5.2. Tests of Combining LHS-MCS and Repeated Power Flow
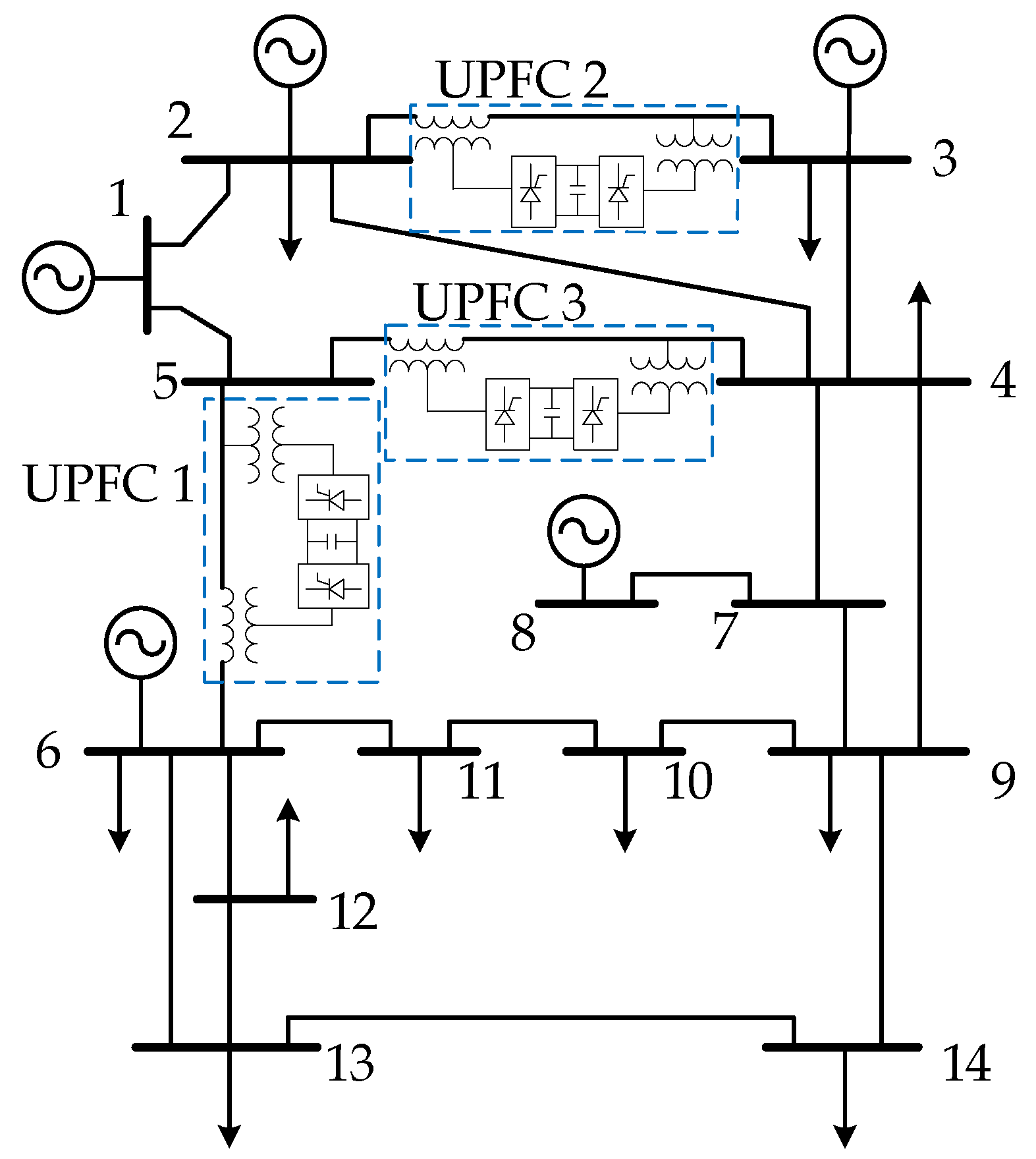
5.2.1. Test System under Study
This section mainly studies the η of the initial state and ALSC of each probabilistic scenario. These random scenarios (e.g., Case B1) are established based on the deterministic cases used above. The uncertainties of the load follow the normal distribution, the mean value is the original basic data, and the standard deviation is 5% of the mean value. All loads are assumed to have a constant power factor, that is, the power factor remains constant throughout the active power change. The correlation coefficient of every two loads is set to 0.2.
