
A Robust Control Scheme for Dynamic Voltage Restorer with Current Limiting Capability

Abstract
:1. Introduction
- A smooth control scheme is presented for the series and shunt converter of an FCL-DVR, where the frequent switching of control schemes can be avoided.
- A second-order sliding mode control scheme is proposed to improve the robustness of the FCL-DVR system. The stability analysis of the proposed controller is introduced.
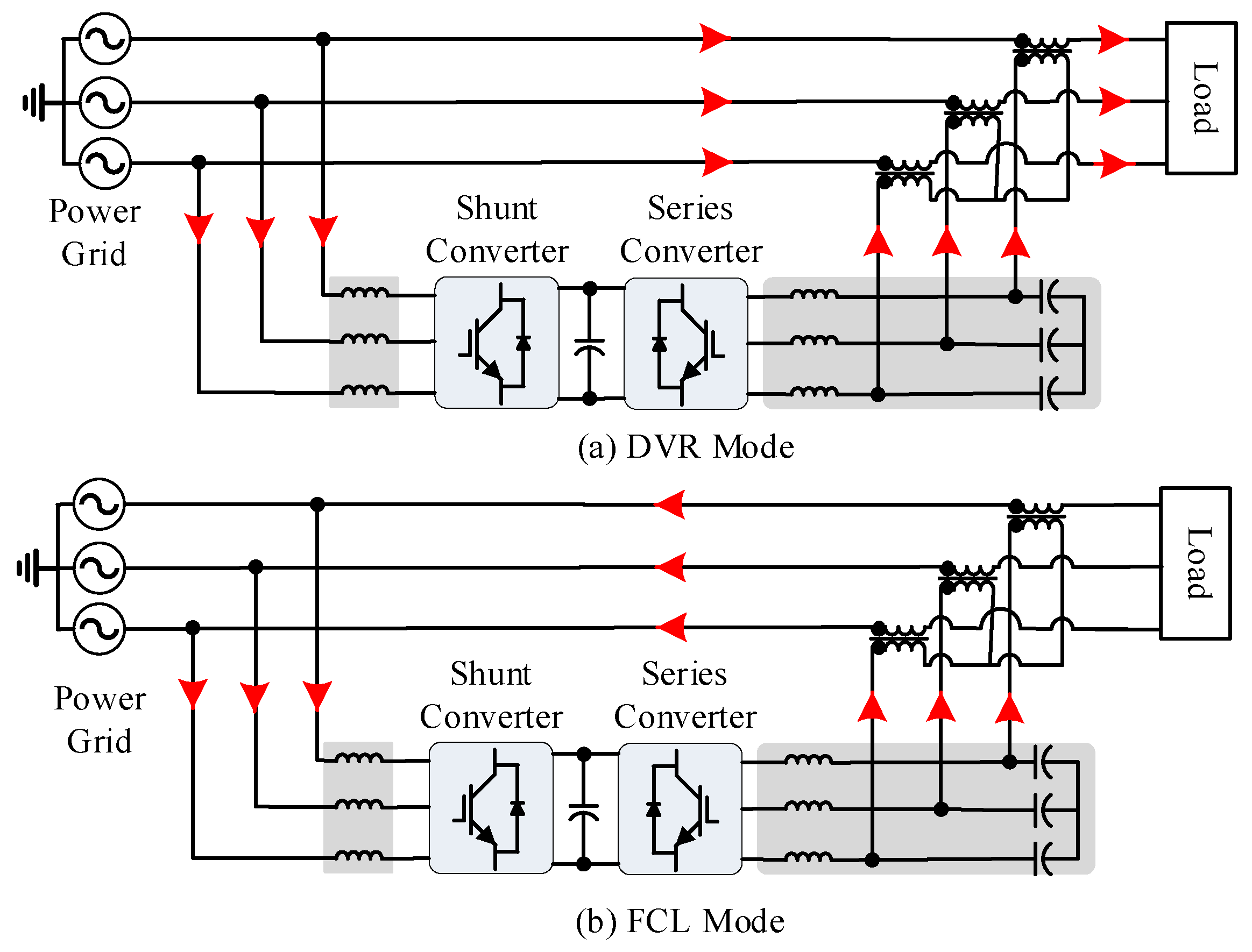
2. Operation Principle of FCL-DVR
