1. Introduction
With the research boom of renewable DC power sources, research on DC microgrids is gradually expanding. Because of the obvious advantages of DC microgrid technology, its application in the field of vehicle power system is becoming more and more extensive. In the DC microgrid of electric vehicles, converters are often used to realize voltage conversion between the DC bus and load. For DC power systems, maintaining the stability of the DC bus voltage is the foundation for ensuring the stable operation of vehicles. The application of a large number of power conversion devices subject to strict closed-loop control leads to an increase in the proportion of constant power loads in the system, which greatly reduces the stability of the system when the power of such loads fluctuates [
1]. The research shows that the constant power load always exhibits negative-impedance characteristics and brings an instability effect to the system. The negative-impedance characteristics of a constant power load can cause significant voltage oscillations in the system when there are significant changes in the CPL (constant power load), thereby reducing power quality and posing safety hazards [
2,
3].
Therefore, how to keep the DC bus voltage of electric vehicles quickly adjusted and stable is the key problem with the DC microgrid. The DC microgrid of electric vehicles is a system composed of many parts, its instability phenomena are various, and the mechanism of the system instability is also complicated. Since most distributed power generations, energy storage devices, and loads in the DC microgrid need to be connected with the DC bus through converters, and these power electronic converter devices have nonlinear characteristics, the power electronic system composed by them also has nonlinear characteristics [
4].
In practical applications, the system model will be affected by various disturbances, such as the uncertainty of inductance and magnetic characteristics, the instability of input voltage, the disturbance of load, etc. At present, many advanced nonlinear control methods have been applied to the converter, such as active disturbance rejection control, adaptive control, sliding-mode control, etc. The sliding-mode control has the advantages of simple operation, high precision, good stability, and robustness in practical applications. Sliding-mode control technology and a DC-DC converter work well together because they are both based on a variable-switching strategy [
5]. For the SMC (slide-mode control) method, Reference [
6] ensured large signal stability and a fast dynamic response. In order to further improve the transient dynamics of the system, a simple finite-time convergence SMC method is adopted in the converter system [
7,
8]. However, it is difficult to maintain high accuracy in the event of external disturbances or changes in internal components. Therefore, modern advanced control methods are studied, such as sliding-mode control, adaptive control, optimal control, predictive control, etc. The above control method basically solves the problem of output-voltage instability. However, these methods cannot quickly track and suppress interference. For closed-loop systems, it is difficult to achieve a good voltage output performance under interference.
Considering the perturbations and uncertainties existing in practical applications, it is difficult to measure them with actual sensors, but the designed observer can achieve accurate estimation and compensation of perturbations. In Reference [
9], an expanded state observer was designed to realize the estimation of load changes, and a sliding-mode controller was designed to improve the anti-interference performance of the system. Reference [
10] designed the unknown input observer, which has low sensitivity to noise and only needs to adjust one parameter, which is easy to implement in the actual system. Reference [
11] proposed a sliding-mode control method based on the disturbance observer, which can converge to the neighborhood near the reference voltage in a finite time. However, the above observer can only accurately estimate the slow time-varying perturbations [
12]. The perturbations in the actual system are more complex, and there may be higher-order polynomial perturbations. Reference [
13] proposed a passive controller based on interconnection and damping allocation, which is robust and easy to implement. However, it can lead to a slow transient response.
In Reference [
14], the GPI (generalized proportional integral) observer was designed to achieve an accurate estimation of slow and fast time-varying disturbances, and it was combined with the backstepping method to deal with the unmatched load disturbance. The basic idea of the backstepping method is to decompose a complex system into multiple subsystems, which are recursive from backward to forward through the design of the virtual control law. Interference factors are designed into each subsystem, but in the design process, there may be a high-order derivative of the virtual control function in the controller, which is more complicated to calculate.
In these controllers, in order to maintain the stability of the output voltage, the switch gain is required to be greater than the upper limit of the disturbance. However, in some low-order sliding-mode control laws, an excessive switching gain can lead to significant voltage fluctuations, resulting in unstable output voltage in the practical-implementation literature [
15,
16]. The interference estimation and compensation technology provide a feasible method to alleviate the chattering phenomenon in Reference [
17]. In Reference [
18], the nonlinear disturbance observer was used to estimate the uncertain power change, which provides a new way of thinking for dealing with CPL problem. It is difficult for the observer to obtain satisfactory estimation accuracy when dealing with a fast time-varying CPL. There is also no consideration of supply voltage fluctuations. Performance degradation is caused by these factors. Reference [
19] proposes a distributed current-sharing control method. The outer loop is the voltage droop control with the purpose of embedding virtual impedance, while the inner loop is the PI control, which can improve the dynamic and steady-state performance of the system. References [
20,
21] compensated for the virtual impedance coefficient by actively detecting line impedance to achieve current equalization, and they improved the voltage drop through voltage observer feedforward compensation control. Reference [
22] proposed an algorithm for compensating for a current imbalance caused by resistance mismatch. By perturbing the duty cycle of one phase and measuring the deviation of other phase duty cycles, the degree of parameter mismatch is estimated, and current balance is achieved through appropriate compensation coefficients.
There are many effective error estimation methods, including the unknown input observer (UIO) [
23], disturbance observer (DOB) [
24], and extended state observer (ESO) [
25]. The disturbance-observer-based control (DOBC) has been proven to effectively reduce unknown external disturbances and system uncertainty. Due to the fact that these observer techniques are model based, a large amount of information needs to be considered when establishing interference observers. However, both DOB and ESO can only estimate constant and stage constant perturbations and cannot estimate polynomial perturbations.
Due to the uncertainty of converter parameters and the influence of concentrated disturbances, there is an increasing amount of research on the precise estimation of disturbances, using the estimated values as feedforward compensation to improve the anti-interference performance of control. Disturbance-observer-based control (DOBC) considers the parameter changes, load changes, and input voltage fluctuations of the filter as external disturbances to the system. The disturbance observer is used to nominal the controlled object and observe these disturbances through the disturbance observer. The observed values are then fed forward to the output of the voltage control loop to counteract the impact of disturbances on the system. Another disturbance estimation technique is the extended state observer (ESO), which treats both internal uncertainties and external disturbances as total disturbances, treats the total disturbance as a new system state, estimates the system state and disturbances through internal calculations, and then designs the controller by combining the estimated values with the improved sliding-mode control method, so that the output voltage of the converter can track the reference signal quickly [
26].
In order to suppress load resistance interference and input voltage changes, an SMC method based on GPI observer for three-phase interleaved parallel DC/DC converter is proposed. Estimate the disturbance and state of the system by designing a GPI observer [
27]. Then, based on the estimated values obtained from the GPI observer, a composite controller is constructed using SMC technology, which enables the output voltage to asymptotically track the reference voltage [
28]. The simulation results show that, compared with the sliding-mode control method based on NDO, this control method can track the reference value faster and improve the steady-state performance of the system. Meanwhile, this method reduces costs in practical systems.
The GPI observer sliding-mode control method based on the second-order sliding-mode algorithm proposed in this article can achieve small switching gain without sacrificing interference suppression by combining interference estimation, ensuring the stability of the output voltage. Compared with other observer control methods, it has strong robustness against disturbances.
The main work content of this paper is divided into three parts:
The stability of three-phase interleaved parallel DC/DC converter supplying CPL in electric vehicle DC power system is analyzed, and its mathematical model is established.
The sliding-mode control strategy based on the GPI observer can effectively reduce the switching gain by compensating the lumped disturbance accurately.
Through the simulation study of MATLAB/Simulink in the interference of input voltage and CPL power and the evaluation of the proposed composite controller, the correctness of the proposed controller is proved.
