
Dynamic Inventory Routing and Pricing Problem with a Mixed Fleet of Electric and Conventional Urban Freight Vehicles

Abstract
:1. Introduction
- (1)
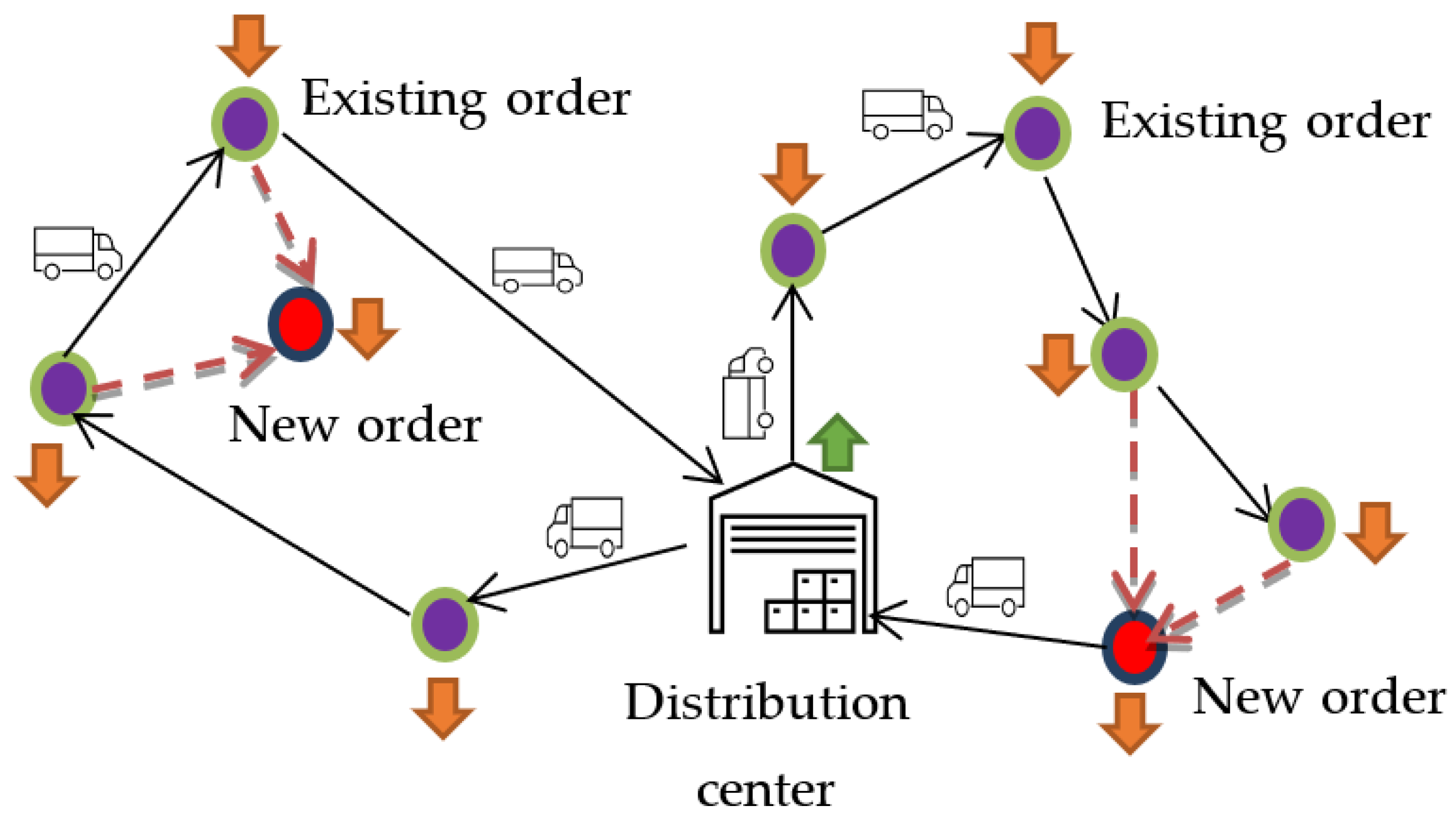
- We propose a non-myopic dynamic inventory routing and pricing problem under a mixed fleet of electric and conventional vehicles.
- (2)
- We introduce a heterogeneous fleet of vehicles and use a realistic energy consumption that considers vehicle speed, cargo load and gradients, vehicle miles traveled (VMT), vehicle emissions, and charging costs.