2.1. Topology of FCL-DVR
2.2. FCL-DVR Operation Mode
2.2.1. Normal Operation Mode
2.2.2. DVR Operation Mode
2.2.3. The FCL Operation Mode
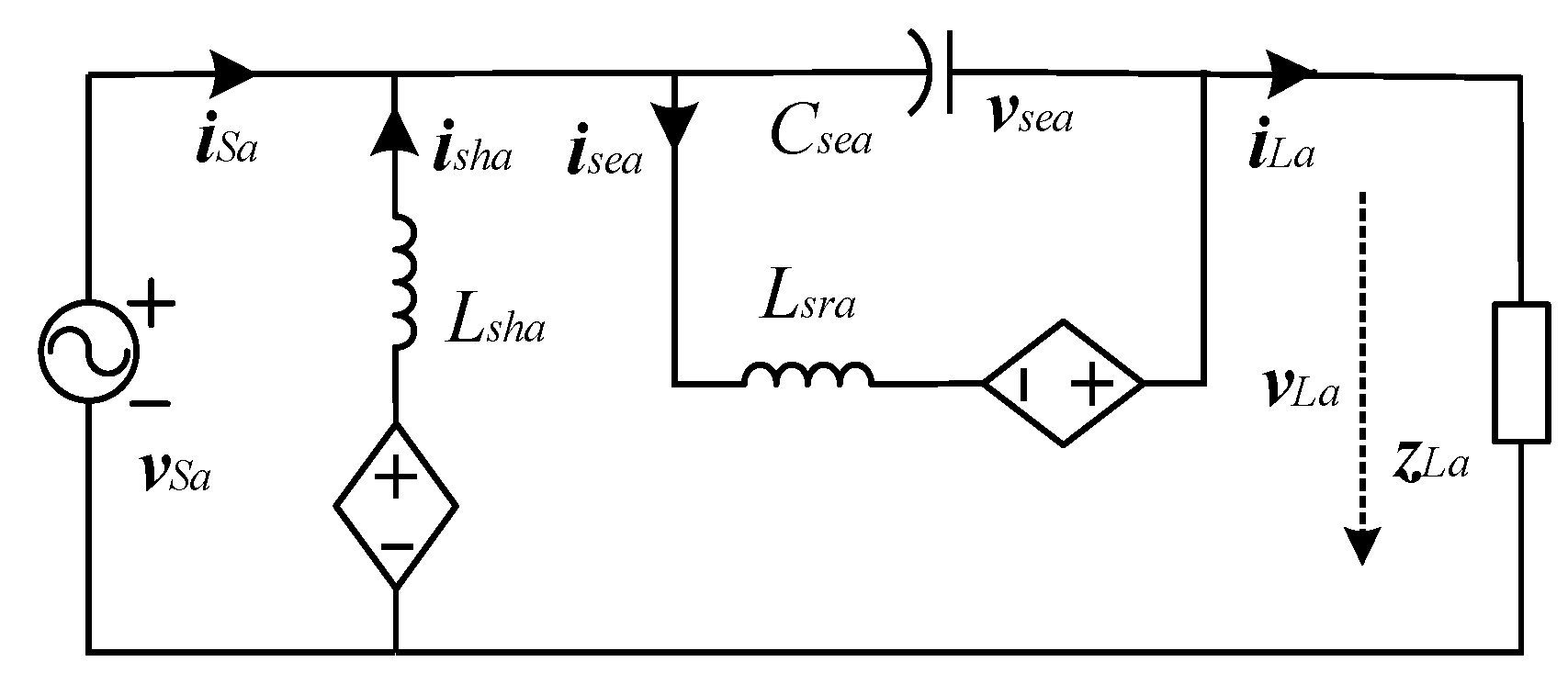
3. Mathematical Model of FCL-DVR
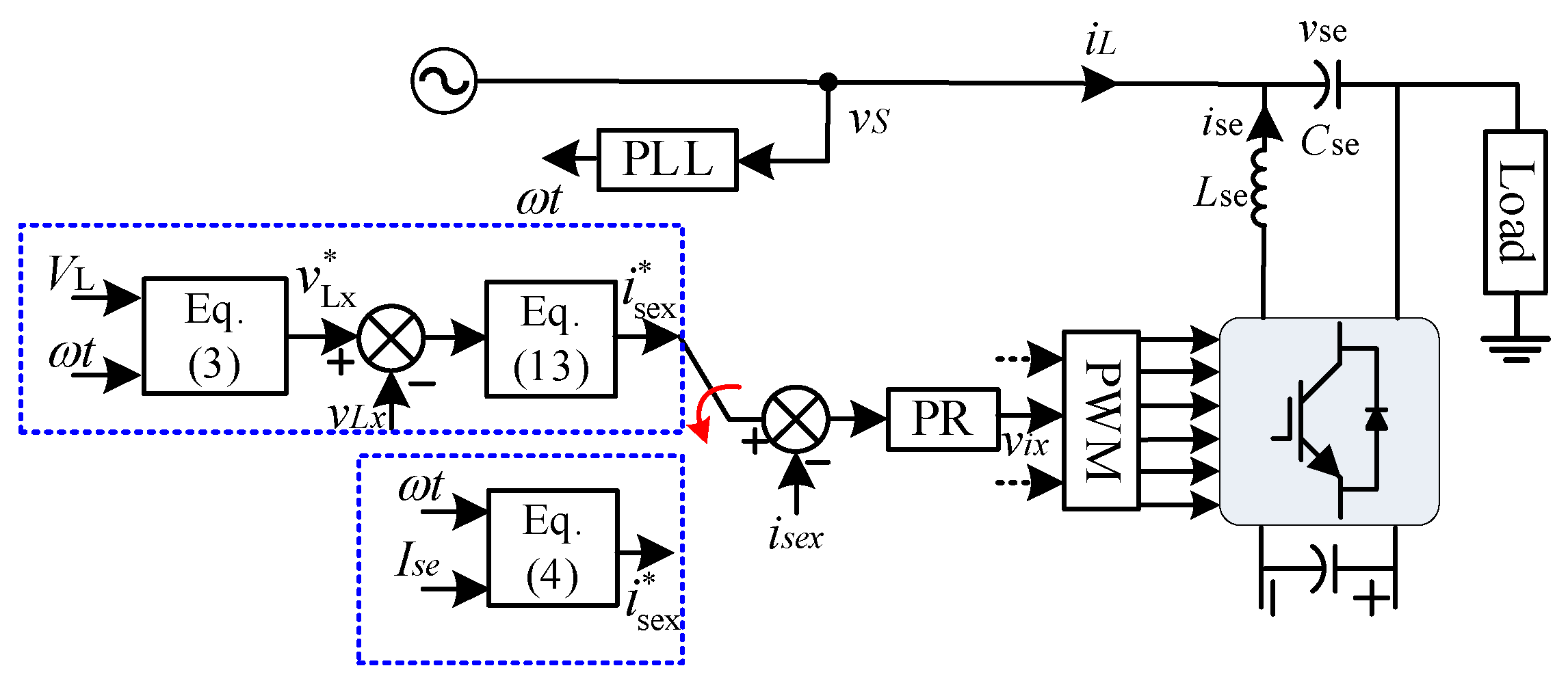