2. Stability Analysis of DC Power System for Electric Vehicles
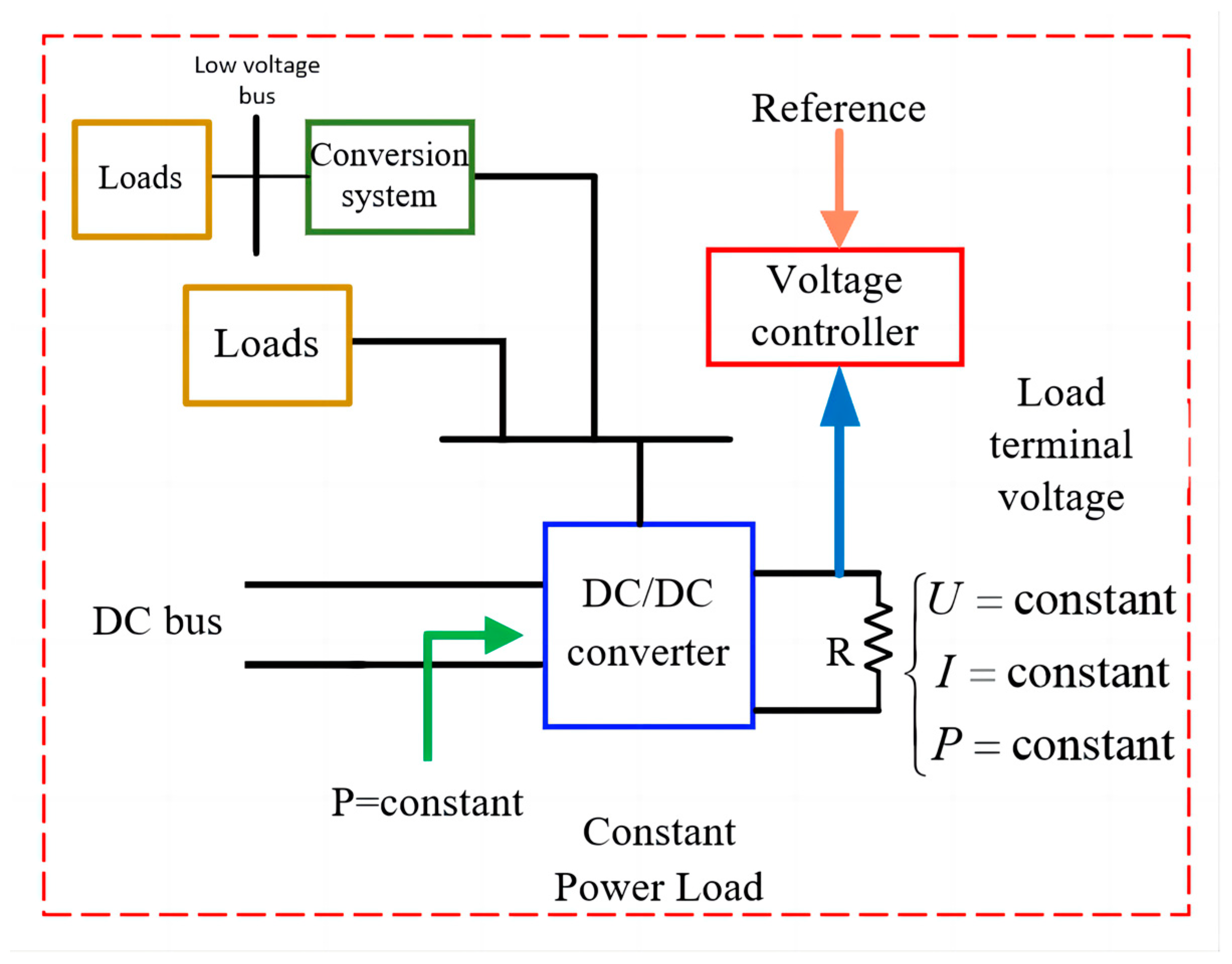
The DC power system of electric vehicles is mainly composed of a power generation unit, generator set, energy storage unit, AC/DC load, and power converter connected to each unit module. As shown in
Figure 1, in a power generation unit, the energy flows in one direction, the battery is connected to the DC bus by a DC/DC converter, and the generator set provides energy to the bus by an AC/DC converter.
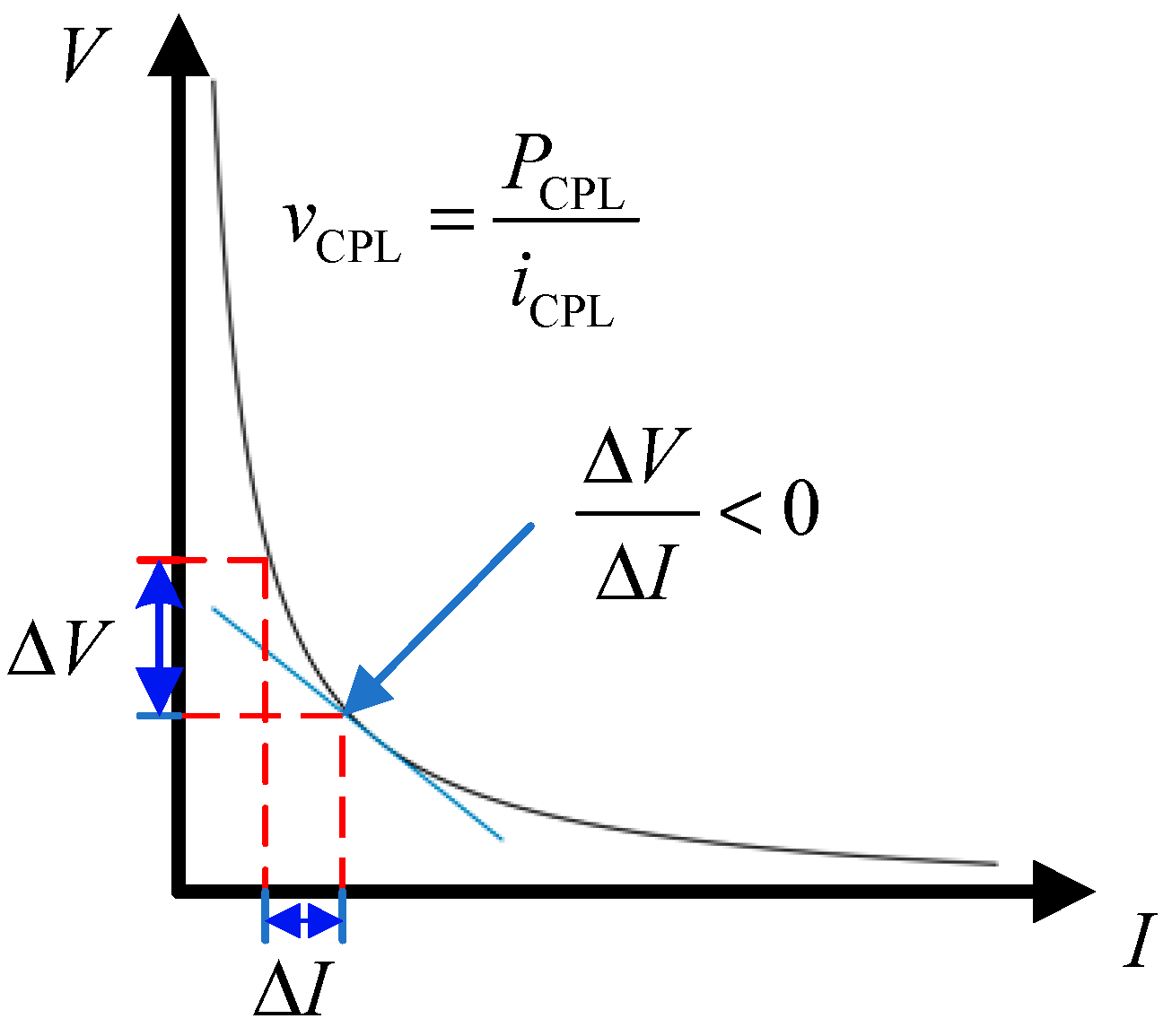
All kinds of power electronic devices in the power system of electric vehicles are connected to the on-board high-voltage power supply system of electric vehicles in the form of a cascade, and most of these power electronic devices adopt closed-loop control; when the bus voltage changes, the output power can remain constant. When the input voltage changes, the input current changes in the opposite trend; constant power load has negative impedance characteristics. It is therefore said to have a negative impedance characteristic (ΔV/ΔI < 0) constant power load.
In a constant power load, P is constant. Thus, as shown in
Figure 2, as the voltage at both ends of a constant power load increases/decreases, its current decreases/increases. Because the incremental impedance of CPL is negative (ΔV/ΔI < 0), in this case, the system will deviate from its stable region, resulting in CPL negative impedance instability [
29]. Interaction with other devices may affect the dynamic characteristics and stability of the system.
