1. Introduction
The path planning of autonomous vehicles refers to planning an optimal path from the starting point to the target point while completing obstacle avoidance. Accurate path planning is critical to the safe and stable operation of autonomous vehicles. Therefore, many scholars have conducted research on path planning for autonomous vehicles. Currently, such research has mainly focused on path planning algorithms under different constraint conditions. These algorithms establish environmental domain cost functions in road spaces for path planning. Basic methods, such as the A* algorithm [
1], Vector Field Histogram (VFH) [
2], Artificial Potential Field (APF) [
3], and so on, have been used. The curvature of the path planned using the A* algorithm is discontinuous, resulting in significant changes in motion parameters at turning points and making it difficult to apply it reasonably in the field of vehicles. In complex environments that require sensitive obstacle avoidance, the VFH method cannot be used, as it compresses obstacle information into a one-dimensional representation. The basic idea of the APF algorithm is to construct a human potential field in the working environment of vehicle movement. Under the action of the potential field, the vehicle trajectory moves along the gradient direction in which the resultant force field decreases the fastest, making it more suitable for the path planning of vehicle trajectories.
However, due to the two problems of the local minimum and an unreachable target, traditional artificial potential algorithms have limitations. By improving the gravitational and repulsive potential fields, the drawbacks of APF can be avoided. At present, there are many measures to improve the repulsive potential field, including introducing a repulsive field adjustment factor [
4] and reconstructing the repulsive field range of obstacles [
5,
6] and the repulsive field range of road boundaries [
7]. Some scholars have introduced dangerous potential fields [
8], or velocity-difference potential fields and acceleration-difference potential fields [
9], to improve traditional artificial potential algorithms. Some scholars have comprehensively considered the distance adjustment factor, dynamic road repulsion field, velocity repulsion field, and acceleration repulsion field to complete autonomous driving trajectory planning [
10]. In addition to improving the potential field function, the APF algorithm can also be integrated with other algorithms. This includes the Rapid Exploration Random Tree (RRT) algorithm [
11], A* algorithm [
12], complex resistivity method [
13], ant colony algorithm [
14], and cyclic reinforcement learning algorithm [
15]. The fusion algorithm can enable autonomous vehicles to avoid obstacles more safely and achieve the purpose of complementary advantages.
Different smoothing functions can be introduced to address the problem of uneven planned path trajectories obtained using the APF algorithm; for example, using the Sequential Quadratic Programming (SQP) algorithm to solve precise paths that meet safety requirements [
16] and introducing the LC algorithm to provide smoother and safer humanoid trajectories [
17]. In addition, it is also possible to consider establishing constraints on vehicle dynamics and different types of obstacles [
18] and safety distance models in different scenarios [
19], as well as providing adaptive motion planning strategies for fuzzy systems [
20]. These measures can improve the safety and smoothness of traditional APF path planning by correlating a vehicle’s automatic collision avoidance system with changes in the collision area.
The actual road scene is complex and unpredictable. So, the effectiveness of vehicle path planning algorithms can be verified through different experimental scenarios. Road scenes can be viewed from different perspectives, including different obstacle environments [
21], dynamic obstacle environments [
22], constant-speed and variable-speed obstacle vehicle environments [
23], and different manual-driving vehicle environments [
24]. The artificial potential field algorithm can be improved from various perspectives to adapt to different road scenarios. For example, in order to solve the problem of path planning under different velocities and different types of obstacles, Liu et al. (2021) proposed an adaptive path planning system with two fused potential fields [
25].
The researchers improved the artificial potential field algorithm from three aspects: potential field function, path smoothing, and obstacle avoidance in different scenarios. The above research has improved the APF algorithm from different perspectives. However, vehicle dynamics and APF potential field functions in special environments, such as ice and snow, need to be redesigned. At the same time, different types of obstacles to vehicles also have a significant impact on the dynamic obstacle avoidance path planning of vehicles. Therefore, this article proposes a dynamic path planning algorithm for autonomous vehicles on ISRs based on an improved APF. This algorithm considers the driving characteristics of vehicles on ISRs, ensuring the applicability of the planned path. Meanwhile, by improving the APF algorithm, curvature continuous paths can be generated, meeting the driving comfort and safety requirements of the planned path. Finally, the proposed method was simulated and validated through Carsim/Simulink to determine the effectiveness and reliability of the algorithm. The flowchart of this article is shown in
Figure 1.