4. Second-Order Sliding Mode Control Scheme of FCL-DVR
4.1. Design of Second-Order Sliding Mode Controller of Outer Voltage Control Loop
4.1.1. Design of the Integral Sliding Surface of the Outer Voltage Control Loop
4.1.2. Design of the Outer Voltage Loop’s Control Law
4.1.3. Stability Analysis
4.1.4. Parameters of the Sliding Mode Control
4.2. Design of Inner Current Loop’s PR Controller
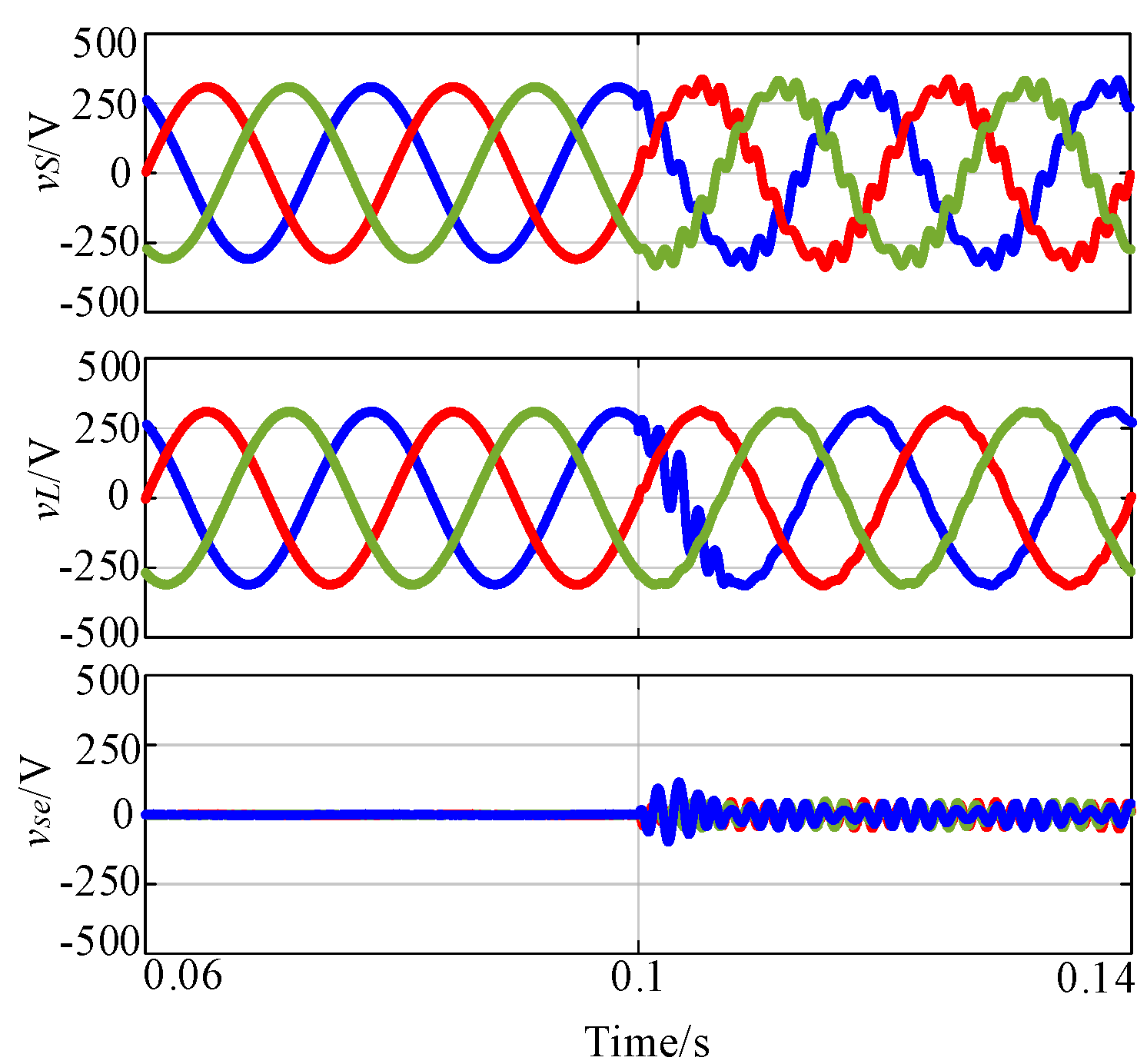
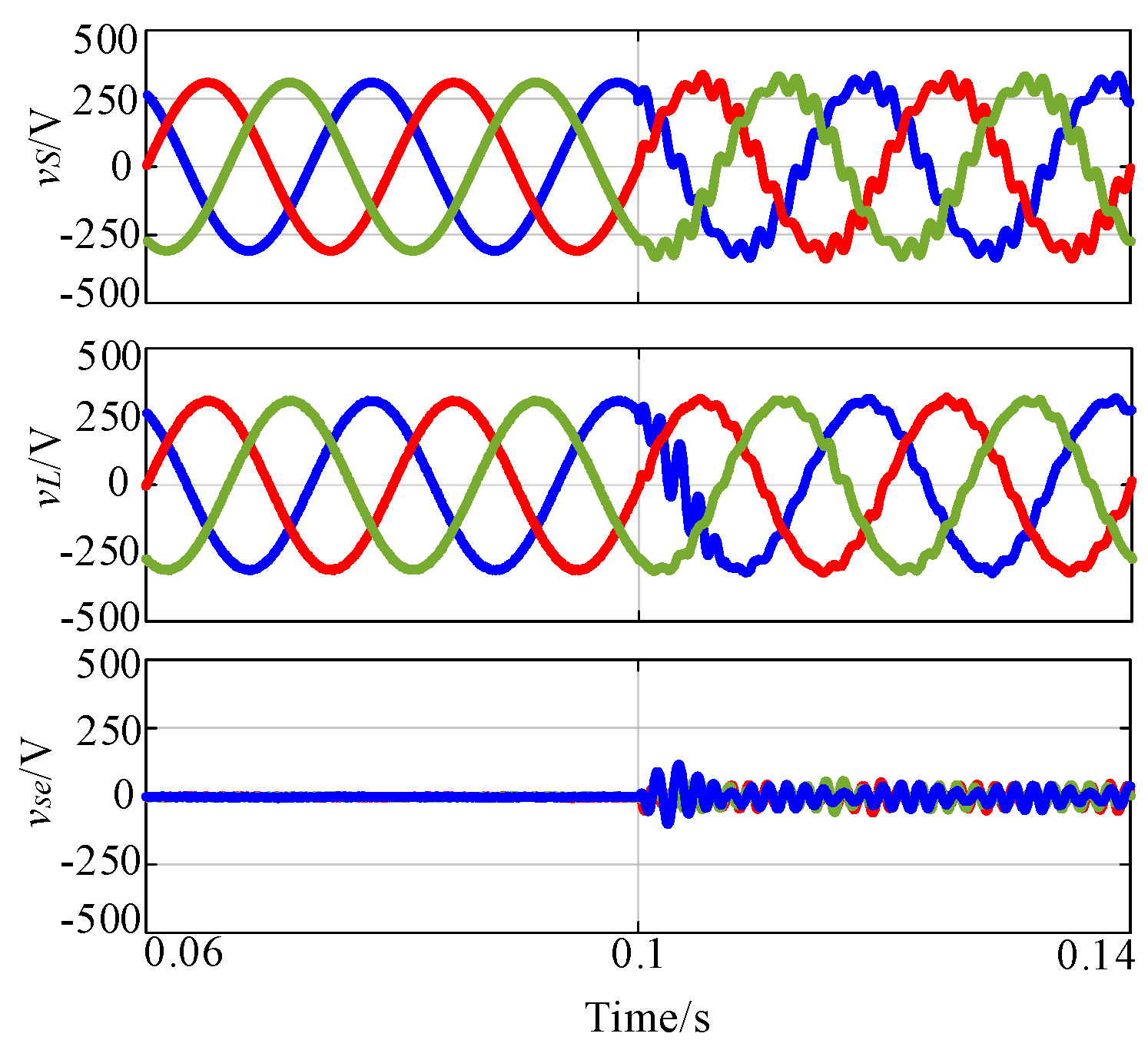
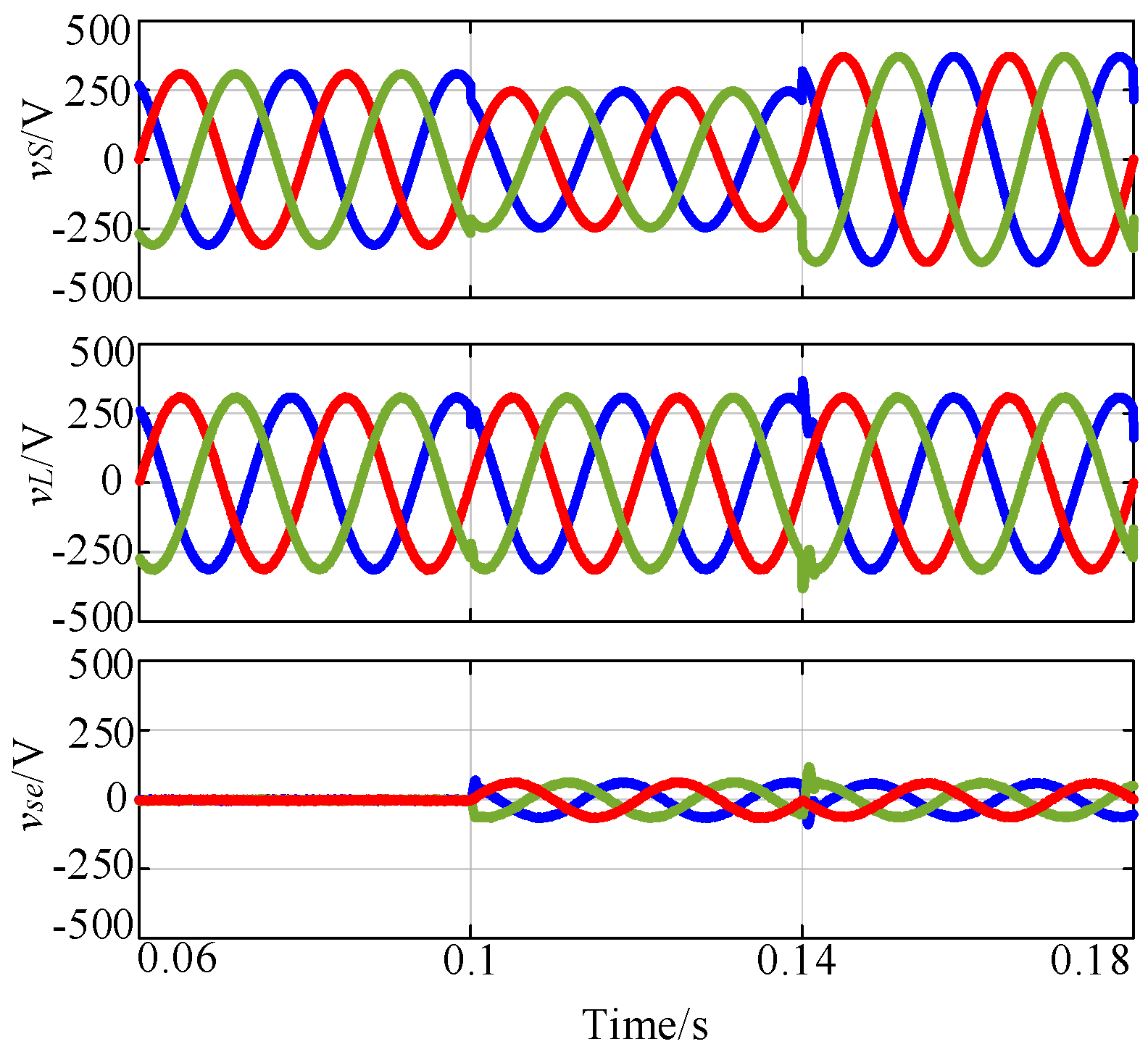