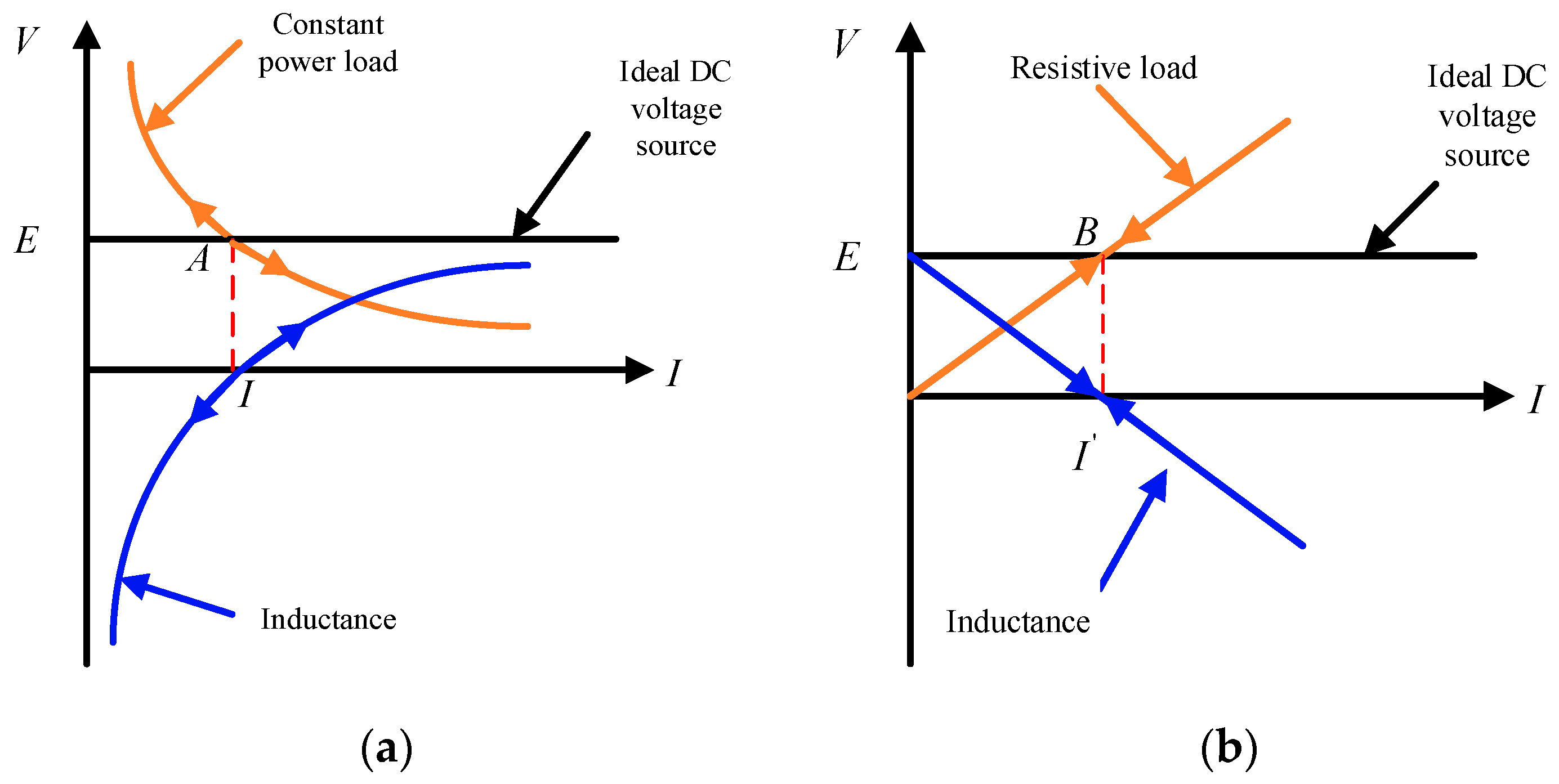
As shown in
Figure 3a. The midpoint is the initial stable operating point of the system. When the system is subjected to external disturbances causing an increase in the input current of the CPL, as can be seen from
Figure 3a, the voltage at both ends of the CPL is at this time, and according to KVL, the voltage at both ends of the filtering inductor is at this time. At this point, the inductance current will further increase, causing the system to move away from the stable operating point. On the contrary, when the input current of the CPL decreases due to external disturbances in the system, the voltage at both ends of the CPL is reduced. From KVL, it can be seen that the voltage at both ends of the filter inductor is reduced, and the inductor current will further decrease, thus keeping the system away from the stable operating point. The obtained volt ampere characteristic curve is shown in
Figure 3b for when the load is a pure resistive load, where the point is the initial stable operating point of the system. When external disturbances increase the input current, there is a filter inductance voltage, which can be determined by KVL. At this time, the current will correspondingly decrease, so the system can return to the initial stable operating point; that is, the system is stable. CPL negative impedance was obtained via a small signal analysis [
30]. In Reference [
30], the equivalent model of CPL was extracted through a small signal analysis and a large signal analysis.
In order to analyze the three-phase interleaved parallel DC/DC converter system supplying CPL, the conjugated model and circuit were extracted for a small signal analysis. Based on the analysis of Reference [
3], the destabilizing effect and limit of CPL negative impedance on converter were explained. Since the root of the characteristic equation is on the right-hand side, there is negative impedance instability in the output voltage of the system. In addition, the control performance is severely degraded due to the inevitable voltage fluctuations in the DC supply voltage [
31].
According to the research of Reference [
3], through the small signal analysis of the system equation of state, the transfer function of the system can be obtained as follows:
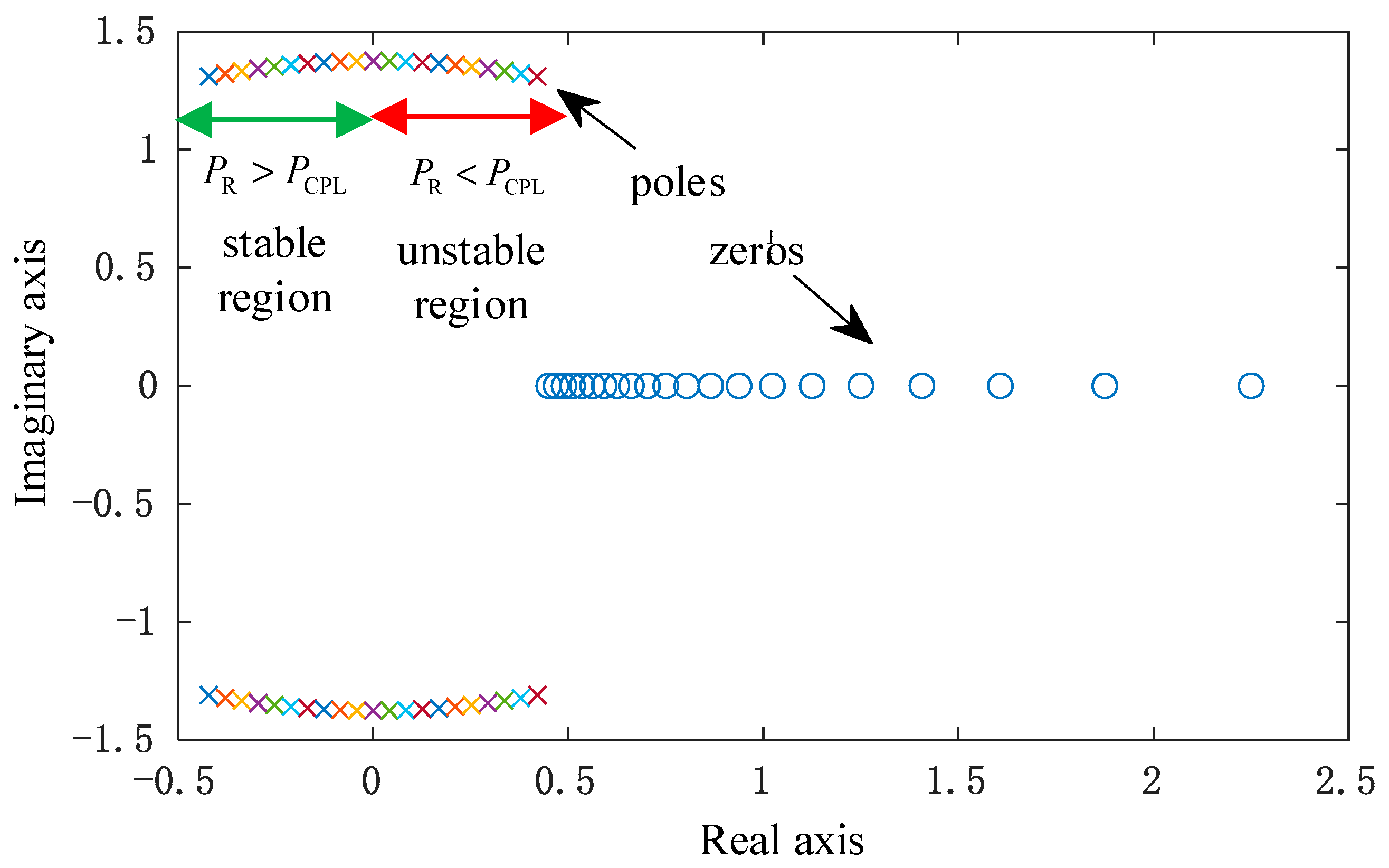
From the transfer function, with the increase of CPL power, the negative incremental resistance characteristic of CPL becomes more obvious, and the root of the system characteristic equation begins to move to the right of the complex plane. As shown in
Figure 4, once the power consumed by CPL exceeds the power consumed by resistive loads, that is,
, CPL plays a dominant role in the system. The damping coefficient of the corresponding system is less than 0, and the slope of the output characteristic curve is negative. In this case, the DC bus voltage will be in an oscillating state. When the power consumption of CPL is less than that of resistive load, that is,
, the resistive load plays a dominant role in the system, the damping coefficient of the corresponding system is greater than 0, and the slope of the output characteristic curve is positive. Under this condition, the DC bus voltage of the system is in a stable state.
