1. Introduction
Road transport ensures the mobility of people and goods, although it still poses several challenges. For instance, the European Union’s policies address, amongst other problems, those of traffic congestion, safety, pollution and carbon footprint. The goal is to foster sustainability of road transport which is de facto the most common means of displacement in the EU [
1]. One of the main research fields that is focused on these issues is Automated Driving (AD), the goal of which is to deploy Automated Vehicles (AVs) to decrease accidents, emissions, and congestion, amongst other things. Examples of AVs exist [
2], but they are still far from a globally adoptable solution mainly due to their limitations in complex environments (e.g., crowded urban areas, emergency manoeuvres). Coping with the real world is one of the biggest challenges for an AV, and current research suggests that the solution could be the Cooperative Intelligent Transport Systems (C-ITSs). These systems are based on communication between vehicles, other road users, road infrastructure as well as back-end Information and Communication Technologies (ICT) systems and services, which cooperate with one another, exchanging information (e.g., positions, detections, warnings, recommendations). The enabling technology is vehicle-to-everything communication (V2X) which can be performed by the vehicle either directly with local elements such as other vehicles (V2V), road side units (V2I), vulnerable users’ devices (V2P), or indirectly through internet-based services dispatching messages to/from users (V2N). With such pre-conditions, V2X enhances and extends the AV local sensing with information such as other vehicles’ and vulnerable road users’ motion; static, temporary, and dynamic signs; traffic light phases and related timing; local high definition (HD) map elements and map changes; predicted hazards. Amongst the recently standardized messages to share V2X data, the Collective Perception Message (CPM) is an outstanding means for AV to share not only their position but also their sensed objects. Within AVs, one way to ingest and manage all this data, and in particular Collective Perception (CP) data, is through the use of the Local Dynamic Map (LDM), which is essentially a database storing information about the environment of interest.
The concept of the LDM was born from the cooperation between the SAFESPOT [
3] and CVIS projects [