- (3)
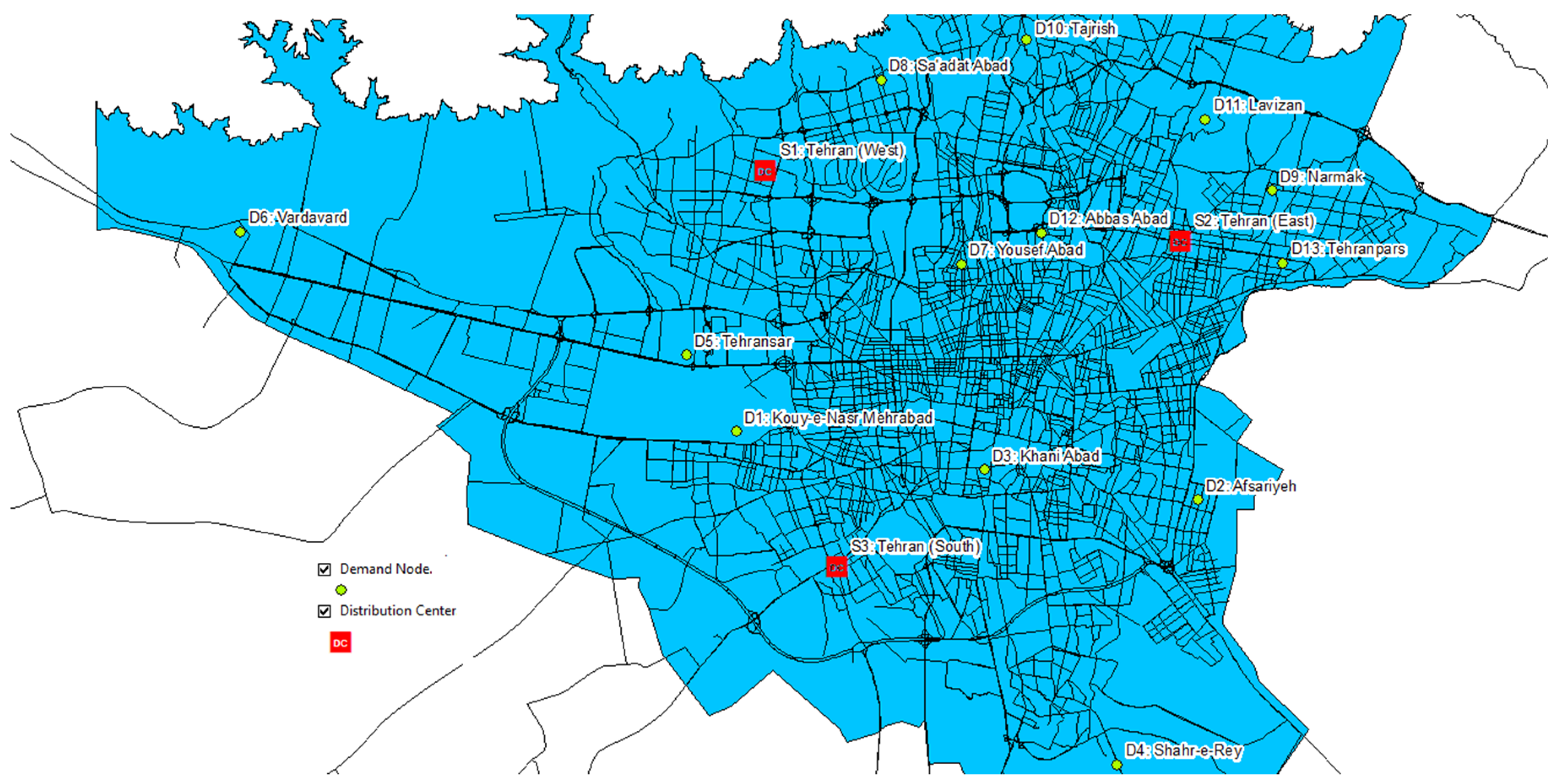
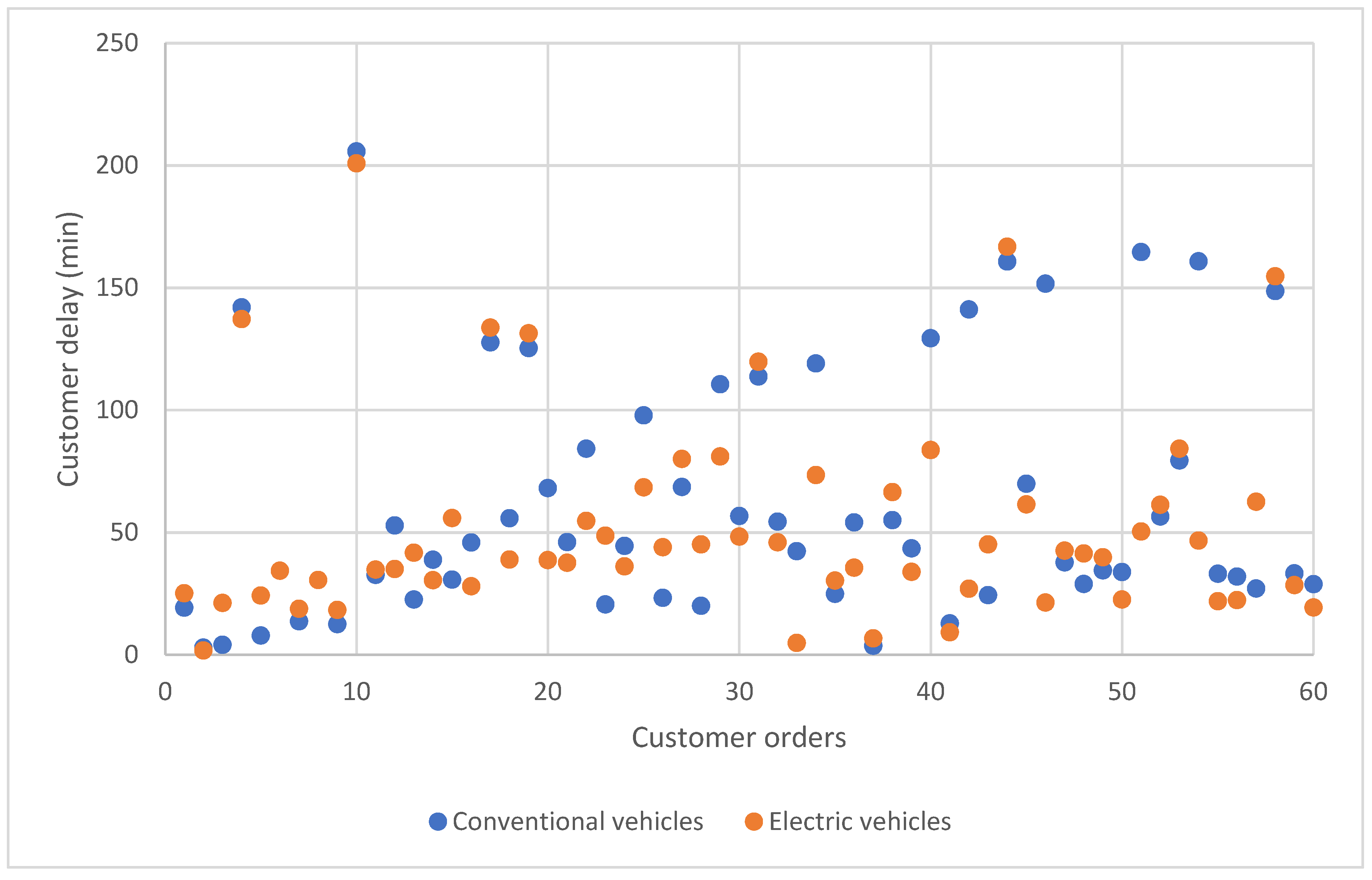
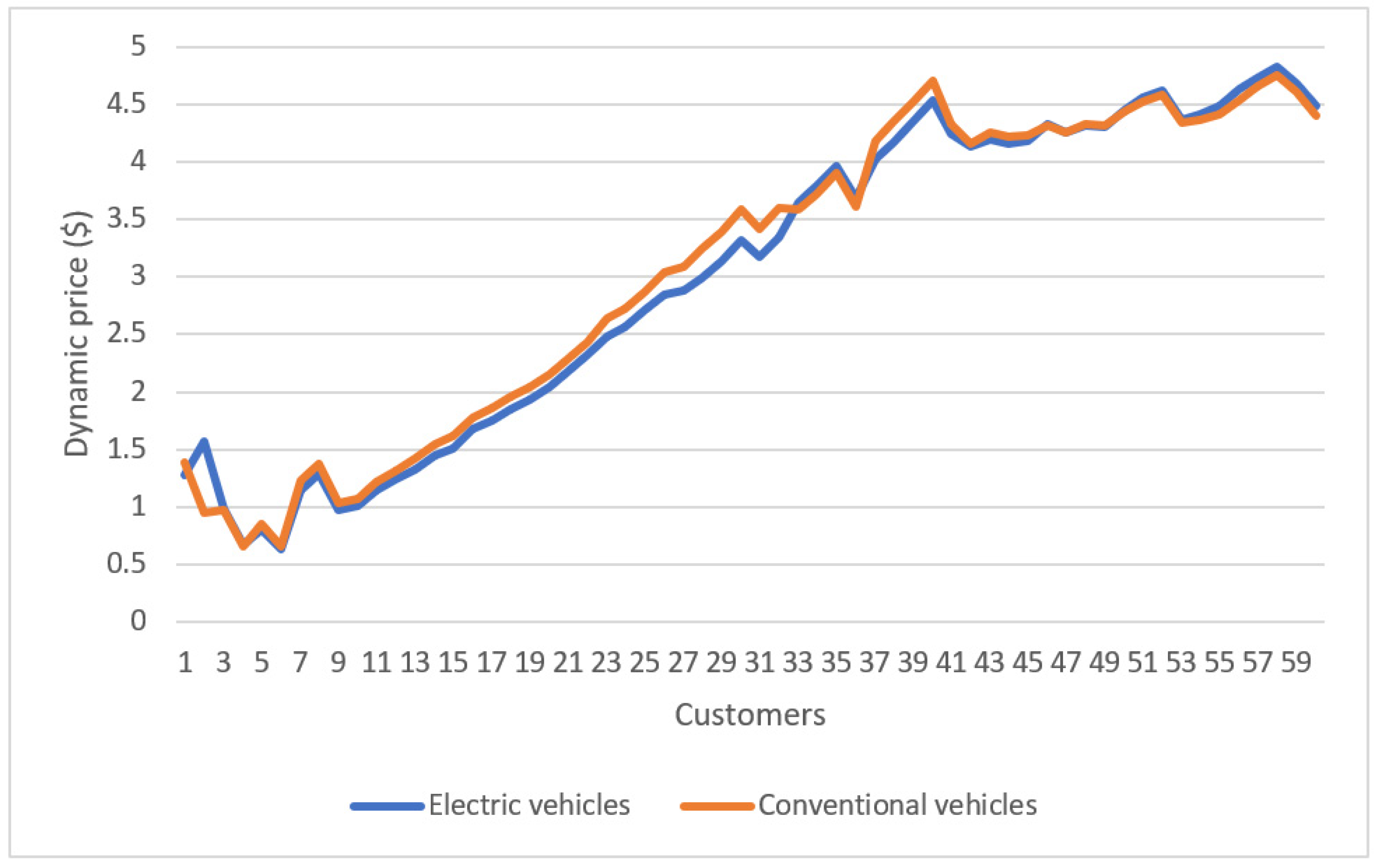
- An empirical study is conducted on real data generated from a delivery dataset in Tehran that investigates both fleet sizing (conventional and electric vehicles) and allocation aiming at maximizing social welfare. The results show that the number of served customers and customer delay would be affected by transitioning conventional vehicles to electric vehicles.
2. Literature Review
3. The Mathematical Model
3.1. Energy Consumption
3.2. Incorporating Uncertainty
3.2.1. Mathematical Formulation
| Algorithm 1. Integrated optimization of vehicle routing, transportation, and inventory with the mixed fleet of vehicles |
| Step 0. Initialization: Input parameters. For |
| For : |
| Step 1. |
| Update |
| Step 2. |
| Compute |
| Step 3. |
| Calculate |
| end |
| end |
4. Results
4.1. Data Collection
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Masood, K.; Zoppi, M.; Fremont, V.; Molfino, R.M. From Drive-By-Wire to Autonomous Vehicle: Urban Freight Vehicle Perspectives. Sustainability 2021, 13, 1169. [Google Scholar] [CrossRef]
- Felipe, A.; Ortuño, M.T.; Righini, G.; Tirado, G. A heuristic approach for the green vehicle routing problem with multiple technologies and partial recharges. Transp. Res. Part E Logist. Transp. Rev. 2014, 71, 111–128. [Google Scholar] [CrossRef]