In order to elucidate the impact of CPL power fluctuations on the stability of the DC bus voltage, we first introduced some common CPLs in special vehicles and preliminarily analyzed the dynamic characteristics of negative incremental resistance of constant power loads. Secondly, through a theoretical analysis, we found that the power imbalance between the generating and receiving ends is the fundamental cause of bus voltage fluctuations. Then, based on small signals, the reason for the low-frequency oscillation of the DC bus caused by CPL was obtained. Through a simplified circuit analysis of an ideal voltage source, filter inductor, and CPL in series, it was found that when CPL power fluctuates, it amplifies the power fluctuation, causing the system to move away from the initial operating equilibrium point.
3. Modeling of Three-Phase Interleaved Parallel Bidirectional Converter
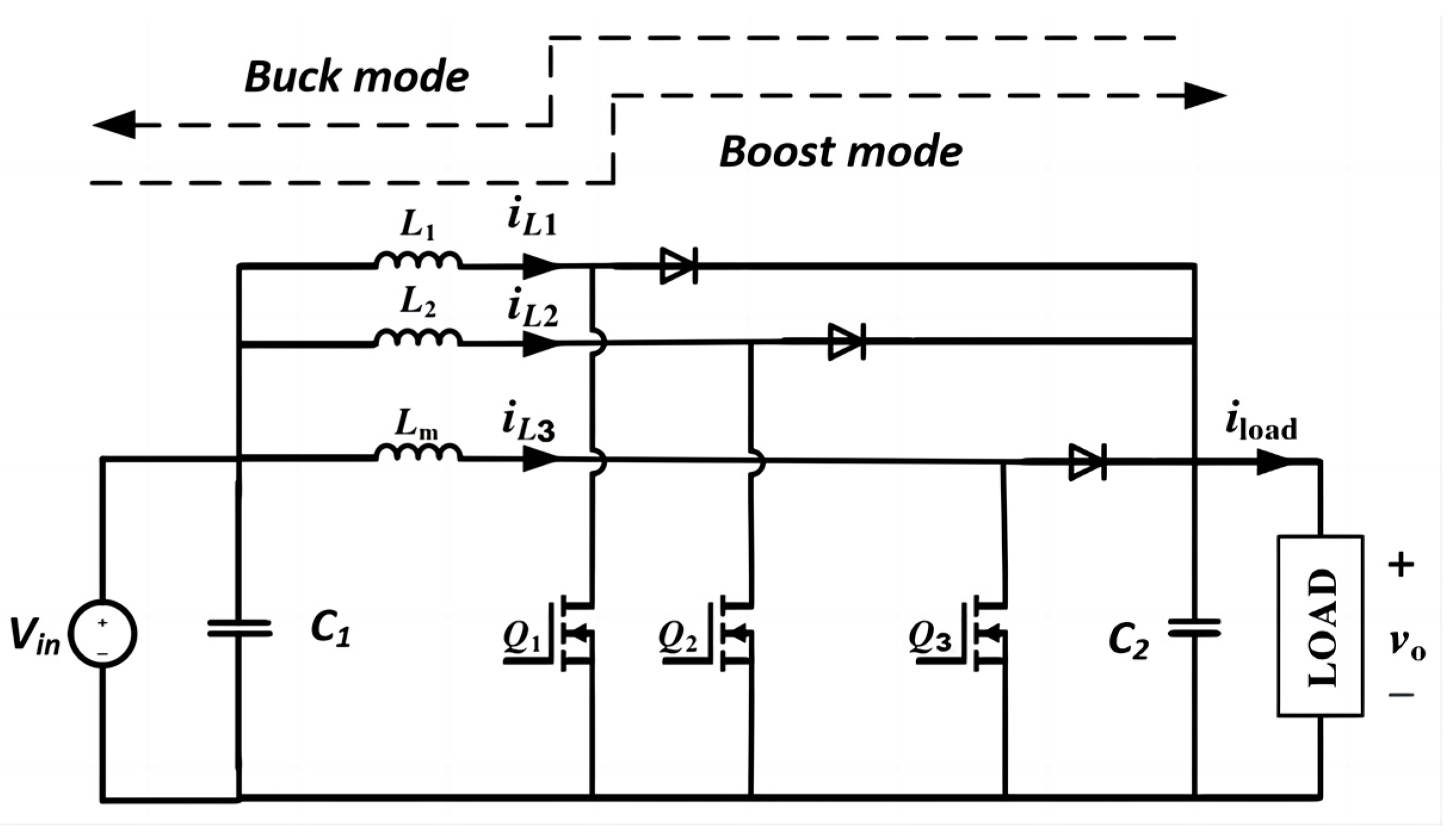
The main circuit topology of the three-phase interleaved parallel bidirectional half bridge DC-DC converter is shown in
Figure 5, consisting of three bidirectional Bucks–Boosts in parallel. In the same switching cycle, only one switch tube is on the upper and lower bridge arms of the half-bridge switch tube. According to the conduction state of the switch tube, there are two states: Boost and Buck. When the energy storage capacitor releases the stored energy to the load end, the input end of the converter can be approximated as a constant voltage source, and the energy flows from the input end to the load end, where the converter is in a Boost state. When the load side needs to store energy, it operates in Buck mode, and the load-side power flows to the input side to charge the energy storage capacitor. The topology parameters of the three-phase interleaved parallel converter are shown in
Table 1.
The advantages of adopting an interleaved parallel structure in bidirectional DC/DC circuits are, on the one hand, under a certain power output, the voltage and current stress of the inductor are reduced, allowing for the selection of smaller inductors, thereby reducing the volume and weight of the converter; and, on the other hand, the difference between the PWM driving waveforms of each phase is 120°, further reducing the input current ripple, reducing the inductance, while also reducing the output voltage ripple and reducing the capacitor voltage and current stress, thus ensuring that the bidirectional DC/DC converter has a higher power density. For the convenience of analysis, if the switching frequency is set to fs and the influence of voltage dead band is ignored, then ws = 2 πfs. Ts = 1/fs.