At the same time, the wind farms are added to buses 6, 9, 10, and 13, and the numbers of wind turbines are 13, 7, 14, and 21, respectively.
In addition, the relationship between the active power output
P of the wind turbine and the wind speed
v is as follows:
The unit of P is MW, and that of v is m/s.
The wind speed in the area where the wind farms are located follows the Weibull distribution with the proportional parameters
and shape parameters
. Meanwhile, there is a strong correlation between the wind speeds of each wind farm, and the correlation coefficient matrix is as follows:
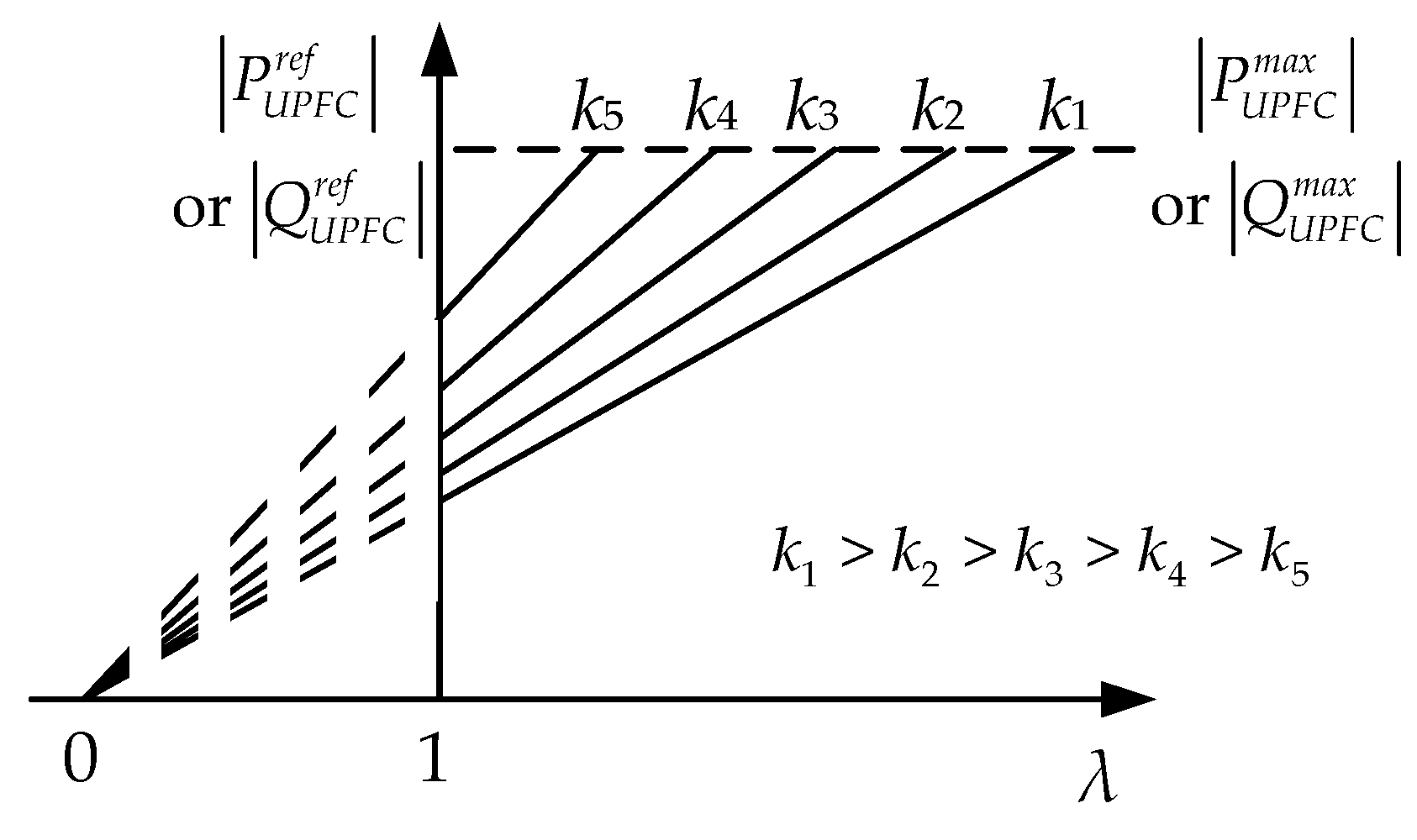
Set the maximum control parameters of the three UPFCs, as shown in
Table 5. The control coefficient
k is set to 2, while the specific control parameters of UPFC can be obtained by Equation (24).