- Schiffer, M.; Walther, G. The electric location routing problem with time windows and partial recharging. Eur. J. Oper. Res. 2017, 260, 995–1013. [Google Scholar] [CrossRef]
- Conrad, R.G.; Figliozzi, M.A. The Recharging Vehicle Routing Problem. In Proceedings of the Industrial Engineering Research Conference; Doolen, T., Aken, E.V., Eds.; Institute of Industrial Engineers: Norcross, GA, USA, 2011; pp. 2785–2792. [Google Scholar]
- Preis, H.; Frank, S.; Nachtigall, K. Energy-optimized routing of electric vehicles in urban delivery systems. In Proceedings of the Operations Research; Helber, S., Breitner, M., Rösch, D., Schön, C., von der Schulenburg, J.-M.G., Sibbertsen, P., Steinbach, M., Weber, S., Wolter, A., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 583–588. [Google Scholar] [CrossRef]
- Schneider, M.; Stenger, A.; Goeke, D. The electric vehicle-routing problem with time windows and recharging stations. Transp. Sci. 2014, 48, 500–520. [Google Scholar] [CrossRef]
- Goeke, D.; Schneider, M. Routing a mixed fleet of electric and conventional vehicles. Eur. J. Oper. Res. 2015, 245, 81–99. [Google Scholar] [CrossRef]
- Soysal, M.; Belbag, S.; Sel, C. A closed vendor managed inventory system under a mixed fleet of electric and conventional vehicles. Comput. Ind. Eng. 2021, 156, 107210. [Google Scholar] [CrossRef]
- Montoya, A.; Guéret, C.; Mendoza, J.E.; Villegas, J.G. The electric vehicle routing problem with nonlinear charging function. Transp. Res. Part B Methodol. 2017, 103, 87–110. [Google Scholar] [CrossRef] [Green Version]