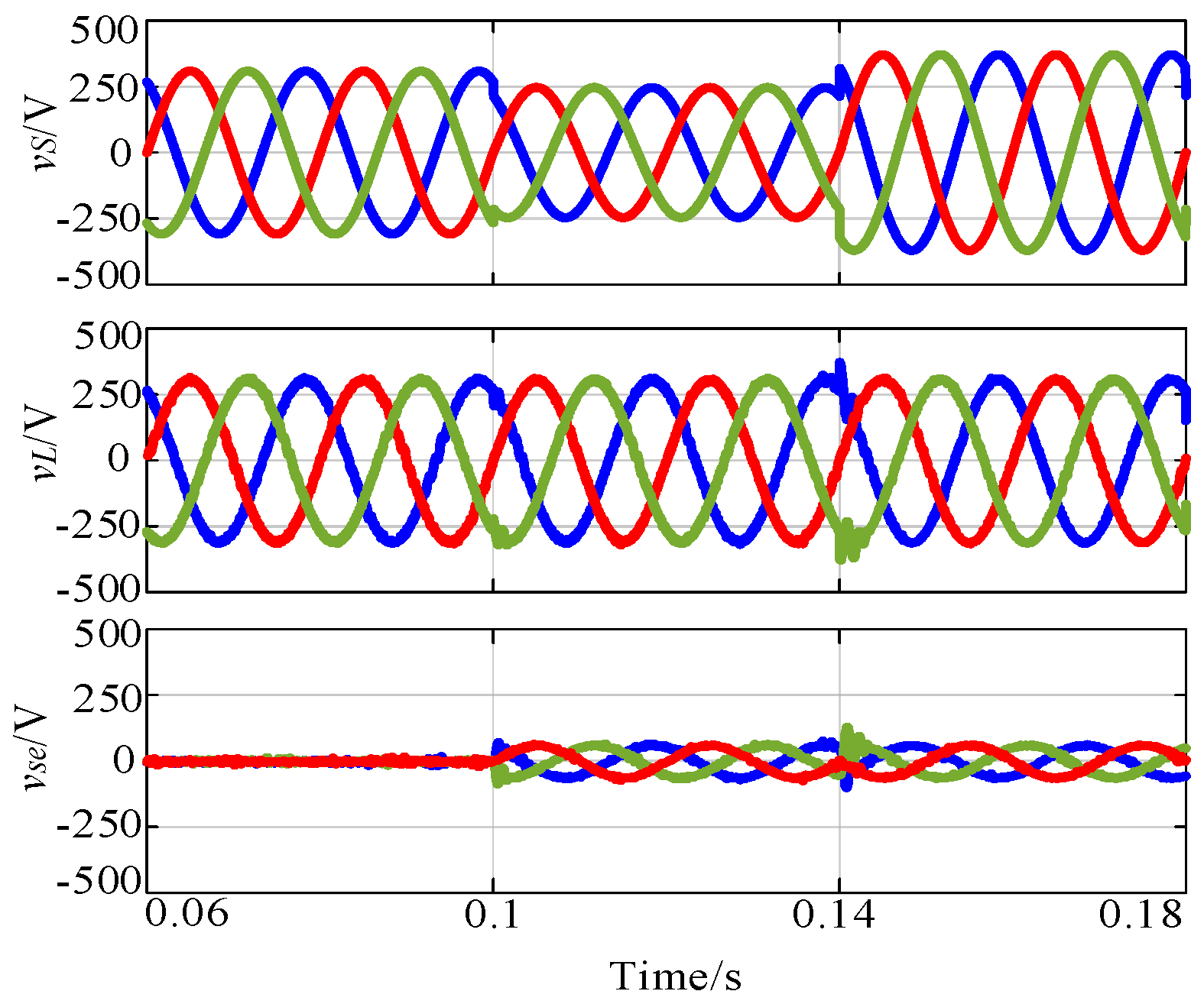
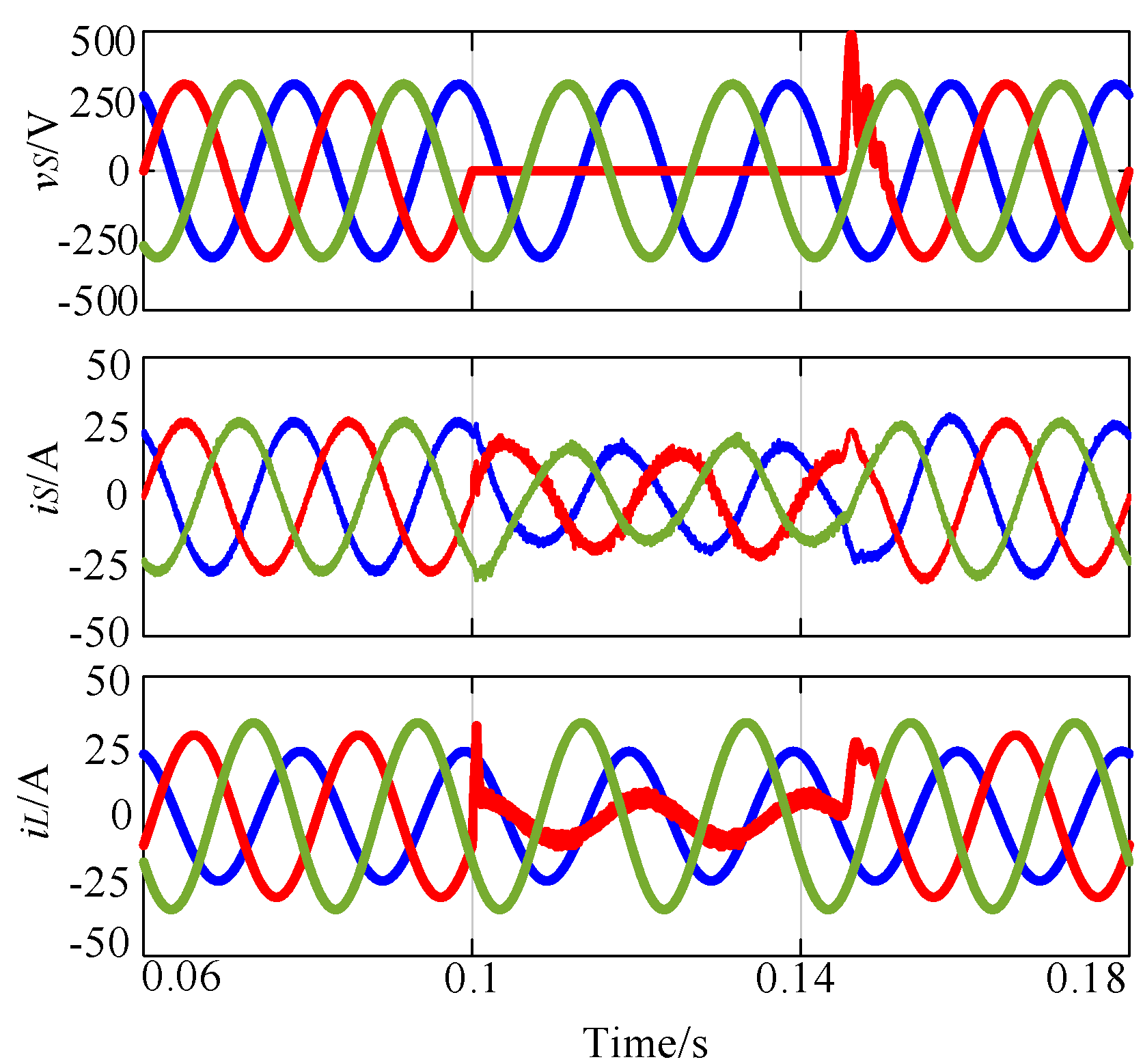
5. Simulation Results
6. Conclusions
- (1)
- A second-order sliding mode controller can result in a better resistance to voltage disturbance than the conventional PI/PR regulator.
