
Determining an Improved Traffic Conflict Indicator for Highway Safety Estimation Based on Vehicle Trajectory Data

 , ,
, ,
Abstract
:1. Introduction
2. Literature Review
2.1. Traffic Conflict Indicator
2.2. Traffic Conflict Data Collection Methods and Processing Means
2.3. Conflict-Accident Correlation
2.4. Literature Summary
3. Data
3.1. Video Capture Location and Time
3.2. Video Capture Equipment
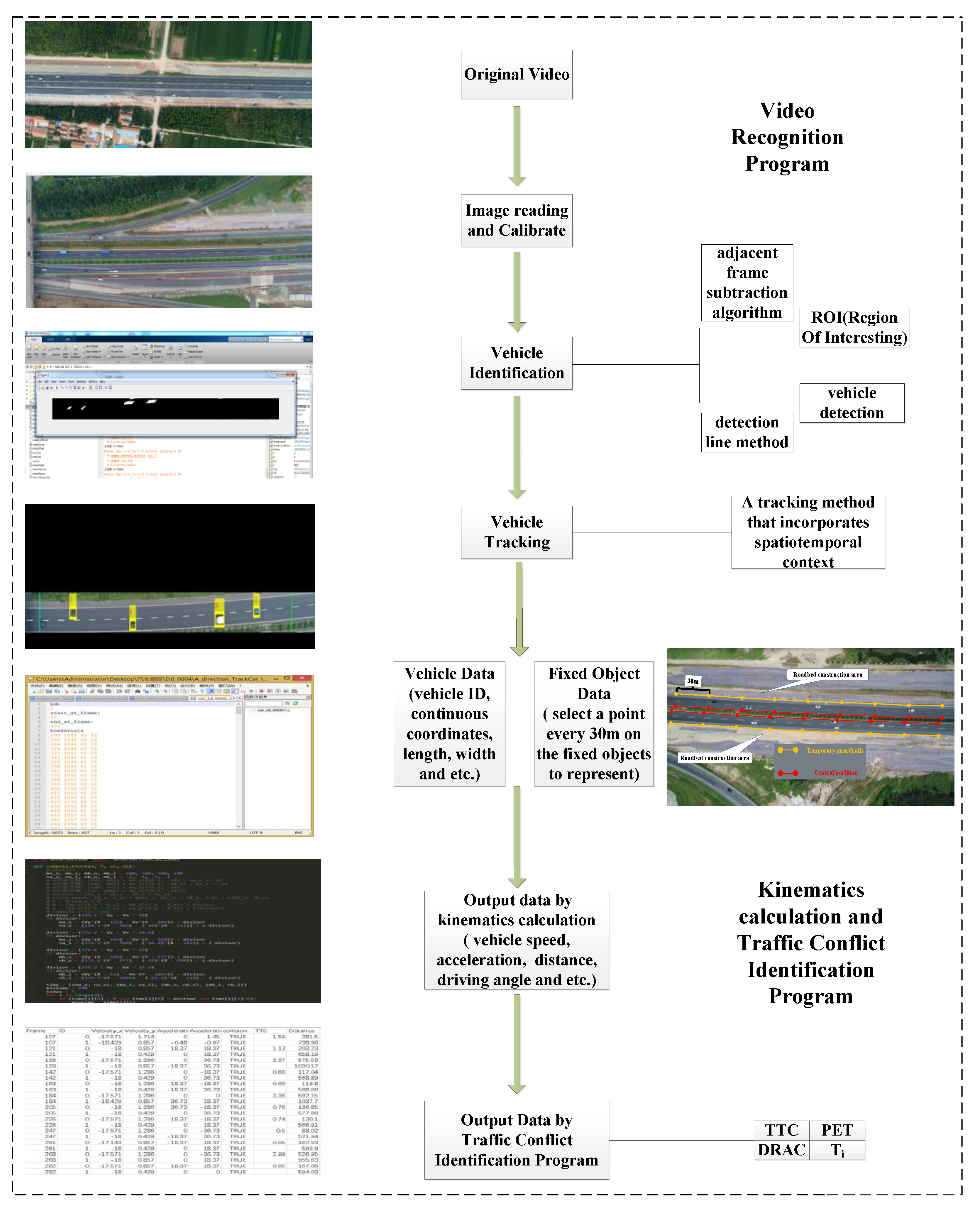
3.3. Video Recognition and Conflict Identification Processes
3.4. Accident Data Collection
4. Methods
4.1. Definition and Calculation of Improved Conflict Indicator Ti
4.2. Conflict and Accident Rates in Correlation Analysis
5. Results
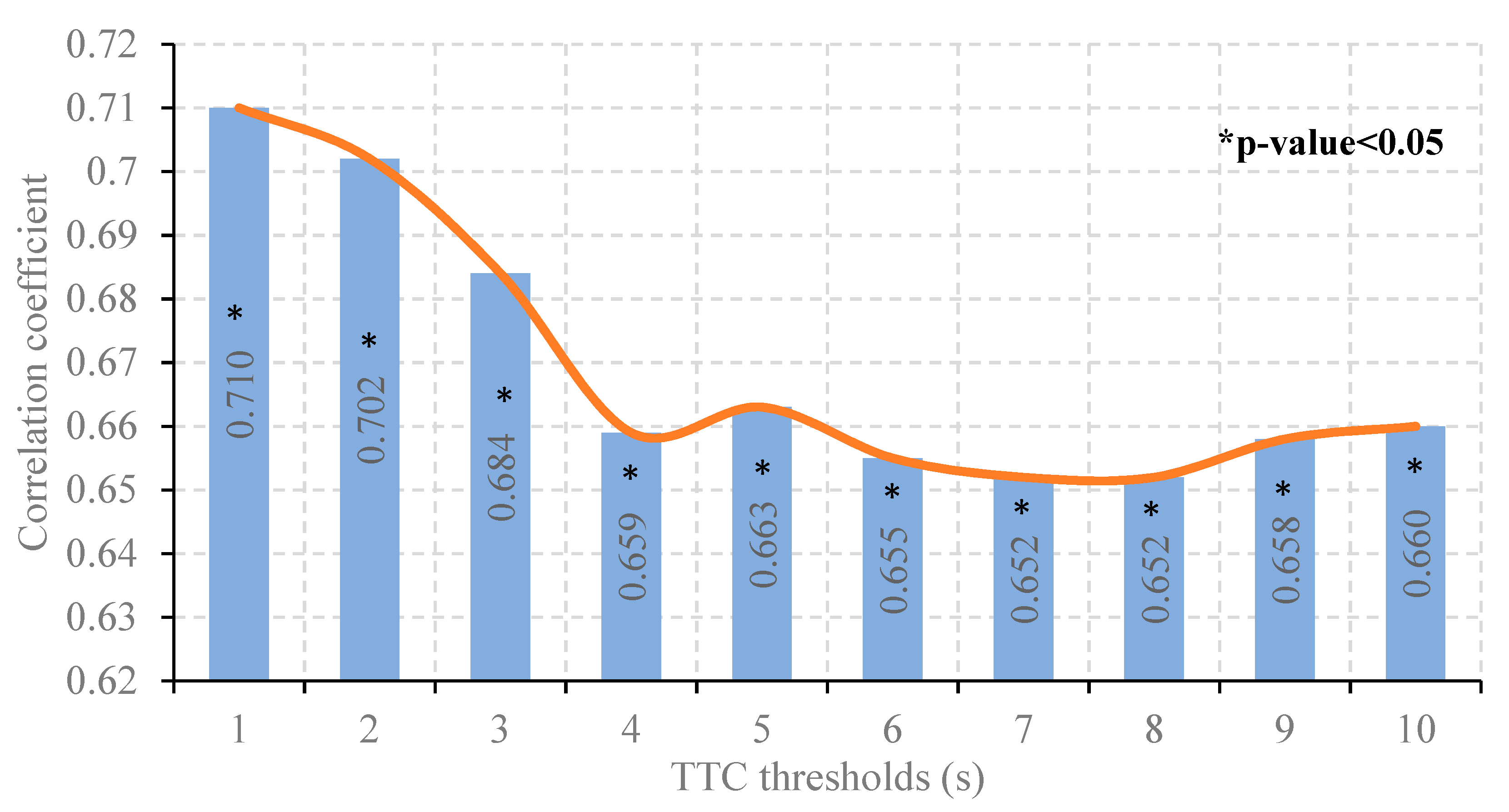
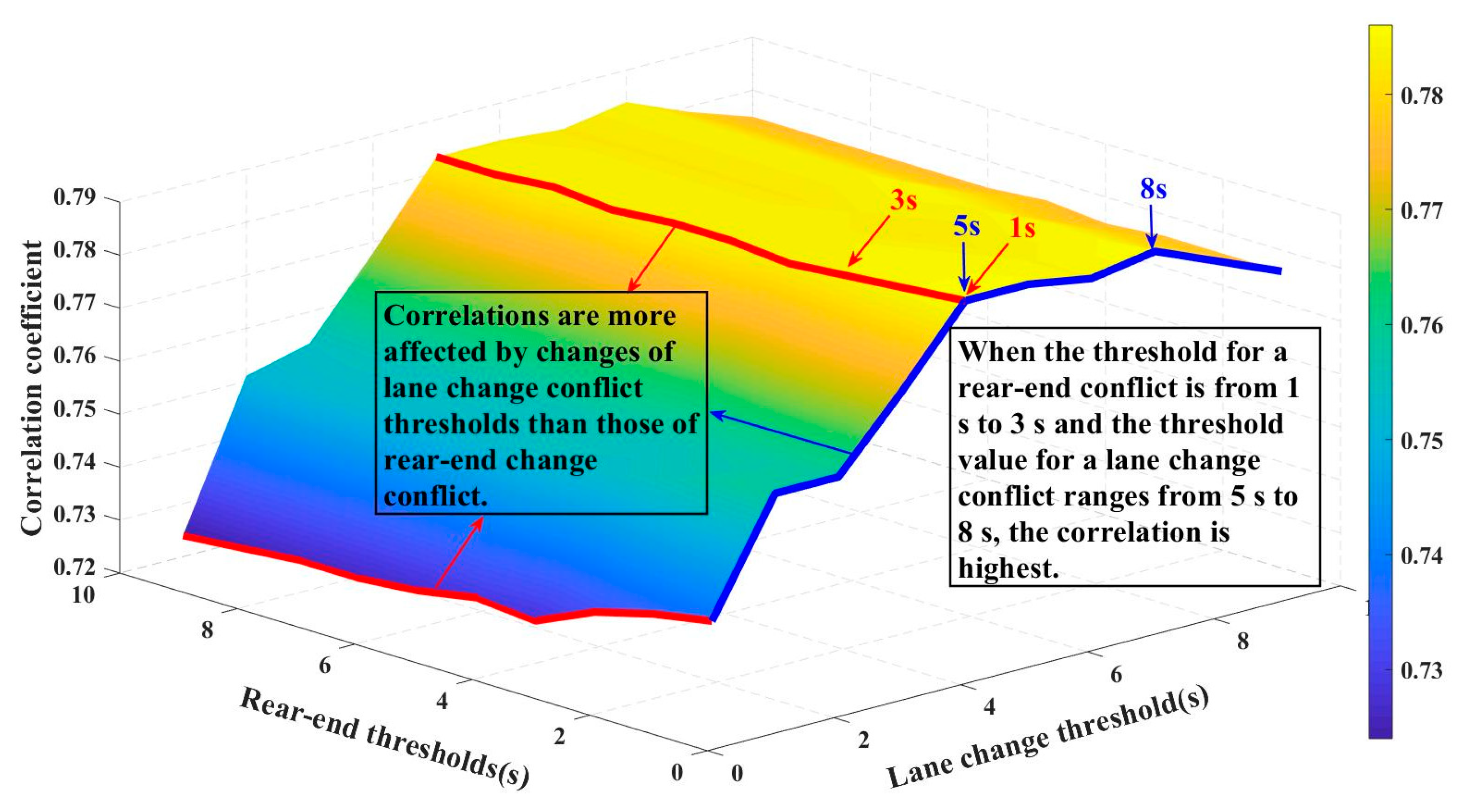
5.1. Conflict-Accident Correlation at Different Thresholds for Each Indicator
5.2. Comparison of Various Indicators
6. Discussion
6.1. Case Analysis
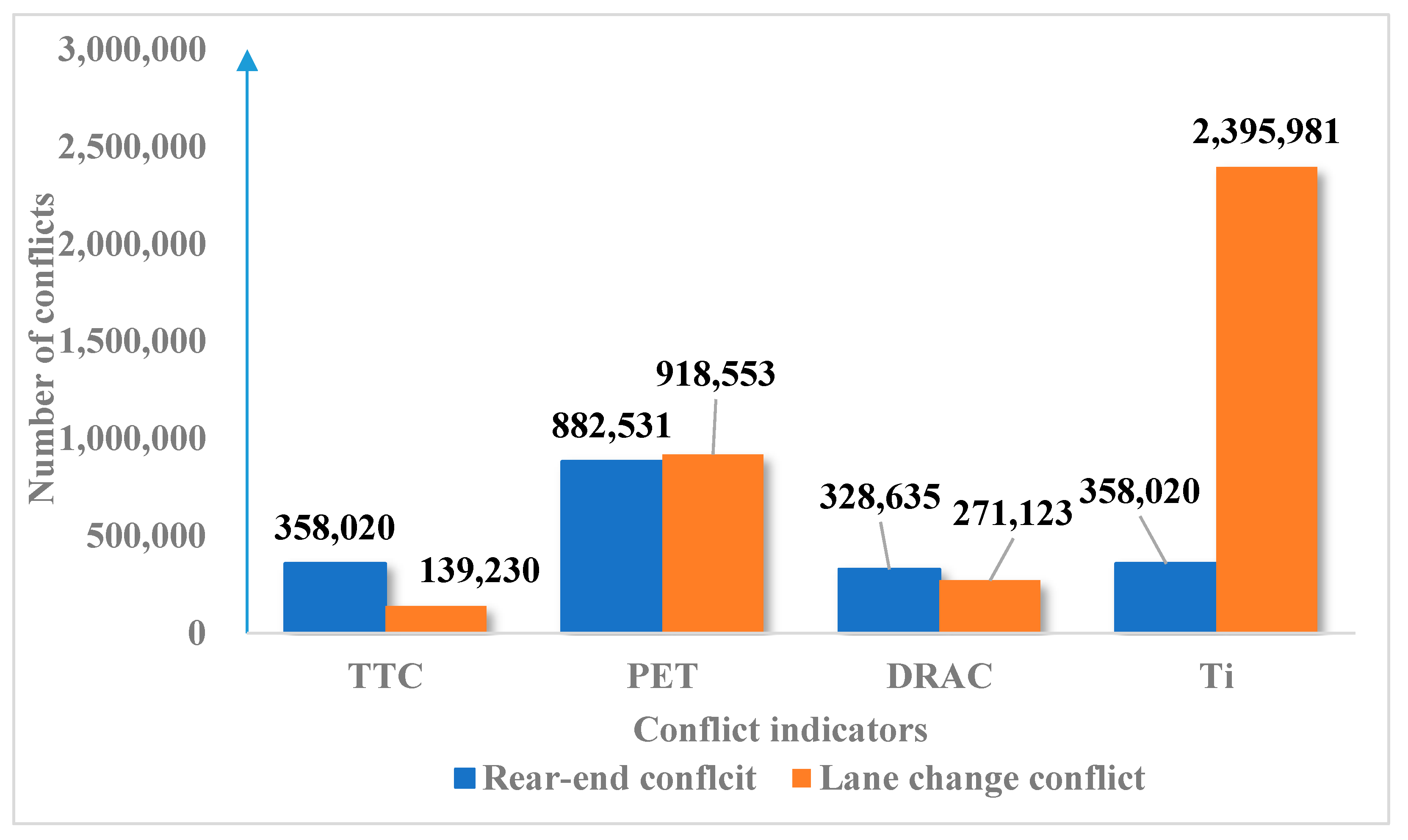