The research contents of this paper are as follows:
Section 2 introduces the improved algorithm proposed in this paper in detail. Firstly, the principle of the traditional APF algorithm is introduced. According to the influence of the driving characteristics of the vehicle in an ISR environment, the gravitational potential field and the repulsive potential field are improved. Finally, the dynamic processing and trajectory smoothing of the planning path results are carried out, and the dynamic planning path of the autonomous vehicle in an ISR environment, based on the improved artificial potential field algorithm, is obtained.
Section 3 introduces the simulation platform for testing the effectiveness of the improved APF algorithm. The comparative experiments of vehicle performance parameters under different algorithms and different models are designed and discussed.
Section 4 summarizes the full paper.
2. Methods
2.1. Traditional APF Algorithm
For path planning problems, the entire artificial potential field U in the motion space is the vector superposition of the gravitational potential field (
Uatt) and the repulsive potential field (
Urep) [
26], that is
U =
Uatt +
Urep. The gravitational potential field ensures the vehicle’s global tracking of the target state, while the repulsive potential field ensures the vehicle’s safe avoidance of multiple obstacles. By calculating the direction of the combined force of the gravitational and repulsive potential fields, the path along which the potential function descends is selected to reach the global minimum potential field. According to the definition of a potential field, vehicles always have a tendency to move towards low-potential-energy regions. Therefore, starting from the planning starting point, vehicles use the potential energy difference of the virtual potential field to move, and their movement trajectory is the planning path of the APF algorithm.
2.1.1. Gravitational Potential Field
The gravitational potential field potential energy of a vehicle monotonically increases as its distance from a target increases. In path planning problems, vehicles can be treated as particles,
X = (
x,
y)
T, in a two-dimensional space environment, with their motion space being a two-dimensional space. In traditional APF algorithms, the gravitational potential field (
Uatt) generated using the target point is generally expressed as:
In this formula: katt indicates the positive proportional gain factor of the gravitational potential field; X denotes the position coordinate of the vehicle; Xg represents the position coordinates of the target point; m indicates the gravitational potential field factor—in this paper, m = 2; and represents the relative distance between the vehicle and the target.
The gravitational force generated by the vehicle,
Fatt, represents the fastest descent direction of the gravitational potential field (
Uatt), and its expression is as follows:
2.1.2. Repulsive Potential Field
The repulsive potential field potential energy of a vehicle monotonically decreases as its distance from the obstacle increases. When reaching an obstacle, the repulsive potential energy of the vehicle is infinite, indicating that the repulsive potential field should try to avoid colliding with the obstacle as much as possible. In traditional APF algorithms, the repulsive potential field (
Urep) generated via obstacles can usually be expressed as follows:
In this formula: krep indicates the positive proportional gain factor of the repulsive potential field; X0 represents the position coordinates of obstacles; represents the maximum influence distance of the obstacle repulsive potential field; and indicates the relative distance between the vehicle and the obstacle.
The repulsive force (
Frep) generated via obstacles represents the fastest descent direction of the repulsive potential field (
Urep), and its expression is as follows:
2.1.3. Composite Potential Field
The total potential field function
U(
X) is the composite potential field that combines two potential fields:
Similarly, the resultant force
F(
X) on the vehicle is the vector resultant force of the gravitational force
Fatt(
X) and the repulsive force
Frep(
X), as shown in
Figure 2.
Using Formulas (5) and (6), the potential energy and potential field resultant force of each point in the moving space can be calculated. The vehicle moves under the guidance of a synthetic potential field until it reaches the target point. The trajectory of a vehicle is the planned path. According to the potential energy difference of the potential field, the curve with the fastest descent along the potential field function U(X), which is the global optimal path, is selected.
2.2. Driving Characteristics of Vehicles in an ISR Environment and a Modeling Scenario
ISRs have an impact on the longitudinal and lateral driving of vehicles. A longitudinal braking distance model for icy and snowy roads was constructed in terms of longitudinal driving, and a lateral displacement model for icy and snowy roads was constructed in terms of lateral driving. The artificial potential field can be improved using the two indicators of longitudinal braking distance and lateral displacement as limiting conditions.