- (2)
- A second-order sliding mode controller can have a better dynamic feature than the conventional PI/PR regulator as the second-order sliding mode controller reduces the response time and overshooting.
- (3)
- The FCL-DVR with a second-order sliding controller can maintain the large fault current by switching the control mode from DVR to FCL.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, Z.; Xu, B.; Liu, C.; Hu, C.; Liu, B.; Xu, Z.; Jin, L.; Chen, W. The Modeling and Simplification of a Thermal Model of a Planar Transformer Based on Internal Power Loss. Sustainability 2022, 14, 11915. [Google Scholar] [CrossRef]
- Liang, X. Emerging Power Quality Challenges Due to Integration of Renewable Energy Sources. IEEE Trans. Ind. Appl. 2017, 53, 855–866. [Google Scholar] [CrossRef]
- Mahela, O.P.; Shaik, A.G.; Gupta, N. A critical review of detection and classification of power quality events. Renew. Sustain. Energy Rev. 2015, 41, 495–505. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A novel composite nonlinear controller for stabilization of constant power load in DC microgrid. IEEE Trans. Smart Grid 2017, 10, 752–761. [Google Scholar] [CrossRef]
- Peñalvo-López, E.; León-Martínez, V.; Montañana-Romeu, J.; Cárcel-Carrasco, J. Passive Reactive Power Compensators for Improving the Sustainability of Three-Phase, Four-Wire Sinusoidal Systems Supplied by Unbalanced Voltages. Sustainability 2021, 13, 11134. [Google Scholar] [CrossRef]
- Chen, X.; Xie, Q.; Bian, X.; Shen, B. Energy-saving superconducting magnetic energy storage (SMES) based interline DC dynamic voltage restorer. CSEE J. Power Energy Syst. 2021, 8, 238–248. [Google Scholar]
- Najy, W.K.A.; Zeineldin, H.H.; Woon, W.L. Optimal protection coordination for microgrids with grid-connected and islanded capability. IEEE Trans. Ind. Electron. 2012, 60, 1668–1677. [Google Scholar] [CrossRef]
- Std C37.48-2020; IEEE Guide and Tutorial for the Application of High-Voltage (>1000 V) Fuses and Accessories. (Revision of IEEE Std C37.48-2005 and IEEE Std C37.48.1-2011). IEEE: Piscataway, NJ, USA, 2020. [CrossRef]
- Sneath, J.; Rajapakse, A.D. Fault detection and interruption in an earthed HVDC grid using ROCOV and hybrid DC breakers. IEEE Trans. Power Deliv. 2014, 31, 973–981. [Google Scholar] [CrossRef]
- Huber, J.E.; Kolar, J.W. Applicability of solid-state transformers in today’s and future distribution grids. IEEE Trans. Smart Grid 2017, 10, 317–326. [Google Scholar] [CrossRef]
- Sharaf, H.M.; Zeineldin, H.H.; El-Saadany, E. Protection Coordination for Microgrids With Grid-Connected and Islanded Capabilities Using Communication Assisted Dual Setting Directional Overcurrent Relays. IEEE Trans. Smart Grid 2018, 9, 143–151. [Google Scholar] [CrossRef]
- Abramovitz, A.; Ma Smedley, K. Survey of Solid-State Fault Current Limiters. IEEE Trans. Power Electron. 2012, 27, 2770–2782. [Google Scholar] [CrossRef]
- Zhikang, S.; Peng, Y.; Shen, Z.J.; Tu, C.; Jiang, F.; Cheng, Y. Design considerations of a fault current limiting dynamic voltage restorer (FCLDVR). IEEE Trans. Smart Grid 2015, 6, 14–25. [Google Scholar]
- Jiang, F.; Tu, C.; Shuai, Z.; Cheng, M.; Lan, Z.; Xiao, F. Multilevel cascaded-type dynamic voltage restorer with fault current limiting function. IEEE Trans. Power Deliv. 2016, 31, 1261–1269. [Google Scholar] [CrossRef]
- Nourmohamadi, H.; Sabahi, M.; Balsara, P.T.; Babaei, E.; Hosseini, S.H.; Fakhim-Babaei, A. New Concept for Fault Current Limiter with Voltage Restoration Capability. IEEE Trans. Ind. Electron. 2020, 67, 10001–10010. [Google Scholar] [CrossRef]