To verify the performance of the LHS-MCS method under different scenarios, Case B1 is taken as the basis, and the other five cases (Case B2~Case B6) are designed for comparison. These cases are shown in
Table 6.
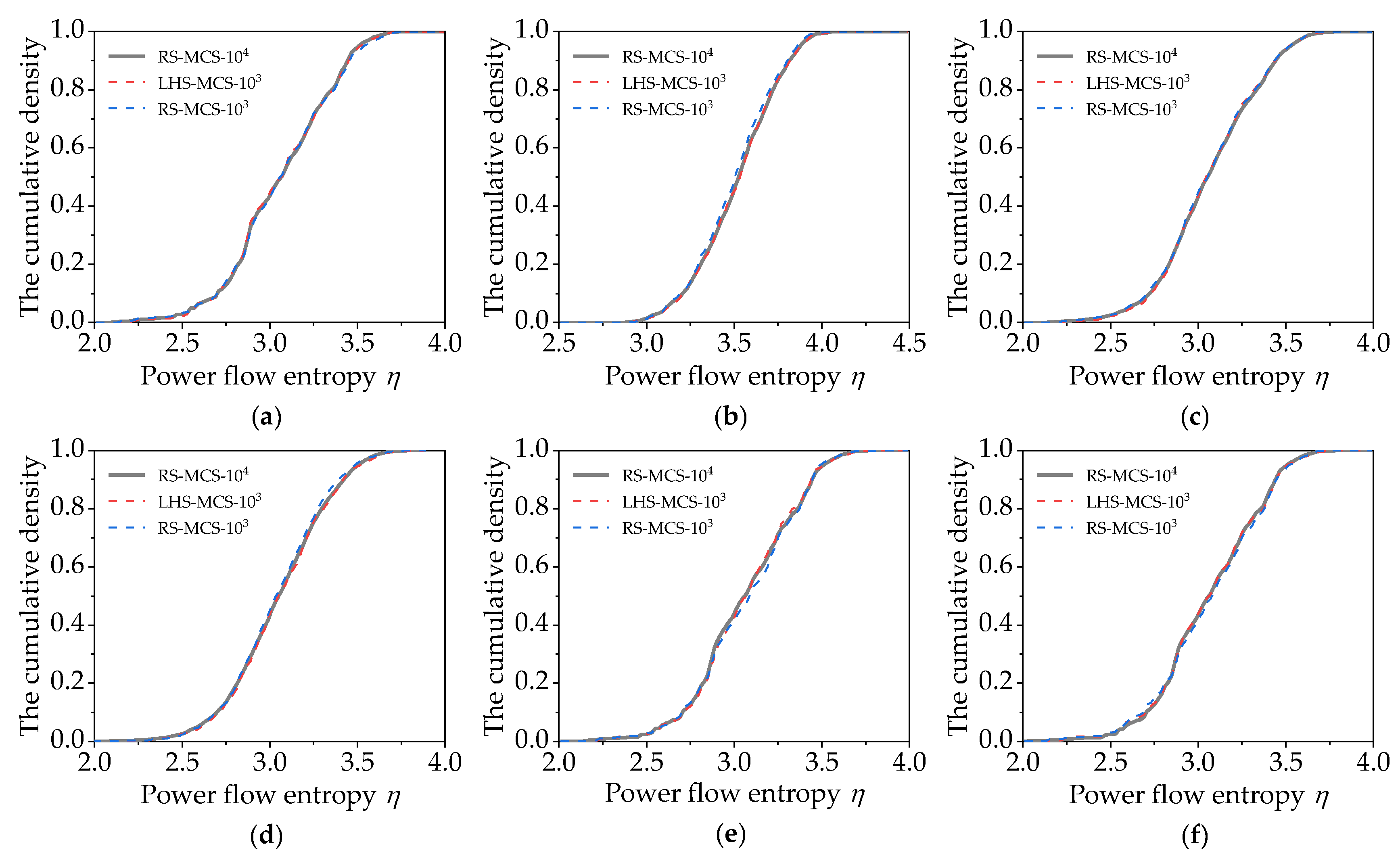
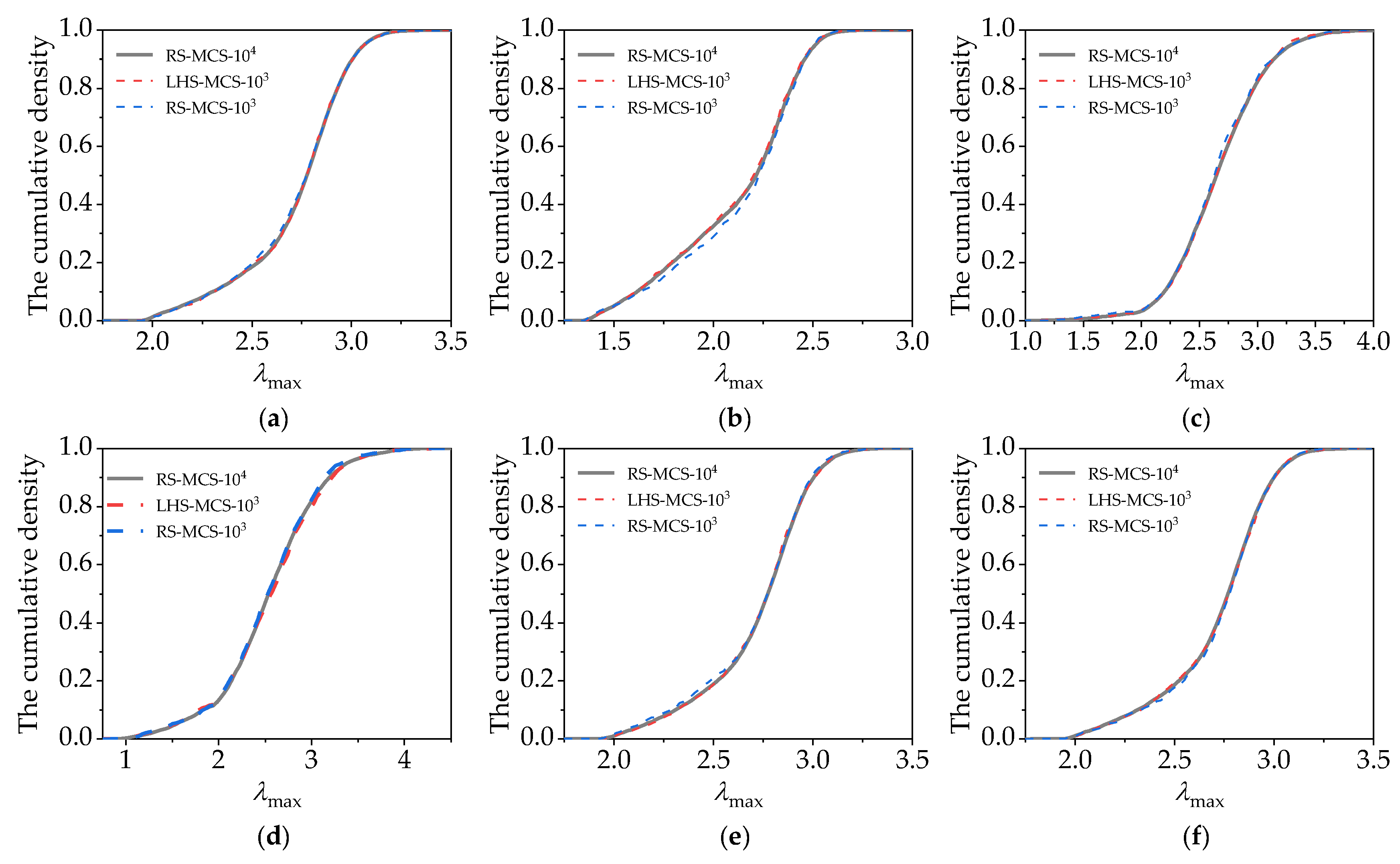
The results of the RS-MCS method are used as the reference data and compared with the LHS-MCS method. The sampling number of the RS-MCS method is set to 10000 and 1000 (i.e., RS-MCS-104 and RS-MCS-103), and that of the LHS-MCS is set to 1000 (i.e., LHS-MCS-103). The results of RS-MCS-104 are regarded as the reference. The convergence criterion of the repeated power flow calculation is assigned as .