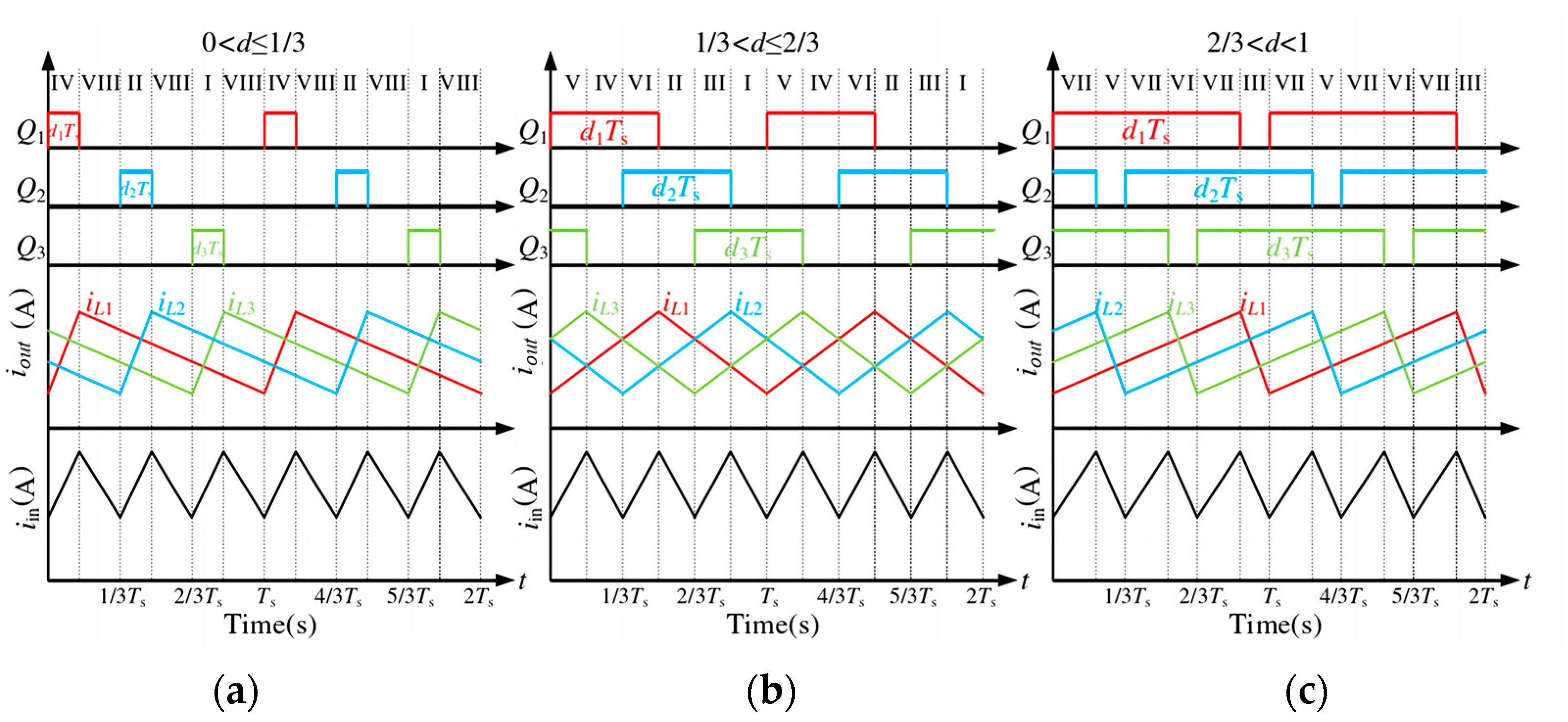
Figure 6 shows the main waveforms of the three-phase interleaved parallel boost converter under different duty ratios, d.
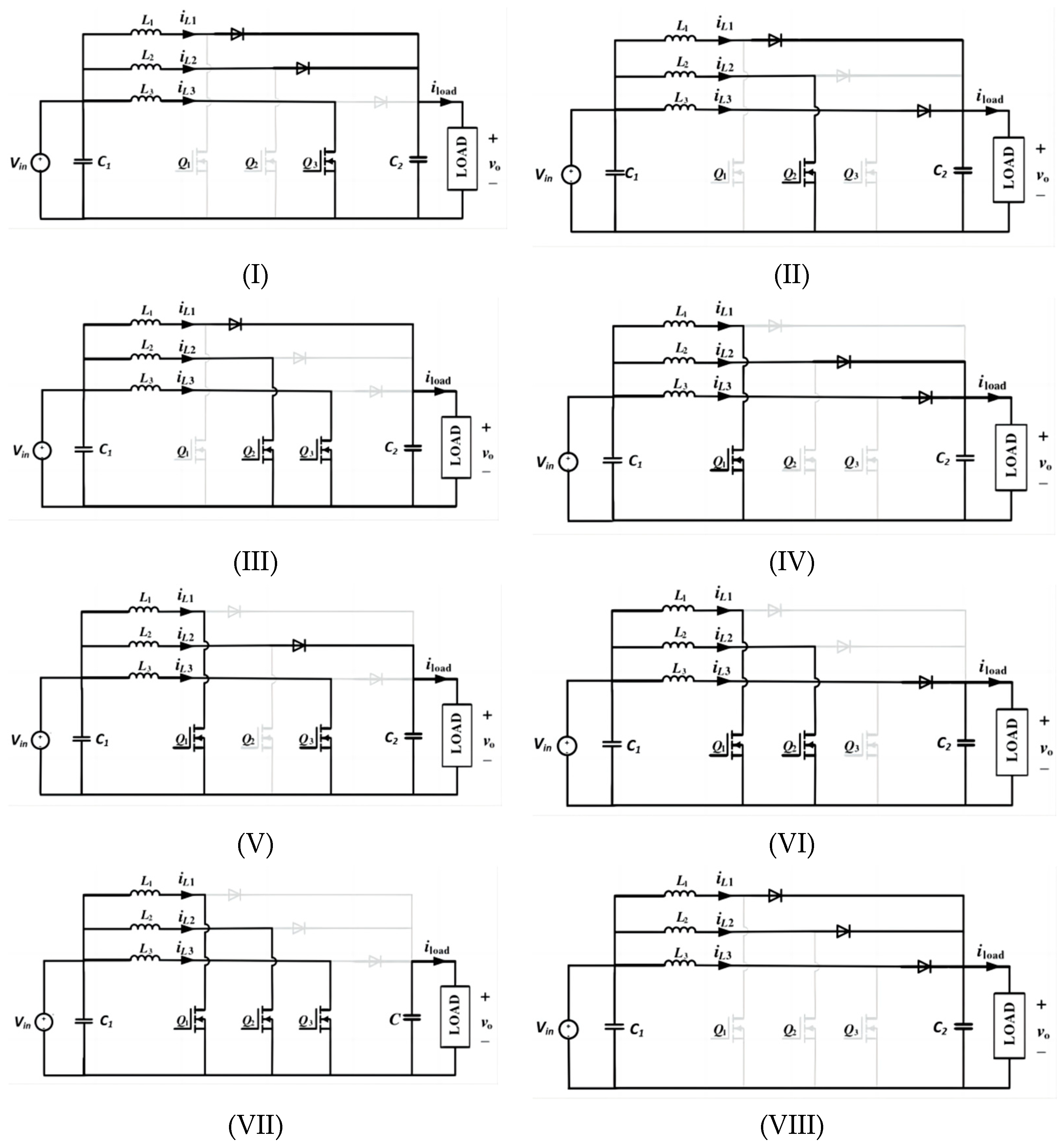
Assuming that the duty cycle, d, of each switch tube is equal and each phase is 120° different in sequence, there are eight switching modes of the converter. Use “1” and “0” to represent the “on” and “off” of the switch tubes, respectively. The switch states of switch tubes Q1, Q2, and Q3 can be represented as corresponding binary numbers: 001 (Mode I), 010 (Mode II), 011 (Mode III), 100 (Mode IV), 101 (Mode V), 110 (Mode VI), 111 (Mode VII), and 000 (Mode VIII).
Figure 7 shows the equivalent circuits with 0, 1, 2, and 3 switch tubes on, respectively.
For the convenience of description, this article takes one of the situations as an example for analysis, while other situations can be analogized. When the duty cycle is 0 < d < 1/3, the converter can be divided into six working modes based on the power switch on/off situation. The driving signal and inductance current waveform of the corresponding switch in the system under these six working modes are shown in
Figure 6a.