6.2. Proportion of Conflicts and Accidents Based on Various Indicators
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, L.; Ismail, K.; Meng, X. Traffic Conflict Techniques for Road Safety Analysis: Open Questions and Some Insights. Can. J. Civ. Eng. 2014, 41, 633–641. [Google Scholar] [CrossRef]
- Hayward, C. Near-Miss Determination through Use of a Scale of Danger. Highw. Res. Rec. 1972, 384, 24–34. [Google Scholar]
- Michiel, M.; Piet, B. Extended Time-to-collision Measures for Road Traffic Safety Assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar]
- Mahmud, S.S.; Ferreira, L.; Hoque, M.S.; Tavassoli, A. Application of proximal surrogate indicators for safety evaluation: A review of recent developments and research needs. IATSS Res. 2017, 41, 153–163. [Google Scholar] [CrossRef]
- Cunto, F.; Saccomanno, F. Calibration and Validation of Simulated Vehicle Safety Performance at Signalized. Accid. Anal. Prev. 2008, 40, 1171–1179. [Google Scholar] [CrossRef]
- Weng, J.X.; Meng, Q.; Yan, X.D. Analysis of Work Zone Rear-end Crash Risk for Different Vehicle-following Patterns. Accid. Anal. Prev. 2014, 72, 449–457. [Google Scholar] [CrossRef]
- Zhao, P.; Chris, L. Assessing Rear-end Collision Risk of Cars and Heavy Vehicles on Freeways Using a Surrogate Safety Measure. Accid. Anal. Prev. 2018, 113, 149–158. [Google Scholar] [CrossRef]
- Zheng, L.; Tarek, S.; Mohamed, E. Validating the Bivariate Extreme Value Modeling Approach for Road Safety Estimation with Different Traffic Conflict Indicators. Accid. Anal. Prev. 2019, 123, 314–323. [Google Scholar] [CrossRef]
- Hamid, B.; Navid, N.; Hooman, A. Developing a New Surrogate Safety Indicator Based on Motion Equations. Promet Traffic Raffico 2014, 26, 371–381. [Google Scholar]
- Alhajyaseen, M. The Development of Conflict Index for the Safety Assessment of Intersections Considering Crash Probability and Severity. Procedia Comput. Sci. 2014, 32, 364–371. