
Safety Performance Assessment via Virtual Simulation of V2X Warning Triggers to Cyclists with Models Created from Real-World Testing

 ,
,
Abstract
:1. Introduction
1.1. Accident Statistics
1.2. C-ITS Benefit for Safety
1.3. V2X Technology Introduction
1.4. Study Context and Correlation to Project “Safe-Up”
1.5. Contribution to Sustainability
2. Materials and Methods
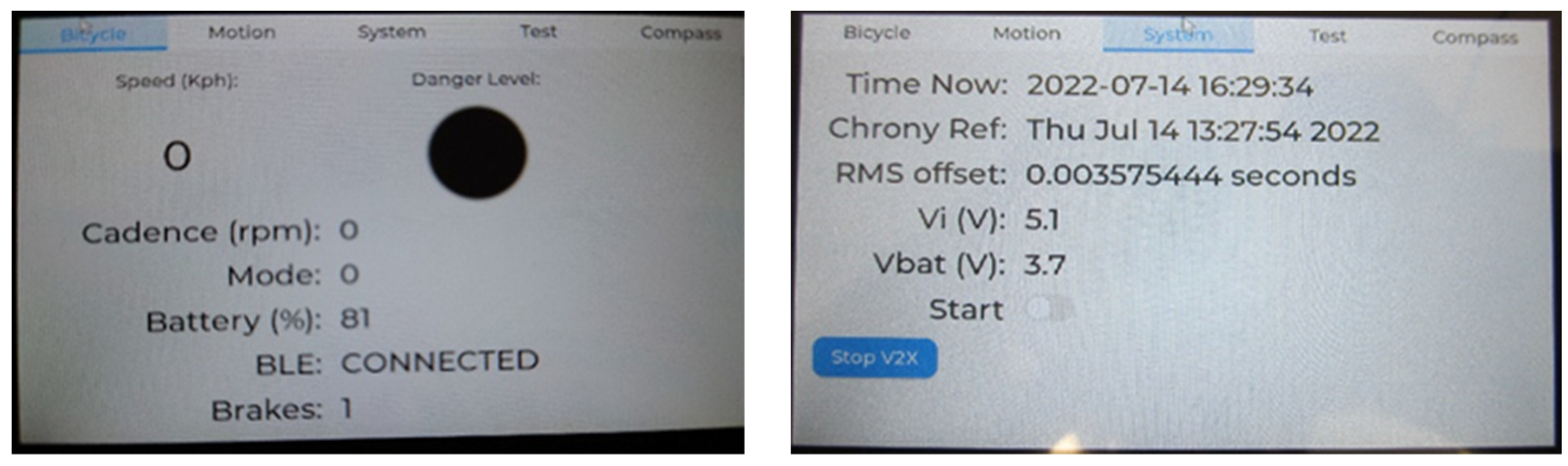
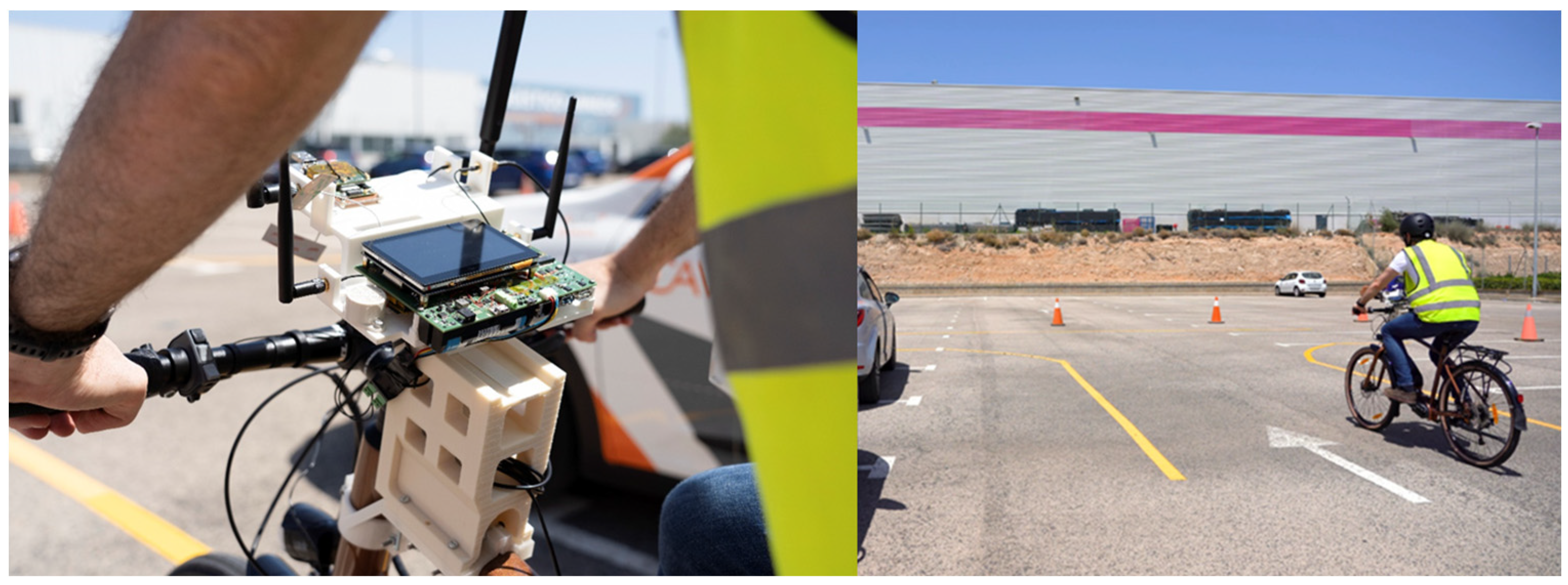
2.1. V2X System Technology and Physical Testing Setup
- Short range communications with V2X ITS-G5;
- Localization via multiband GNSS receiver fused with IMU;
- Real-time monitoring of speed, brake and cadence;
- Basic visual and acoustic interaction with the rider via LCD display and a buzzer respectively.
2.2. Volunteers’ Survey during Physical Testing
- Briefing section: This section was completed by the volunteers before the actual test. It included general questions about the volunteers’ familiarity with the V2X technology and detailed explanations of the testing scenarios tailored to the real testing environment.
- Debriefing section: This section was completed by the volunteers after the completion of the test. It contained questions related to system performance, perceived safety, timing and type of warnings, and other relevant factors.