Process 1: (Corresponding Mode IV) The switch Q1 is in a conductive state, and the current of inductor L1 continues to increase. The vin end charges the inductor L1, Q2 and Q3 are in the off state, and the current of inductors L2 and L3 continues to decrease. Inductors L2 and L3 discharge towards the vo terminal.
Process 2: (Corresponding Mode VIII) Switch tubes Q1, Q2, and Q3 are in the off state, and the current of inductors L1, L2, and L3 continues to decrease. Inductors L1, L2, and L3 discharge towards the vo terminal.
Process 3: (Corresponding Mode II) The switch tube Q2 is in a conductive state, and the current of inductor L2 continues to increase. The vin end charges the inductor L2, Switch tubes Q1 and Q3 are in the off state, and the current of inductors L1 and L3 continuously decreases. Inductors L1 and L3 discharge towards the vo terminal.
Process 4: (Corresponding Mode VIII) Switch tubes Q1, Q2, and Q3 are in the off state, and the current of inductors L1, L2, and L3 is continuously decreasing. Inductors L1, L2, and L3 discharge towards the vo terminal.
Process 5: (Corresponding Mode I) The switch Q3 is in a conductive state, and the current of inductor L3 continues to increase. The vin end charges the inductor L3. The switch tubes Q1 and Q2 are in a conductive state, and the current of inductors L1 and L2 continues to decrease. Inductors L1 and L2 discharge towards the vo terminal.
Process 6: (Corresponding Mode VIII) Switch tubes Q1, Q2, and Q3 are in the off state, and the current of inductors L1, L2, and L3 continues to decrease. Inductors L1, L2, and L3 discharge towards the vo terminal.
3.1. Modeling of Three-Phase Interleaved Parallel DC/DC Converter Circuit
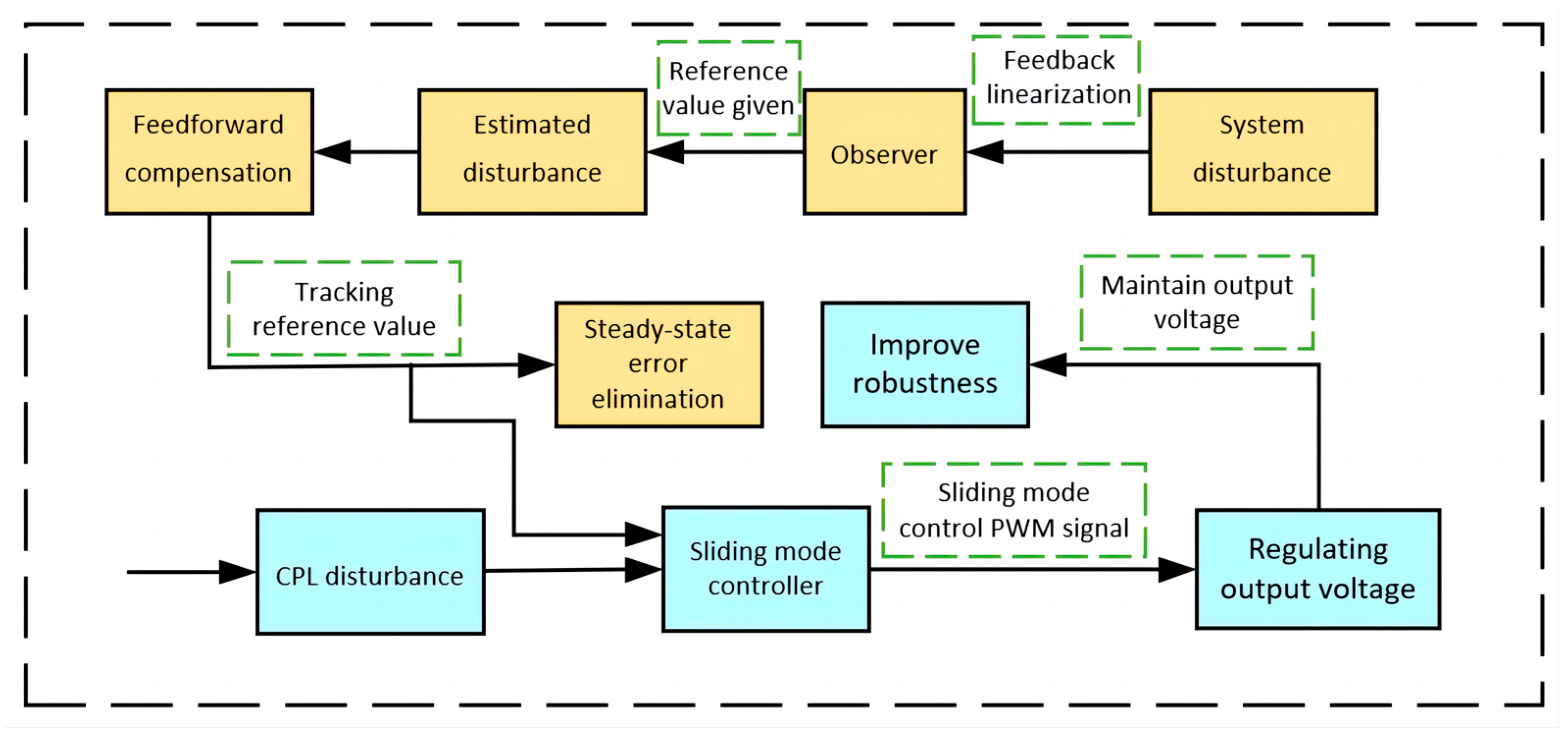
Based on the circuit structure and working principle of a three-phase interleaved parallel bidirectional DC-DC converter, this article divides it into three identical Buck–Boost circuits, without considering the parasitic components of capacitors and inductors. The control flowchart of the composite controller is shown in
Figure 8.
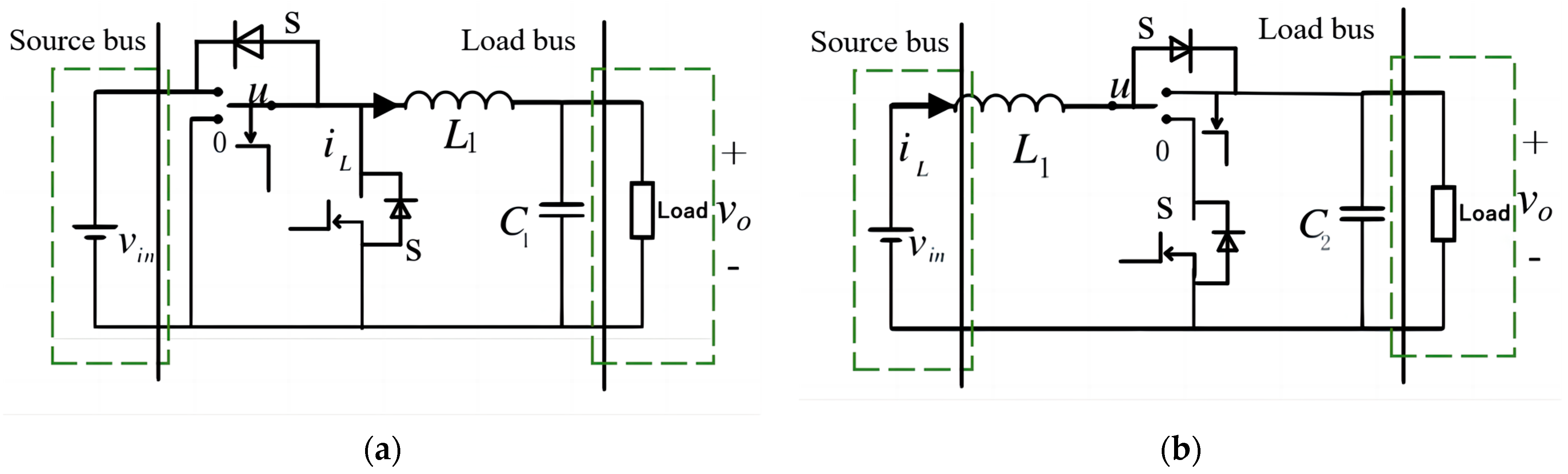
The equivalent circuit diagram is shown in
Figure 9a for when the converter is used as a Boost converter. The equivalent circuit diagram is shown in
Figure 9b for when the converter is used as a Buck converter. The topology parameters are shown in
Table 2.