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Xu, C.; Dai, Y. A Crash Prediction Method Based on Bivariate Extreme Value Theory and Video-based Vehicle Trajectory Data. Accid. Anal. Prev. 2019, 123, 365–373. [Google Scholar] [CrossRef]
- Svensson, A.; Hyden, C. Estimating the Severity of Safety Related Behaviour. Accid. Anal. Prev. 2006, 38, 379–385. [Google Scholar] [CrossRef] [PubMed]
- Tarko, A.; Davis, G.; Saunier, N.; Sayed, T.; Washington, S. White Paper Surrogate Measures of Safety; Safety Data Evaluation and Analysis: Washington, DC, USA, 2009.
- Laureshyn, A.; Svensson, A.; Hyden, C. Evaluation of Traffic Safety, Based on Micro-level Behavioural Data: Theoretical Framework and First Implementation. Accid. Anal. Prev. 2010, 42, 1637. [Google Scholar] [CrossRef]
- Hauer, E.; Hakkert, A. The Extent and Implications of Incomplete Accident Reporting. Transp. Res. Rec. 1989, 1186, 1–10. [Google Scholar]
- St-Aubin, P.; Saunier, N. Large-scale Automated Proactive Road Safety Analysis Using: Video Data. Transp. Res. Part C 2015, 58, 363–379. [Google Scholar] [CrossRef]
- Glauz, W.D.; Migletz, D.J. Application of Traffic Conflict Analysis at Intersections; Transportation Research Board: Washington, DC, USA, 1980. [Google Scholar]
- Sun, L.-Y. Research on Urban Road Intersections—Accident Prediction Model and Algorithm; Beijing Jiaotong University: Beijing, China, 2011. [Google Scholar]
- Parker, M.R.; Zegeer, C.V. Traffic Conflict Techniques for Safety and Operations—Observers Manual; Federal Highway Administration: Washington, DC, USA, 1989.
- Xiang, Q.-J.; Lu, J.; Lu, C.; Ge, X. Road Traffic Conflict Analysis Technology and Application; Science Press: Beijing, China, 2008. [Google Scholar]
- Luo, S.-G.; Zhou, W. Research on Road Traffic Conflict Technique. J. Highw. Transp. Res. Dev. 2001, 18, 6–9. [Google Scholar]
- Gettman, D. Surrogate Safety Measures from Traffic Simulation Models, Final Report; Federal Highway Administration: Washington, DC, USA, 2003.