4]. In particular, the LDM was a product of the SINTECH project, a SAFESPOT subproject, and was developed to store static/dynamic sensor and communication information after an appropriate data fusion process. The LDM was structured as a geo-referenced local database in which each node contained the aforementioned data to be served to all the applications that needed it. After these projects ended, the LDM was first introduced in the Technical Report ETSI TR 102 863 [
5] in 2011 and then standardized in the European Standard ETSI EN 302 895 [
6] in 2014 by the European Telecommunications Standards Institute (ETSI). The technical report defines the LDM as a
“conceptual data store which is embedded in an ITS (Intelligent Transport System) Station (ITS-S) and which contains topographical, positional and status information related to ITS-Ss within a geographic area surrounding the host station”
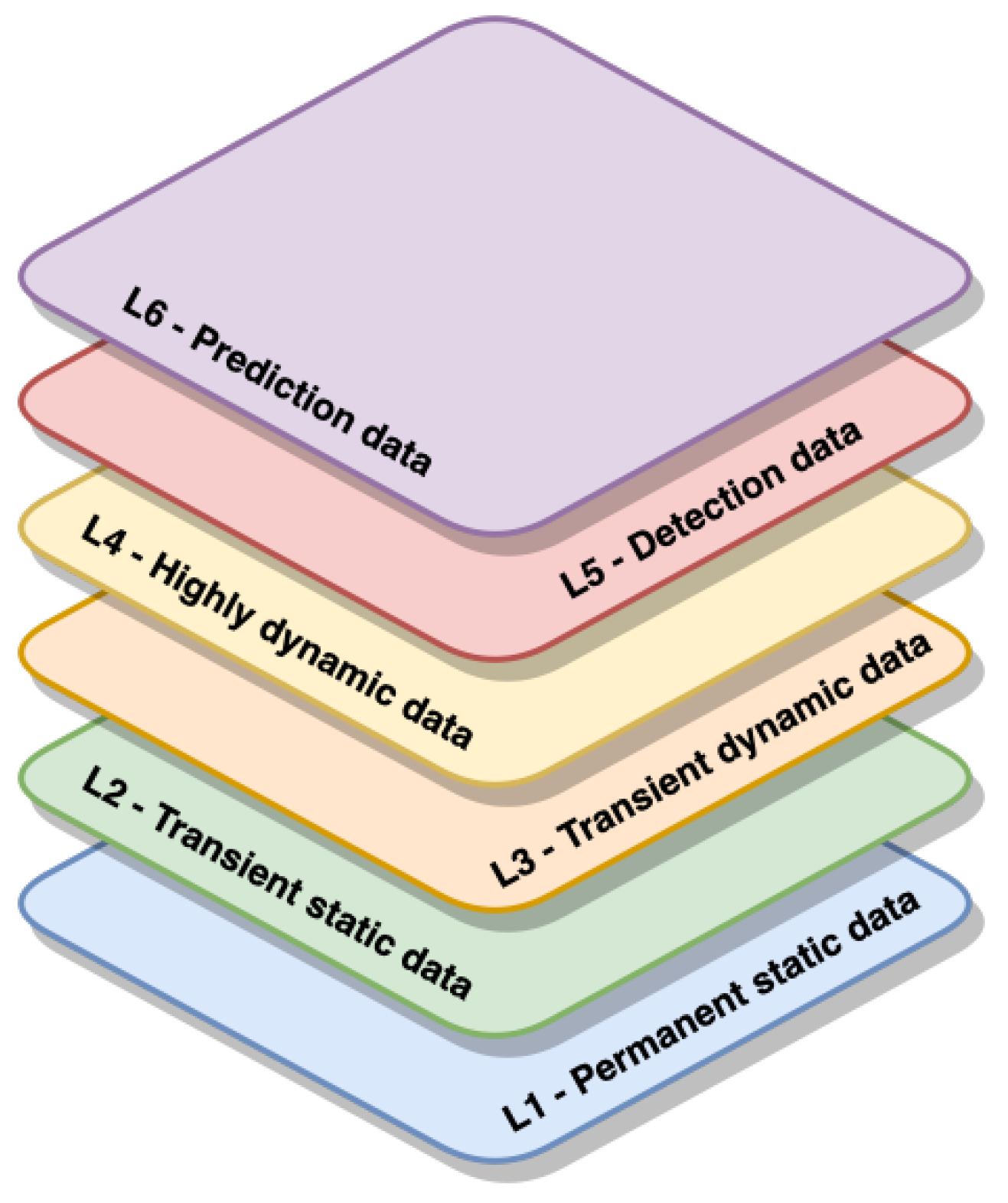
and was organized in a four-layer structure that stores data with different levels of dynamicity:
Permanent static data (e.g., road topography);
Transient static data (e.g., position of traffic signs);
Transient dynamic data (e.g., temporary speed limits due to roadworks);
Highly dynamic data (e.g., other ITS-Ss information).
Research on the LDM can be divided into two main branches: research that built on top of the existing standardized structure, and research that did not. Regarding the former, the most notable works are from Hideki Shimada et al. [
7], who followed ETSI guidelines to implement the LDM; Nicole El Zoghby et al. [
8], who increased the Field of View (FoV) of communicating vehicles by fusing the fourth layer of shared LDMs; Fatima Almheiri et al. [
9], who paved the way to higher levels of AD by extending the LDM with additional layers for information gathered externally; Carlos Mateo Risma Carletti et al. [
10], who extended the standard LDM with their Platoon LDM, a shared database system that efficiently manages data within autonomous vehicle platoons, reducing redundancy and computational demands. A greater amount of research has instead focused on modifying and redefining the standardized LDM. The main works include Bart Netten et al. [
11], who saw ETSI LDM as primarily meant for in-vehicle applications and proposed DynaMap, a LDM specialised for roadside applications; Mikel García et al. [
12], who presented a data model for the LDM which is both scalable and flexible using a Neo4j graph database and OpenLABEL as a common data format; Maike Scholtes et al. [
13], who developed a six-layer LDM that increases the granularity of the information and enriches its contents; Kun Jiang et al. [
14], who proposed a seven-layer structure that solves the lane-level map model and route planning problems.