- Hiermann, G.; Puchinger, J.; Ropke, S.; Hartl, R.F. The electric fleet size and mix vehicle routing problem with time windows and recharging stations. Eur. J. Oper. Res. 2016, 252, 995–1018. [Google Scholar] [CrossRef] [Green Version]
- Hiermann, G.; Hartl, R.F.; Puchinger, J.; Vidal, T. Routing a mix of conventional, plug-in hybrid, and electric vehicles. Eur. J. Oper. Res. 2019, 272, 235–248. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Chen, M.; Zhang, W. A novel location-routing problem in electric vehicle transportation with stochastic demands. J. Clean. Prod. 2019, 221, 567–581. [Google Scholar] [CrossRef]
- Keskin, M.; Çatay, B.; Laporte, G. A Simulation-Based Heuristic for the Electric Vehicle Routing Problem with Time Windows and Stochastic Waiting Times at Recharging Stations. Comput. Oper. Res. 2020. [Google Scholar] [CrossRef]
- Kullman, N.; Goodson, J.; Mendoza, J.E. Electric Vehicle Routing with Public Charging Stations. Technical Report. ffhal-01928730v2. 2021. Available online: https://hal.archives-ouvertes.fr/hal-01928730v2/document (accessed on 24 March 2021).
- Schiffer, M.; Walther, G. Strategic planning of electric logistics networks: A robust location routing approach. Omega 2018, 80, 31–42. [Google Scholar] [CrossRef]
- Pelletier, S.; Jabali, O.; Laporte, G. The electric vehicle routing problem with energy consumption uncertainty. Transp. Res. Part B Methodol. 2019, 126, 225–255. [Google Scholar] [CrossRef]
