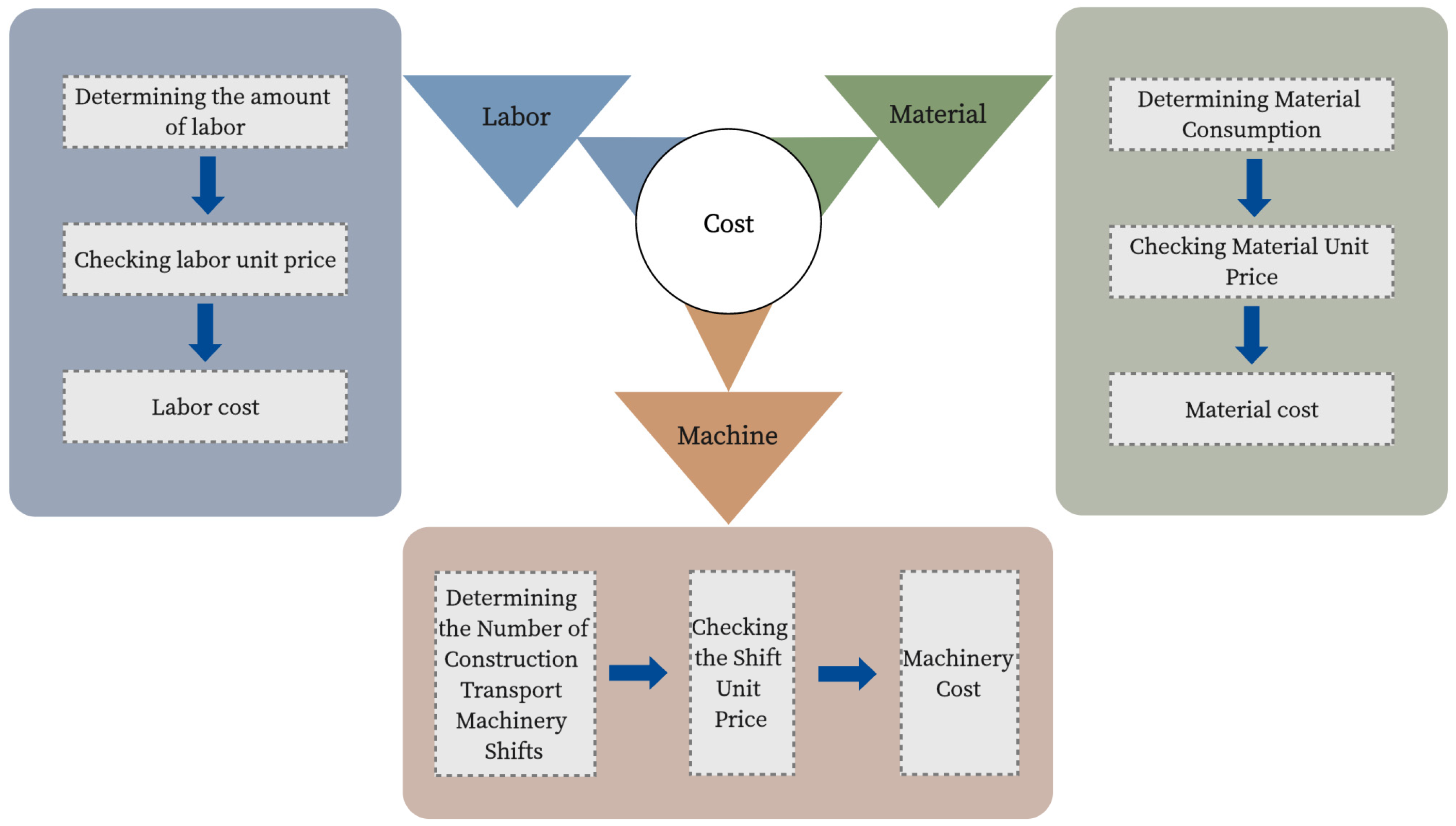
2.3.2. Maintenance Costs Calculation Model
2.4. Optimizing Decisions on Pavement Maintenance
3. Data Collection and Processing
3.1. Data Collection
3.2. Data Processing
4. Experiments and Results
4.1. Model Training
4.2. Dimension Recognition Result
4.3. Optimal Maintenance Strategy
5. Conclusions
- (1)
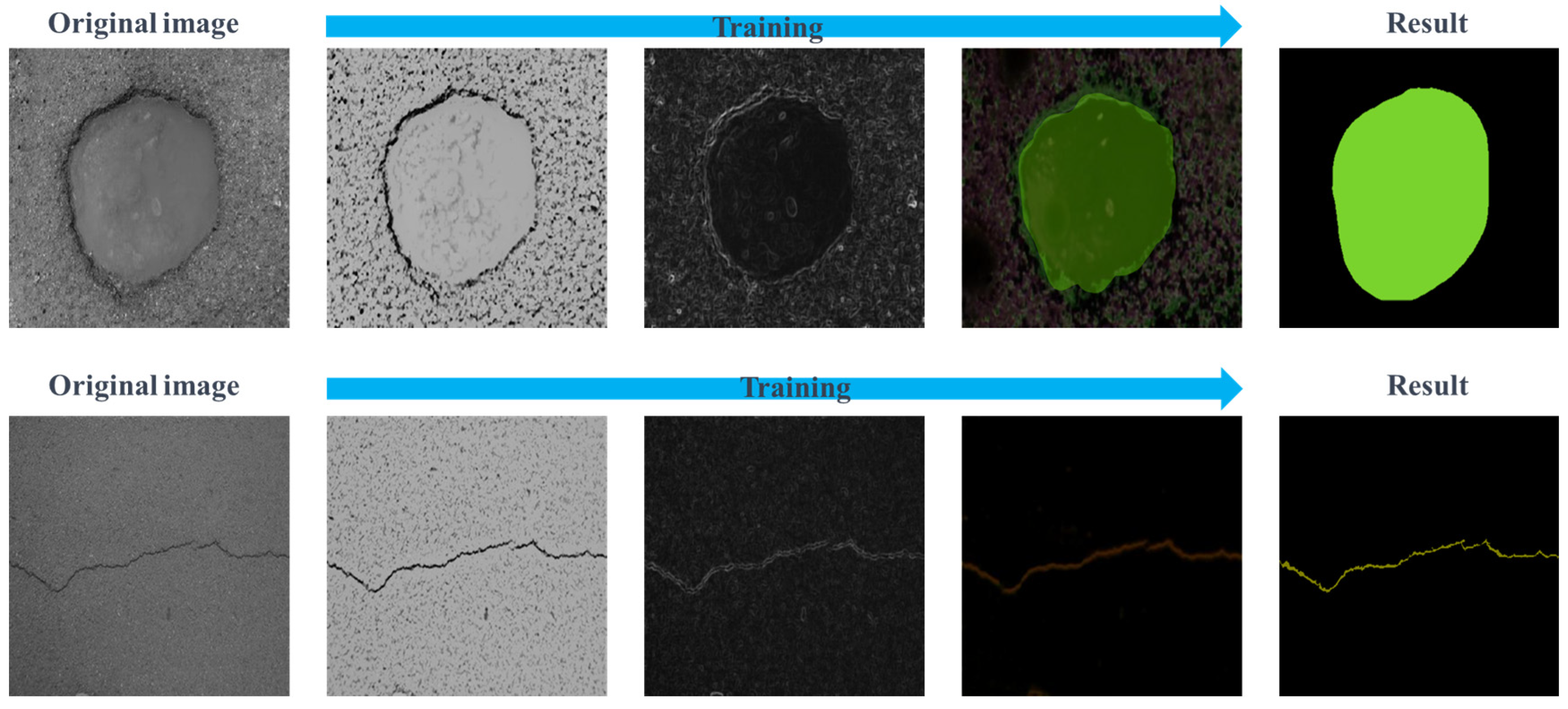
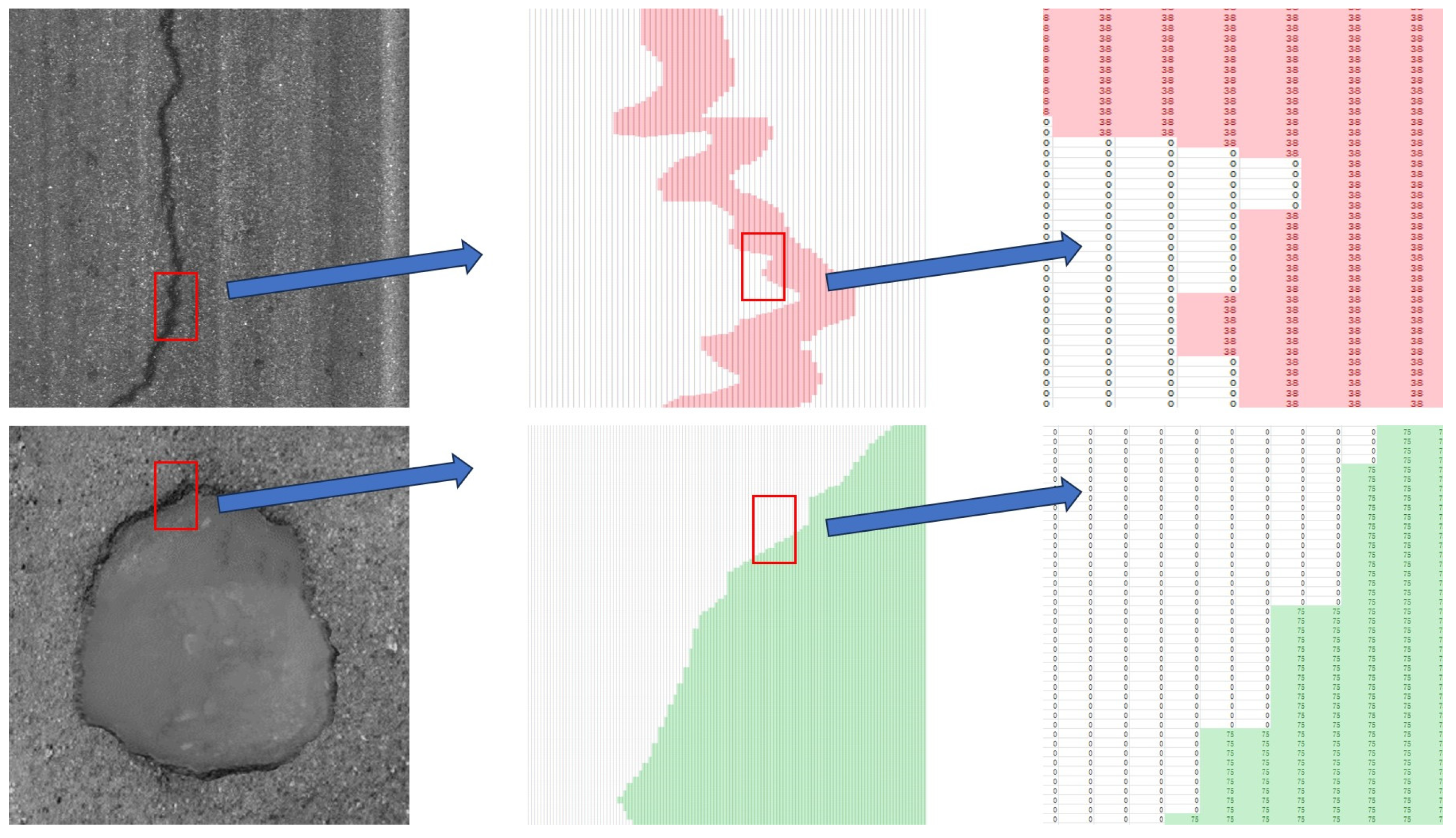
- The U-Net algorithm is known for its symmetric U-shaped structure and effective jump connections, which enables it to achieve accurate image segmentation even on limited datasets, and likewise U-Net has a smaller dimension compared to other image segmentation algorithms. In the training process of this paper, the algorithm has achieved a loss value of 0.3312, which indicates that the segmentation is 96.88% efficient. Through accurate image segmentation, combining picture pixels with actual dimensions, this study accurately identifies the detected pavement damage dimensions, which provides a basis for calculating the pavement condition index, the carbon emissions of the maintenance program, and the maintenance cost.