- Han, J.; Li, X.; Sun, Y.; Gong, S.; Huang, S. Quadruple-active-bridge based unified power quality conditioner-L with fault current limiting capability. Electr. Power Syst. Res. 2022, 206, 107780. [Google Scholar] [CrossRef]
- Ghavidel, P.; Farhadi, M.; Dabbaghjamanesh, M.; Jolfaei, A.; Sabahi, M. “Fault Current Limiter Dynamic Voltage Restorer (FCL-DVR) With Reduced Number of Components”. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 526–534. [Google Scholar] [CrossRef]
- Li, J.; Sun, Y.; Li, X.; Xie, S.; Lin, J.; Su, M. Observer-Based Adaptive Control for Single-Phase UPS Inverter Under Nonlinear Load. IEEE Trans. Transp. Electrif. 2022, 8, 2785–2796. [Google Scholar] [CrossRef]
- Cavallo, A.; Russo, A.; Canciello, G. Control of Supercapacitors for smooth EMA Operations in Aeronautical Applications. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4948–4954. [Google Scholar] [CrossRef]
- Russo, A.; Canciello, G.; Cavallo, A. Generalized Super-Twisting control of a Dual Active Bridge for More Electric Aircraft. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021; pp. 1610–1615. [Google Scholar] [CrossRef]
- Biricik, S.; Komurcugil, H.; Ahmed, H.; Babaei, E. Super Twisting Sliding-Mode Control of DVR With Frequency-Adaptive Brockett Oscillator. IEEE Trans. Ind. Electron. 2021, 68, 10730–10739. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Bizon, N.; Colak, I.; Thounthong, P.; Takorabet, N. Simplified Super Twisting Sliding Mode Approaches of the Double-Powered Induction Generator-Based Multi-Rotor Wind Turbine System. Sustainability 2022, 14, 95014. [Google Scholar] [CrossRef]
- Sun, D.; Wang, X.; Nian, H.; Zhu, Z.Q. A Sliding-Mode Direct Power Control Strategy for DFIG Under Both Balanced and Unbalanced Grid Conditions Using Extended Active Power. IEEE Trans. Ind. Electron. 2018, 33, 1313–1322. [Google Scholar] [CrossRef]
- Hu, J.; Nian, H.; Hu, B.; He, Y.; Zhu, Z.Q. Direct Active and Reactive Power Regulation of DFIG Using Sliding-Mode Control Approach. IEEE Trans. Energy Convers. 2010, 25, 1028–1039. [Google Scholar] [CrossRef]
- Hung, V.T.; Shu, H.; Giang, L.N.; The, N.D. Double-loop control structure using proportional resonant and sequence-decoupled resonant controllers in static coordinates for dynamic voltage restorer. Chin. J. Electr. Eng. 2019, 5, 10–19. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Number of Line Transformers | Number of Switches in 3 Phase | Power Losses | Compensation Voltage Sag | Limiting Fault Current Ability |
|---|---|---|---|---|---|
| [13] | 2 | 24 | High | yes | yes |
| [16] | 0 | 34 | N/A | yes | Yes |
| [17] | 1 | 6 | Medium | yes | yes |
| Proposed system | 1 | 12 | N/A | yes | yes |
| Parameters | Values |
|---|---|
| Grid voltage | 380 V |
| Grid angular frequency | 314 rad/s |
| Series converter’s filter capacitance | 80 µF |
| Series converter’s filter inductance | 6 mH |
| DC capacitance | 4000 µF |
| DC voltage | 800 V |
| Grid equivalent resistance | 0.5 Mh |
| Load resistance | 10 kHz |
| Control Parameters | Values |
|---|---|
| Second-order sliding mode controller | |
| 46 | |
| 6173 | |
| 2.162 × 106 | |
| PR controller | |
| 2 | |
| 800 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Xu, X. A Robust Control Scheme for Dynamic Voltage Restorer with Current Limiting Capability. Sustainability 2022, 14, 16752. https://doi.org/10.3390/su142416752
Shi J, Xu X. A Robust Control Scheme for Dynamic Voltage Restorer with Current Limiting Capability. Sustainability. 2022; 14(24):16752. https://doi.org/10.3390/su142416752
Chicago/Turabian StyleShi, Jie, and Xiangzheng Xu. 2022. "A Robust Control Scheme for Dynamic Voltage Restorer with Current Limiting Capability" Sustainability 14, no. 24: 16752. https://doi.org/10.3390/su142416752