1. Introduction
In the past few years, the use of non-renewable energy sources has resulted in serious environmental pollution. Hence, finding renewable energy sources has become an imminent task. Among all the alternative energy resources, sun-powered energy as an abundant and clean source of power has been extensively applied in photovoltaic (PV) power generation [
1]. Furthermore, the reduction in the manufacturing costs of PV modules and the improvement in equipment efficiency in PV systems have led to an increase in applications [
2]. However, under normal conditions, the conversion of light-to-electricity efficiency of PV cells is barely around 11–28%, which restricts the development of PV systems [
3]. To increase the output power, it should remain steady at the Maximum Power Point (MPP) for the PV systems. Hence, maximum power point tracking (MPPT) techniques are the crucial concerns of solar PV systems.
Classic MPPT techniques, including hill climbing (HC) [
4,
5,
6], open circuit voltage (OCV) [
7], incremental conductance (INC) [
8], perturb and observe (P&O) [
9,
10,
11], and constant voltage (CV) [
12,
13], are widely used due to their low complexity and cost-effectiveness. These algorithms are effective in uniform irradiation conditions and can accurately track the MPP [
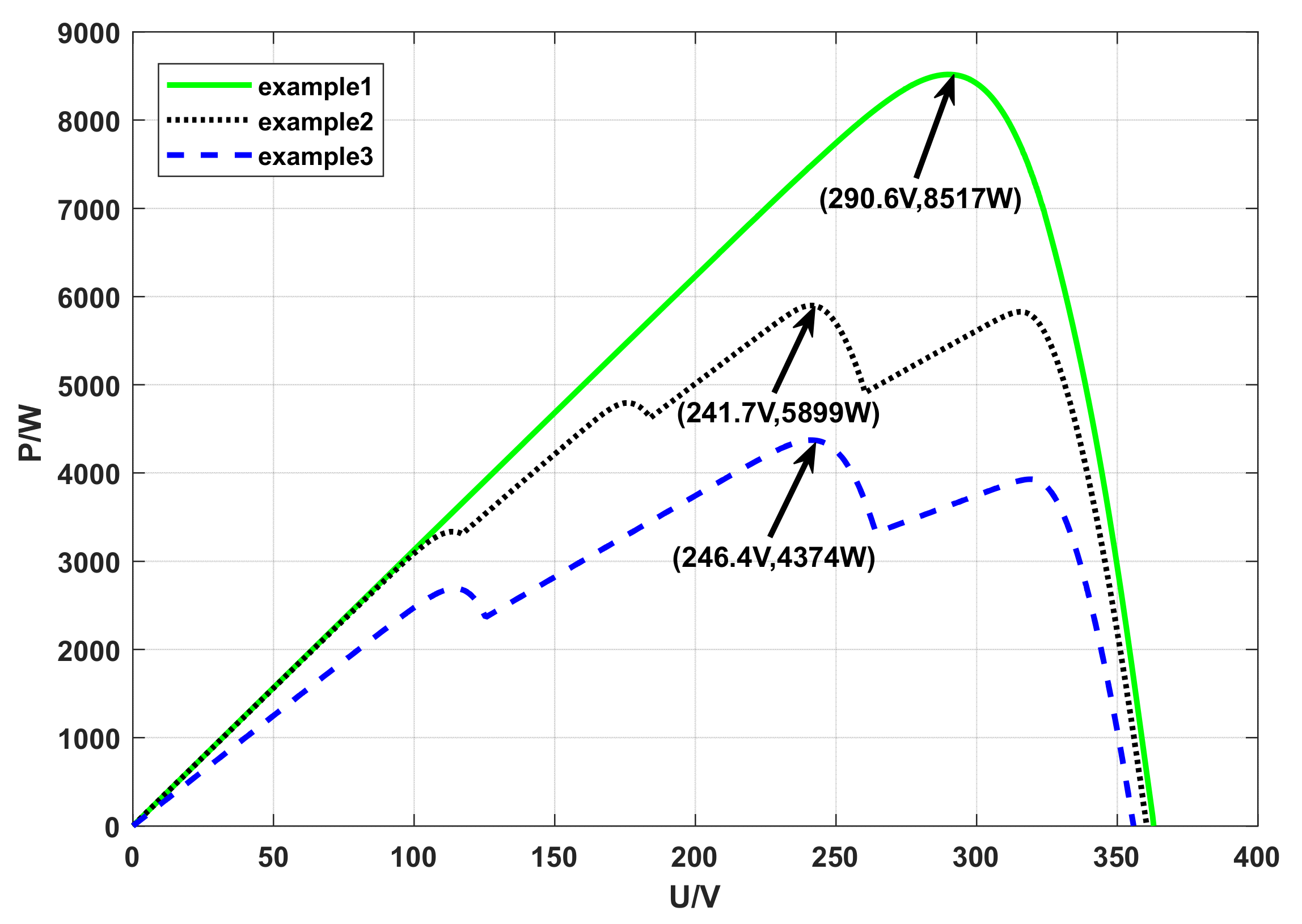
14]. However, they may experience oscillations when searching around the MPP, resulting in slow convergence and power loss. Moreover, classic MPPT algorithms have a limited capacity to respond quickly to changes in shading conditions, preventing them from effectively tracking the MPP. As a matter of fact, the output power for solar PV systems can be influenced by environmental and weather factors such as the shadows of trees, buildings around the PV power station, moving clouds, and temperature. This situation is defined as partial shading conditions (PSCs), where each PV panel may simultaneously encounter differing solar irradiance and temperatures. Under different PSCs, PV systems exhibit nonlinear power–voltage (P-V) characteristics with multiple peaks of power [