- (2)
- This study accurately categorizes and identifies the dimension of the pavement damage in combination with actual cases and gives the decision of whether maintenance is needed or not by combining the PCI calculation formula. On this basis, decomposing the pavement damage maintenance process lists the labor, materials, and machines needed for maintenance, and then proposes all feasible maintenance strategies. Then, the carbon emissions and maintenance costs of these maintenance options were calculated by combining the actual dimensions of the pavement damage. Finally, through the multi-objective decision-making method based on the improved entropy-weighted TOPSIS model, the optimal maintenance strategy for cracks, in this case, was obtained by using petroleum asphalt as the material, grooving with a motorized cutter, cleaning and drying the cracks with a handheld motorized blower, grouting with an asphalt grouting machine, and, finally, repairing manually. For potholes, the optimal maintenance strategy is to use emulsified asphalt as material, use a road breaker for grooving, portable electric blower for cleaning and drying cracks, take manual paving, and, finally, use a small light wheel roller for compaction. The comprehensive score of this program is 99.16, the carbon emission generated in this case is 33.75 kg, and the cost of maintenance is CNY 464.99.
- (3)
- From Conclusion 2, it can be seen that the multi-objective decision-making model proposed in this study is able to give a specific low-carbon and economical maintenance strategy based on specific pavement conditions instead of giving a maintenance strategy that applies to all pavements. The problem that one model cannot be applied to most pavements is solved, and the generalizability of the decision-making model is greatly improved.
- (1)
- In this study, only the actual area of the pavement damage was recognized when the pavement damage dimension recognition was performed, and the depth of the damage could not be accurately recognized, so the common depth of these damages was taken as the actual depth of the pavement damage. Future research can combine 3D image recognition technology to obtain a more accurate depth of pavement damage.