The LDM represents a great tool to efficiently store the data needed and collected by an AV, but it is limited to remaining local to the ITS it runs on. To overcome this issue, the idea is to combine it with CP, allowing ITSs to share data and combine their respective local information. CP is defined by ETSI in [
15] as
“the concept of actively exchanging locally perceived objects between different ITS-Ss by means of V2X communication technology”
By means of CP, ITS-Ss can share information to be merged in their LDM, resulting in wider FoVs and more accurate detection, amongst other things, without the need for prohibitively expensive sensor systems.
Significant contributions to CP research include the following: Seong-Woo Kim et al. [
16,
17,
18], who created a framework to extend perception beyond line-of-sight, a cooperative driving system using CP, and methods for improving AD safety and smoothness; Pierre Merdiganc et al. [
19], who integrated perception and vehicle-to-pedestrian communication to enhance Vulnerable Road Users’ (VRUs) safety; Aaron Miller et al. [
20], who developed a perception and localization system allowing vehicles with basic sensors to leverage data from those with advanced sensors, thus elevating AD capabilities; Xiaboo Chen et al. [
21,
22], who proposed a recursive Bayesian framework for more reliable cooperative tracking, and a robust framework for multi-vehicle tracking under inaccurate self-localization; Adamey et al. [
23], who introduced a method for collaborative vehicle tracking in mixed-traffic settings; Francesco Biral et al. [
24], who demonstrated how the SAFE STRIP EU project technology aids in deploying the LDM for Cooperative ITS safety applications; and Stefano Masi et al. [
25], who developed a cooperative roadside vision system to enhance the perception capabilities of an AV; Sumbal Malik et al. [
26], who highlight the need for advanced CP to overcome challenges in achieving level 5 AD; Tania Cerquitelli et al. [
27], who discussed in a special issue the integration of machine learning and artificial intelligence technologies to empower network communication, analysing how computer networks can become smarter; Andrea Piazzoni et al. [
28], who discuss how to model CP errors in AD, focusing on the impact of occlusion on safety and how CP may address it; Zhiying Song et al. [
29], who presented a framework for evaluating CP in connected AVs, emphasizing the importance of CP in increasing vehicle awareness beyond sensor FoV; Mao Shan et al. [
30], who introduced a novel framework for enhancing CP in Connected AVs by probabilistically fusing V2X data, improving perception range and decision-making in complex environments.
The VeDi 2025 project (Mise—Ministero dello Svilippo Economico, actually Ministero delle imprese e del, made in Italy) used V2X communication for manoeuvre negotiation between connected and Automated Vehicles. Amongst the enabling technologies, VeDi 2025 studied Local Dynamic Maps as a means to efficiently store perception data within the vehicle and then make those data available to applications. Given the need for Automated Vehicles to improve their awareness horizon, CPMs were used to enhance vehicle perception beyond the sensors also considering that not all road users (e.g., vehicles, pedestrians) are equipped with V2X communication. Using CPM, as demonstrated, e.g., in 5G CARMEN, the ego vehicle can be aware of the surrounding environment by means of its own sensors and shared sensors’ data.