- Muhlrad, N. Traffic Conflict Techniques and Other Forms of Behavioural Analysis: Application to Safety Diagnoses; ICTCT: Salzburg, Austria, 1993. [Google Scholar]
- Lin, L.-P. Research on Traffic Conflict Prediction and Safety Evaluation of Freeway Merging Area; Harbin Institute of Technology: Harbin, China, 2017. [Google Scholar]
- Xiang, Q.-J.; Chuan, L.U.; Qun, W.U.; Jian, L.U. Traffic Safety Evaluation on Highway Intersection Based on Severity Division of Traffic Conflict. J. Highw. Transp. Res. Dev. 2008, 25, 128–131. [Google Scholar]
- Laureshyna, A. In Search of the Severity Dimension of Traffic Events: Extended Delta-v as a Traffic Conflict Indicators. Accid. Anal. Prev. 2017, 98, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Svensson, A. A Method for Analysing the Traffic Process in a Safety Perspective; Lund University: Lund, Sweden, 1998. [Google Scholar]
- Cheol, O.; Taejin, K. Estimation of Rear-end Crash Potential Using Vehicle Trajectory Data. Accid. Anal. Prev. 2010, 42, 1888–1893. [Google Scholar]
- Davis, G.A.; Hourdos, J.; Xiong, H.; Chatterjee, I. Outline for a Causal Model of Traffic Conflicts and Crashes. Accid. Anal. Prev. 2011, 43, 1907–1919. [Google Scholar] [CrossRef]
- Gerald, R.B. Traffic Conflicts for Road User Safety Studies. Can. J. Civ. Eng. 1994, 21, 1–15. [Google Scholar]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S.G.; Energy, S. Surrogate Safety Assessment Model and Validation; Transportation Research Board: Washington, DC, USA, 2008. [Google Scholar]
- Kaan, O.D.; Bekir, B. Derivation and Validation of New Simulation-Based Surrogate Safety Measure. Transp. Res. Rec. J. Transp. Res. Board 2008, 20, 105–113. [Google Scholar]
- Shariat-Mohaymany, A.; Tavakoli-Kashani, A.; Nosrati, H.; Ranjbari, A. Identifying Significant Predictors of Head-on Conflicts on Two-lane Rural Roads Using Inductive Loop Detectors Data. Traffic Inj. Prev. 2011, 12, 636–641. [Google Scholar] [CrossRef] [PubMed]
- Autey, J.; Sayed, T.; Zaki, M.H. Safety Evaluation of Right-turn Smart Channels Using Automated Traffic Conflict Analysis. Accid. Anal. Prev. 2012, 45, 120–130. [Google Scholar] [CrossRef] [PubMed]
- Mamdoohi, A.R.; Fallah Zavareh, M.; Hydén, C.; Nordfjærn, T. Comparative Analysis of Safety Performance Indicators Based on Inductive Loop Detector Data. Traffic Transp. 2014, 26, 139–149. [Google Scholar] [CrossRef] [Green Version]
- Songchitruksa, P.; Tarko, A.P. Practical Method for Estimating Frequency of Right-angle Collisions at Traffic Signals. Transp. Res. Rec. 2006, 1953, 89–97. [Google Scholar] [CrossRef]
- Chongjing, S.; Feifei, X. An Overview of the Conflict Indicators between Vehicles and Pedestrians. J. Transp. Inf. Saf. 2016, 34, 9–16. [Google Scholar]
- Saunier, N.; Sayed, T.; Lim, C. Probabilistic collision prediction for vision-based automated road safety analysis. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Bellevue, WA, USA, 30 September–3 October 2007; pp. 872–878. [Google Scholar]
- Van der Horst, A.R.A.; de Goede, M.; de Hair-Buijssen, S.; Methorst, R. Traffic Conflicts on Bicycle Paths: A Systematic Bbservation of Behaviour from Video. Accid. Anal. Prev. 2014, 62, 358–368. [Google Scholar] [CrossRef]
- Walsh, K. Traffic Conflict Studies: A Tool for Accident Assessment. Highw. Transp. 1986, 33, 22–25. [Google Scholar]
- Glauz, W.D.; Migletz, D.J. Analysis of Traffic Conflict and Collisions. J. Transp. Res. Board 1978, 1, 67–73. [Google Scholar]
- Hauer, E.; Garder, P. Research into the Validity of the Traffic Conflicts Technique. Accid. Anal. Prev. 1986, 18, 471. [Google Scholar] [CrossRef]
- Karim, E.B.; Tarek, S. Safety Performance Functions Using Traffic Conflicts. Saf. Sci. 2013, 51, 160–164. [Google Scholar]
- Williams, M.J. Validity of the Traffic Conflicts Technique. Accid. Anal. Prev. 1981, 13, 133–145. [Google Scholar] [CrossRef]
- Tiwari, G.; Mohan, D.; Fazio, J. Conflict Analysis for Prediction of Fatal Crash Locations in Mixed Traffic Streams. Accid. Anal. Prev. 1998, 30, 207–215. [Google Scholar] [CrossRef]
- Guo, Y.-Y. Safety Evaluation Technology of Signalized Intersection Based on Traffic Conflict Theory; Southeast University: Nanjing, China, 2016. [Google Scholar]