- (2)
- Due to the limitation of obtaining the carbon emission factor of materials, this study is not comprehensive enough in the selection of materials, and in the future, if the carbon emission factor of more new materials can be obtained, a lower carbon economic maintenance strategy can be proposed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zakeri, H.; Nejad, F.M.; Fahimifar, A.; Torshizi, A.D.; Zarandi, M.H.F. A Multi-Stage Expert System for Classification of Pavement Cracking. In Proceedings of the 2013 Joint IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), Edmonton, AB, Canada, 24–28 June 2013; pp. 1125–1130. [Google Scholar]
- Gavilán, M.; Balcones, D.; Marcos, O.; Llorca, D.F.; Sotelo, M.A.; Parra, I.; Ocaña, M.; Aliseda, P.; Yarza, P.; Amírola, A. Adaptive Road Crack Detection System by Pavement Classification. Sensors 2011, 11, 9628–9657. [Google Scholar] [CrossRef] [PubMed]
- Nhat-Duc, H.; Nguyen, Q.-L.; Tran, V.-D. Automatic Recognition of Asphalt Pavement Cracks Using Metaheuristic Optimized Edge Detection Algorithms and Convolution Neural Network. Autom. Constr. 2018, 94, 203–213. [Google Scholar] [CrossRef]
- Oreto, C.; Veropalumbo, R.; Viscione, N.; Biancardo, S.A.; Russo, F. Investigating the Environmental Impacts and Engineering Performance of Road Asphalt Pavement Mixtures Made up of Jet Grouting Waste and Reclaimed Asphalt Pavement. Environ. Res. 2021, 198, 111277. [Google Scholar] [CrossRef]
- Zhang, J.; Sesay, T.; You, Q.; Jing, H. Maximizing the Application of RAP in Asphalt Concrete Pavements and Its Long-Term Performance: A Review. Polymers 2022, 14, 4736. [Google Scholar] [CrossRef] [PubMed]
- Bang, S.; Park, S.; Kim, H.; Kim, H. Encoder–Decoder Network for Pixel-Level Road Crack Detection in Black-Box Images. Comput. -Aided Civ. Infrastruct. Eng. 2019, 34, 713–727. [Google Scholar] [CrossRef]
- Li, S.; Zhao, X.; Zhou, G. Automatic Pixel-Level Multiple Damage Detection of Concrete Structure Using Fully Convolutional Network. Comput. -Aided Civ. Infrastruct. Eng. 2019, 34, 616–634. [Google Scholar] [CrossRef]
- Majidifard, H.; Adu-Gyamfi, Y.; Buttlar, W.G. Deep Machine Learning Approach to Develop a New Asphalt Pavement Condition Index. Constr. Build. Mater. 2020, 247, 118513. [Google Scholar] [CrossRef]
- Ouma, Y.O.; Hahn, M. Pothole Detection on Asphalt Pavements from 2D-Colour Pothole Images Using Fuzzy c-Means Clustering and Morphological Reconstruction. Autom. Constr. 2017, 83, 196–211. [Google Scholar] [CrossRef]
- Hoang, N.-D.; Nguyen, Q.-L.; Tien Bui, D. Image Processing–Based Classification of Asphalt Pavement Cracks Using Support Vector Machine Optimized by Artificial Bee Colony. J. Comput. Civ. Eng. 2018, 32, 04018037. [Google Scholar] [CrossRef]
- Yu, G.; Dong, J.; Wang, Y.; Zhou, X. RUC-Net: A Residual-Unet-Based Convolutional Neural Network for Pixel-Level Pavement Crack Segmentation. Sensors 2023, 23, 53. [Google Scholar] [CrossRef]
- Yu, B.; Gu, X.; Ni, F.; Guo, R. Multi-Objective Optimization for Asphalt Pavement Maintenance Plans at Project Level: Integrating Performance, Cost and Environment. Transp. Res. Part D Transp. Environ. 2015, 41, 64–74. [Google Scholar] [CrossRef]
- Hamdi, H.; Hadiwardoyo, S.P.; Correia, A.G.; Pereira, P. Pavement Maintenance Optimization Strategies for National Road Network in Indonesia Applying Genetic Algorithm. Procedia Eng. 2017, 210, 253–260. [Google Scholar] [CrossRef]
- Santos, J.; Ferreira, A.; Flintsch, G. An Adaptive Hybrid Genetic Algorithm for Pavement Management. Int. J. Pavement Eng. 2019, 20, 266–286. [Google Scholar] [CrossRef]