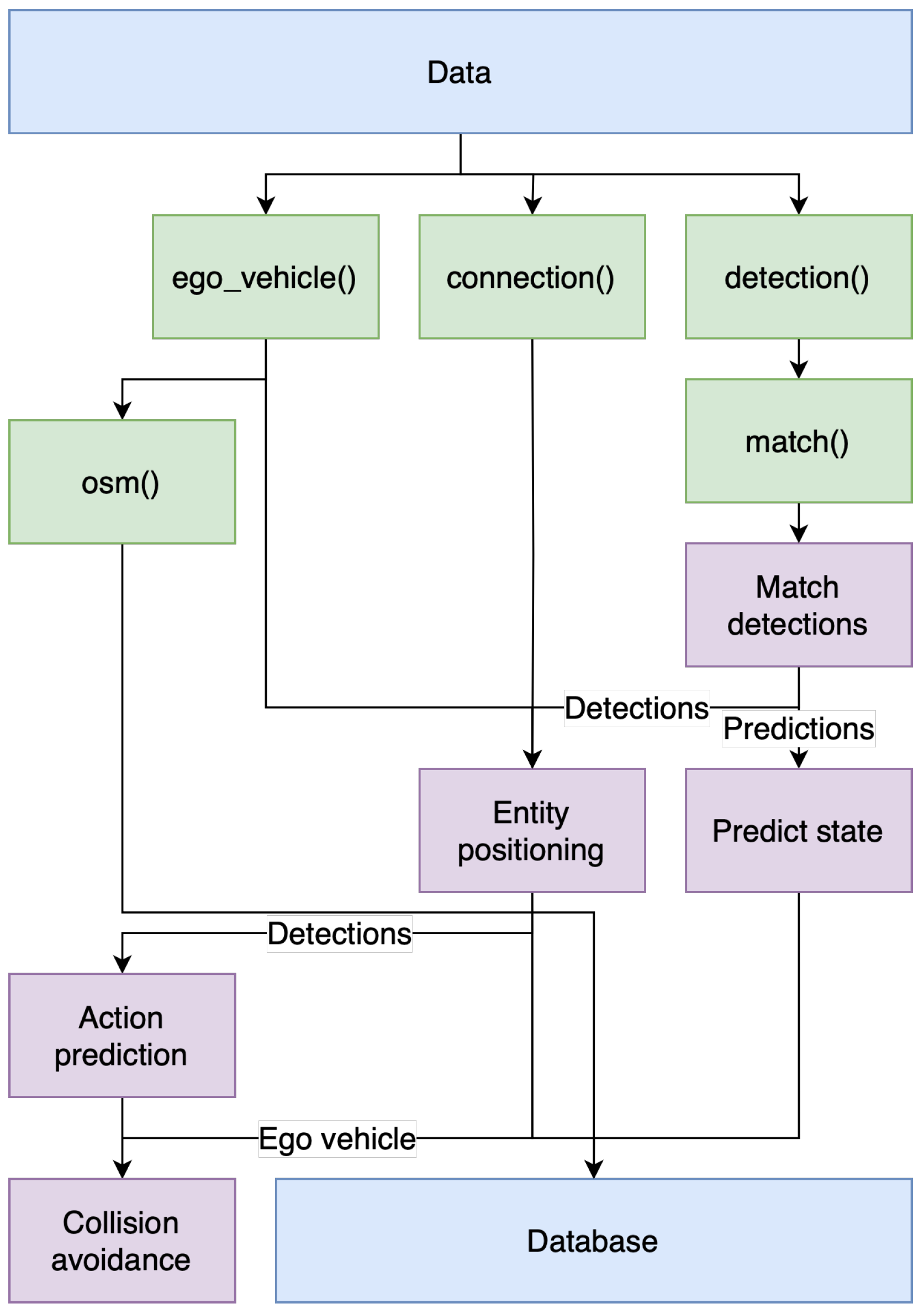
The purpose of this study, carried out within the VeDi 2025 project, is to add two layers to the standardized LDM, and develop efficient and accurate algorithms designed to enhance AD by exploiting the LDM coupled with CP. To achieve this, we designed, implemented, and tested a six-layer LDM that extends the standardized four-layer structure. The fifth layer maps detected non-connected entities (e.g., VRUs), whilst the sixth maps the predicted future actions of such detected entities. The LDM is implemented as a Neo4j graph database with a custom Application Programming Interface (API), developed with the Python language, that manages it and implements the algorithms. Finally, the implementation is tested on real-world data which we collected with a prototype vehicle from Centro Ricerche FIAT (CRF) in the urban, suburban, and highway scenarios of the Trento area, Italy. Aside from this brief introduction, the rest of the article is organized as follows:
Section 2 describes with sufficient detail the design, the implementation, and the testing framework of the developed multi-layered LDM;
Section 3 reports and interprets the results obtained from the conducted tests;
Section 4 discusses the developed solution analysing the obtained results;
Section 5 summarizes the main results, and discusses the possible future works, concluding the article. The abbreviations used in this paper are listed in the Abbreviations section at the end of the paper, just above the appendices.
4. Discussion
In this section, we discuss the the results we reported in
Section 3 that show, via the KPIs, the effectiveness of using the LDM as a DB for both data generated by the AV and incoming data from other entities.
