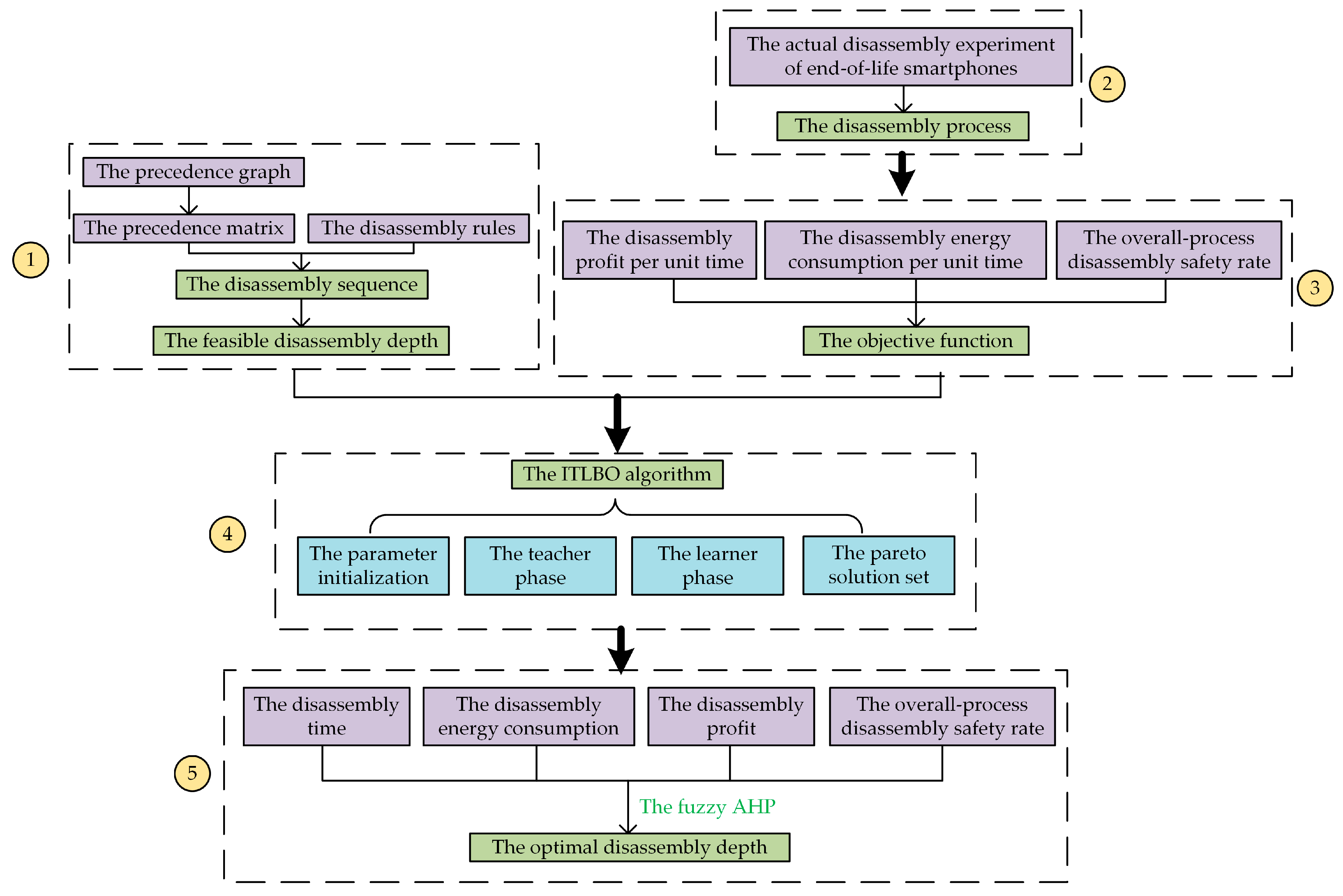
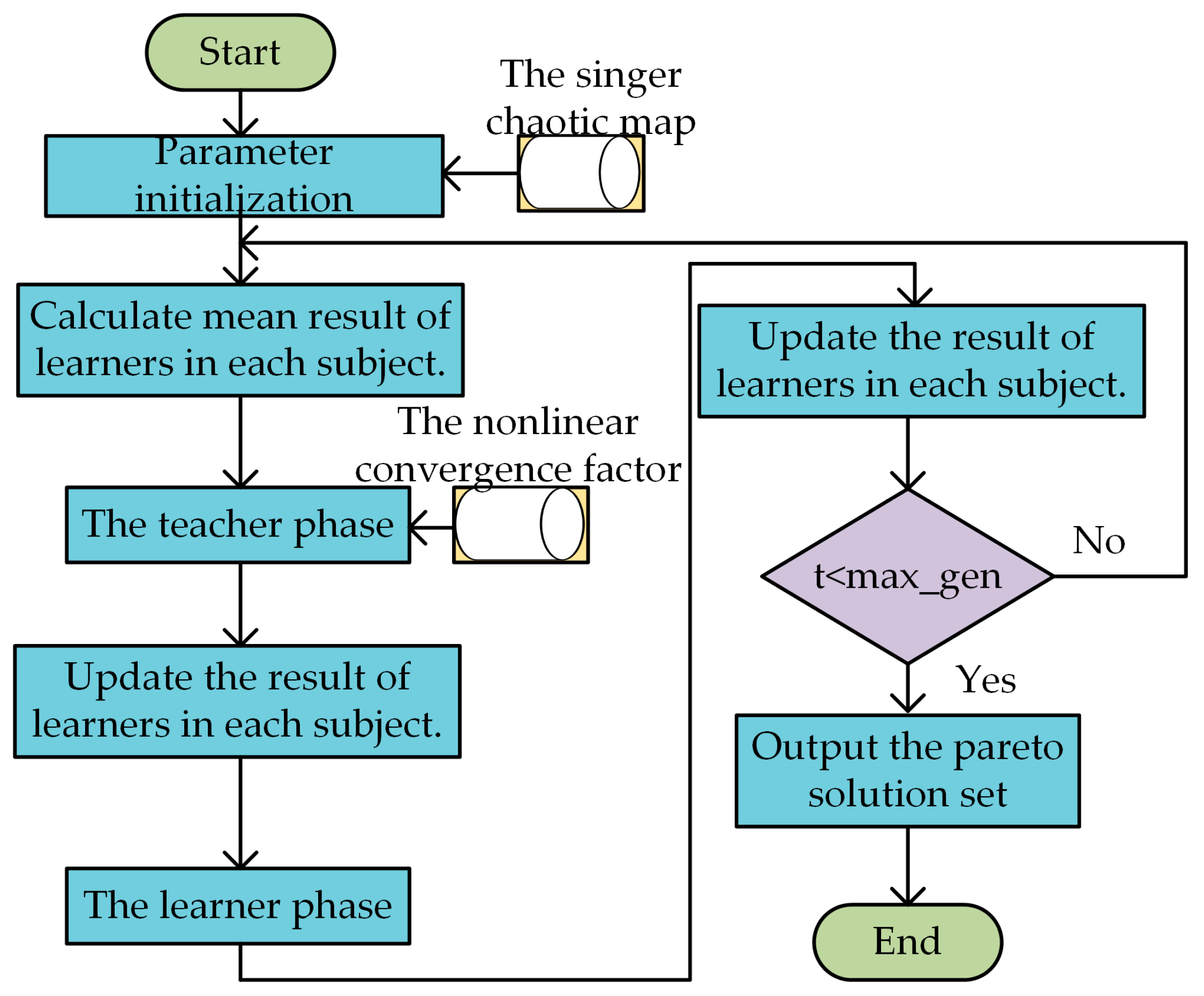
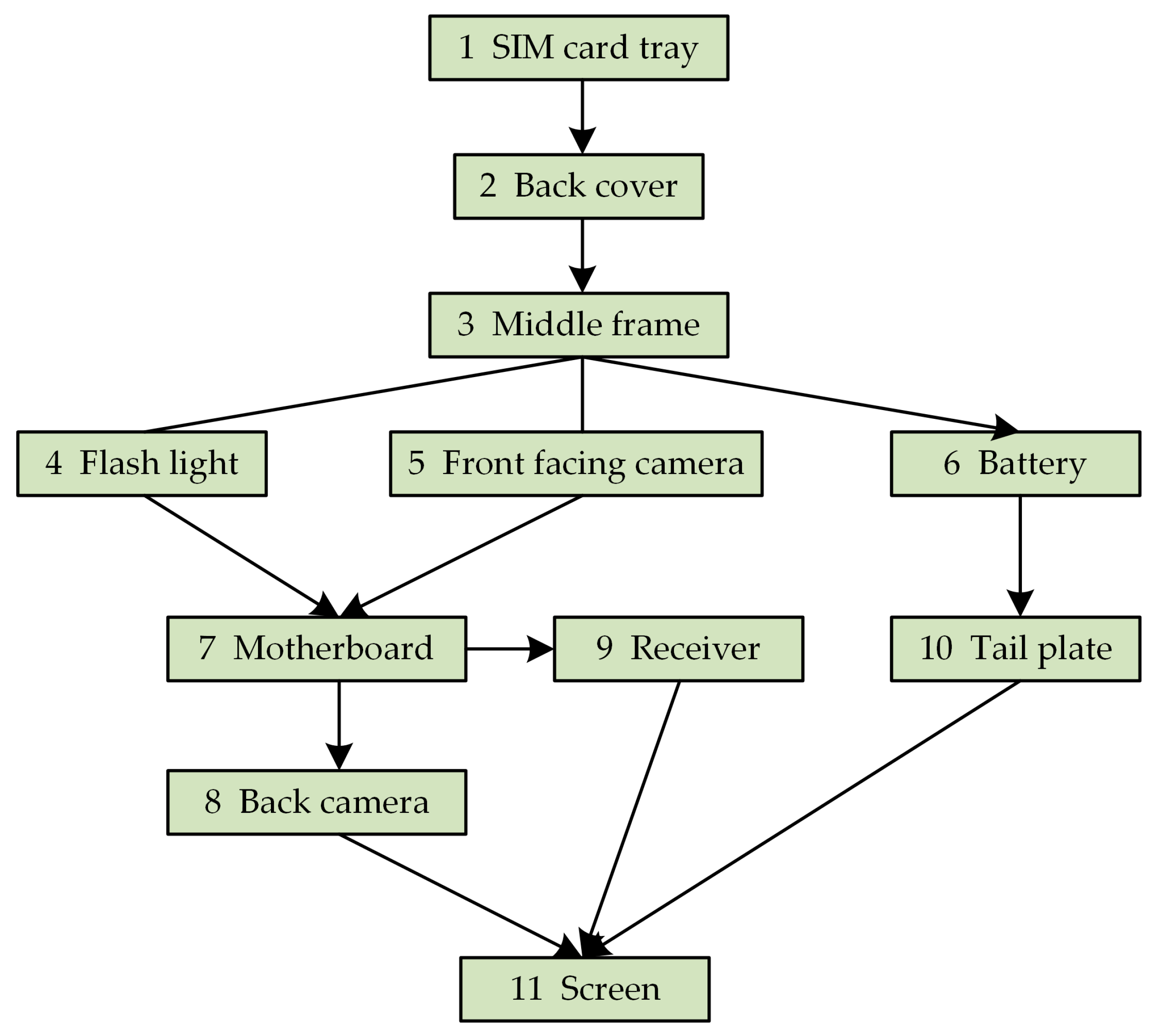
In the first step, the feasible disassembly depth of the EoL smartphones is determined based on the precedence graph and disassembly rules. The second step is to establish a reasonable disassembly process. In the third step, a multi-objective function is established based on the disassembly profit per unit time, the disassembly energy consumption per unit time and the overall safety rate of the disassembly process. In the fourth step, the ITLBO algorithm is proposed to optimize the disassembly depth. The fifth step assesses the disassembly depth in the pareto solution set using fuzzy AHP.