- Lee, J.; Madanat, S. Jointly Optimal Policies for Pavement Maintenance, Resurfacing and Reconstruction. EURO J. Transp. Logist. 2015, 4, 75–95. [Google Scholar] [CrossRef]
- Heidari, M.R.; Heravi, G.; Esmaeeli, A.N. Integrating Life-Cycle Assessment and Life-Cycle Cost Analysis to Select Sustainable Pavement: A Probabilistic Model Using Managerial Flexibilities. J. Clean. Prod. 2020, 254, 120046. [Google Scholar] [CrossRef]
- Vargas, D.E.C.; Lemonge, A.C.C.; Barbosa, H.J.C.; Bernardino, H.S. Solving Multi-Objective Structural Optimization Problems Using GDE3 and NSGA-II with Reference Points. Eng. Struct. 2021, 239, 112187. [Google Scholar] [CrossRef]
- Leite, B.; da Costa, A.O.S.; Costa Junior, E.F. da Multi-Objective Optimization of Adiabatic Styrene Reactors Using Generalized Differential Evolution 3 (GDE3). Chem. Eng. Sci. 2023, 265, 118196. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, D. Numerical Analysis of a Multi-Objective Maintenance Decision-Making Model for Sustainable Highway Networks: Integrating the GDE3 Method, LCA and LCCA. Energy Build. 2023, 290, 113096. [Google Scholar] [CrossRef]
- Behzadian, M.; Khanmohammadi Otaghsara, S.; Yazdani, M.; Ignatius, J. A State-of the-Art Survey of TOPSIS Applications. Expert Syst. Appl. 2012, 39, 13051–13069. [Google Scholar] [CrossRef]
- Gong, H.; Liu, L.; Liang, H.; Zhou, Y.; Cong, L. A State-of-the-Art Survey of Deep Learning Models for Automated Pavement Crack Segmentation. Int. J. Transp. Sci. Technol. 2024, 13, 44–57. [Google Scholar] [CrossRef]
- JTG 5210—2018; Highway Performance Assessment Standard. Ministry of Transport of the People’s Republic of China: Beijing, China, 2019.
- JTG 5142—2019; Technical Specifications for Maintenance of Highway Asphalt Pavement. Ministry of Transport of the People’s Republic of China: Beijing, China, 2019.
- GB/T 51366—2019; Standard for building carbon emission calculation. Ministry of Housing and Urban-Rural Development of the People's Republic of China: Beijing, China, 2019.
- JTG/T 3833—2018; Cost Quota of Highway Engineering Machine Shifts. Ministry of Transport of the People’s Republic of China: Beijing, China, 2019.
- Jin, Q.; Meng, Z.; Pham, T.D.; Chen, Q.; Wei, L.; Su, R. DUNet: A Deformable Network for Retinal Vessel Segmentation. Knowl.-Based Syst. 2019, 178, 149–162. [Google Scholar] [CrossRef]
- Schlemper, J.; Oktay, O.; Schaap, M.; Heinrich, M.; Kainz, B.; Glocker, B.; Rueckert, D. Attention Gated Networks: Learning to Leverage Salient Regions in Medical Images. Med. Image Anal. 2019, 53, 197–207. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 9351, pp. 234–241. ISBN 978-3-319-24573-7. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grading | Exceptional | Excellent | Good | Moderate | Poor | Very Poor |
|---|---|---|---|---|---|---|
| PCI | 100~91 | 90~8l | 80~71 | 70~51 | 50~31 | ≤30 |
| Maintenance Countermeasures | - | Routine maintenance | Minor repair | Medium repair | Major repair | Reconstruction |
| Pavement Damage | Material | Grooving | Cleaning and Drying | Sealing Paving | Adjusting Compaction |
|---|---|---|---|---|---|
| Crack | Petroleum asphalt, emulsified asphalt, modified asphalt | Electric concrete saw, manual grooving | Handheld electric blower | Asphalt crack sealer | Manual adjusting |
| Pothole | Petroleum asphalt, emulsified asphalt, modified asphalt | Road breaker, manual grooving | Handheld electric blower | Mini asphalt paver, manual paving | Manual operation of an electric compactor, mini smooth wheel roller |