Regarding the matching accuracy, whose results are reported in
Table 1, we obtained an overall accuracy of
across the scenarios, meaning we could correctly match entities coming from different (simulated with past DB data) sources. This result is significant on its own, and is especially so after considering the challenging conditions in which we collected the data. As it is often the case with GNSS-related data, the uncertainty in the received measurements is heavily dependent on environmental aspects. Having conducted the tests in Trento, an Italian city with relatively high buildings and surrounded by mountains, we knew in advance that the resulting measurements would not have had the ideal performance of the sensor system. This resulted in position errors of at least 2 m, which are especially relevant for the tight urban area of Trento. Given that the incoming data of the sensor system was already filtered, and we were working in post-processing, we decided to take it “as is”, as this would be the case for incoming measurements received via CP. However, once we deploy our solution on the prototype vehicle and use it online, we will consider the use of additional advanced estimation techniques, such as the robust lateral velocity estimator developed by Mauro Da Lio et al. in [
39], to reduce the uncertainty of the GNSS system.
Moving on to the processing time
Table 2, we obtained an average computation time per step of only 0.008 s + 0.035 s < 0.1 s, less than half of our real-time threshold. However, we did have six steps which were above the 0.1 s threshold. After developing a prototype of our LDM using NetworkX instead of Neo4j, whose results are reported in
Table 3, we were able to say that the communication between the external Neo4j DB and the loading of OSM maps were key factors in making those steps surpass the real-time threshold. While developing the prototype with NetworkX, we also identified the main weakness of Neo4j. Although Neo4j is incredibility fast with large graphs (i.e., millions of nodes and edges), the delay it takes to send a request to the database is not worth it for smaller graphs like ours (i.e., tens of thousands of nodes and edges). Therefore, we came to the conclusion that a graph DB managed directly in Python, such as NetworkX, better suits the needs of the small graph we keep local to the AV. On the other hand, Neo4j would make more sense to be deployed on the infrastructure side; if the graph size was likely to be far greater, the communication delay would be less noticeable, and the scalability of Neo4j would immediately show its benefits. Lastly, changing to a DB managed directly inside the API would allow us to convert the codebase to
C++ and use the igraph package [
40], which would increase our performance by at least one order of magnitude.
The data persistence KPI, whose results are reported in
Table 4, tells us the maximum number of prediction steps the LDM can take when predicting the future state of a detected entity without receiving any new measurement. Since the prediction step corresponds to 0.1 s, we can conclude that on average the LDM was able to predict the movement of detected entities for
across all scenarios. This is crucial as it enables the LDM to not lose “sight” of an entity even if it momentarily disappears behind a blind corner or a bus. Although the prediction window is not wide,
is enough to fill in the blanks that may emerge from communication delays/interruptions or temporary occlusions of entities, just to name a few. Improving the positioning of the ego vehicle and/or of detected entities, for example, using additional advanced estimation techniques like the one mentioned a few lines above [
39], will undoubtedly improve the data persistence capabilities as well.
Lastly, the action prediction accuracy, whose results are reported in
Table 5, shows us how accurate the LDM is in predicting where a detected entity will go next. With an overall accuracy of
, we can confidently say we know where an entity will be most of the time. This is also an area that would benefit from additional advance estimation techniques, just like with data persistence. Moreover, at the moment, we are focusing only on predicting actions at each time step, but we could try to use multiple past predictions to have a more reliable estimate after some time steps.
All in all, we can confidently say that the ability to easily handle environmental and detection data, be they from the ego vehicle or through CP, allowed us to quickly develop algorithms that support the development of AD. We have not talked about the collision prediction algorithm as we did not have enough data, but that is just one of the many algorithms we can develop by building on top of the readily available data stored in the LDM. In fact, thanks to entity positioning, match detection, data persistence, and action prediction algorithms, we could easily develop the collision avoidance algorithm with just some additional logic and a few lines of code. That is why we are planning to embed our LDM in our motion planning framework for at-limit handling of racing vehicles [
41], to have a separate application that can take the burden of analysing the environment of interest and serve vital information quickly, reliably, and only when needed (e.g., an incoming collision or the next action of an opponent on the racetrack).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}