2.3. Prospective Safety Performance Assessment
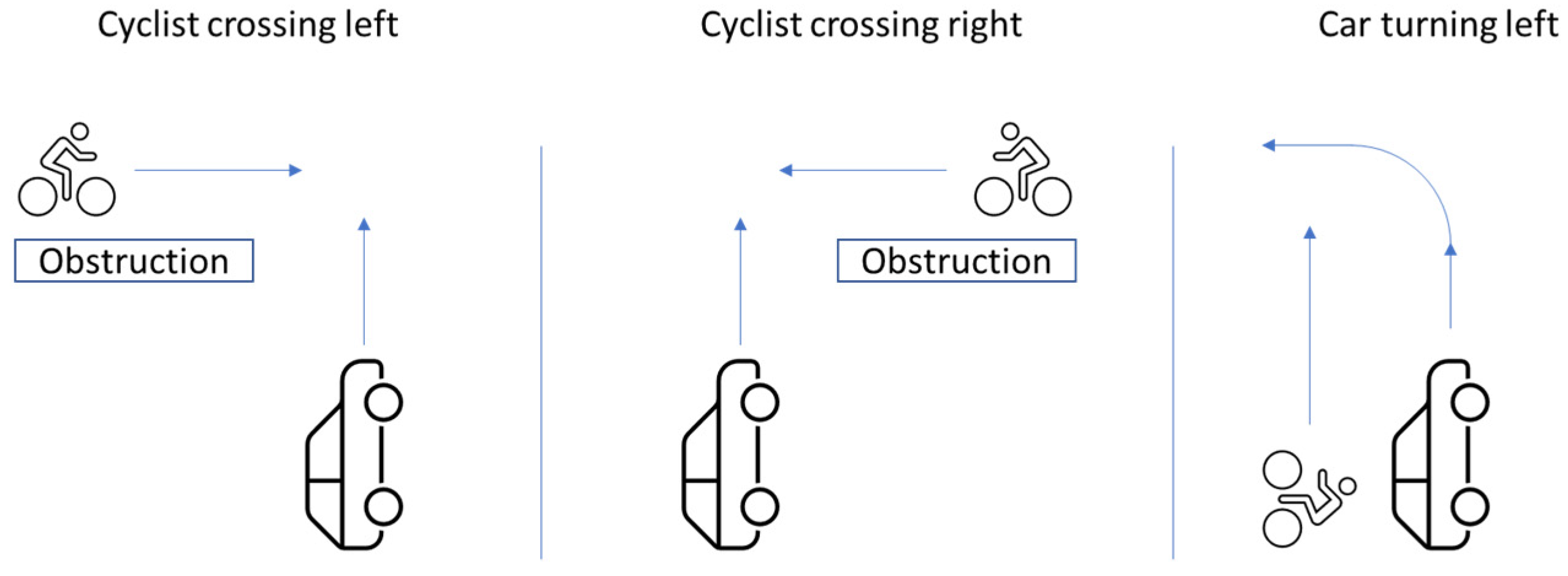
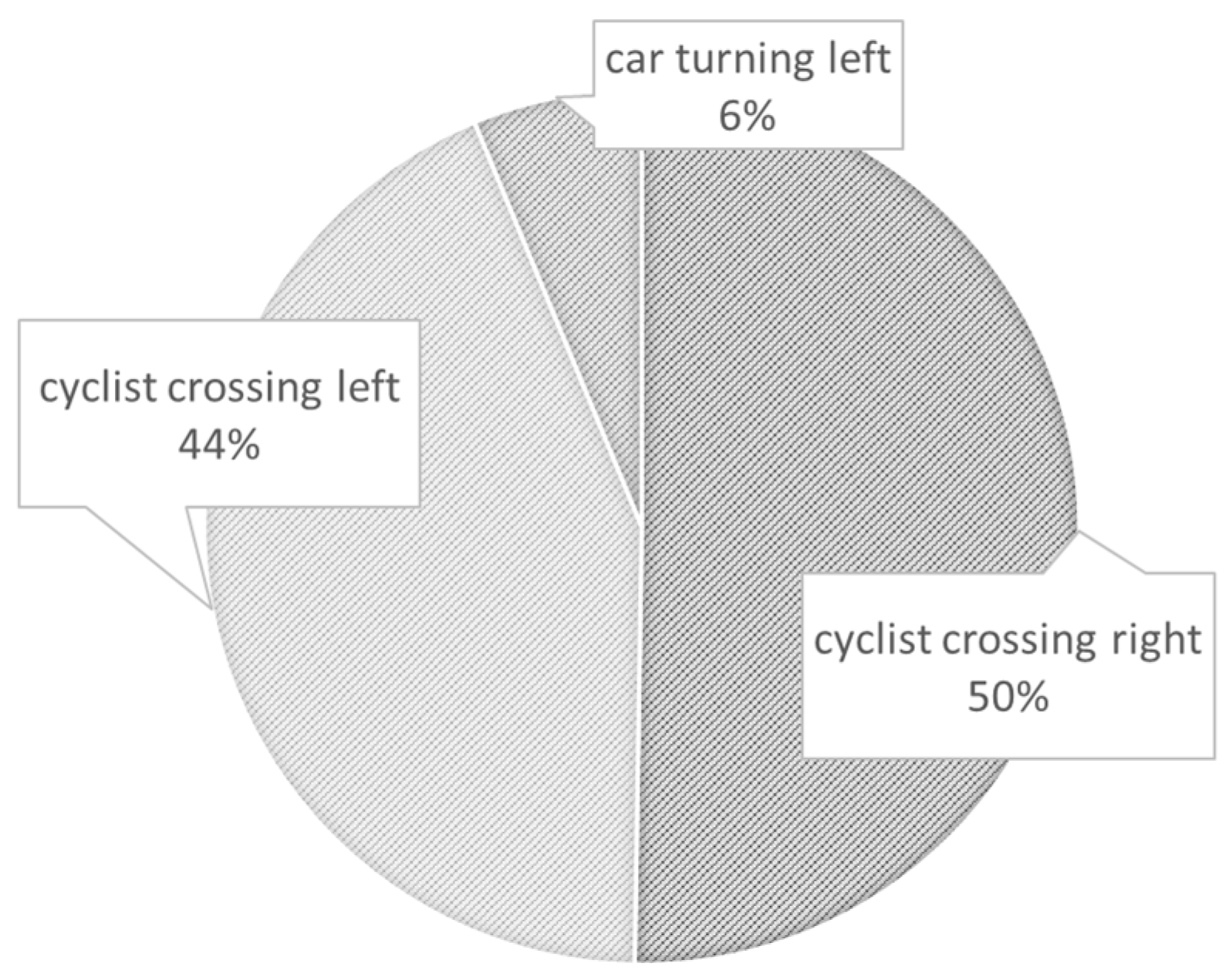
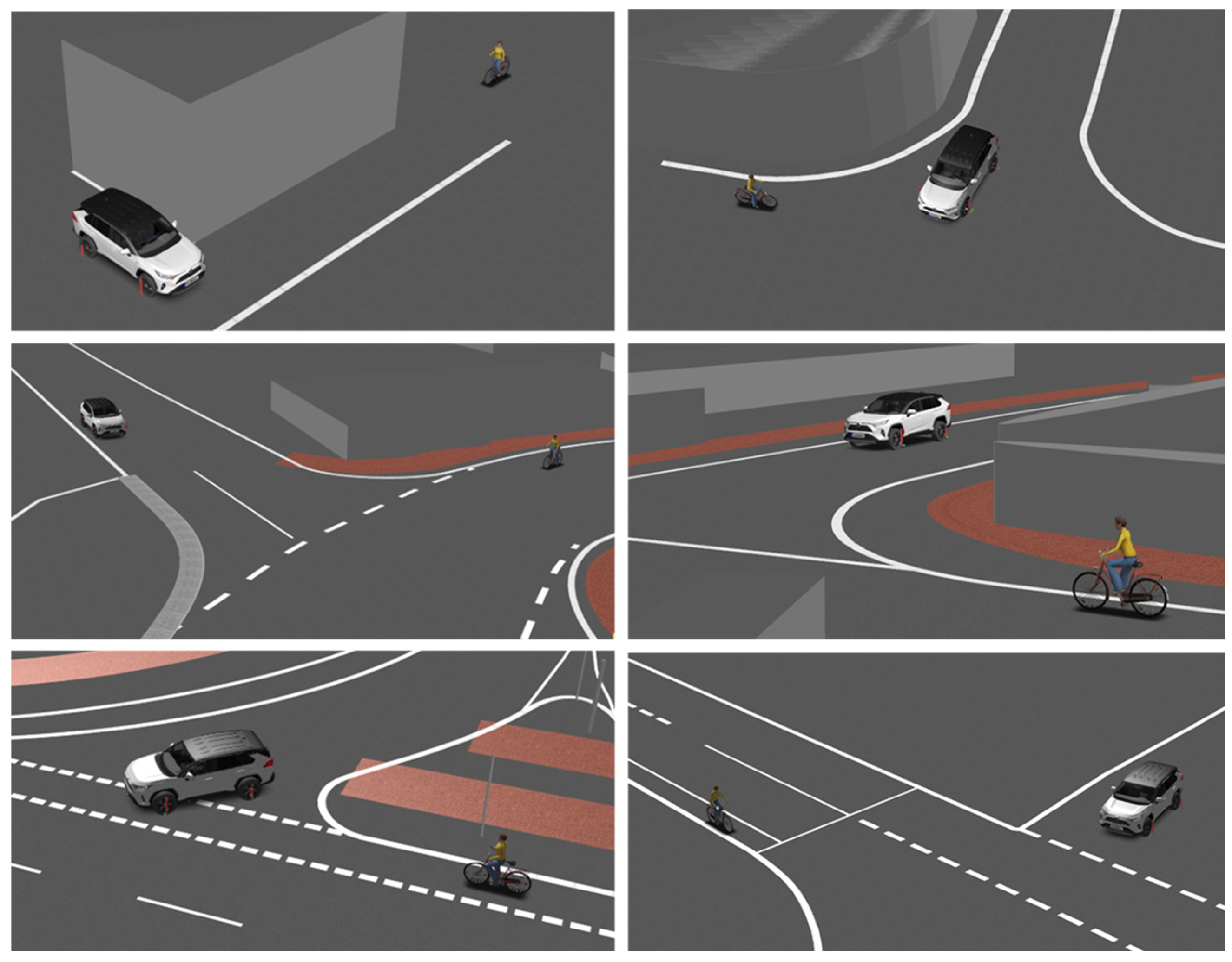
2.4. Evaluation Scope and Research Question
2.5. Baseline Generation
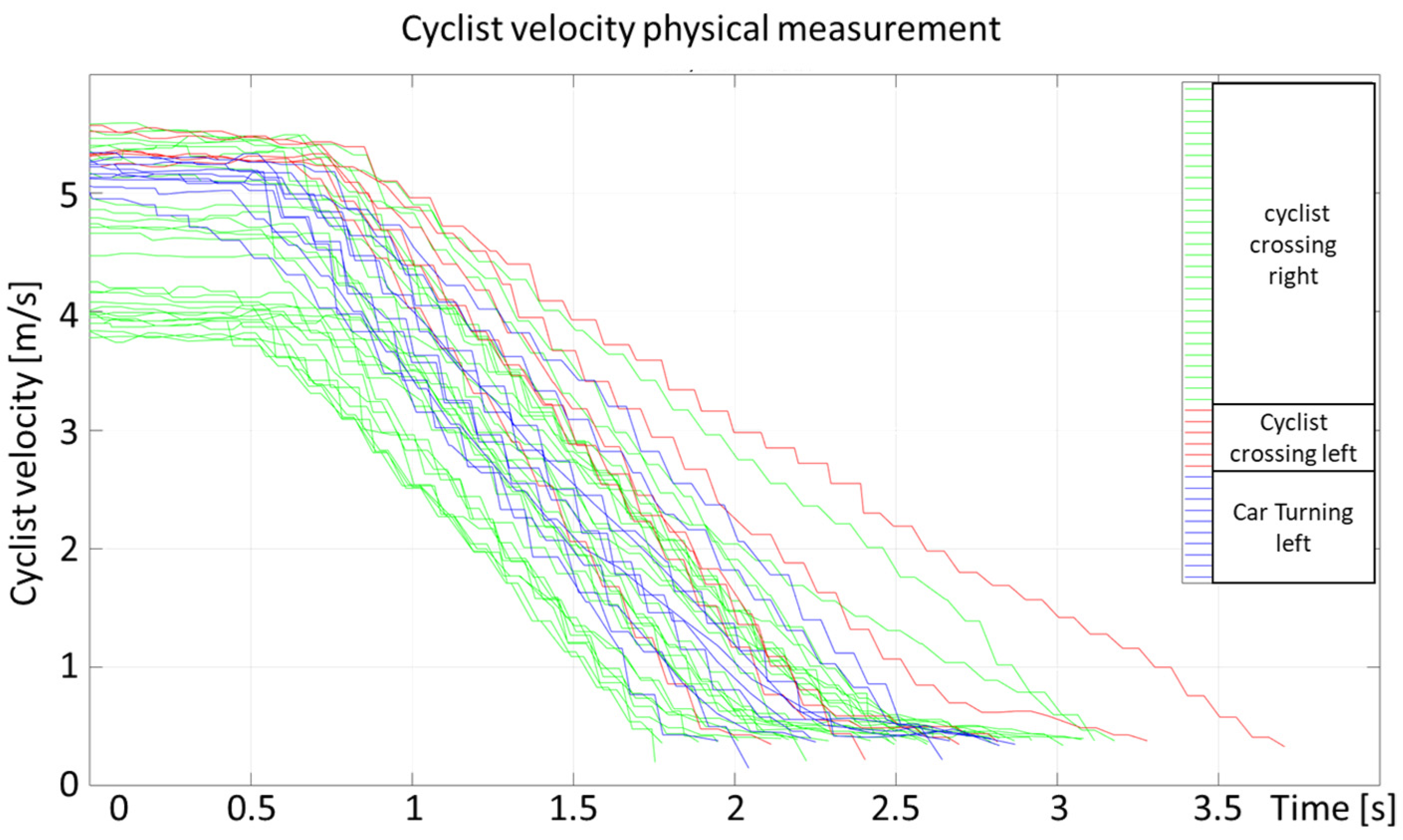
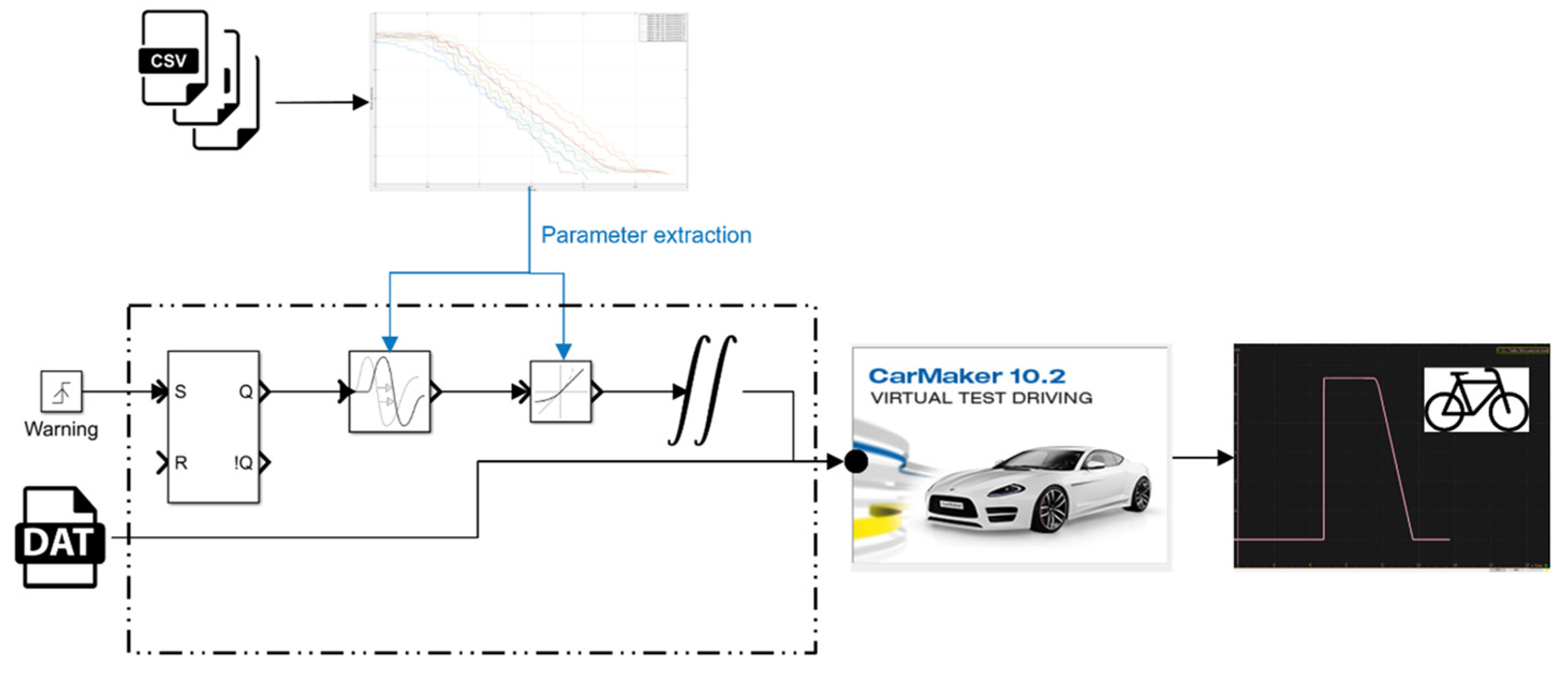
2.6. Cyclist Model Generation
3. Results
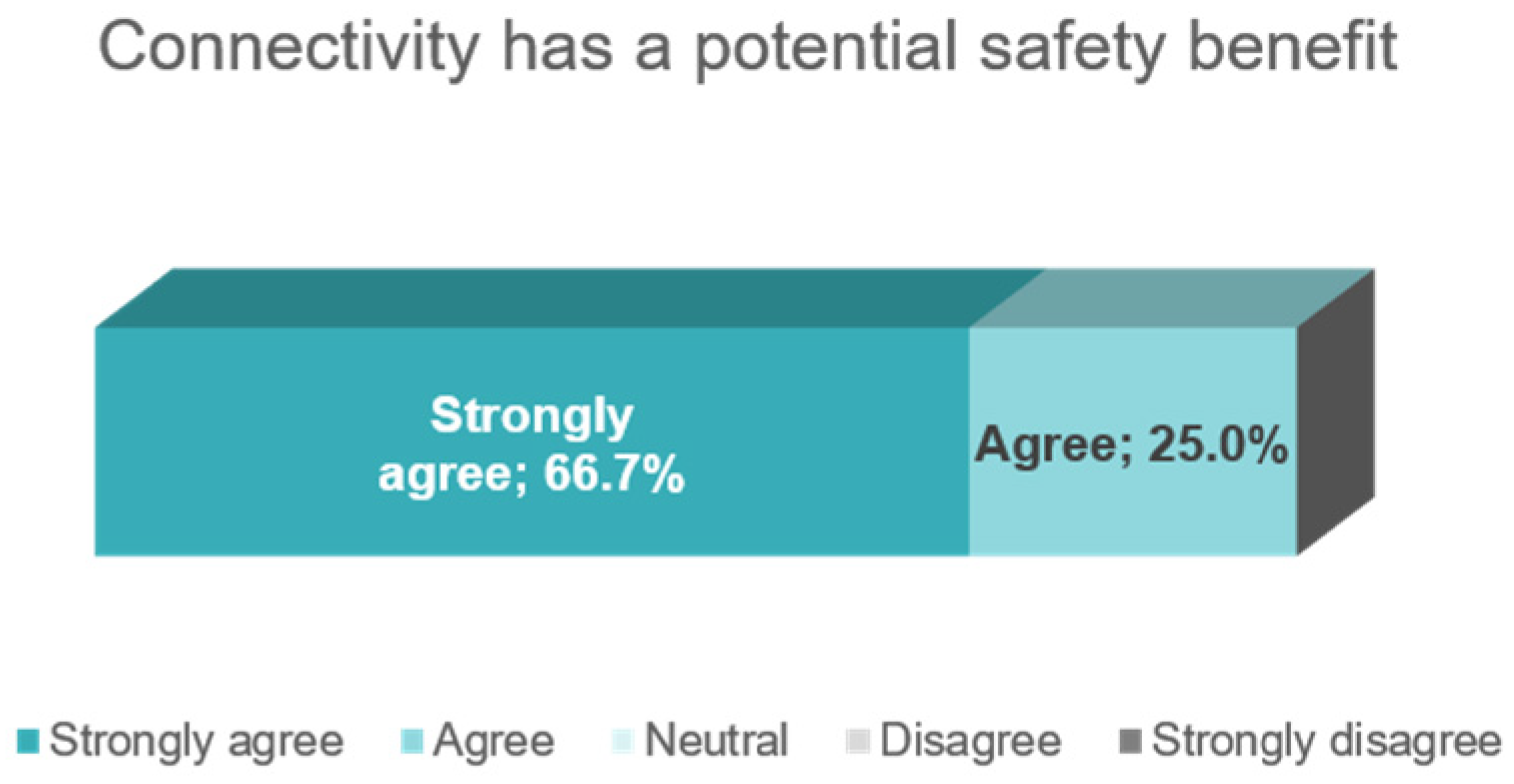
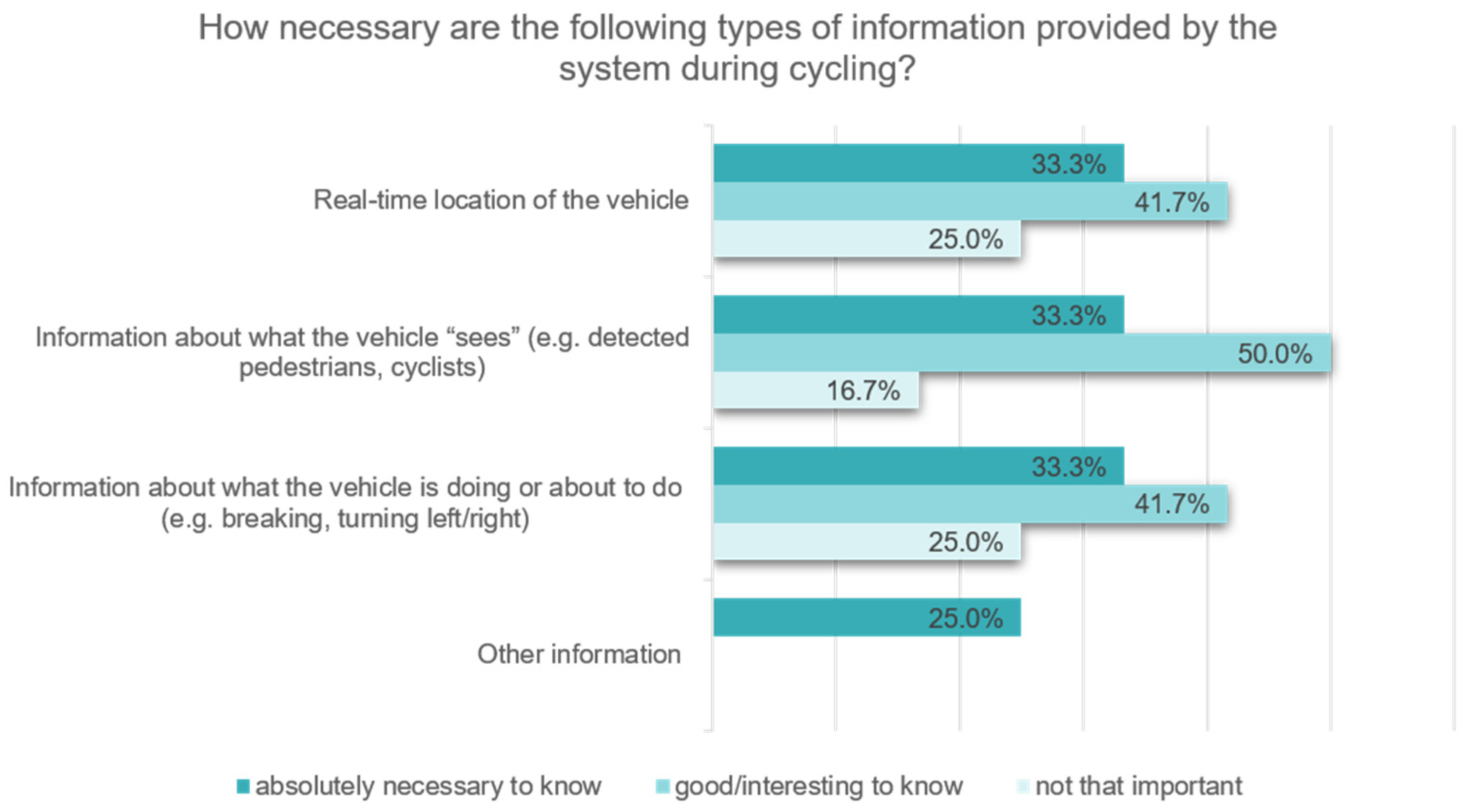
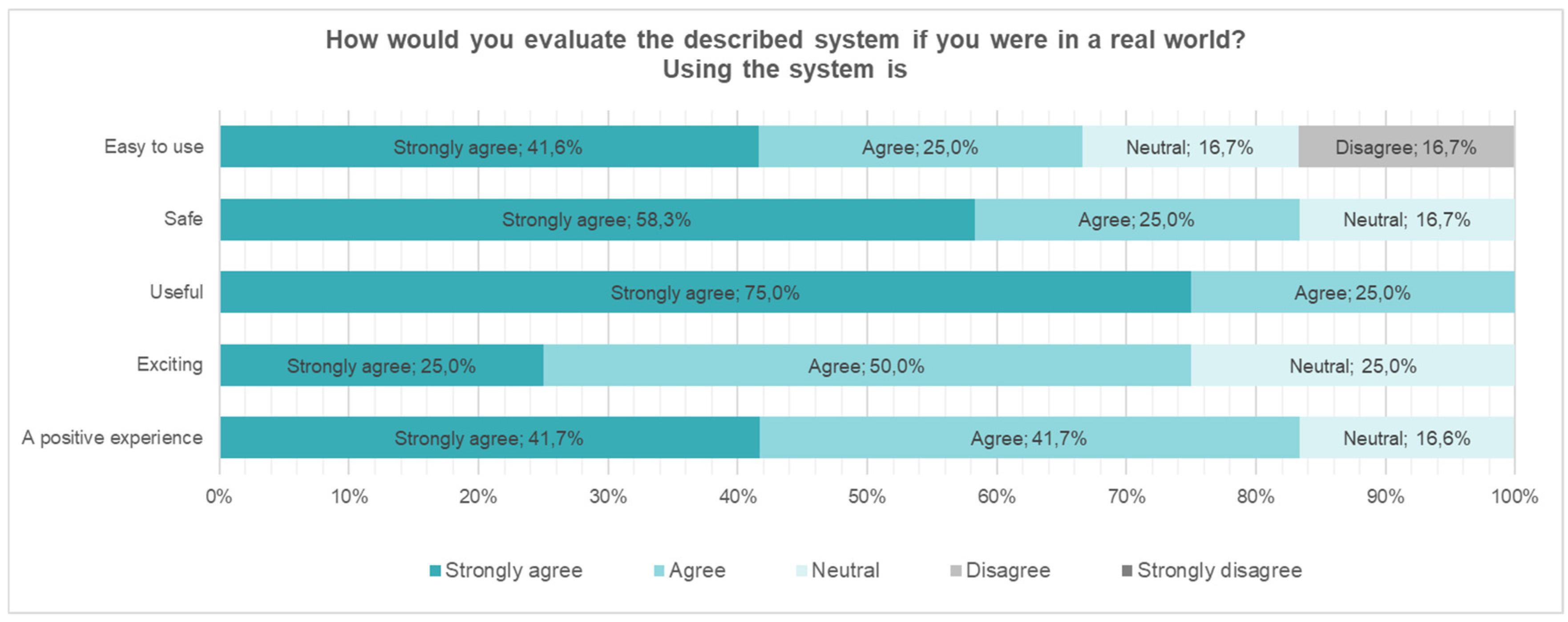
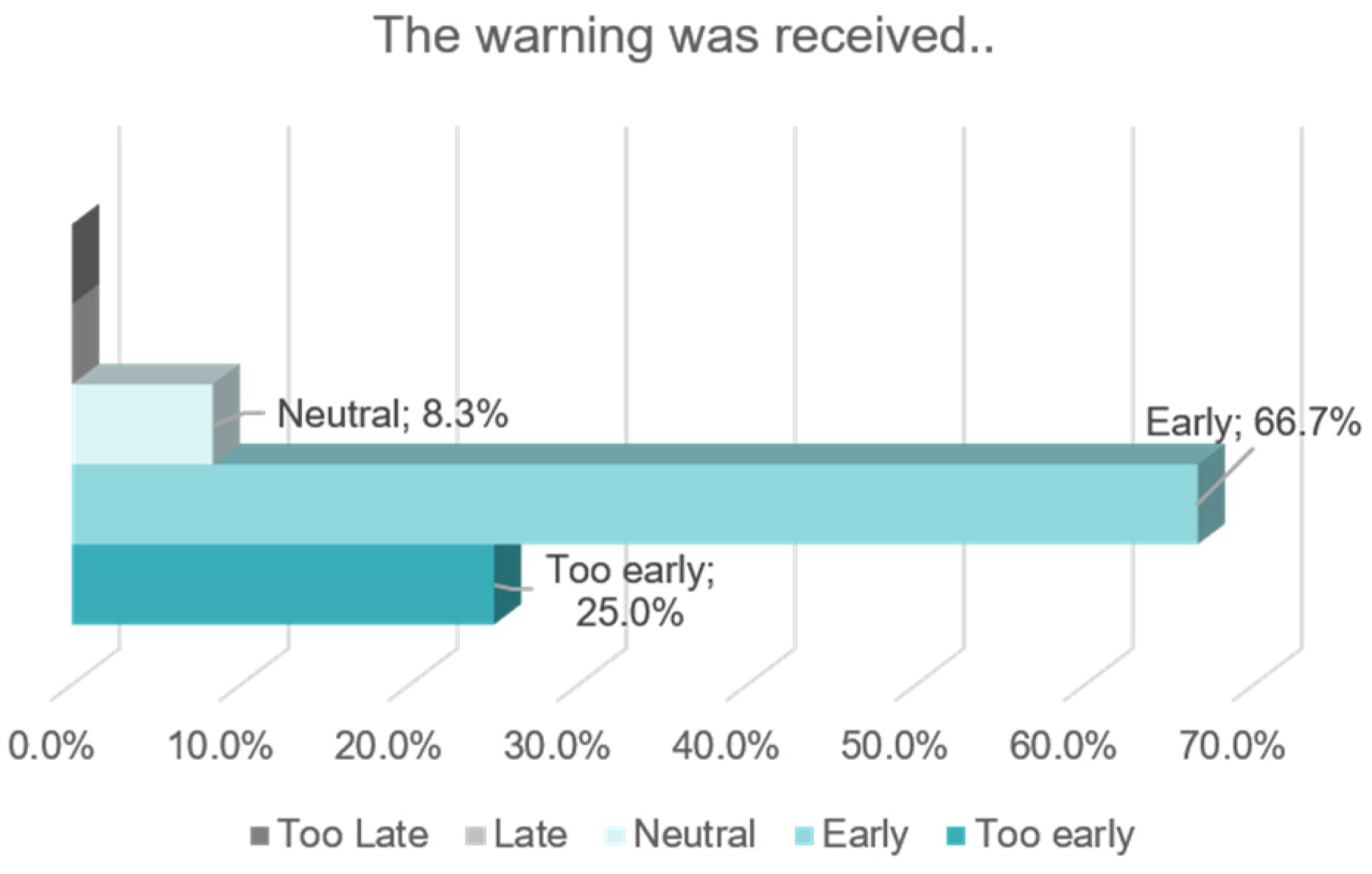
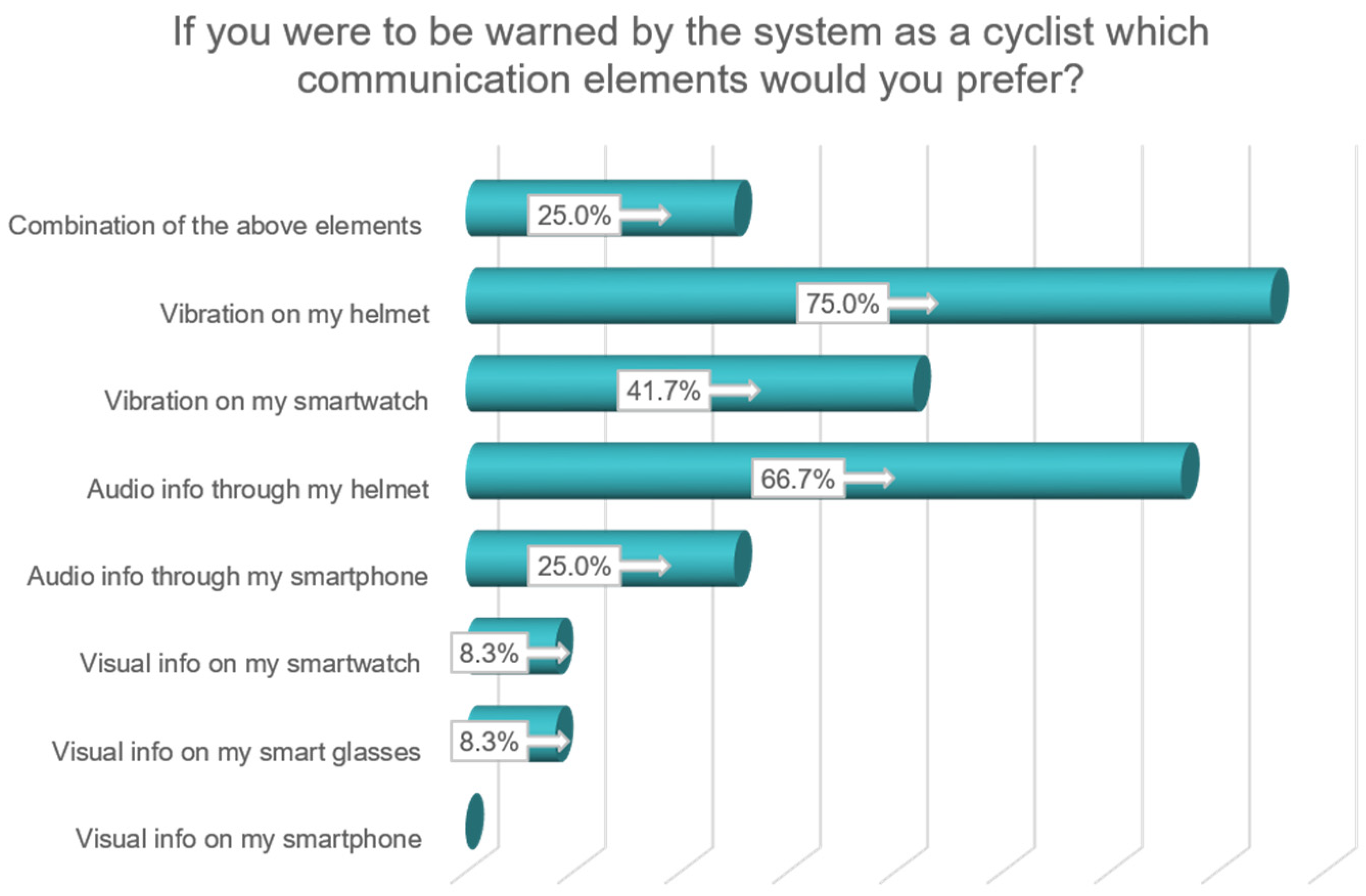
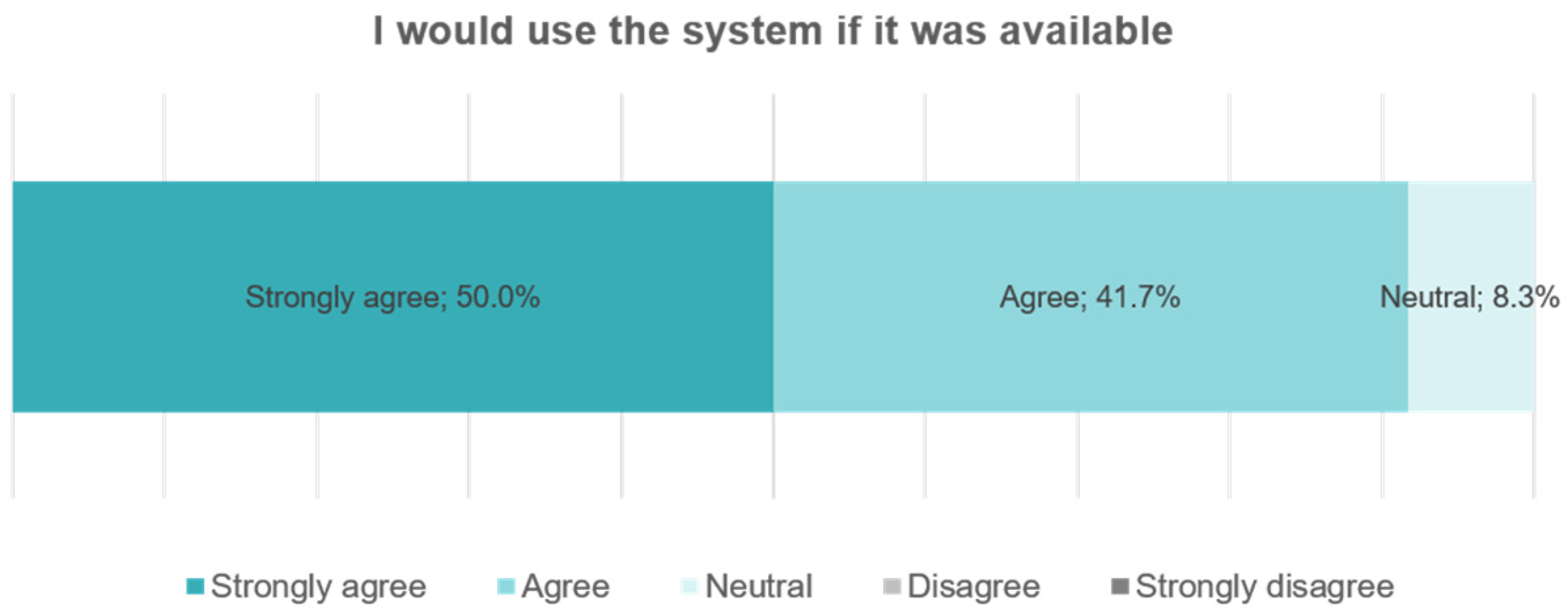
3.1. Volunteers’ Feedback during Physical Testing
3.2. Baseline Simulation Results