5.2.2. Analysis of the Results
Through the calculation of Case B1~Case B6, it can be obtained that the average calculation time of RS-MCS-104 is 2497.6 s, while that of LHS-MCS-103 and RS-MCS-103 is about 248 s.
Under different cases, the cumulative density function (CDF) of
η and
by PRPF method based on LHS-MCS-10
3, RS-MCS-10
3, and RS-MCS-10
4 are obtained, as shown in
Figure 12 and
Figure 13, respectively.
It can be seen from the figure that in each group of experiments, the cumulative density curves calculated by the two methods are basically in coincidence. Thus, it is proved that LHS-MCS has a higher calculation accuracy.
From the figure, the cumulative density curves calculated by the three methods are approximate in each case. However, it is evident that compared to RS-MCS-103, the curve calculated by LHS-MCS-103 is closer to the curve calculated by RS-MCS-104. Therefore, it is proven that LHS-MCS has higher computational accuracy.
At the same time, the mean and variance relative errors of
η and
can be obtained by using LHS-MCS-10
3 and RS-MCS-10
3 under different cases, which are shown in
Table 7. The relative error is calculated by the following Equation (27):
where
and
represent the relative errors in calculating the mean and variance of each index, respectively.
represent the mean values of the results calculated by LHS-MCS-10
3 or RS-MCS-10
3.
represent the variances in the results calculated by LHS-MCS-10
3 or RS-MCS-10
3.
It can be concluded from the above data that, when calculating PPF based on the LHS-MCS method, adopting fewer samplings can also guarantee high calculation accuracy and save a lot of time. From the above analysis, the LHS method can be used in the probabilistic power flow calculation of the AC system with UPFC. Therefore, in the subsequent calculation, the LHS-MCS method is used to study the related problems.