15]. These peaks correspond to local maximum power points (LMPPs), with a sole global maximum power point (GMPP) also present. The conventional MPPT algorithm has many problems in PSCs. The problems include failing to jump out of the LMPP, low optimization efficiency, and inaccuracy. In recent years, many scholars have effectively solved the problem of tracking GMPP through the utilization of metaheuristic optimization methodologies, with examples such as the ant colony optimization algorithm (ACO) [
16], grey wolf algorithm (WOA) [
17,
18], firefly algorithm (FA) [
19,
20], artificial bee colony algorithm (ABC) [
21,
22], etc.
The particle swarm optimization (PSO) algorithm [
23] is extensively used in the field of MPPT. The PSO algorithm has the advantages of low memory requirement and comparatively fast convergence speed. In the reference [
24], a novel approach was proposed where each PV module was treated as a particle, and the MPP was considered as the moving element. Compared with the P&O method, this method improved the efficiency by over 12% in the transient state. The modified PSO (MPSO) method was proposed for a multilevel inverter-based PV system in the reference [
25]. This MPSO method introduced cognitive components and worst-experience social components to enhance the speed of searching for the MPP. A combination of the modified PSO and P&O methods in the reference [
26] was applied. This method used the adaptive sensitivity parameter to detect the GMPP and tracked GMPP faster and more accurately. An MPV-PSO algorithm based on modified particle velocity of PV systems under PSCs was discussed in the reference [
27], which achieves a balance between adaptive and deterministic features. Moreover, it could solve problems like particles getting trapped in LMPPs. A logarithmic particle swarm optimization (LPSO) method in PV systems was proposed in the reference [
28], which updates particle velocity solely based on the direction of the GMPP. It should be noted that the PSO algorithm requires multiple iterations to converge. Furthermore, the main drawback of the PSO algorithm is that it frequently tends to adhere to the first local peak rather than effectively tracking the dynamic movement of the global peak, particularly when shading conditions vary over time.