- Adler, J.D.; Mirchandani, P.B. Online routing and battery reservations for electric vehicles with swappable batteries. Transport. Res. Part B Method. 2014, 70, 285–302. [Google Scholar] [CrossRef]
- Sayarshad, H.R.; Mahmoodian, V. An intelligent method for dynamic distribution of electric taxi batteries between charging and swapping stations. Sustain. Cities Soc. 2021, 65, 102605. [Google Scholar] [CrossRef]
- Fontana, M.W. Optimal Routes for Electric Vehicles Facing Uncertainty, Congestion, and Energy Constraints. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. Available online: https://core.ac.uk/download/pdf/19879328.pdf (accessed on 9 August 2013).
- Fang, X.; Du, Y.; Qiu, Y. Reducing carbon emissions in a closed-loop production routing problem with simultaneous pickups and deliveries under carbon cap-and-trade. Sustainability 2017, 9, 2198. [Google Scholar] [CrossRef] [Green Version]
- Kuvvetli, Y.; Erol, R. Coordination of production planning and distribution in closed loop supply chains. Neural Comput. Appl. 2020, 1–19. [Google Scholar] [CrossRef]
- Barth, M.; Boriboonsomsin, K. Real-world CO2 impacts of traffic congestion. Transp. Res. Rec. J. Transp. Res. Board 2008, 2058, 163–171. [Google Scholar] [CrossRef] [Green Version]
- Barth, M.; Younglove, T.; Scora, G. Development of a Heavy-Duty Diesel Modal Emissions and Fuel Consumption Model; California PATH Program, Institute of Transportation Studies, University of California at Berkeley, 2005; Available online: https://escholarship.org/uc/item/67f0v3zf (accessed on 1 January 2005).