The results of variable structure theory analysis can be used to obtain the state equation of the bidirectional DC-DC converter in Buck mode with continuous inductance current as follows:
Firstly, the Buck circuit is modeled and studied, and its equivalent circuit topology is shown in
Figure 9. Write the state equation in stages and calculate the average variable.
- (1)
In 0 ≤ t ≤ d
, switch the tube S conduction and diode VD cutoff, and, at this time, there is the following equation of state.
- (2)
In
≤ t ≤
, switch S off, diode VD conduction, and the inductor L release magnetic field can supply constant power load at the same time to charge the capacitor. The equation of state is as follows.
By averaging (2) and (3), the following matrix equation can be obtained.
The state space equation in Boost mode with a continuous inductance current is as follows:
The transfer function can be derived through Laplace transform, using the average state space equation:
This article first analyzes the Buck pattern.
where d is the duty cycle of the converter, and T is the switching cycle. A dynamic model of the Buck converter was established using the state-space averaging method. By substituting Equation (7) into (4) and linearizing it, we obtain the following:
The voltage tracking error is defined as
, where
is the reference voltage. The dynamic model in Equation (8) can be rewritten as follows:
where
, and another state variable is defined as
, so take the derivative of that and obtain the following:
where
,
is a more complex form of time varying, consisting of a constant power load and fluctuations in input voltage. The following equation can be obtained by sorting out Equations (9) and (10):
3.2. Observer-Based Sliding-Mode Control (SMC) Design
This section’s control objective is to design a generalized proportional integral observer to estimate the time-varying disturbance and update it into the controller in real time, so as to effectively suppress the influence of the disturbance and improve the anti-jamming performance of the whole system.
Sliding-mode control uses the designed control function to make the motion state of the system in “sliding mode”, which is a discontinuous switching control, so it is also called sliding-mode variable structure control. The basic idea of the sliding-mode variable structure control theory is to consider a nonlinear system and assume that there is a phase plane, which is called the sliding-mode surface, and a point in the plane is called a balance point. Using this sliding surface as a reference path, through effective design, the state variable of the system, i.e., the controlled trajectory, is attracted to slide along the set trajectory of the reference path and converges to the equilibrium point, regardless of the initial state of the system [
32,
33,
34].
The sliding-mode control needs to meet the following three basic conditions: existence, accessibility, and stability. Existence refers to the existence of a sliding surface in a system. Reachability refers to the ability of points outside the sliding surface of a system state to move to the sliding surface within a finite time [
35,
36,
37,
38,
39]. Stability refers to the ultimate stability of the system state under model control.
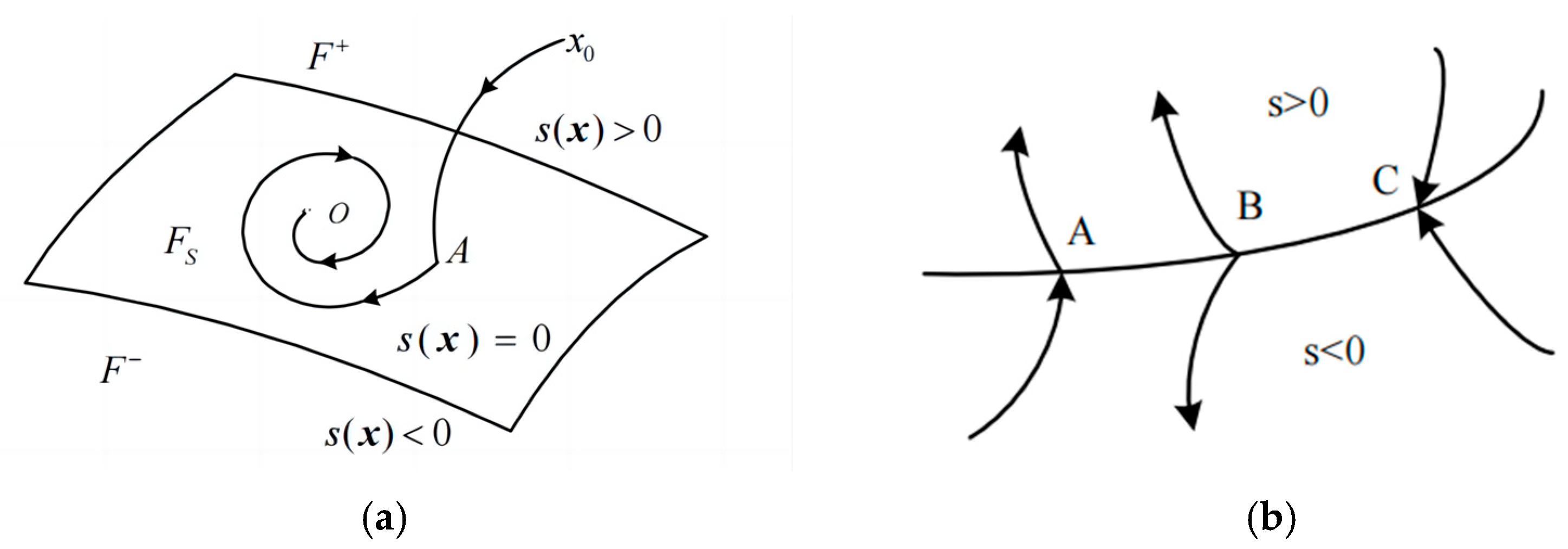
For the sliding-mode control, the first step is to determine the sliding surface and select the appropriate sliding-surface function, s(x). Under the action of different control functions, the trajectory of the system moves differently. As shown in
Figure 10a, by designing appropriate control functions, the system can start from an arbitrary initial point,
, in the state space and reach the switching surface (as shown in the
→A section) in a finite time. This process is called the approach section. Once the system trajectory reaches the switching surface, it stays on it and continues to move, and this is called the sliding-mode section (as shown in section A→O). The state of the system moving on the switching surface is called the sliding mode. Since the switching surface is designed according to the expected moving target of the system, no matter how the external parameters change, the system trajectory will eventually reach the preset value on the switching surface [
40,
41,
42,
43].
In the state space, take s(x) = 0 as the sliding surface, which represents the state, as shown in
Figure 10b. The space is divided into two: s(x) > 0 and s(x) < 0. The motion points on the sliding surface can be divided into three categories:
Usually Point A: After the system moves near the sliding surface, it will pass through this point;
Starting Point B: After the system motion point reaches the vicinity of the sliding surface, it leaves from both sides of that point;
Termination Point C: The system moves towards this point from the upper and lower sides of the sliding surface.
In the study of sliding-mode control, the first two types of motion points have little significance for system control and are generally ignored. If a certain area on the sliding-mode surface is all termination points, it means that once the system state moves near that area, it will be attracted to the area, and this area is therefore called the “sliding mode area”. Due to the fact that all points on the sliding-mode area are termination points, when the system moves near the sliding surface, there will inevitably be
[
44,
45,
46].