In 2018, the Butterfly Optimization Algorithm (BOA) [
29] was presented by the authors Arora and Singh. The BOA has been widely recognized for its strong search capabilities and effectiveness in converging toward the global maximum point with a high degree of accuracy. It has been extensively discussed by many scholars. For instance, the work in [
30] is presented to validate the proposed chaotic algorithm on single mode, multimodal, and engineering design problems. The work in [
31] has been proposed to optimize the analysis of annual cost, energy consumption, energy efficiency, and pollutant reduction. Despite numerous applications of the BOA in various areas, such as microgrid optimization scheduling, parameter adjustment, and other domains, its application in MPPT is still relatively limited. In the reference [
32], the BOA method was applied to PV systems with the aim of mitigating the negative impact of shading and improving the tracking speed. A modified version of the BOA was proposed in the reference [
33], which used a single dynamic variable as the tuning parameter, resulting in reduced algorithm complexity. In the reference [
34], a method was presented to solve power point fluctuations between GMPP and LMPPS, leveraging an opposition-based reinforcement learning methodology in conjunction with the BOA. Based on the above research, it can be found that there exist some deficiencies in the BOA, such as long convergence time, as well as large oscillations during optimization.
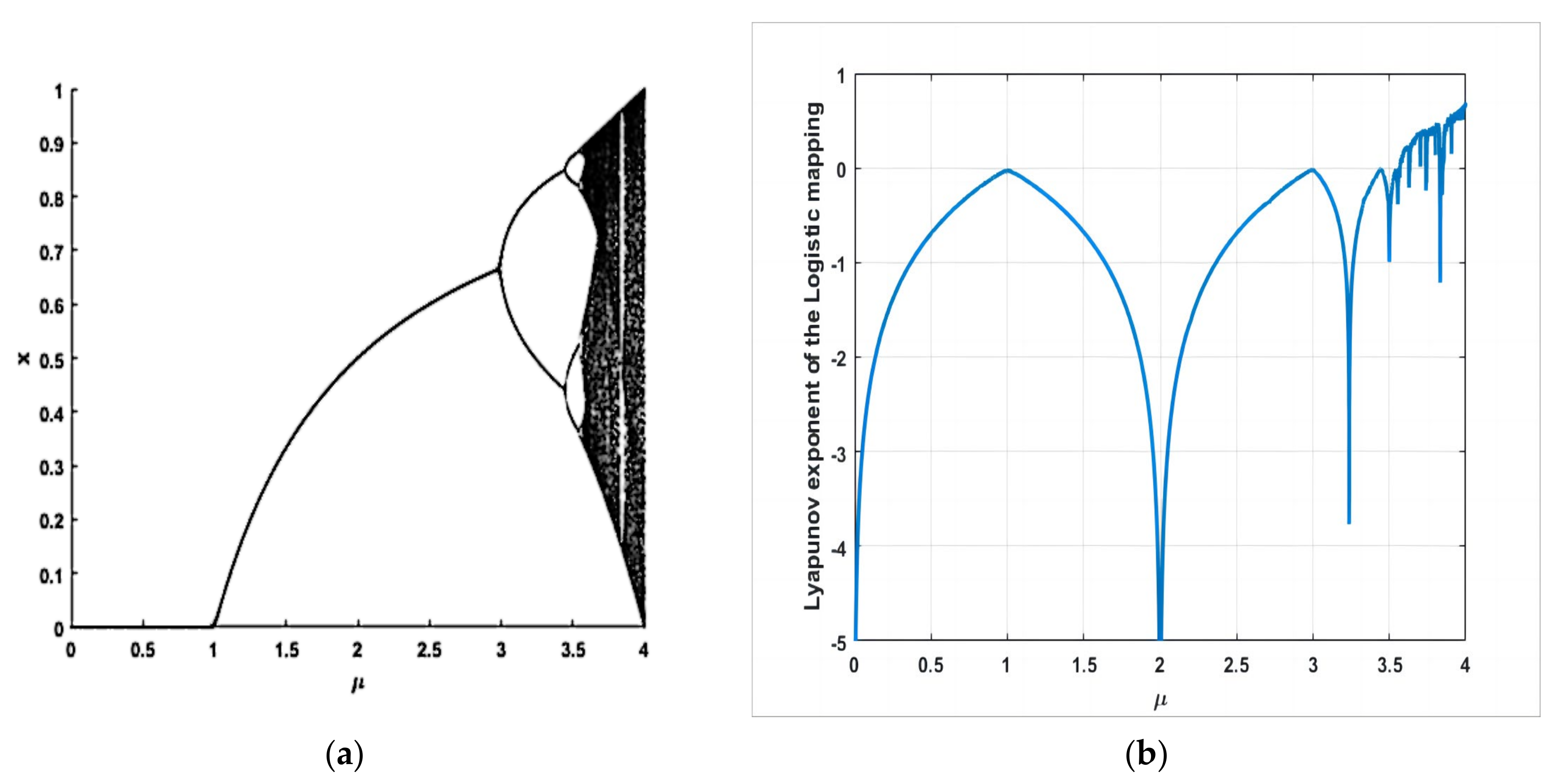
Motivated by the research mentioned above, this paper introduces an innovative PSO-BOA algorithm for solving the slow convergence issues in the BOA while incorporating the advantages and strong robustness of the PSO algorithm. Compared to the traditional PSO and BOA methods, the proposed PSO-BOA algorithm effectively combines the benefits of both approaches while overcoming their respective shortcomings, such as the low convergence accuracy of PSO and the slow convergence and large oscillation of the BOA. Under PSCs, the PSO-BOA algorithm demonstrates remarkable accuracy in tracking the GMPP, exhibiting superior tracking speed, efficiency, and reduced oscillation. With the goal of enhancing the optimization performance of the PSO-BOA algorithm, this article introduces two modifications: a control parameter of sensory