2.2.1. Longitudinal Braking Distance Model on ISRs
For the longitudinal braking distance model on icy and snowy roads, inspiration was drawn from Macnabb’s tracking and testing of vehicle traction and braking capabilities on winter roads [
27]. Based on the test results of different vehicles and tires, taking into account the driving speed and stopping distance of vehicles on icy and snowy roads, the friction coefficient calculation formula is as follows:
In this formula, V represents the driving speed (km/h), and dl indicates the longitudinal braking distance on ISRs (m).
When the friction coefficient in icy and snowy weather is known, the longitudinal braking distance model of the vehicle at the corresponding speed can be obtained according to Formula (8):
2.2.2. Lateral Displacement Model of ISRs
When a vehicle is changing lanes, mechanical balance can be used to study the balance problem of the vehicle. By decomposing the force acting on the vehicle along the lateral and vertical (
x-axis,
y-axis) of the vehicle body, the following equation can be obtained based on the force balance:
In this formula:
m represents the vehicle mass (kg);
αy represents the lateral acceleration of vehicles on ISRs (m/s
2);
g indicates the gravitational acceleration (m/s
2);
β represents the road slope;
Ffi and
Ffo represent the friction force of vehicles on ISRs (
N); and
Ni and
N0 indicated the supporting force of the road surface on the vehicle (
N).When the vehicle is about to slip, the maximum lateral friction force of the tires is equal to the adhesion between the wheels and the road surface:
In this formula, μ represents the road adhesion coefficient on ISRs.
The lateral acceleration of the vehicle under the critical state of sideslip can be obtained by combining Formulas (9)–(11), as follows:
In this formula, αyc represents the lateral acceleration of the vehicle in a critical state (m/s2).
According to the “Technical Standards for Highway Engineering” [
28], the recommended superelevation values for curved road sections are provided, and sin
β can be converted to be approximately equal to
i, and cos
β to be approximately equal to 1. Therefore, the formula can be simplified as follows:
In this formula, i indicates the superelevation value of curved road sections.
The lateral displacement value is related to the lateral acceleration and driving speed, and the relationship formula is as follows:
In this formula: V0 represents the driving speed before acceleration (km/h); Vt represents the driving speed after acceleration (km/h); and dc represents the lateral displacement value on an ISR surface (m).
2.2.3. Modeling Scenario Description
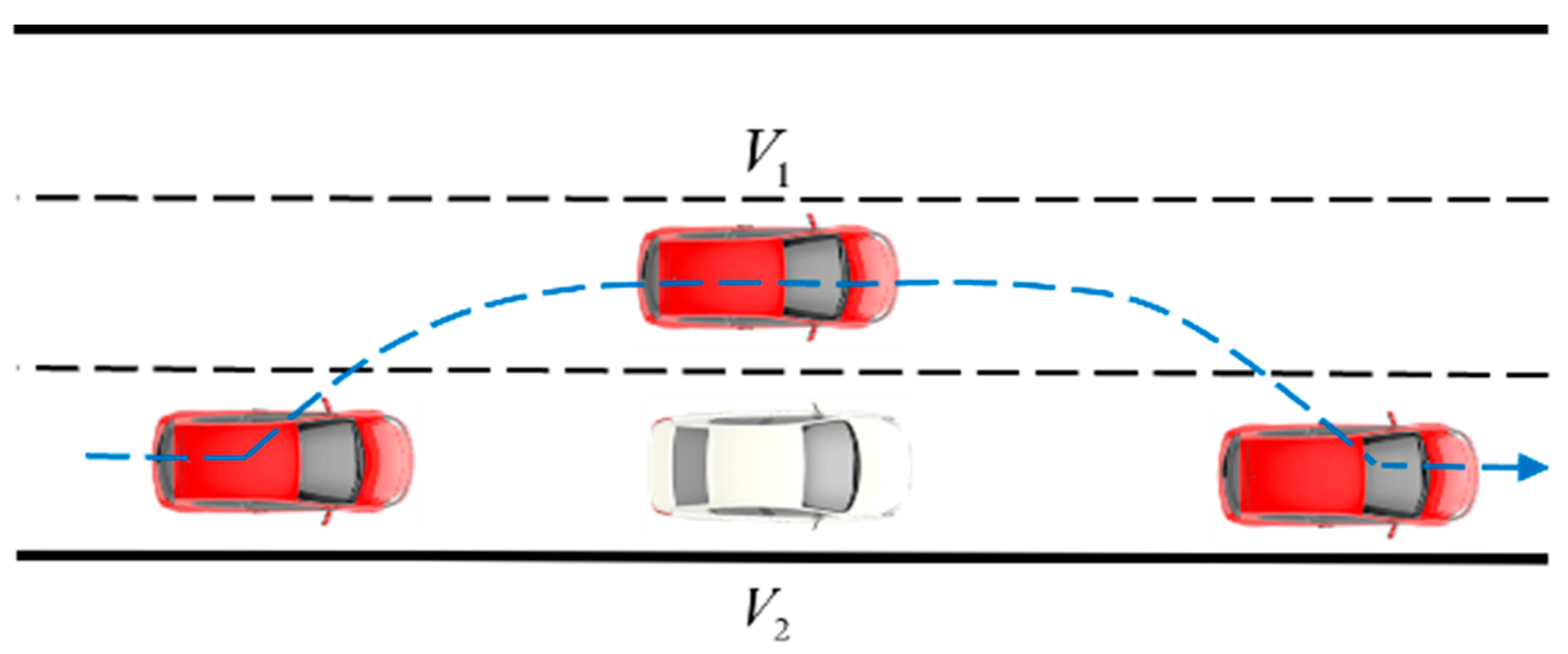