3.3. Establishment of Objective Function
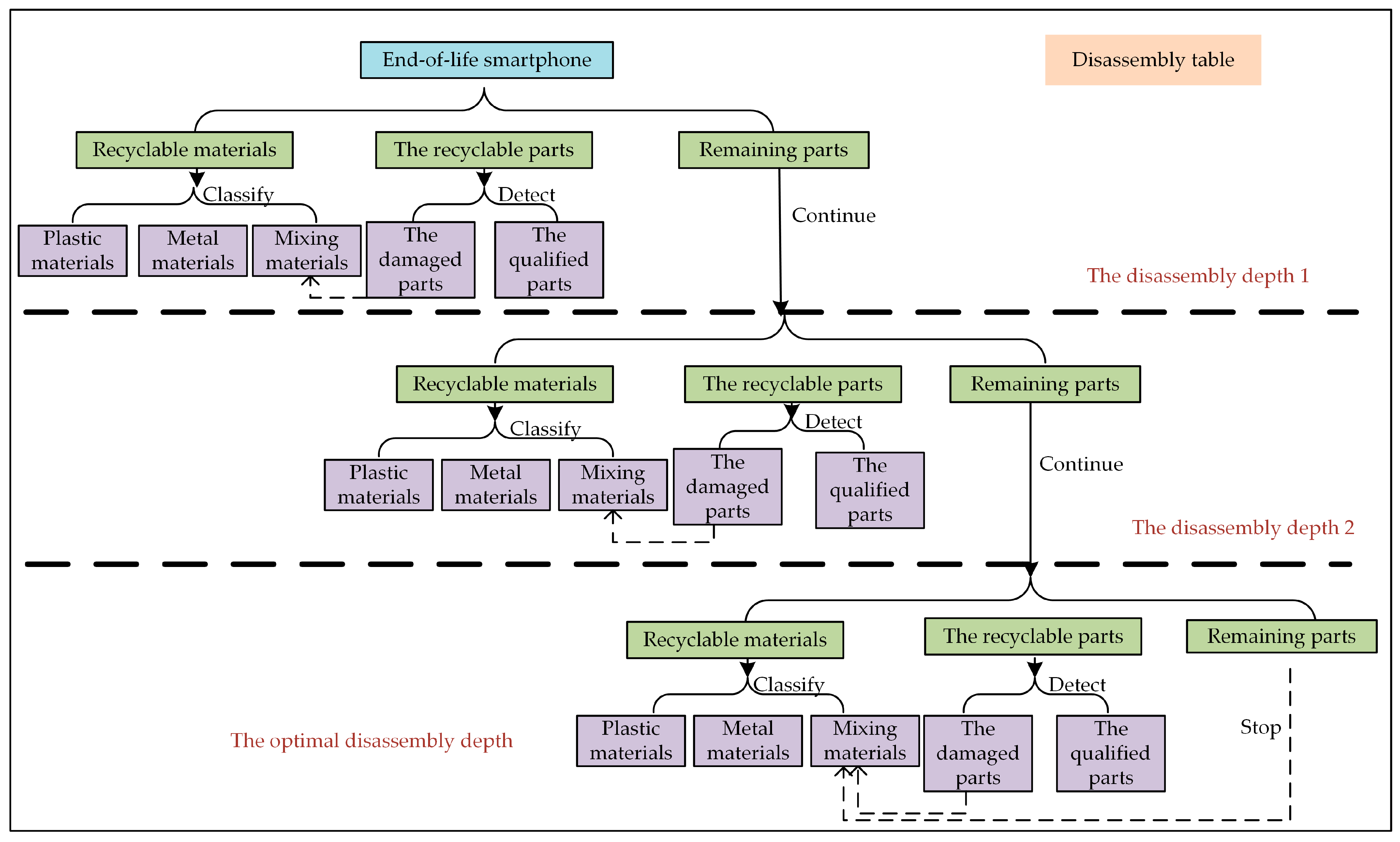
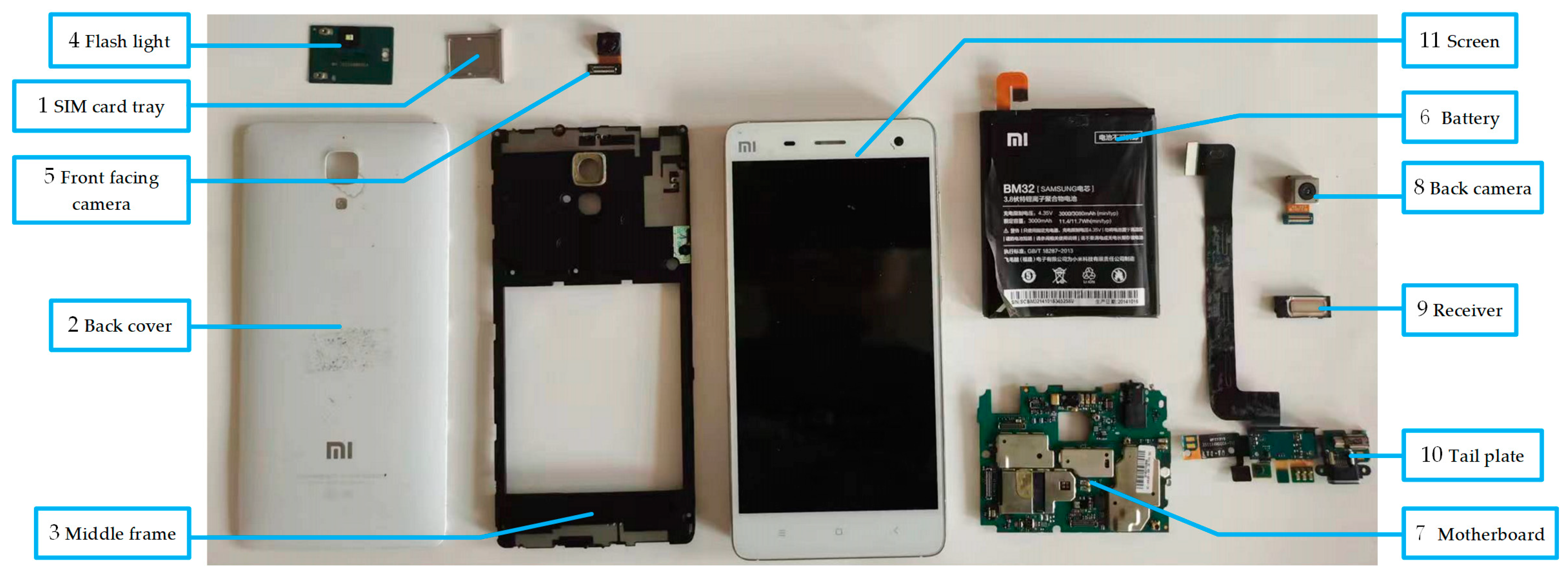
The main factors influencing the disassembly depth are environmental impact and economic benefits. As one of the most prevalent electronic devices, the overall disassembly safety process is also a key factor in EoL smartphones. Therefore, the disassembly profit per unit time, the disassembly energy consumption per unit time and the overall safety rate of the disassembly process are selected as the objectives for evaluating the disassembly depth of EoL smartphones. For the convenience of the research, the disassembly process should meet the following assumptions: (1) The research object is an EoL smartphone (the representative of the EoL equipment) in the disassembly table. (2) Only one main part can be disassembled at each time. (3) The disassembly is in an ideal state; the parts are not damaged during the disassembly process. (4) All parts of the EoL smartphone can be recycled.
The disassembly time model for EoL smartphones mainly considers five factors as follows: the basic disassembly time (the time of the necessary disassembly action), the tool changing time, the tool positioning time, the detection time and the tidying time.
The tool changing time for disassembling part
i (
ui) is determined as follows:
where
v is the time required to change the disassembly tool once and
Ni is the number of changing tools when part
i is disassembled.
The tool positioning time for disassembling part
i (
hi) is determined as follows:
where
zi is the constraint number for part
I and