modality based on logistic mapping and the self-adaptive adjustment of the inertial weight. The simulation results suggest that the proposed algorithm effectively addresses the shortcomings of existing MPPT algorithms and offers a promising alternative for practical application in various renewable energy systems.
The subsequent sections of this article are structured as follows:
Section 2 provides an overview of the multi-peak output characteristics under PSCs.
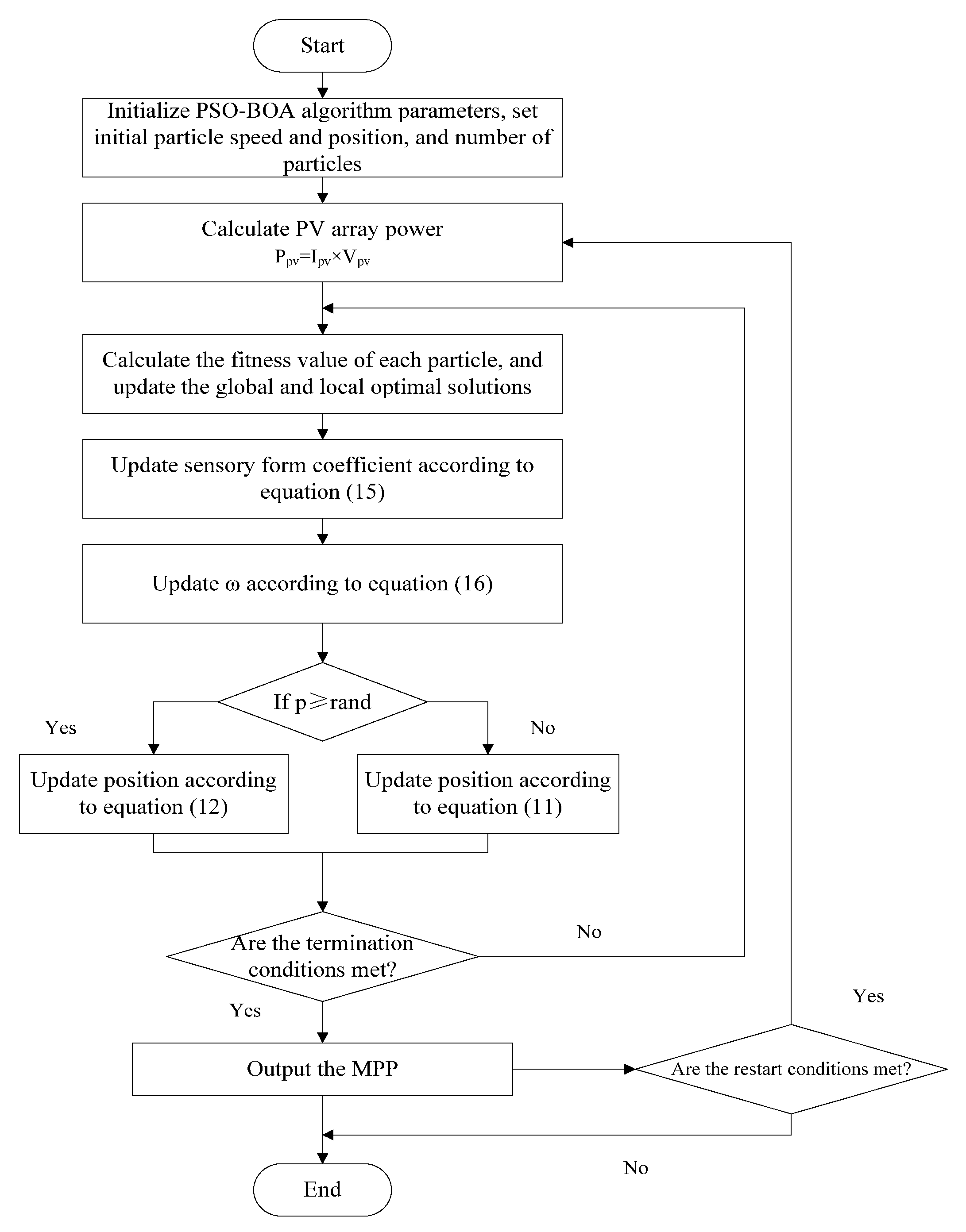
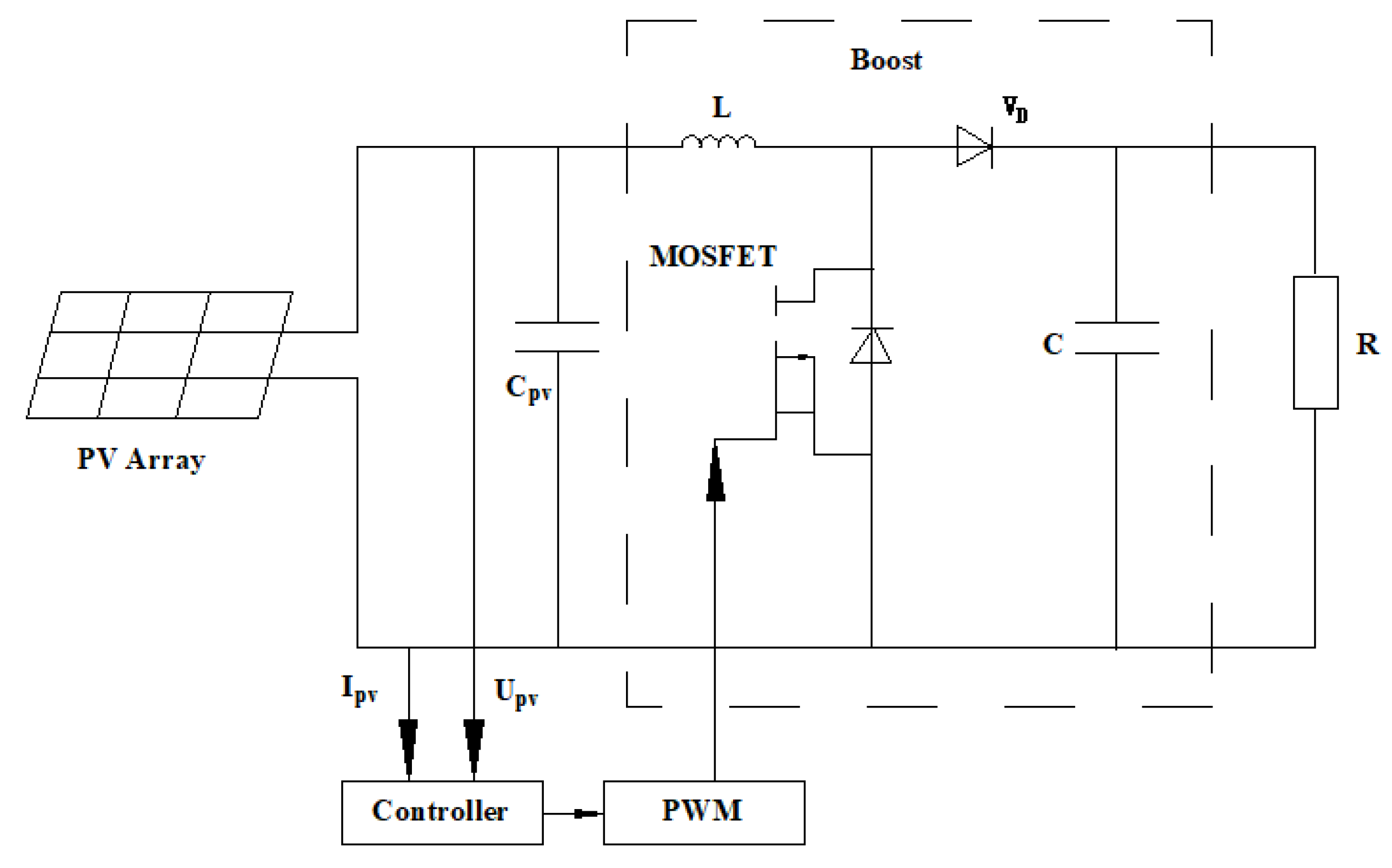
Section 3 introduces the PSO-BOA algorithm utilized to control the PV system.
Section 4 presents an analysis of the simulation results from MPPT techniques based on PSO-BOA, BOA, and PSO, respectively. Finally,
Section 5 provides a summary of the key findings discussed in this paper.
5. Conclusions
In response to the issues of low tracking accuracy and susceptibility to local optima in classical PSO algorithms, as well as the problems of slow convergence speed and large oscillation in the BOA, this study introduces a novel PSO-BOA algorithm based on the PSO and BOA. The paper simulated four different scenarios, and the simulation results demonstrate that the PSO-BOA algorithm outperforms the PSO and BOA in terms of convergence accuracy, with a tracking accuracy of no less than 99.94%. In contrast, the PSO algorithm is prone to becoming trapped in local optima, resulting in a convergence accuracy of only 96.96% when both irradiation and temperature undergo abrupt changes. The PSO-BOA algorithm also surpasses both the PSO and BOA algorithms in handling oscillations. In terms of convergence time, the PSO-BOA algorithm shows a significant improvement. Particularly, in scenarios of abrupt changes in irradiation and simultaneous changes in temperature and irradiation, the convergence time of PSO-BOA is less than 0.5 s, while the BOA takes approximately double the time compared to the PSO-BOA. Moreover, the convergence time of the PSO algorithm is relatively longer, and it tends to converge quickly but may be trapped in local optima. Therefore, the proposed algorithm exhibits faster convergence speed, higher tracking accuracy, and smaller oscillations compared to both the PSO and BOA algorithms, which can effectively enhance power supply reliability and safety.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}