When two vehicles are in the same lane and the obstacle vehicles in front of this lane are moving slowly, it is necessary to change lanes or overtake to avoid traffic accidents such as scratches and collisions between the two vehicles. The target vehicle generally needs to turn to avoid obstacles, as the speed situation is complex and variable. Therefore, this article only discusses the situation in which the obstacle vehicle ahead is traveling at a uniform speed and the target vehicle is traveling at a uniform longitudinal speed in a straight-road driving scenario. And the target vehicle’s speed is greater than the obstacle vehicle ahead, and there are no other vehicles or obstacles around the two vehicles. When this scenario is taken as the research content, the effectiveness of dynamic path planning for an autonomous vehicle was verified under two working conditions for static obstacle vehicles and dynamic obstacle vehicles. The straight-lane scenario is shown in
Figure 3, in which the red vehicle is the target vehicle, with a longitudinal speed
V1 of 8 m/s, and the white vehicle is the obstacle vehicle, with a speed
V2 of 10 m/s.
2.3. Improved APF Algorithm in an ISR Environment
Due to the low friction coefficient of ISRs, the driving dynamics characteristics of a vehicle will change significantly. Based on the driving characteristics of vehicles on ISRs, it can be concluded that changes in the braking distance and control direction of vehicles will have an impact on traditional APF algorithms. The specific analysis is as follows.
2.3.1. The Influence on the Gravitational Potential Field
Vehicles should reserve sufficient braking and steering space on ISRs, which can increase the adjustment factor (
αatt) on the original gravitational potential field (
Uatt). The ISR conditions will affect
αatt. The lower the friction coefficient on ISRs, the larger
αatt, and the greater
Uatt, which is the line connecting the vehicle and the target position that points towards the target point. The regulatory factor (
αatt) and the gravitational potential field (
Uatt) are represented as follows:
In this formula, Dl represents the longitudinal braking distance on a normal road surface (m) and Dc represents the lateral displacement value on a normal road surface (m).
2.3.2. Influence on Repulsive Potential Field
The repulsive potential field is generated using several obstacles in the environment, and its shape resembles a “high ground” in the potential field. A judgment coefficient (
αrep) is added to the original repulsive potential field function (
Urep). The judgment coefficient (
αrep) and the repulsive potential field function (
Urep) are expressed as follows:
In Formula (18), the value of αrep is influenced by the iciness and snowiness of the road surface. The lower the friction coefficient of the ISR surface, the larger the value of αrep and the greater the space reserved for judging conditions, thereby avoiding collisions with obstacles.