3.3. Treatment Simulation Results
- Cases where the cyclist was already in a standstill position from the beginning of the computer simulation and the opponent vehicle did not prevent the crash. In some cases, especially the vehicle turning cases, the vehicle was travelling, but the cyclist not. Naturally, a collision is not avoidable;
- Cases where the cyclist got a warning trigger, but its trajectory was very near the vehicle trajectory. The cyclist stopped on the vehicle trajectory;
- Cases where the trigger to the cyclist came very late, due to vehicle acceleration almost in front of the collision and thus a TTC already below 1 s.
3.4. Safety Performance
4. Discussion
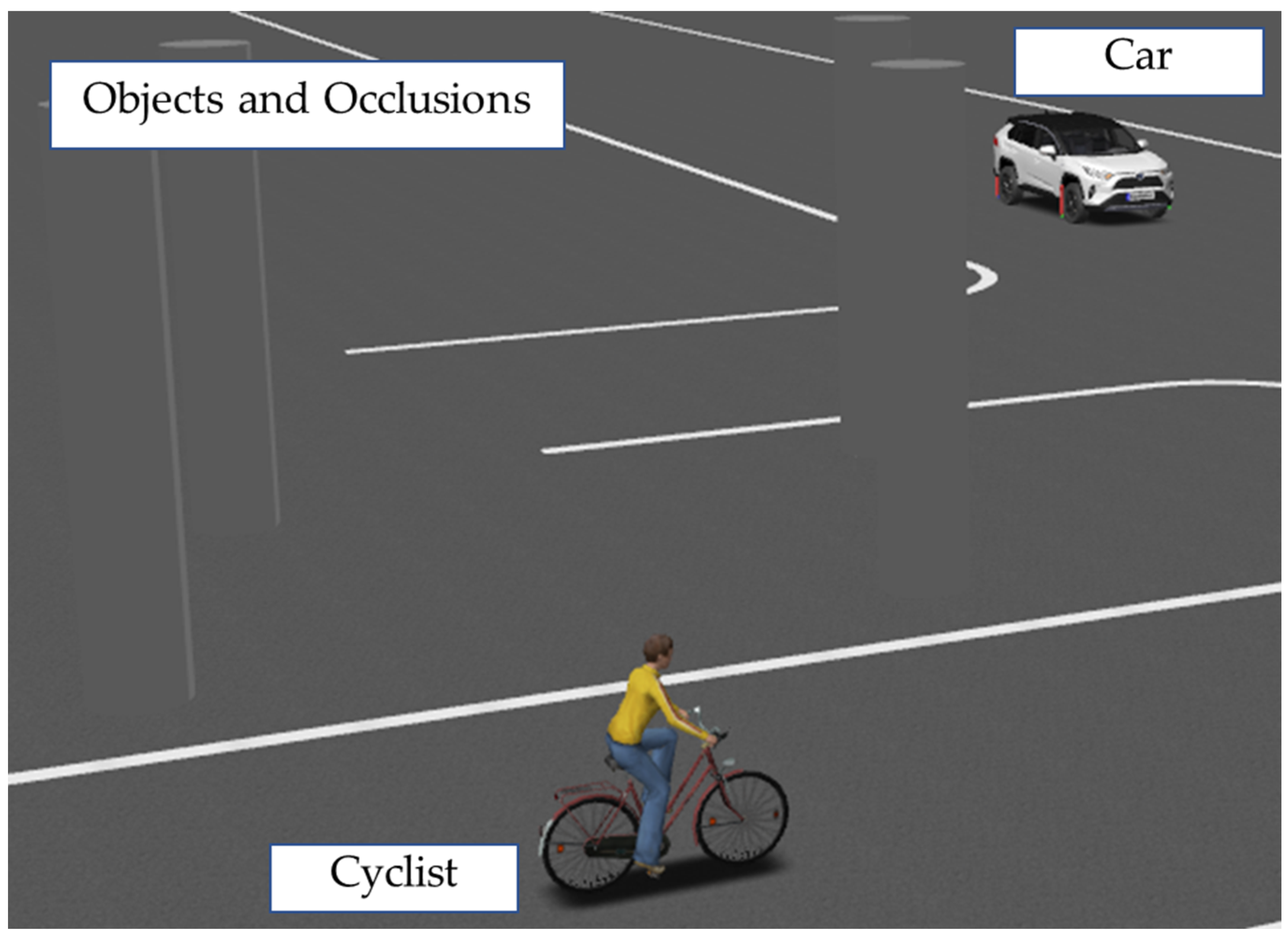