- Demir, E.; Bektas, T.; Laporte, G. A comparative analysis of several vehicle emission models for road freight transportation. Transp. Res. Part D Transp. Environ. 2011, 16, 347–357. [Google Scholar] [CrossRef]
- Franceschetti, A.; Honhon, D.; Van Woensel, T.; Bektas, T.; Laporte, G. The time dependent Pollution-Routing problem. Transp. Res. Part B Methodol. 2013, 56, 265–293. [Google Scholar] [CrossRef] [Green Version]
- Asamer, J.; Graser, A.; Heilmann, B.; Ruthmair, M. Sensitivity analysis for energy demand estimation of electric vehicles. Transp. Res. Part D Transp. Environ. 2016, 46, 182–199. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S.; Faris, H. MTDE: An effective multi-trial vector-based differential evolution algorithm and its applications for engineering design problems. Appl. Soft Comput. 2020, 97, 106761. [Google Scholar] [CrossRef]
- Peng, T.; Yang, X.; Xu, Z.; Liang, Y. Constructing an Environmental Friendly Low-Carbon-Emission Intelligent Transportation System Based on Big Data and Machine Learning Methods. Sustainability 2018, 12, 8118. [Google Scholar] [CrossRef]
- Murakami, K. A new model and approach to electric and diesel-powered vehicle routing. Transp. Res. Part E 2017, 107, 23–37. [Google Scholar] [CrossRef]
- Sayarshad, H.R.; Mahmoodian, V.; Gao, H.O. Dynamic non-myopic routing of electric taxis with battery swapping station. Sustain. Cities Soc. 2020. [Google Scholar] [CrossRef]
- Hwang, J.; Lee, J.S.; Kho, S.; Kim, D. Hierarchical hub location problem for freight network design. IET Intell. Transp. Syst. 2018, 12. [Google Scholar] [CrossRef]
- Sayarshad, H.R.; Sattar, S.; Gao, H.O. A scalable non-myopic atomic game for smart parking mechanism. Transp. Res. Part E Logist. Transp. Rev. 2020, 140, 101974. [Google Scholar] [CrossRef]
- Wang, M.; Wang, Y.; Liu, W.; Ma, Y.; Xiang, L.; Yang, Y.; Li, X. How to achieve a win–win scenario between cost and customer satisfaction for cold chain logistics? Phys. A 2021, 566, 125637. [Google Scholar] [CrossRef]
- Lee, M.; Hong, J.; Cheong, T.; Lee, H. Flexible Delivery Routing for Elastic Logistics: A Model and an Algorithm. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Studies | Model Feature(s) |
|---|---|
| [19] | Incorporated energy consumption in a myopic electric routing problem while not considering vehicle loads. |
| [20] | Introduced mixed-integer linear programming for the probabilistic inventory routing problem with a homogenous vehicle that considers emissions and energy consumption. |
| [16] | Minimized the total costs of a myopic electric routing problem. |
| [21] | Introduced mixed-integer linear programming for a production inventory and delivery problem with a heterogeneous vehicle while not considering energy consumption and environmental concerns. |
| [18] | Maximized social welfare for the non-myopic distribution of the electric battery problem with homogeneous vehicles while not considering energy consumption, vehicle loads, and environmental concerns. |
| Current paper | Integrated the non-myopic dynamic optimization of routing, transportation, and inventory with a heterogeneous fleet of vehicles that considers energy consumption and environmental impacts. |
| Symbol | Description | ||
|---|---|---|---|
| Indices and sets | |||
| vertex | the fuel-to-air mass ratio | ||
| supply nodes | the heating value of a typical diesel fuel | ||