m is the tool positioning time for removing a constraint.
The total disassembly time for disassembling an EoL smartphone (
T) is determined as follows:
where
fi is the basic disassembly time for part
i,
C is the tidying time for disassembling a part,
J is the detection time for a part and
n is the number of EoL smartphone parts.
The disassembly profit is affected by the disassembly benefit and the disassembly cost. The disassembly benefit mainly considers the benefits of recyclable materials and recyclable parts. The disassembly cost mainly considers the following factors: the procurement cost, the employee cost, the workshop rental cost, the electricity cost and the tool damaging cost.
The disassembly benefit of the recyclable parts of an EoL smartphone (
B1) is determined as follows:
where
ri is the price of recyclable part
i and
p is the quality rate of recyclable parts.
The disassembly benefit of recyclable materials in an EoL smartphone (
B2) is determined as follows:
where
Z1 is the weight of the plastic materials,
Z2 is the weight of the metal materials,
Z3 is the weight of the mixing materials,
D1 is the unit price for the plastic materials,
D2 is the unit price for the metal materials and
D3 is the unit price for the mixing materials.
The employee cost of disassembling an EoL smartphone (
C2) is determined as follows:
where
k1 is the employee cost for an hour.
The workshop rental cost for disassembling an EoL smartphone (
C3) is determined as follows:
where
k2 is the workshop rental cost for a month,
a is the number of disassembly tables in a workshop,
d is the number of working days in a month and
h is the daily working time.