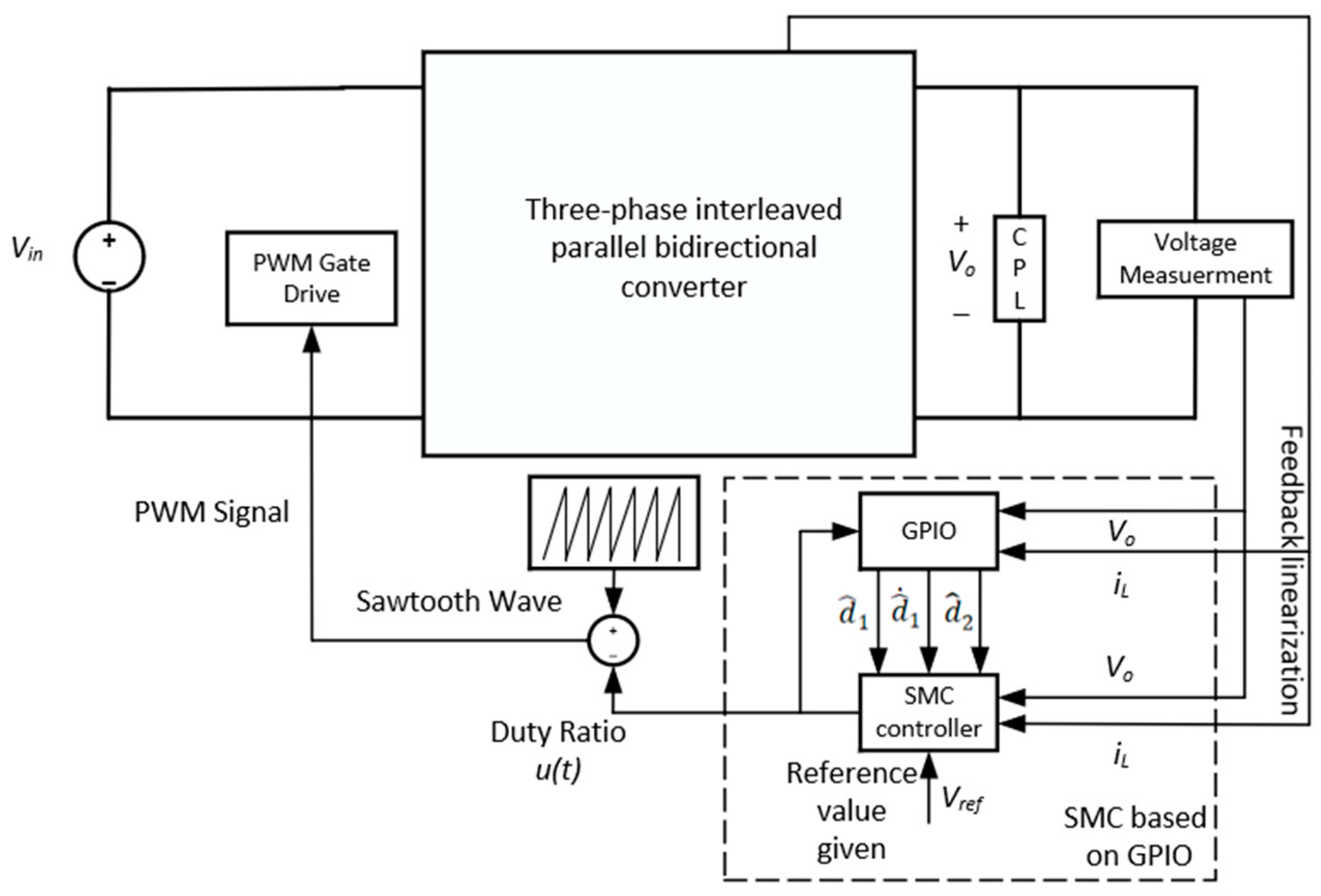
The specific system control is shown in
Figure 11. The system block diagram includes four parts: two generalized proportional integral observers, a sliding-mode controller, a pulse width modulator (PWM), and a three-phase interleaved parallel DC/DC converter. The system works as follows: Firstly, two generalized proportional integral observers are constructed based on the feedback values of inductance current and output voltage, and the matched and unmatched disturbances are estimated, respectively. Then, a sliding-mode controller is designed using the estimated values. The controller is compared with the sawblade wave to obtain a PWM wave, and the switching tube of the DC step-down converter is controlled by the PWM wave. The converter can output the desired voltage stably.
3.3. GPI Observer Design
The voltage tracking accuracy of the DC-DC converter system will be affected by disturbances, such as input voltage fluctuation, parameter uncertainty, load resistance disturbance, etc. An effective method to eliminate these disturbances is to introduce disturbance estimation to compensate accurately. For the Buck converter, two generalized integral observers are designed to estimate the matched disturbance and the unmatched disturbance, respectively, and the disturbance estimation is introduced into the design of the control law to compensate for the influence of these disturbances and uncertainties. The specific design of the two generalized proportional integral observers is as follows. The GPI observer of CPL perturbation based on the Buck converter can be constructed as follows:
where
is an estimated value of the nth order derivative of
, and
(i = 1, 2, …, n + 1) represents the parameters to be determined.
To estimate the input voltage disturbance, (t), another GPI observer is constructed:
where
is an estimated value of the nth order derivative of
, and
(j = 1, 2, …, m + 1) represents the parameters to be determined.
According to Equations (9) and (10), the uncertainties (i = 1, 2) are related to the power of constant power load, so from a practical point of view, their values and derivatives should be bounded.
In a steady state, the power of the constant power load is considered constant. Therefore, the following assumptions can be made:
The uncertain variables,
and
, of the system (i = 1, 2) meet the following two conditions [
47]:
According to Equation (8), the uncertain term is defined by the following:
where
is the auxiliary state of the observer, and
is a normal number that is expressed as the observer gain. Similarly, the uncertainty term is given by the following:
where
is the observer’s auxiliary state, and
is a normal number that is expressed as the observer gain.
Based on Equations (12) and (13), the standard model and observer estimate of the load power can be provided according to the sliding-mode control design of the proposed composite controller. Them we take the switching function of the system as follows:
where
> 0 is a parameter to be selected.
As a high-order sliding-mode algorithm, the realization of the high-order sliding-mode algorithm usually requires the derivative of sliding-mode variables, while the super-distortion algorithm is a second-order sliding-mode algorithm in nature, so its realization does not require the derivative of sliding-mode variables, thus simplifying the controller structure. Through the design of the control rate, the sliding-mode variable structure rapidly converges within a limited time [
30].
The general form of the super-twisting algorithm is as follows:
In Equation (16), and are the state variables; and c are the positive constants; and and are the disturbance quantities.
In order to weaken chattering, saturation function is often used to replace the sign function [
48]. The form of saturation function is as follows:
By combining Equations (18) and (19), the form of the super-twisting algorithm becomes the following:
When the super-twisting algorithm is used to design the sliding-mode control function, let , and are the parameters to adjust the dynamic velocity and set the steady-state error, respectively. Among them, the parameters affect the convergence rate of the sliding-mode surface. In general, the system can reach the sliding-mode surface faster by taking a larger value and a smaller value.
When the first derivative of the sliding-mode surface is zero, the switching signal,
, is equivalent to a continuous value,
.
where the control parameter,
> 0, and the switching gain, η > 0, are the parameters to be designed. Then, the total switch signal,
, is as follows:
where
is used to ensure that the trajectory of the system phase is maintained on the sliding-mode surface, and
is used to overcome the disturbance effect and to ensure the robustness of the system. The following proves the existence and accessibility of the switching surface, and the Lyapunov function is used to analyze the switching function, so as to enable the stability of the controller’s control voltage and the state curve to quickly converge to the sliding surface.
4. Controller Stability Analysis
Theorem 1. Consider a DC-DC converter system with both CPL and supply voltage perturbations and combine Equation (14). Under the proposed control law (21), the effect of the time-varying perturbation is removed from the output voltage channel, provided that the switching gain, ), and the observer parameters in selected Equations (12) and (13) are appropriate, such that (25) is the Hurwitz matrix.
Proof of Theorem 1. For the GPI observer, the estimated error is defined as , , and . The upper bound of the estimation error is defined as , (i = 1, 2, 3). Then, the estimated error of the observer can be expressed as follows:
where e = [
takes the derivative of the estimate error. Then, the observer error can be dynamically expressed as follows:
where
By selecting parameters correctly in the GPI observer, we can get the Hurwitz stability matrix; that is, the state matrix of the system is the Hurwitz matrix. Then, the error dynamic is asymptotically stable, which means the following:
Take the Lyapunov function as follows:
Substituting (17) and (22) into (28) gives the following:
where the coefficient
of
can be seen from Equation (17); when s < 0,
> 0, and when s > 0,
< 0. Then, when the switching gain
) meets the condition, it is satisfied,
< 0. According to Lyapunov’s sliding-mode reachability condition, the system can reach the designed sliding-mode surface in a finite time. The system state will reach the defined sliding surface, s = 0, in a finite time.
By integrating Equations (11) and (17), we obtain the following:
According to Reference [
18], if the following system exists,
when the system input reaches stability, if the input signal meets
, then the states satisfy
. According to Equations (26) and (17),
,
. It is easy to arrive at the conclusion that the voltage tracking error converges asymptotically to zero along the sliding surface, thus completing the proof. Similarly, the Boost mode is a similar proof. □






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}