| time periods | the conversion factor | ||
| the set of all points in the network | |||
| the set of the supply nodes, | expected air drag coefficient | ||
| the set of the demand nodes, | expected air density | ||
| the current location of the trucks, | frontal area | ||
| the dummy end node that all trucks will go to at the end of their tour, | |||
| the set of needed steps to finish the delivery | efficiency parameter for diesel engines | ||
| the number of orders of customer nodes | |||
| maximum supply nodes | rolling friction coefficient | ||
| the capacity of the truck | road angle (rad) | ||
| an initial load of the truck | gravitational constant | ||
| the distance between points and | curb-weight (kg) | ||
| truck speed (km/h) | the weight of a full load of items | ||
| the energy consumption cost of a conventional vehicle | |||
| the engine displacement | the energy consumption cost of an electric vehicle | ||
| the engine speed | auxiliary power demand () | ||
| the engine friction factor | vehicle drivetrain efficiency | ||
| type of fuel , where 1 refers to conventional freight vehicles and 2 refers to electric freight vehicles, | |||
| Decision variables | |||
| if the truck goes from to at step 1; otherwise 0 | |||
| the number of loaded items on the truck going from to at step | |||
| the number of loaded items in by the truck at time period | |||
| the number of unloaded items in by the truck at time period | |||
| Parameter | Description | Value | Parameter | Description | Value |
|---|---|---|---|---|---|
| 33 | the weight of a full load of items | 20 kg | |||
| engine displacement | 5 | the energy consumption cost of a conventional vehicle | 1.4 | ||
| engine speed | 33 | the energy consumption cost of an electric vehicle | 0.2 | ||
| engine friction factor | 0.2 | auxiliary power demand () | 1575 | ||
| 0.00003 | vehicle drivetrain efficiency | 0.4 | |||
| fuel-to-air mass ratio (air–fuel equivalence ratio (AFR), , is the ratio of actual AFR to stoichiometry for a given mixture is at stoichiometry [29,30]) | 1 | the number of orders | 3951 items | ||
| heating value of a typical diesel fuel | 44 ( | the rate of waiting cost | $1 | ||
| conversion factor | 737 ( | the number of supply points | 30 | ||
| (conventional and electrical trucks) | 2.889840, 1.6486537 | the number of demand points | 5 | ||
| expected air drag coefficient (conventional and electrical trucks) | 0.6, 0.7 | the capacity of items at supply nodes | 2500, 2000, 3000 | ||
| expected air density | 1.2041 | the number of vehicles | 10 | ||
| frontal area (conventional and electrical trucks) | 8, 3.912 | a reward for service | 15 | ||
| 0.005 | a weight | 0.5 | |||
| efficiency parameter for diesel engines | 0.5 | the service rate | 6 | ||
| 0.0981 | the aggregate arrival rate | 4 | |||
| rolling friction coefficient | 0.01 | vehicle capacity | 100 | ||
| road angle (rad) | 0 | the value of time | 0.33 | ||
| gravitational constant | 9.81() | degree of look-ahead | 0.2 | ||
| curb-weight (kg) | 6350 kg | the set of needed steps to finish the plan | 25 | ||
| vehicle speed () | 40 |
| Vehicles | Optimal Routes and Replenishment Times and Amounts |
|---|---|
| Route: S1–D3–S3–D3–S3–D3–S3–D3–S3–D1–S3–D1–S3–D6–S3–D6 | |
| Time: 6.96–30.53–33.39–36.26–39.13–42.00–44.87–47.73–50.60–75.26–85.73–96.20–106.68–144.11–177.87–211.63 | |