The electricity cost of disassembling an EoL smartphone (
C4) is determined as follows:
where
P1 is the power of the hot air gun,
P2 is the power of the electric screwdriver,
P3 is the power of the detector,
P4 is the power of the lamp,
t1 is the working time of the hot air gun,
t2 is the working time of the electric screwdriver,
t3 is the working time of the detector,
t4 is the working time of the lamp and
c is the price per kilowatt-hour of electricity. The units for
P1,
P2,
P3 and
P4 is watt.
The tool damaging cost of disassembling an EoL smartphone (
C5) is determined as follows:
where
q is the number of tools,
ul is the time spent using the tool
l and
gl is the tool damage cost of using tool
l once.
The total profit of disassembling an EoL smartphone (
L) is determined as follows:
where
C1 is the procurement cost.
The disassembly profit per unit time of disassembling an EoL smartphone (
L1) is determined as follow:
Through the actual disassembly experiment and by analyzing the disassembly of EoL smartphones, we think that disassembly energy consumption mainly comes from the following five aspects: using the suction cups, moving tools and parts, disassembling the board to board (BTB) connectors, disassembling the buckle and using the electric equipment. Therefore, the disassembly energy consumption model is constructed based on the following aspects: energy consumption when using the suction cups, energy consumption by moving tools and parts, energy consumption when disassembling the BTB connectors, energy consumption for disassembling the buckle, and energy consumption when using the electric equipment.
The suction cup is only used to remove the back cover. The energy consumed when using the suction cups (
M1) is determined as follows:
where
F1 is the traction generated using the suction cup and
H1 is the distance of moving the suction cup. The unit of measurement of
F1 is Newton.
The energy consumed by moving tools and parts (
M2) is determined as follows:
where
F2k is the force of moving tools and parts
k,
H2k is the distance of moving tools and parts
k,
m2 is the number of tools and parts and
m2 is the sum of the number of tools (
q) and the number of parts (
n). The unit of measurement of
F2k is Newton.
The energy consumption during disassembling of the BTB connectors (
M3) is determined as follows:
where
m3 is the number of BTB connectors,
Ec is the elastic modulus,
H3e is the connection position width of the BTB connector
e,
t1e is the connection position thickness of the BTB connector
e,
H4e is the height of the BTB connector
e and
H5e is the length of the connector
e.
The energy consumption during disassembling of the buckle (
M4) is determined as follows:
where
m4 is the number of buckle
f,
F6f is the force of disassembling buckle
f and
H6f is the distance of disassembling buckle
f. The unit of measurement of
F6f is Newton.
The energy consumption when using the electric equipment (
M5) is determined as follows:
The total disassembly energy consumption when disassembling an EoL smartphone (
M) is determined as follows:
The disassembly energy consumption per unit time of disassembling an EoL smartphone (
M6) is determined as follows:
By analyzing the disassembly process of EoL smartphones, we found that the temperature of the disassembly environment, the accuracy of the tool positioning, the heat dissipation performance of the disassembly tool and the risky degree of parts are the main factors influencing the disassembly safety of each part. Therefore, the model for the overall safety of the disassembly process for disassembling an EoL smartphone is constructed considering the above four factors. Four factors influencing disassembly are defined as follows: (1) The disassembly process is considered risky when the temperature of the disassembly environment is higher than 60 °C. (2) The disassembly process is considered risky when the positioning of the tool is biased. (3) The disassembly process is considered risky when the temperature of the disassembly tool is higher than 55 °C. (4) The disassembly process is considered risky when the operator is injured by the parts. The rate of risk of disassembling each part is determined using the disassembly experiment. Three operators with a similar disassembly experience are divided into three groups. The operator of every group disassembles the same part and repeats this W times. The number of risky disassembly experiments in every group is recorded.
The rate of risk of disassembling part
i (
Ai) is determined as follows:
where
w1i is the risky number of disassembling part
i in the first disassembly experiment group,
w2i is the risky number of disassembling part
i in the second disassembly experiment group and
w3i is the risky number of disassembling part
i in the third disassembly experiment group.
The overall safety rate of the disassembly process when disassembling an EoL smartphone (
O) is determined as follows:
where
m5 is the number of disassembling parts at each disassembly depth.