4.1. Virtual Simulation
- See: The used sensor models represent an ideal perception and thus ideal object lists. The world-model knows the position of all objects in the scene;
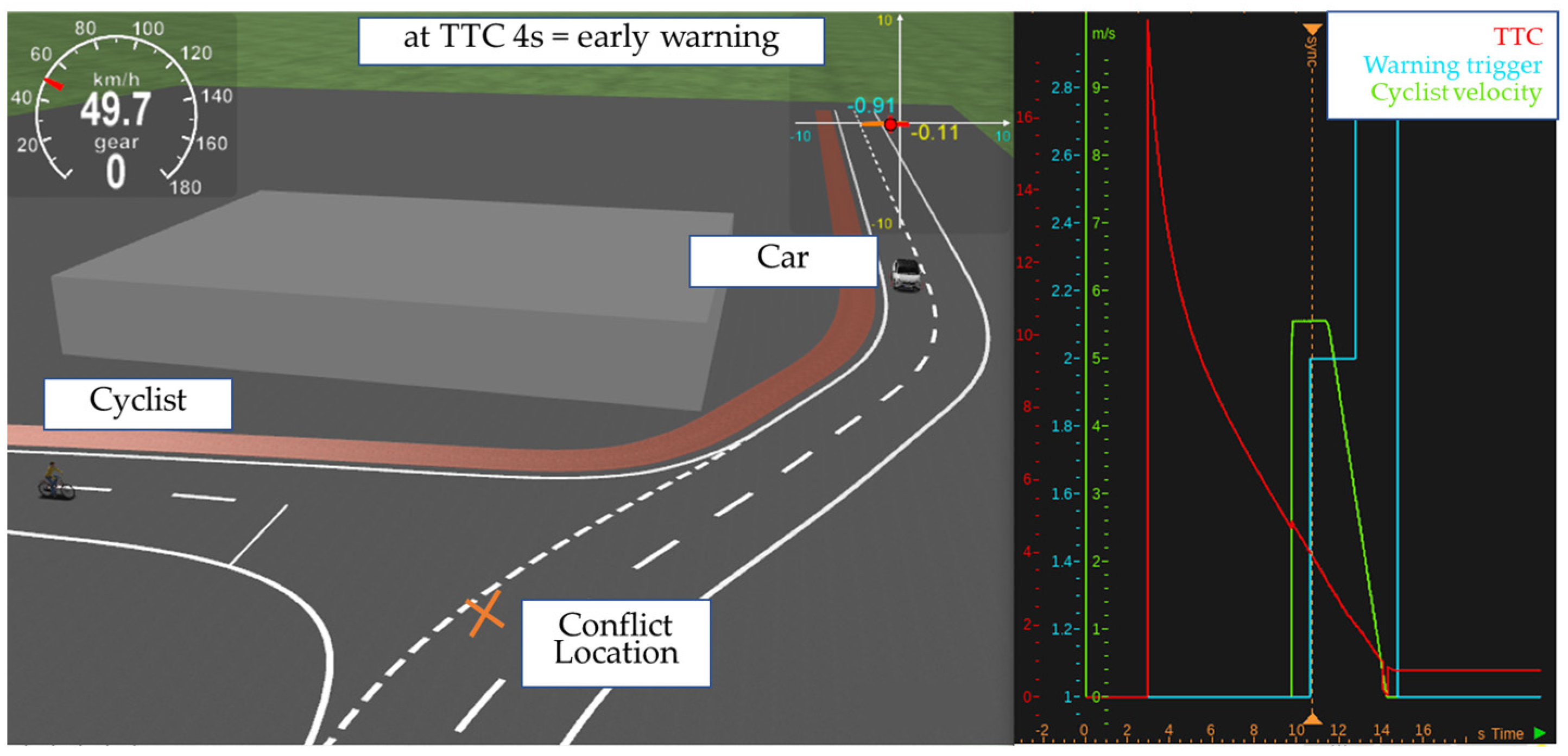
- Think: The trajectory prediction and TTC calculation is based on ideal object data. The model itself includes a trajectory-prediction algorithm. The on-time-warning trigger is set to 4 s;
- Act: The vehicle model itself is strictly following the defined trajectory. The cyclist model will always react to this warning trigger with a defined delay and constant deceleration, which are based on the described test data.
4.2. Safety Function and User Experience