2.3.3. The Impact on the Resultant Potential Field
The combined potential field
U*(
X) is obtained by overlaying the gravitational potential field (
) and the repulsive potential field (
) on the icy and snowy road surface.
As shown in
Figure 4, for the improved APF algorithm that was constructed, a one-way, three-lane-road-environment APF was drawn. The potential field at the centerline of each lane is the lowest, so it can guide vehicles to travel in the middle of the lane. In order to prevent vehicles from exiting the lane, the potential field at the road boundary is the highest, and it grows faster as it approaches the boundary. The potential field at the lane boundary is between the centerline of the lane and the outer boundary, meaning that vehicles can pass through the lane boundary when changing lanes but cannot drive on the lane boundary for a long time.
2.4. Path Smoothing and Dynamic Planning
Curve fitting was performed on the discrete local optimal reference path points generated via the APF to ensure the smoothness and continuity of the autonomous driving path. Due to the simple structure, low computational complexity, and continuous curves of polynomials, this article used a fifth-degree polynomial to fit the lateral displacement and deflection angle of vehicles. The specific formula is as follows:
In the formula: a and b are both undetermined coefficients, ; .
When the obstacle vehicle and the target vehicle move together, the planned path of each sampling point is a local target path. The real-time vehicle location and road environment information are collected by setting a fixed sampling time interval. Each time, the vehicle path is re-planned and updated to achieve the dynamic planning of autonomous vehicle paths.
Figure 5 is a schematic diagram of the dynamic path planning when the target vehicle overtakes.
2.5. The Process of APF Algorithm in an ISR Environment
The process of the APF algorithm under ISR environment conditions is as follows:
Step 1: Load the drawn road map;
Step 2: Initialize vehicle-related parameters, including the starting point, target point, initial direction, vehicle size, maximum speed and acceleration, repulsion influence range, safety distance range, repulsion force proportion factor, etc.;
Step 3: Before path planning, first check the legitimacy of the starting point and target point. If the location is set in an obstacle, it will definitely not be able to reach that state, and the planning is canceled;
Step 4: After confirming that the starting state and target state are both legal, detect whether the target has been reached each time. If the target has been reached, the planning will end. If the target has not been reached, continue with the next step of planning;
Step 5: Substitute the mathematical model of the improved APF algorithm to calculate the vector size and direction of the repulsion force based on the number of obstacles, distance, angle, etc. Also, calculate the vector size and direction of gravity. Finally, the direction and magnitude of the entire synthetic force are obtained;
Step 6: Calculate the vehicle’s next forward direction, forward speed, forward distance, etc., based on the magnitude and direction of the synthesized force, and drive the vehicle forward;
Step 7: Detect whether the target point has been reached. If not, continue to plan according to the process until the target point is reached.
4. Conclusions
In this paper, we proposed an improved artificial potential field algorithm to improve the efficiency and accuracy of autonomous vehicle path planning in an ISR environment. The reliability of the model was verified by comparing the vehicle planning trajectories at different speeds and under different obstacle avoidance conditions.
Considering the driving characteristics of vehicles on ISRs, the gravitational field and repulsive field models of the traditional APF algorithm were improved by adding adjustment factors and judgment coefficients. The improved APF algorithm proposed in this paper can plan a smooth lane change and overtaking path, effectively avoid obstacle vehicles, and guide autonomous vehicles to drive safely and stably.