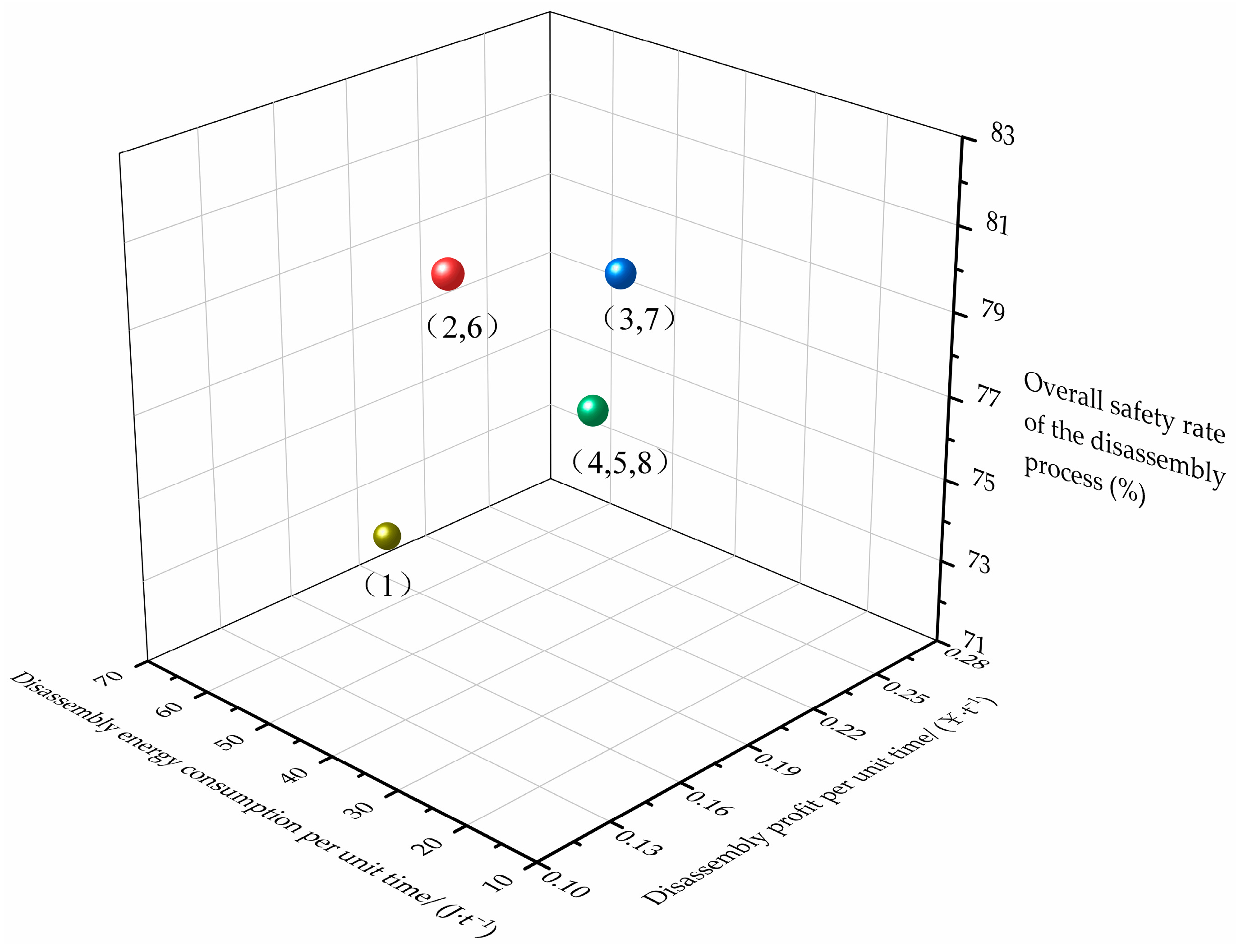
The disassembly profit per unit time, the disassembly energy consumption per unit time and the overall safety rate of the disassembly process are selected as the optimization objectives. The objective function (
f(
x)) is constructed as follows:
3.5. The Assessment of Disassembly Depth
It is difficult to compare the advantages and disadvantages of the pareto solution in the solution set. For the disassembly problem, we should select the optimal disassembly depth. Fuzzy AHP is widely applied to address the uncertainty of decision-making and has been applied in many fields. Fuzzy AHP has obvious advantages in computational time, simplicity and stability. Therefore, fuzzy AHP is selected for assessment of the disassembly depth.