- Shahdah, U.; Saccomanno, F.; Persaud, B. Application of Traffic Microsimulation for Evaluating Safety Performance of Urban Signalized Intersections. Transp. Res. Part C Emerg. Technol. 2015, 60, 96–104. [Google Scholar] [CrossRef]
- Peesapati, L.N.; Hunter, M.P.; Rodgers, M.O. Evaluation of Post Encroachment Time as Surrogate for Opposing Left-turn Crashes. Transp. Res. Rec. 2013, 2386, 42–51. [Google Scholar] [CrossRef] [Green Version]
- Zou, Y.; Lin, B.; Yang, X.; Wu, L.; Muneeb Abid, M.; Tang, J. Application of the Bayesian Model Averaging in Analyzing Freeway Traffic Incident Clearance Time for Emergency Management. J. Adv. Transp. 2021, 2021, 6671983. [Google Scholar] [CrossRef]
- Arun, A.; Haque, M.M.; Bhaskar, A.; Washington, S.; Sayed, T. A systematic mapping review of surrogate safety assessment using traffic conflict techniques. Accid. Anal. Prev. 2021, 153, 106016. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification of Conflict Indicators | Typical Indicator | Advantages | Limitations | Suitable Environment |
|---|---|---|---|---|
| Indicators of risk aversion behavior | Signs of conflict (lights on for steering and braking) [19] | Intuitive and straightforward, ideal for early situations where high-precision equipment is not available. | Difficult to define and observe with high precision quantitatively [1]. | Traffic conflict observations suitable for manual investigation. |
| Indicators based on proximity in space and time | Distance indicators (collision distance [20], non-full stopping distance [21], parking distance ratio [22]) | Simpler to calculate than time indicators. | If distance and speed are considered separately, there may be situations where distance and speed are both very small / large, for which traffic conflicts may not be severe. Time indicators that consider both distance and speed factors are more scientific indicators. | Currently less frequently used, replaced by time indicators. |
| Speed indicators (conflicting vehicle speeds) | ||||
| Time indicators (TTC and derived indicators such as TIT, TET, TA [2,3]) | Capable of calculating the process of conflict between the vehicles at various time intervals. | It is more difficult to identify vehicles that encounter angled lane change conflicts, and the risk of Non-Collision Course is neglected [27,28]. TTC was more informative than PET [4]. | More applicable to conflicts between vehicles on the same trajectory, that is rear-end conflicts. | |
| Time indicators (PET-derived indicators [23,24,25]) | Simple definition, with no need to calculate a collision course, but only a common area, unlike TTC. | Only applicable to calculations when the rear vehicle passes through the common area, i.e., in post-conflict estimation, but not applicable to pre-conflict estimation [29] Real-time microscopic data of the two vehicles are not taken into account; not applicable to studies of the interaction between vehicles (In a situation where the rear car is slower than the front car, it still considers the scenario risky even though logically no collision would take place). | Better suited for studies on conflicts due to vehicle merging at intersections. | |
| Time indicators [26] | Combines advantages of TTC and PET indicators | Application still at the theoretical stage and needs to be supported by more data. | Wider application scope compared to TTC and PET indicators. | |
| Indicators of vehicle’s own movement characteristics | Deceleration Rate to Avoid Crash (DRAC) [5] | Similar to TTC, DRAC reflects the risk of a Rear-end conflict per vehicle in most cases | ||
| Research Literature | Conflict Indicators | Type of Road Facility | Serious Conflict Threshold |
|---|---|---|---|
| Brown (1994) [30] | TTC | Intersection | 1.5 s |
| Svensson (1998) [27] | TTC | Intersection | 1.5 s |
| GETTMAN D et al. [31] | PET | / | 5.0 s |
| Ozbayet et al. (2008) [32] | Modified TTC | Road section | 4.0 s |
| Gurleyet et al. (2011) [33] | TTC | Road section | 3.0 s |
| Auteyet et al. (2012) [34] | TTC | Intersection | 3.0 s |
| Amir Reza Mamdoohi et al. (2014) [35] | TH | / | 2.0 s |
| TTC | 1.5 s | ||
| PSD | 1 m | ||
| DRAC | 3.4 m/s2 |