5.3. The Positive Impact of UPFC on the System under Probabilistic Scenarios
To analyze the relationship between the power flow entropy of the initial state and the available load supply capability of each sampling, Case C is set up to experiment by analyzing the operating state of the system under different control coefficients. The probabilistic scenario of Case C is the same as that of Case B1. Furthermore, in Case C, the control coefficient
k is adjusted from small to large (1.1~3.0). In fact, when the control coefficient
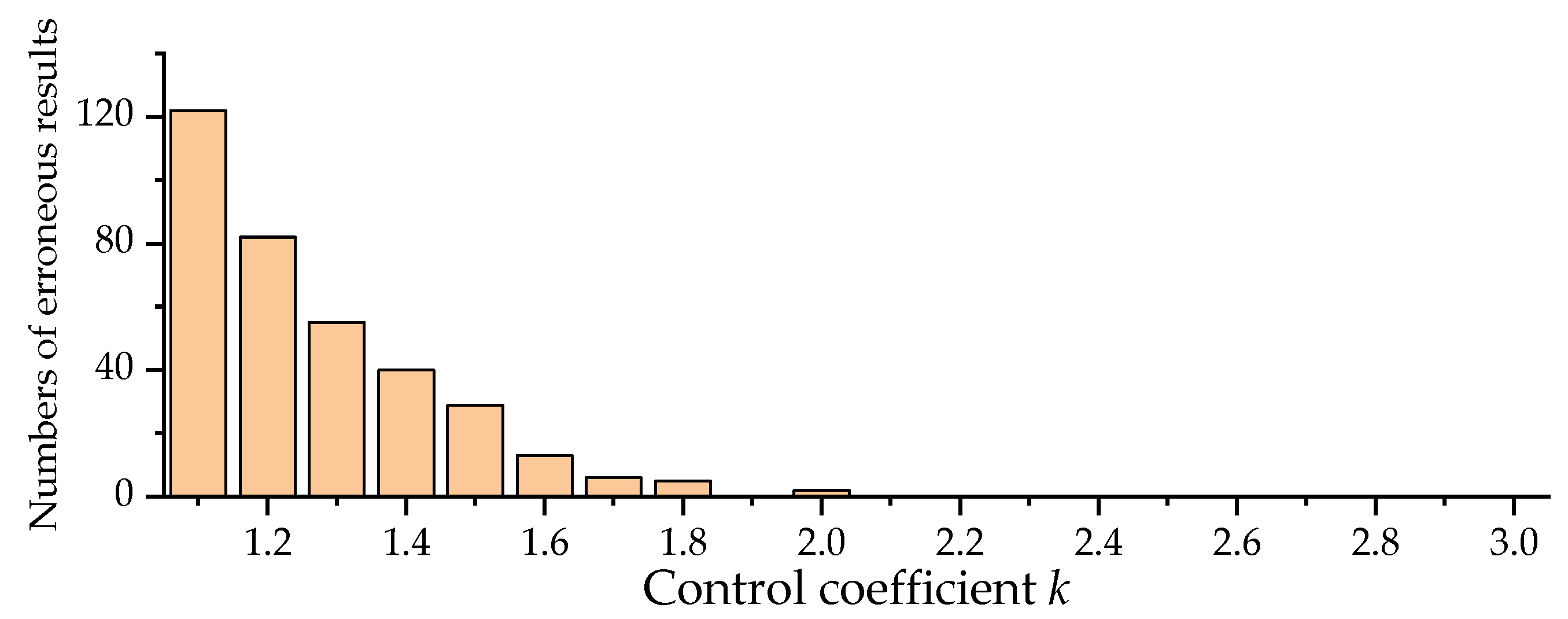
k is small, the power flow calculation may not converge. The relationship between the control coefficient and the numbers of non-convergence of the power flow can be obtained and shown in
Figure 14. In Case C, the sampling size of LHS-MCS is 1000 as well.
As indicated in
Figure 14, when
k is small, the number of non-convergences of the power flow is large (the total calculation times corresponding to each value of
k is 1000). As
k increases, the number of non-convergence times of the power flow decreases significantly. The reason for the non-convergence of power flow analysis is as follows: when
k is small, the active and reactive power of the branches controlled by UPFC changes only slightly in the process of load change and maintains a large value at any time. In other words, when the load of each bus is still at the basic level, the control transmission power of related branches is already at a large value, resulting in the chaos of the power flow distribution of the whole system, which makes the active power of some branches exceed the limits all the time. This results in a non-convergent power flow calculation. Therefore, it becomes clearly necessary to select a reasonable