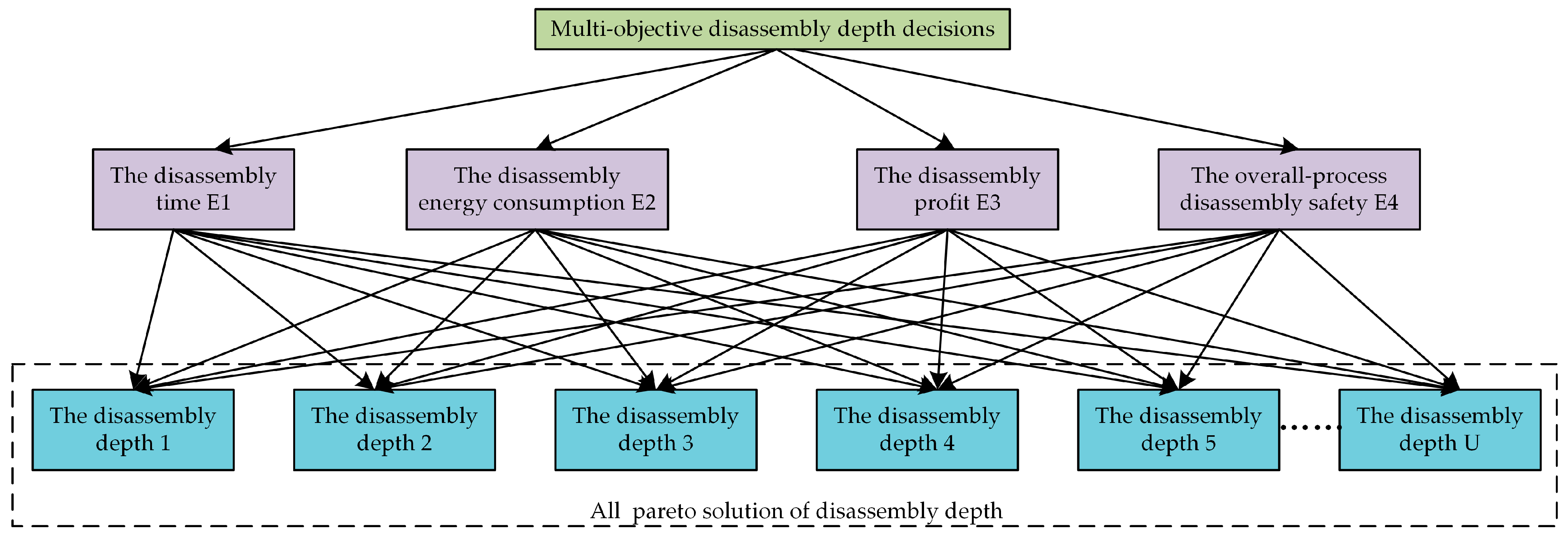
During the actual disassembling process, the disassembly time and the disassembly profit are considered to be the most important factors. The disassembly energy consumption is concerned with environmental protection issues. Moreover, the overall disassembly safety process should also be taken seriously. Therefore, disassembly time, disassembly energy consumption, disassembly profit and the overall safety of the disassembly process are selected as the criteria. The structural hierarchy of multi-objective disassembly depth decisions for EoL smartphones is shown in
Figure 6. The fuzzy judgment matrix
Q of the standard layers can be obtained as shown in Equation (26).
The elements of the fuzzy judgment matrix Q are determined based on the scale of the fuzzy AHP value. The 0.1–0.9 nine-level scale method is the maximum number of grades that people can accept. Thus, the 0.1–0.9 nine-level scale method is applied to the scale of the fuzzy AHP value. The weights of the criteria are determined based on the fuzzy judgment matrix Q and the specific steps are as follows.
Firstly, the fuzzy judgment matrix
Q is summed by rows; the formula for its calculation is:
where
Qy is the sum of row
y of the fuzzy judgment matrix
Q and
m6 is the number of the criterion.
Then, the weight coefficient is calculated based on the following equation:
where
Xy is the weight coefficient of row
y.
Finally, the determinant of the weight coefficient
ri is determined as follows:
In order to verify whether the obtained weight is reliable, the fuzzy consistent matrix
G is obtained. The specific treatment method is determined as follows:
CI is calculated using the following equation. When
CI < 0.1, it means that the data meets the requirements for fuzzy consistency. The average index for randomly generated weights
R is set to 0.9 [
15].
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}