| Segment | Location of Capture | On-Site Pictures | Road Conditions |
|---|---|---|---|
| 1 | K51 + 500 K52 + 200 |  | Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h |
| 2 | K57 + 580 K58 + 600 |  | Located in a traffic diversion zone, widened on both sides, temporary guardrails and cones on both sides, speed limit 80 km/h |
| Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h | |||
| 3 | K112 + 500 |  | Normal road, widened on both sides, temporary guardrail on both sides, speed limit 80 km/h |
| 4 | K130 + 500 K131 + 500 K133 + 200 |   | Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h |
| 5 | K182 + 000 K186 + 000 |  | Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h |
| 6 | K192 + 500 |  | Normal road, widened on both sides, temporary guardrail on both sides, speed limit 80 km/h |
| 7 | K255 + 000 K257 + 700 K258 + 260 |   | Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h |
| Normal road, widened on both sides, temporary guardrail on both sides, speed limit 80 km/h | |||
| Located in a traffic diversion zone, with intersections, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h | |||
| 8 | K266 + 800 |  | Normal road, widened on both sides, temporary guardrail on both sides, speed limit 80 km/h |
| 9 | K271 + 620 K278 + 300 |  | Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h |
| 10 | K287 + 000 |  | Normal road, widened on both sides, temporary guardrail and cones on both sides, speed limit 80 km/h |
| Location | Video Frames | Video Duration (s) | Vehicles Identified Initially | Vehicles Tracked Continuously | Vehicles by Manual Observation | Initial Recognition Rate (%) | Continuous Tracking Rate (%) |
|---|---|---|---|---|---|---|---|
| K51 + 500 | 33,420 | 1114 | 175 | 165 | 186 | 94.1 | 88.7 |
| K52 + 200 | 27,030 | 901 | 167 | 158 | 172 | 97.1 | 91.9 |
| K112 + 500 | 89,880 | 2996 | 491 | 476 | 543 | 90.4 | 87.7 |
| K131 + 500 | 51,930 | 1731 | 223 | 211 | 247 | 90.3 | 85.4 |
| K133 + 500 | 63,990 | 2133 | 373 | 360 | 388 | 96.1 | 92.8 |
| Total | 266,250 | 8875 | 1429 | 1370 | 1536 | 93.0 | 89.2 |
| Number | Time of Accident Occurrence | Location of Accident Occurrence (Stake Number/Orientation) | Vehicle Type of Accident | Type of Accident | Weather | Level of Severity | Number of Death | Number of Injured | Road Financial Loss ($) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2016/9/15 | Direction from Qingdao to Jinan K64 + 700 | small car and truck | raer-end | sunny | slight | 0 | 0 | 120 |
| 2 | 2016/9/20 | Direction from Qingdao to Jinan K81 + 100 | small car and small car | raer-end | sunny | ordinary | 0 | 0 | 715 |
| 3 | 2016/9/24 | Direction from Jinan to Qingdao K105 + 200 | truck | roll-over | sunny | ordinary | 0 | 0 | 415 |
| 4 | 2016/9/24 | Direction from Qingdao to Jinan K81 + 180 | small car | roll-over | sunny | ordinary | 0 | 0 | 280 |
| 5 | 2016/9/27 | Direction from Jinan to Qingdao K101 + 600 | small car | roll-over | sunny | ordinary | 0 | 0 | 580 |
| 6 | 2016/9/29 | Direction from Qingdao to Jinan K55 + 100 | truck | fire | sunny | ordinary | 0 | 0 | 1760 |
| 7 | 2016/10/1 | Direction from Qingdao to Jinan K76 + 100 | small car | hit the central partition guardrail | sunny | ordinary | 0 | 0 | 980 |
| 8 | 2016/10/5 | Direction from Jinan to Qingdao K44 + 100 | truck and truck | raer-end | sunny | ordinary | 0 | 0 | 515 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, R.; Zhu, S.; Chang, H.; Wu, J.; Ding, N.; Liu, B.; Qiu, J. Determining an Improved Traffic Conflict Indicator for Highway Safety Estimation Based on Vehicle Trajectory Data. Sustainability 2021, 13, 9278. https://doi.org/10.3390/su13169278
Jiang R, Zhu S, Chang H, Wu J, Ding N, Liu B, Qiu J. Determining an Improved Traffic Conflict Indicator for Highway Safety Estimation Based on Vehicle Trajectory Data. Sustainability. 2021; 13(16):9278. https://doi.org/10.3390/su13169278
Chicago/Turabian StyleJiang, Ruoxi, Shunying Zhu, Hongguang Chang, Jingan Wu, Naikan Ding, Bing Liu, and Ji Qiu. 2021. "Determining an Improved Traffic Conflict Indicator for Highway Safety Estimation Based on Vehicle Trajectory Data" Sustainability 13, no. 16: 9278. https://doi.org/10.3390/su13169278