| No. | Distress | Material | Grooving | Cleaning and Drying | Sealing Paving | Adjusting Compaction |
|---|---|---|---|---|---|---|
| 1 | Crack | Petroleum asphalt | Manual grooving | Handheld electric blower | Asphalt crack sealer | Manual adjusting |
| Pothole | Emulsified asphalt | Manual grooving | Manual paving | Manual operation of an electric compactor | ||
| 2 | Crack | Petroleum asphalt | Manual grooving | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Manual grooving | Mini asphalt paver | Manual operation of an electric compactor | ||
| 3 | Crack | Petroleum asphalt | Manual grooving | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Manual grooving | Manual paving | Mini Smooth wheel roller | ||
| 4 | Crack | Petroleum asphalt | Manual grooving | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Manual grooving | Mini asphalt paver | Mini Smooth wheel roller | ||
| 5 | Crack | Petroleum asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Manual grooving | Manual paving | Manual operation of an electric compactor | ||
| 6 | Crack | Petroleum asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Manual grooving | Mini asphalt paver | Manual operation of an electric compactor | ||
| 103 | Crack | Modified asphalt | Electric concrete saw | Handheld electric blower | Asphalt crack sealer | Manual adjusting |
| Pothole | Emulsified asphalt | Manual grooving | Manual paving | Mini Smooth wheel roller | ||
| 104 | Crack | Modified asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Manual grooving | Mini asphalt paver | Mini Smooth wheel roller | ||
| 105 | Crack | Modified asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Road breaker | Manual paving | Manual operation of an electric compactor | ||
| 106 | Crack | Modified asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Road breaker | Mini asphalt paver | Manual operation of an electric compactor | ||
| 107 | Crack | Modified asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Road breaker | Manual paving | Mini Smooth wheel roller | ||
| 108 | Crack | Modified asphalt | Electric concrete saw | Asphalt crack sealer | Manual adjusting | |
| Pothole | Emulsified asphalt | Road breaker | Mini asphalt paver | Mini Smooth wheel roller | ||
| No. | Materials | Price (CNY/t) |
|---|---|---|
| 1 | Petroleum asphalt | 4950 |
| 2 | Emulsified asphalt | 4200 |
| 3 | Modified asphalt | 6050 |
| No. | Machines | Price (CNY/Shift) |
|---|---|---|
| 1 | Electric concrete saw (with manual operation) | 303.05 |
| 2 | Handheld blower (without manual operation) | 2.07 |
| 3 | Asphalt crack sealer (with manual operation) | 209.78 |
| 4 | Road breaker (with manual operation) | 212.08 |
| 5 | Mini asphalt paver (with manual operation) | 652.84 |
| 6 | Electric compactor (without manual operation) | 32.08 |
| 7 | Mini smooth wheel roller (with manual operation) | 361.02 |
| 8 | Eight-ton truck (with manual operation) | 605.04 |
| No. | Materials | Carbon Emission Factors (kgCO2/kg) |
|---|---|---|
| 1 | Petroleum asphalt | 136.8 |
| 2 | Emulsified asphalt | 166.3 |
| 3 | Modified asphalt | 259.7 |
| Transportation Mode | Carbon Emission Factors [kgCO2/(t·km)] |
|---|---|
| Light-duty diesel truck transportation (2-ton capacity) | 0.286 |
| Medium-duty diesel truck transportation (8-ton capacity) | 0.179 |
| Heavy-duty diesel truck transportation (10-ton capacity) | 0.162 |