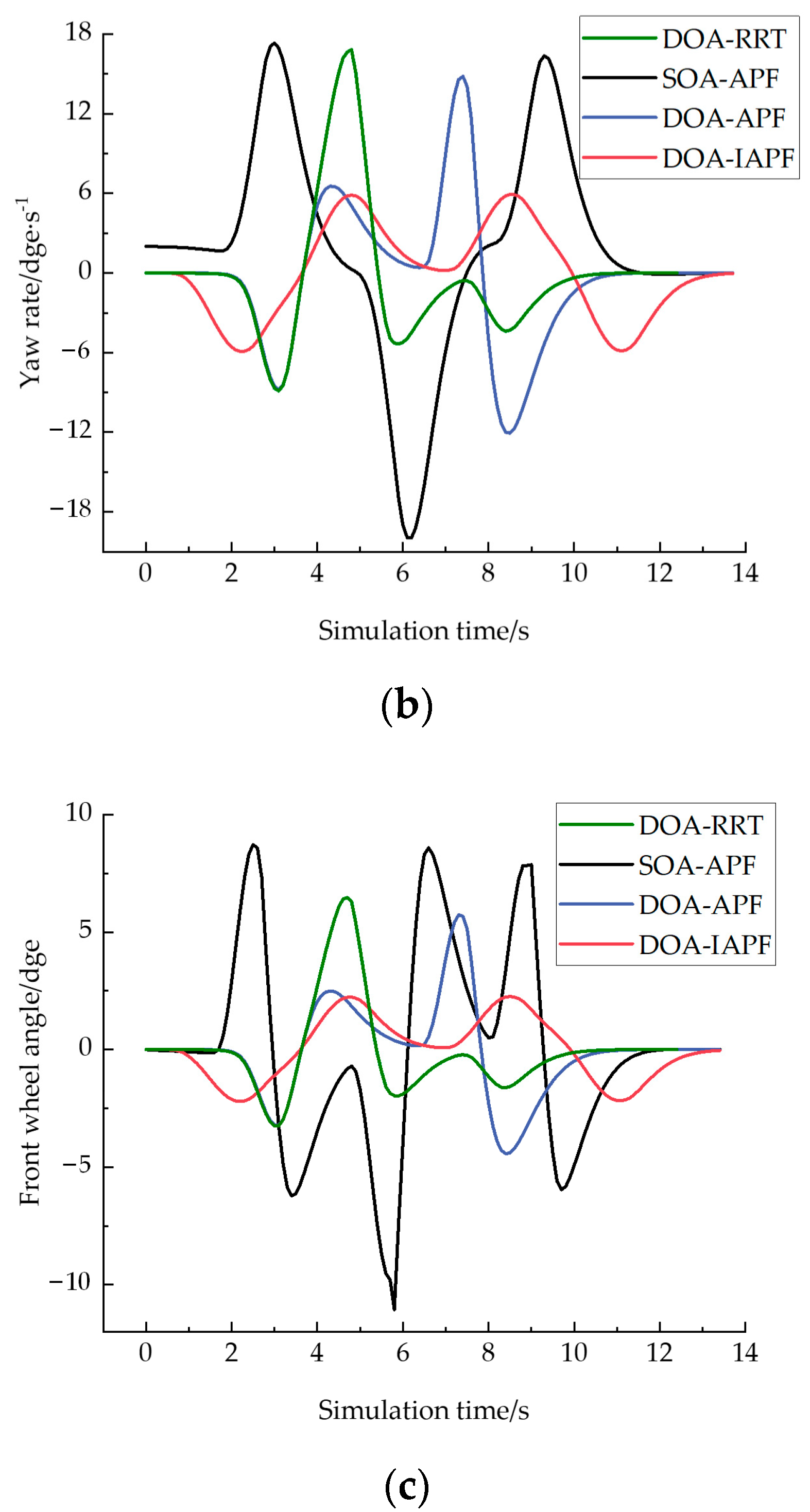
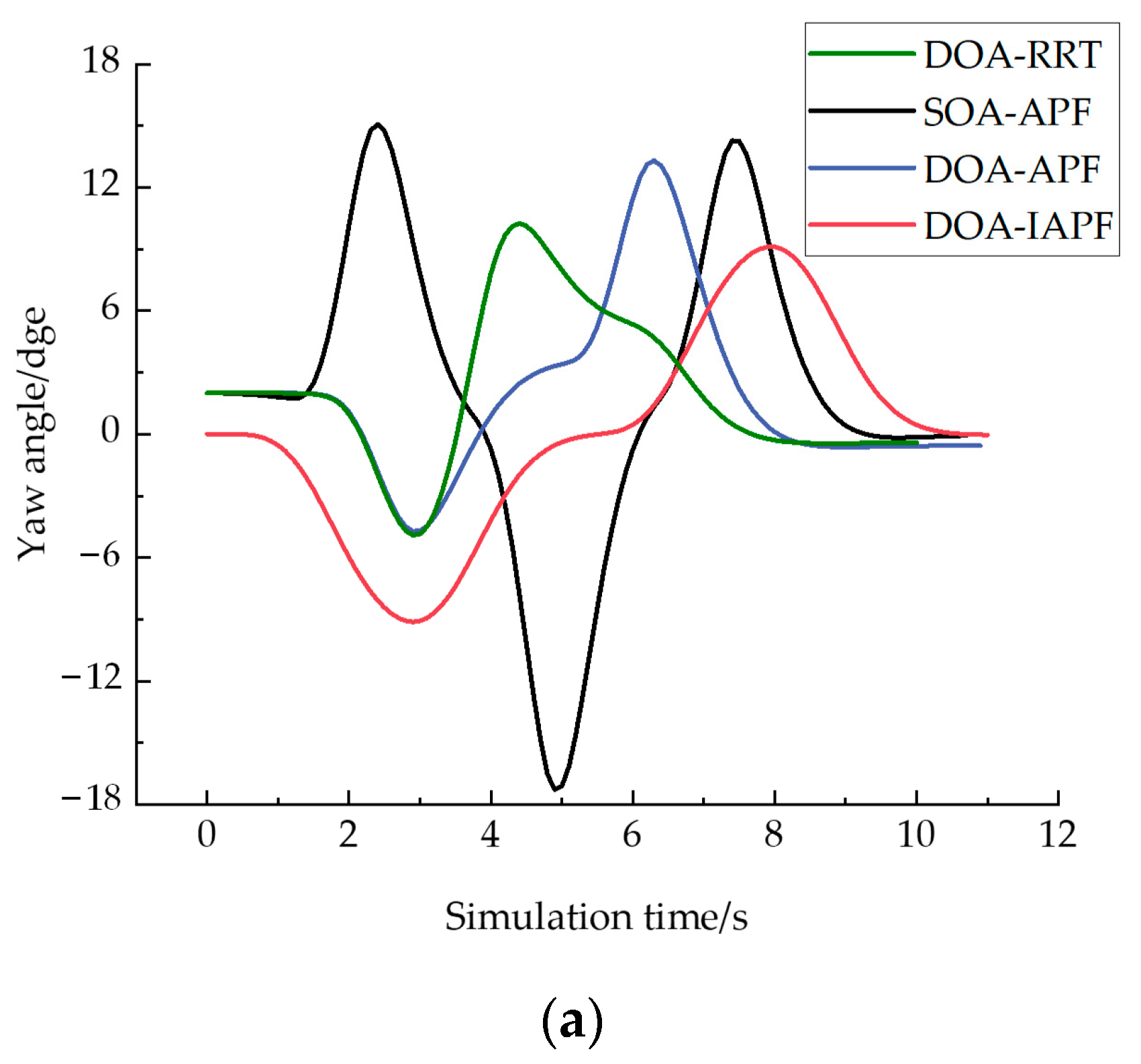
The effectiveness of the improved APF algorithm was verified by comparing it with the traditional APF algorithm under dynamic planning path and vehicle conditions. The results show that, compared with the static obstacle avoidance and dynamic obstacle avoidance of the traditional APF algorithm, the trajectory of the dynamic obstacle avoidance path planned using the improved APF algorithm was smoother, and there was no mutation.