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Balint, A.; Labenski, V.; Schories, L.; Huertas Leyva, P.; Ostling, M.; Schmidt, D.; Schindler, R. D2.6 Use Case Definitions and Initial Safety-Critical Scenarios, Safe-Up EU Project. 2022. Available online: https://www.safe-up.eu/s/SAFE-UP_D26_Use-case-definitions-and-initial-safety-critical-scenarios.pdf (accessed on 16 October 2023).
- Olszewski, P.; Szagała, P.; Rabczenko, D.; Zielińska, A. Investigating safety of vulnerable road users in selected EU countries. J. Saf. Res. 2019, 68, 49–57. [Google Scholar] [CrossRef] [PubMed]
- Destatis.de. Persons Involved in Accidents Causing Personal Injury by Type of Traffic Participation. Available online: https://www.destatis.de/EN/Themes/Society-Environment/Traffic-Accidents/Tables/drivers-pedestrians.html (accessed on 12 July 2023).
- Scarano, A.; Riccardi, M.R.; Mauriello, F.; D’Agostino, C.; Pasquino, N.; Montella, A. Injury severity prediction of cyclist crashes using random forests and random parameters logit models. Accid. Anal. Prev. 2023, 192, 107275. [Google Scholar] [CrossRef] [PubMed]
- European Commission. C-ITS Platform Phase II: Final Report. 2017. Available online: https://transport.ec.europa.eu/system/files/2017-09/2017-09-c-its-platform-final-report.pdf (accessed on 23 October 2023).
- European Commission. EU Road Safety Policy Framework 2021–2030—Next Steps towards ‘Vision Zero’; Publications Office of the European Union: Luxembourg, 2020. [Google Scholar]
- European Commission. Road Safety: New Rules Clear Way for Clean, Connected and Automated Mobility on EU Roads. 2021. Available online: https://ec.europa.eu/commission/presscorner/detail/en/IP_19_1648 (accessed on 23 October 2023).
- Winograd, T.; Auto, Cycling and Tech Innovators Launch Coalition for Cyclist Safety Based on V2X Deployments. Bosch Media Service, Press Release 23 October 2023. Available online: https://www.bosch-presse.de/pressportal/de/en/auto-cycling-and-tech-innovators-launch-coalition-for-cyclist-safety-based-on-v2x-deployments-259136.html (accessed on 4 December 2023).