| Heavy-duty diesel truck transportation (18-ton capacity) | 0.129 |
| Heavy-duty diesel truck transportation (30-ton capacity) | 0.078 |
| Heavy-duty diesel truck transportation (46-ton capacity) | 0.057 |
| No. | Machines | Diesel Fuel (kg/Shift) | Electricity (k·Wh/Shift) |
|---|---|---|---|
| 1 | Electric concrete saw | - | 18.95 |
| 2 | Handheld blower | - | 0.2 |
| 3 | Asphalt crack sealer | 9.81 | - |
| 4 | Road breaker | 9.6 | - |
| 5 | Mini asphalt paver | 27.43 | - |
| 6 | Electric compactor | - | 17.34 |
| 7 | Mini smooth wheel roller | 19.2 | - |
| Parameter | Value |
|---|---|
| Batch | 2, 4, 8 |
| Epochs | 40, 50, 60, 70 |
| Optimizer | Adam |
| Loss function | Binary Cross-Entropy Loss |
| Dropout | 0.2, 0.3 |
| Parameter Settings | |
|---|---|
| Batch | 4 |
| Epochs | 60 |
| optimizer | Adam |
| loss function | Binary Cross-Entropy Loss |
| Dropout | 0.3 |
| No. | Pavement Damage | Number of Pixels | Actual Area (cm2) | No. | Pavement Damage | Number of Pixels | Actual Area (cm2) |
|---|---|---|---|---|---|---|---|
| 1 | Pothole | 310,242 | 1365.065 | 11 | Crack | 15,092 | 66.4048 |
| 2 | Pothole | 240,391 | 1057.72 | 12 | Crack | 15,043 | 66.1892 |
| 3 | Pothole | 289,201 | 1272.484 | 13 | Crack | 12,016 | 52.8704 |
| 4 | Crack | 10,923 | 48.0612 | 14 | Crack | 14,230 | 62.612 |
| 5 | Crack | 13,492 | 59.3648 | 15 | Crack | 15,023 | 66.1012 |
| 6 | Crack | 23,410 | 103.004 | 16 | Crack | 14,830 | 65.252 |
| 7 | Crack | 10,231 | 45.0164 | 17 | Crack | 11,042 | 48.5848 |
| 8 | Crack | 16,923 | 74.4612 | 18 | Crack | 10,321 | 45.4124 |
| 9 | Crack | 13,921 | 61.2524 | 19 | Crack | 9431 | 41.4964 |
| 10 | Crack | 9102 | 40.0488 | 20 | Crack | 13,021 | 57.2924 |
| No. | Cost (CNY) | Carbon Emissions (kgCO2) | No. | Cost (CNY) | Carbon Emissions (kgCO2) | No. | Cost (CNY) | Carbon Emissions (kgCO2) |
|---|---|---|---|---|---|---|---|---|
| 1 | 535.32 | 22.44 | 37 | 543.02 | 31.56 | 73 | 565.90 | 35.96 |
| 2 | 556.42 | 33.03 | 38 | 564.09 | 31.69 | 74 | 587.18 | 36.10 |
| 3 | 520.18 | 28.61 | 39 | 527.82 | 30.56 | 75 | 551.13 | 34.98 |
| 4 | 541.27 | 29.87 | 40 | 548.89 | 31.95 | 76 | 572.41 | 36.37 |
| 5 | 513.41 | 23.84 | 41 | 521.00 | 33.45 | 77 | 544.73 | 37.89 |
| 6 | 534.51 | 34.44 | 42 | 542.07 | 33.58 | 78 | 566.01 | 38.02 |
| 7 | 498.27 | 30.01 | 43 | 505.81 | 32.45 | 79 | 529.96 | 36.90 |
| 8 | 519.36 | 31.28 | 44 | 526.88 | 33.83 | 80 | 551.23 | 38.30 |
| 9 | 480.13 | 27.58 | 45 | 487.62 | 33.96 | 81 | 512.19 | 38.43 |
| 10 | 501.22 | 38.18 | 46 | 508.69 | 41.53 | 82 | 533.46 | 44.32 |
| 11 | 464.99 | 33.75 | 47 | 472.42 | 35.44 | 83 | 497.41 | 37.92 |
| 12 | 486.08 | 44.35 | 48 | 493.49 | 45.82 | 84 | 518.69 | 48.09 |
| 13 | 539.48 | 29.16 | 49 | 546.68 | 32.76 | 85 | 564.02 | 36.84 |
| 14 | 560.67 | 29.29 | 50 | 567.77 | 32.89 | 86 | 585.21 | 36.97 |
| 15 | 524.54 | 28.16 | 51 | 531.53 | 31.76 | 87 | 549.08 | 35.85 |
| 16 | 545.73 | 29.55 | 52 | 552.62 | 33.14 | 88 | 570.27 | 37.24 |
| 17 | 517.98 | 31.06 | 53 | 524.76 | 34.65 | 89 | 542.51 | 38.74 |
| 18 | 539.17 | 31.19 | 54 | 545.85 | 34.77 | 90 | 563.71 | 38.88 |
| 19 | 503.04 | 30.06 | 55 | 509.61 | 33.64 | 91 | 527.57 | 37.75 |
| 20 | 524.23 | 31.45 | 56 | 530.70 | 35.03 | 92 | 548.77 | 39.14 |
| 21 | 485.10 | 31.58 | 57 | 491.46 | 35.15 | 93 | 509.64 | 39.27 |
| 22 | 506.30 | 40.29 | 58 | 512.55 | 42.16 | 94 | 530.84 | 44.59 |
| 23 | 470.16 | 34.41 | 59 | 476.31 | 35.96 | 95 | 494.70 | 38.08 |
| 24 | 491.36 | 44.94 | 60 | 497.40 | 46.27 | 96 | 515.90 | 48.17 |