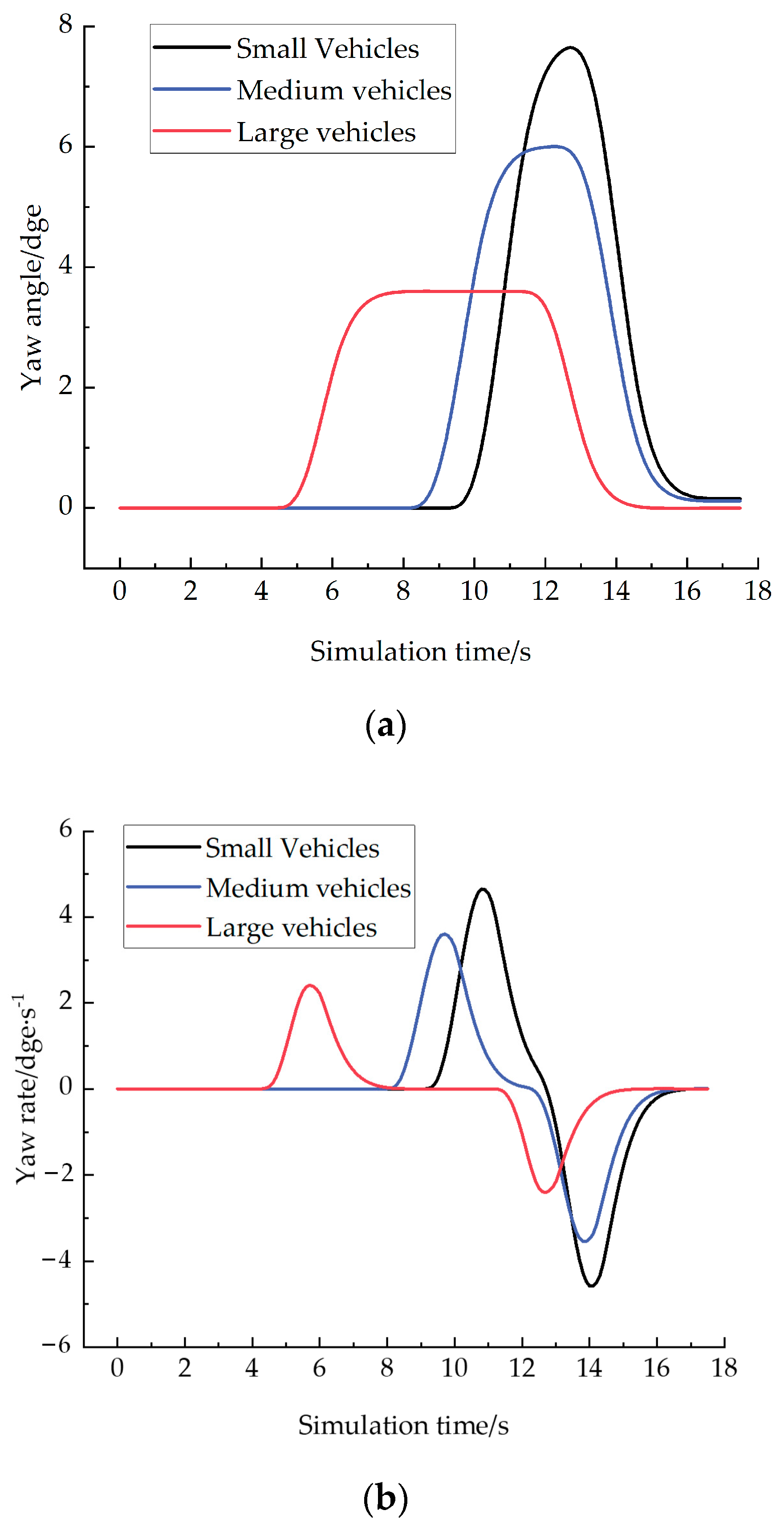
The obstacle avoidance accuracy and efficiency of autonomous vehicles for different obstacle models were analyzed. The results show that the improved APF algorithm can generate different planning paths for different types of obstacle vehicles and can safely and effectively guide an autonomous vehicle to complete obstacle avoidance and lane changes.
Future work will consider more complex traffic scenarios, as well as different driving styles for decision-making and motion planning. For example, the article’s assumption was that the motion state of the obstacle vehicle remained unchanged. We did not consider a situation in which a car was driving around a bend and the movement status of obstacle vehicles changed randomly. For more complex driving environments, such as multiple lanes, unsignalized intersections, and roundabouts, the reliability of the algorithm needs to be verified by considering different driving environments. At the same time, the speed required in this paper was manually preset. If the required speed can be determined according to different driving conditions and driving styles, the APF algorithm can be further improved. In addition, it is necessary to test the motion planning performance of the improved APF algorithm in a real scene through a real vehicle platform, which will be the focus of future research.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}