- Sjoberg, K.; Andres, P.; Buburuzan, T.; Brakemeier, A. Cooperative Intelligent Transport Systems in Europe: Current Deployment Status and Outlook. IEEE Veh. Technol. Mag. 2017, 12, 89–97. [Google Scholar] [CrossRef]
- Lim, K.L.; Whitehead, J.; Jia, D.; Zheng, Z. State of data platforms for connected vehicles and infrastructures. Commun. Transp. Res. 2021, 1, 100013. [Google Scholar] [CrossRef]
- Kapousizis, G.; Ulak, M.B.; Geurs, K.; Havinga, P.J.M. A review of state-of-the-art bicycle technologies affecting cycling safety: Level of smartness and technology readiness. Transp. Rev. 2023, 43, 430–452. [Google Scholar] [CrossRef]
- Nourbakhshrezaei, A.; Jadidi, M.; Sohn, G. Improving Cyclists’ Safety Using Intelligent Situational Awareness System. Sustainability 2023, 15, 2866. [Google Scholar] [CrossRef]
- Scholliers, J.; van Sambeek, M.; Moerman, K. Integration of vulnerable road users in cooperative ITS systems. Eur. Transp. Res. Rev. 2017, 9, 15. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G.; Severino, A. V2X Communications Applied to Safety of Pedestrians and Vehicles. J. Sens. Actuator Netw. 2020, 9, 3. [Google Scholar] [CrossRef]
- Zoghlami, C.; Kacimi, R.; Dhaou, R. 5G-enabled V2X Communications for Vulnerable Road Users Safety Applications: A Review. Wirel. Netw. 2022, 29, 1237–1267. [Google Scholar] [CrossRef]
- Nikolaou, S.; Castells, J.; Lorente Mallada, J.; Gragkopoulos, I.; Tsetsinas, I. D3.7 Demo 4 System for On-Time Warning Provisions to VRUs and Drivers in Critical Conditions Update, Safe-Up Eu Project. 2022. Available online: https://www.safe-up.eu/s/SAFE-UP_D37_-Demo-4-system-for-on-time-warning-provisions-to-VRUs-and-drivers-in-critical-conditions.pdf (accessed on 30 November 2023).
- United Nations. General Assembly Resolution A/RES/70/1. Transforming Our World, the 2030 Agenda for Sustainable Development. 2015. Available online: https://documents-dds-ny.un.org/doc/UNDOC/GEN/N15/291/89/PDF/N1529189.pdf?OpenElement (accessed on 5 December 2023).
- ETSI (European Telecommunications Standards Institute). Intelligent Transport Systems (ITS); V2X Applications; Part 1: Road Hazard Signalling (RHS) Application Requirements Specification. 2013. ETSI TS 101 539-1 (V1.1.1). Sophia Antipolis Cedex—France. Available online: https://www.etsi.org/deliver/etsi_ts/101500_101599/10153901/01.01.01_60/ts_10153901v010101p.pdf (accessed on 5 December 2023).
- ETSI (European Telecommunications Standards Institute). Intelligent Transport Systems (ITS); V2X Applications; Part 2: Intersection Collision Risk Warning (ICRW) Application Requirements Specification. 2018. ETSI TS 101 539-2 (V1.1.1). Sophia Antipolis Cedex—France. Available online: https://www.etsi.org/deliver/etsi_ts/101500_101599/10153902/01.01.01_60/ts_10153902v010101p.pdf (accessed on 5 December 2023).
- ETSI (European Telecommunications Standards Institute). Intelligent Transport Systems (ITS); V2X Applications; Part 3: Longitudinal Collision Risk Warning (LCRW) Application Requirements Specification. 2013. ETSI TS 101 539-3 (V1.1.1). Sophia Antipolis Cedex—France. Available online: https://www.etsi.org/deliver/etsi_ts/101500_101599/10153903/01.01.01_60/ts_10153903v010101p.pdf (accessed on 5 December 2023).
- Assessment Protocol—Vulnerable Road User Protection, Euro NCAP, v.10.0.5, December 2021. Available online: https://cdn.euroncap.com/media/67553/euro-ncap-assessment-protocol-vru-v1005.pdf (accessed on 4 December 2023).
- Symeonidis, I.; Dimokas, N.; Gragopoulos, I.; Tsetsinas, I.; Chrysochoou, E.; Touliou, K.; Valenti, G.; Biral, F.; Gemou, M.; Bekiaris, E. SAFESTRIP: Hardware in the Loop Motorcycle Simulator Experiment for C-ITS applications. In Proceedings of the 13th International Motorcycle Conference of the ifz, Cologne, Germany, 1 September–6 October 2020. [Google Scholar]
- Diederichs, J.P.F.; Fontana, M.; Bencini, M.; Nikolaou, S.; Montanari, R.; Spadoni, A.; Widlroither, H.; Baldanzini, N. New HMI Concept for Motorcycles—The Saferider Approach. In Engineering Psychology and Cognitive Ergonomics, Lecture Notes in Computer Science, Proceedings of the EPCE 2009, San Diego, CA, USA, 19–24 July 2009; Harris, D., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5639, pp. 358–366. [Google Scholar]
- European Commission. Connected and Automated Driving Knowledge Base: FESTA Handbook Version 8. 2023. Available online: https://www.connectedautomateddriving.eu/wp-content/uploads/2021/09/FESTA-Handbook-Version-8.pdf (accessed on 30 November 2023).
- ISO/TR 21934-1:2021; Prospective Safety Performance Assessment of Pre-Crash Technology by Virtual Simulation. ISO (International Organization for Standardization): Vernier, Switzerland, 2021.
- Ma, X.; Luo, D. Modeling cyclist acceleration process for bicycle traffic simulation using naturalistic data. Transp. Res. Part F Traffic Psychol. Behav. 2016, 40, 130–144. [Google Scholar] [CrossRef]
- Fonseca, L. Simulation-based evaluation of a generic autonomous emergency braking system using a cognitive pedestrian behaviour model. In Proceedings of the 27th Enhanced Safety of Vehicles (ESV), Conference, Yokohama, Japan, 3–6 April 2023. [Google Scholar]
- Sewalkar, P.; Seitz, J. Vehicle-to-Pedestrian Communication for Vulnerable Road Users: Survey, Design Considerations, and Challenges. Sensors 2019, 19, 358. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Chang, M.; Gu, G.; Sun, X.; Xu, H.; Wang, W.; Wang, T. Analysis of Risky Driving Behavior of Urban Electric Bicycle Drivers for Improving Safety. Sustainability 2022, 14, 1243. [Google Scholar] [CrossRef]
- Koukounaris, A.I.; Stephanedes, Y.J. Connected Intelligent Transportation System Model to Minimize Societal Cost of Travel in Urban Networks. Sustainability 2023, 15, 15383. [Google Scholar] [CrossRef]
- Feifel, H.; Erdem, B.; Menzel, D.M.; Gee, R. Reducing Fatalities in Road crashes in Japan, Germany, and USA with V2X-enhanced-ADAS. In Proceedings of the 27th Enhanced Safety of Vehicles (ESV), Conference, Yokohama, Japan, 3–6 April 2023. [Google Scholar]
- Kabil, A.; Rabieh, K.; Kaleem, F.; Azer, M.A. Vehicle to Pedestrian Systems: Survey, Challenges and Recent Trends. IEEE Access 2022, 10, 123981–123994. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cyclist Type | Acceleration [m/s2] | Reaction Time [s] |
|---|---|---|
| “progressive” | −3.6 | 0.37 |
| “defensive” | −2.0 | 0.71 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schories, L.; Dahringer, N.; Piram, U.; Raut, A.; Nikolaou, S.; Gragkopoulos, I.; Tsetsinas, I.; Panou, M. Safety Performance Assessment via Virtual Simulation of V2X Warning Triggers to Cyclists with Models Created from Real-World Testing. Sustainability 2024, 16, 610. https://doi.org/10.3390/su16020610
Schories L, Dahringer N, Piram U, Raut A, Nikolaou S, Gragkopoulos I, Tsetsinas I, Panou M. Safety Performance Assessment via Virtual Simulation of V2X Warning Triggers to Cyclists with Models Created from Real-World Testing. Sustainability. 2024; 16(2):610. https://doi.org/10.3390/su16020610
Chicago/Turabian StyleSchories, Lars, Nico Dahringer, Udo Piram, Anay Raut, Stella Nikolaou, Ioannis Gragkopoulos, Ioannis Tsetsinas, and Maria Panou. 2024. "Safety Performance Assessment via Virtual Simulation of V2X Warning Triggers to Cyclists with Models Created from Real-World Testing" Sustainability 16, no. 2: 610. https://doi.org/10.3390/su16020610