| 25 | 541.55 | 30.30 | 61 | 554.51 | 34.32 | 97 | 565.93 | 38.19 |
| 26 | 562.66 | 30.43 | 62 | 575.68 | 34.45 | 98 | 587.11 | 38.32 |
| 27 | 526.45 | 29.29 | 63 | 539.52 | 33.33 | 99 | 550.95 | 37.19 |
| 28 | 547.56 | 30.68 | 64 | 560.70 | 34.72 | 100 | 572.12 | 38.58 |
| 29 | 519.72 | 32.18 | 65 | 532.92 | 36.23 | 101 | 544.34 | 40.09 |
| 30 | 540.83 | 32.31 | 66 | 554.09 | 36.36 | 102 | 565.51 | 40.22 |
| 31 | 504.61 | 31.17 | 67 | 517.93 | 35.23 | 103 | 529.36 | 39.10 |
| 32 | 525.73 | 32.56 | 68 | 539.10 | 36.62 | 104 | 550.53 | 40.49 |
| 33 | 486.51 | 32.69 | 69 | 499.95 | 36.76 | 105 | 511.38 | 40.62 |
| 34 | 507.63 | 40.82 | 70 | 521.12 | 43.20 | 106 | 532.55 | 45.37 |
| 35 | 471.41 | 34.83 | 71 | 484.97 | 36.90 | 107 | 496.39 | 38.76 |
| 36 | 492.52 | 45.29 | 72 | 506.14 | 47.14 | 108 | 517.56 | 48.78 |
| No. | Score | No. | Score | No. | Score | No. | Score |
|---|---|---|---|---|---|---|---|
| 1 | 28.38 | 28 | 13.30 | 55 | 64.63 | 82 | 26.93 |
| 2 | 7.05 | 29 | 48.56 | 56 | 31.40 | 83 | 81.03 |
| 3 | 48.51 | 30 | 19.33 | 57 | 87.77 | 84 | 48.41 |
| 4 | 19.26 | 31 | 72.59 | 58 | 58.79 | 85 | 3.48 |
| 5 | 60.61 | 32 | 39.01 | 59 | 97.07 | 86 | 0.18 |
| 6 | 26.40 | 33 | 92.22 | 60 | 79.97 | 87 | 11.51 |
| 7 | 81.25 | 34 | 66.65 | 61 | 8.00 | 88 | 1.75 |
| 8 | 49.29 | 35 | 98.44 | 62 | 0.98 | 89 | 16.99 |
| 9 | 96.61 | 36 | 85.40 | 63 | 20.60 | 90 | 3.50 |
| 10 | 76.18 | 37 | 17.23 | 64 | 4.87 | 91 | 35.56 |
| 11 | 99.16 | 38 | 3.87 | 65 | 28.25 | 92 | 11.53 |
| 12 | 91.00 | 39 | 36.21 | 66 | 8.09 | 93 | 63.75 |
| 13 | 21.33 | 40 | 12.06 | 67 | 50.97 | 94 | 30.39 |
| 14 | 5.51 | 41 | 46.28 | 68 | 20.70 | 95 | 84.08 |
| 15 | 41.70 | 42 | 17.89 | 69 | 78.05 | 96 | 52.87 |
| 16 | 15.04 | 43 | 70.62 | 70 | 44.94 | 97 | 2.81 |
| 17 | 51.59 | 44 | 37.08 | 71 | 92.70 | 98 | 0.12 |
| 18 | 21.30 | 45 | 91.21 | 72 | 68.16 | 99 | 10.06 |
| 19 | 75.02 | 46 | 64.94 | 73 | 2.93 | 100 | 1.34 |
| 20 | 41.50 | 47 | 98.18 | 74 | 0.19 | 101 | 15.18 |
| 21 | 93.35 | 48 | 84.36 | 75 | 10.10 | 102 | 2.87 |
| 22 | 68.72 | 49 | 13.74 | 76 | 1.38 | 103 | 32.85 |
| 23 | 98.69 | 50 | 2.63 | 77 | 14.96 | 104 | 10.17 |
| 24 | 86.57 | 51 | 30.72 | 78 | 2.80 | 105 | 60.85 |
| 25 | 18.90 | 52 | 9.28 | 79 | 32.22 | 106 | 28.06 |
| 26 | 4.54 | 53 | 40.19 | 80 | 9.79 | 107 | 82.10 |
| 27 | 38.52 | 54 | 14.23 | 81 | 59.83 | 108 | 50.16 |
| Pavement Damage | Material | Grooving | Cleaning and Drying | Sealing Paving | Adjusting Compaction |
|---|---|---|---|---|---|
| Crack | Petroleum asphalt | Electric concrete saw | Handheld electric blower | Asphalt crack sealer | Manual adjusting |
| Pothole | Emulsified asphalt | Road breaker | Handheld electric blower | Manual paving | Mini smooth wheel roller |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chong, D.; Liao, P.; Fu, W. Multi-Objective Optimization for Sustainable Pavement Maintenance Decision Making by Integrating Pavement Image Segmentation and TOPSIS Methods. Sustainability 2024, 16, 1257. https://doi.org/10.3390/su16031257
Chong D, Liao P, Fu W. Multi-Objective Optimization for Sustainable Pavement Maintenance Decision Making by Integrating Pavement Image Segmentation and TOPSIS Methods. Sustainability. 2024; 16(3):1257. https://doi.org/10.3390/su16031257
Chicago/Turabian StyleChong, Dan, Peiyi Liao, and Wurong Fu. 2024. "Multi-Objective Optimization for Sustainable Pavement Maintenance Decision Making by Integrating Pavement Image Segmentation and TOPSIS Methods" Sustainability 16, no. 3: 1257. https://doi.org/10.3390/su16031257