k so that the number of non-convergence times of the system power flow can be effectively reduced.
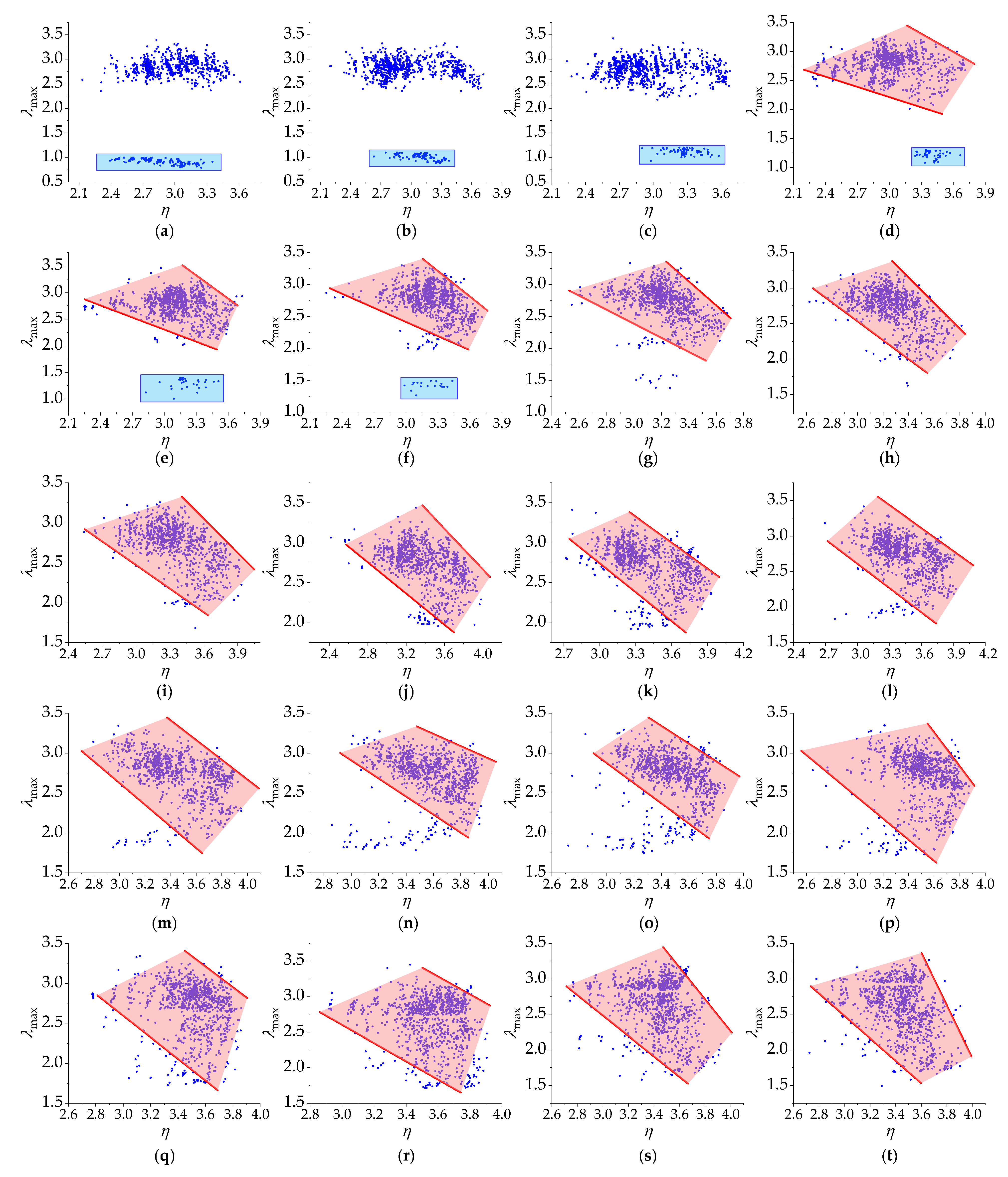
After removing the results which are not convergent, the relationship between the
η of the initial state and the
capability under a series of different control coefficients can be obtained in terms of the scatter plot, as shown clearly in
Figure 15.
As can be seen from the red part of
Figure 15, for most of the UPFC control coefficients,
generally decreases with the increase in the
η of the initial state. That is, a smaller
η often corresponds to a larger available load supply capability. The analysis of the reason can be interpreted as follows: with the increase in the system load, it is bound to cause the transmission power of each branch to increase. If the
η of the initial state is smaller, it indicates that the power flow of the system is more rational, and the branch loading rate is lower at this condition. Correspondingly, with the increase in the system load, it is less likely that a certain branch will quickly increase its capacity. The power system is more capable of supporting such an increase in load. Therefore, the system would have more available load supply capability. In addition, as can be seen from the blue box in
Figure 15a–f, when
k is small, there exist some scenarios where the values of
are small. In other words, under these
k values, the ASLC of the system is small, which is not conducive to the secure operation of the power system.
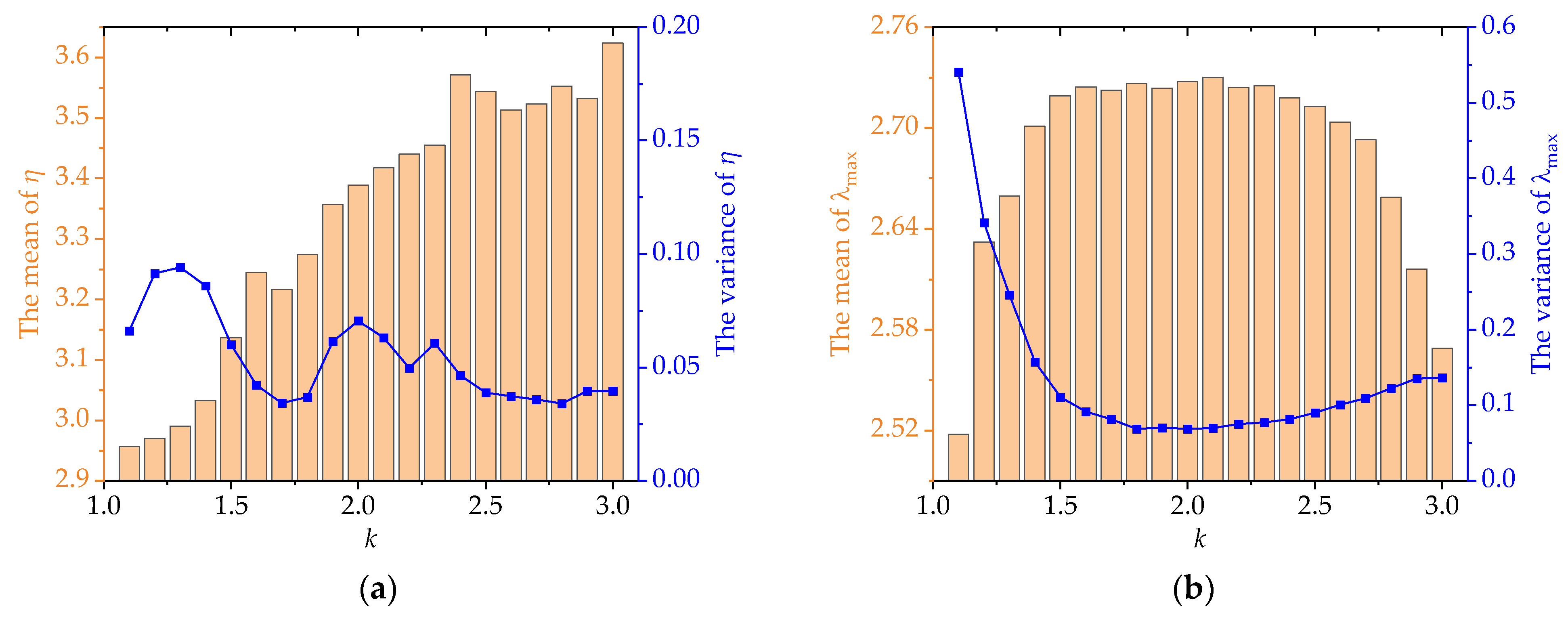
In addition, under different control coefficients, the mean and variance of
η and
are recorded and investigated, and are shown in
Figure 16 below.
As can be seen from (a) in
Figure 16, the
η at the initial state has different values with the changes in
k. Generally, with the growth of
k, the mean value of the
η keeps increasing. As can be seen from (b) in
Figure 16, with the growth of
k, the mean value of the
first increases and then it starts to decrease.
When
k = 1.1~1.4, the
η is small, but as previously analyzed, the power flow calculation will encounter the non-convergence issue more frequently. Corresponding to (b) in
Figure 16, the mean values of
of these situations are small, the variance values are large, and the
has a wide range of fluctuations.
When k is larger, the mean value of η at the initial point is larger, and is also smaller. It can be seen that when k = 1.8, 1.9, and 2.1, the mean and variance of the η are relatively small, indicating that the power flow at the initial state of the system is relatively reasonable. When k = 2.0, although the variance of the η at this time is large, the mean value of the η is very small, so the power flow distribution of the system is in a relatively good balance. Accordingly, when k = 1.8, 1.9, 2.0, and 2.1, the mean value of is relatively larger and the variance value is smaller, indicating that when the control coefficients are assigned to these values, the system can have a larger available load supply capability.
The above analysis shows that under the UPFC control parameters, the η at the initial state is smaller, which indicates that the power flow distribution of the initial state is more rational, and the available load supply capability of the system is larger. Therefore, it is necessary to adjust the control coefficient of UPFC to make the η at the initial state smaller for ensuring the stable operation of the power system. According to the test results herein, k = 1.8, 1.9, 2.0, and 2.1 can be considered as good options for the control parameters of UPFC.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}