| Load/unload: 80, 42, −42, 57, −57, 19, −19, 73, −73, 80, −80 | |
| Route: S2–D7–S3–D7–S3–D7–S3–D7–S3–D7–S3–D7 | |
| Time: 10.33–28.66–37.54–46.42–55.30–64.18–73.06–81.94–90.83–99.71–108.59–117.47 | |
| Load/unload: 61, −61, 76, −76, 80, −80, 80, −80, 14, −14, 80, −80 | |
| Route: S3–D3–S3–D4–S3–D8–S1–D8–S1–D8–S1–D8–S1–D8–S1–D8 | |
| Time: 1.70–4.77–7.64–26.83–46.01–64.53–66.71–68.89–71.07–73.25–75.43–77.62–79.80–81.98–84.16–86.34 | |
| Load/unload: 66, −25, 25, −66, 55, −55, 46, −46, 80, −80, 80, −80, 80, −80, 80, −80 | |
| Route: S1–D13–S2–D11–S2–D13–S2–D13–S2–D11–S2–D13–S2–D13 | |
| Time: 7.10–31.27–39.13–43.17–47.22–55.07–62.93–70.78–78.64–82.68–86.73–94.58–102.44–110.29 | |
| Load/unload: 73, −73, 62, −62, 79, −79, 80, −80, 44, −44, 80, −80, 80, −80 | |
| Route: S3–D1–S3–D2–S3–D2 | |
| Time: 36.14–46.62–57.09–70.75–84.41–98.07 | |
| Load/unload: 75, −75, 24, −24, 64, −64 | |
| Route: S3–D11–S2–S2–D10–S1–D10–S1–D10–S1–D10–S1–D10–S1–D10–S1–D10 | |
| Time: 4.96–26.15–30.19–35.30–48.96–57.06–65.16–73.26–81.37–89.47–97.57–105.67–113.77–121.87–129.97–138.07–146.17 | |
| Load/unload: 54, −54, 21, 4, −25, 80, −80, 80, −80, 80, −80, 80, −80, 80, −80, 63, −63 | |
| Route: S1–D5–S3–D12–S3–D12–S3–D12–S3–D12–S3–D12 | |
| Time: 8.24–26.97–41.08–52.73–64.39–76.04–87.69–99.35–111.00–122.66–134.31–145.97 | |
| Load/unload: 55, −55, 77, −77, 80, −80, 80, −80, 80, −80, 36, −36 | |
| Route: S2–S3–D1–S3–D11–S2–D11–S3–D4 | |
| Time: 12.52–37.06–47.54–58.01–79.19–83.24–87.28–108.46–127.65 | |
| Load/unload: 35, 35, −70, 56, −56, 58, −58, 57, −57 | |
| Route: S3–D5–S3–D9–S2–D9–S1–D6–S1–D6 | |
| Time: 10.81–55.73–69.41–90.61–94.79–98.96–121.10–154.85–188.61–222.37 | |
| Load/unload: 61, −33, 27, −55, 80, −80, 80, −80, 80, −80 | |
| Route: S1–D9–S2–D9–S2–S2–D10–S1–D10–S1–D10–S1–D10 | |
| Time: 10.17–32.31–36.48–40.66–44.84–47.85–61.51–69.61–77.71–85.81–93.91–102.01–110.11 | |
| Load/unload: 44, −44, 80, −80, 66, 5, −71, 80, −80, 62, −62, 80, −80 |
| Vehicles | Optimal Routes and Replenishment Times and Amounts |
|---|---|
| Route: S1–D3–S3–D3–S3–D3–S3–S3–D1–S3–D6–S1–D6 | |
| Time: 6.96–30.53–33.39–36.26–39.13–42.00–44.87–90.55–101.02–111.49–148.93–182.69–216.45 | |
| Load/unload: 57, −57, 80, −80, 43, −43, 57, 19, −76, 73, −73, 80, −80 | |
| Route: S2–D11–S2–S3–D7–S3–D7–S3–D7–S3–D7–S3–D7 | |
| Time: 4.96–9.01–20.06–45.97–54.85–63.73–72.61–81.49–90.37–99.26–108.14–117.02–125.90 | |
| Load/unload: 54, −54, 56, 24, −80, 80, −80, 80, −80, 80, −80, 10, −10 | |
| Route: S3–D4–S3–D3–S3–S1–D10–S1–D10–S1–D10–S1–D10–S1–S10–S1–D10–S1–D10–S1–D10–S1–D10–S1–D10 | |
| Time: 1.70–20.89–41.84–44.71–48.77–70.33–78.43–86.54–94.64–102.74–110.84–118.94–127.04–135.14–143.24–151.34–159.44–167.54–175.64–183.74–191.84–199.95–208.05–216.15–224.25 | |
| Load/unload: 66, −66, 53, −42, 5, 64, −80, 61, −61, 80, −80, 80, −80, 80, −80, 80, −80, 80, −80, 80, −80, 80, −80, 80, −80 | |
| Route: S1–D9–S2–D9–S2–D2–S3–D2 | |
| Time: 10.17–32.31–36.48–40.66–44.84–65.34–78.99–92.65 | |
| Load/unload: 44, −44, 80, −80, 24, −24, 64, −64 | |
| Route: S2–D13–S1–D8–S1–D8–S1–D8–S1–D9–S2–D9 | |
| Time: 7.10–14.95–41.61–43.79–45.97–48.15–50.34–52.52–56.04–78.17–82.35–86.53 | |
| Load/unload: 73, −73, 80, −80, 55, −55, 80, −80, 76, −76, 59, −59 | |
| Route: S3–D3–S3–D13–S2–D13–S2–D13–S2–D13–S2–D13 | |
| Time: 3.04–5.91–16.30–36.02–43.87–51.73–59.58–67.44–75.29–83.15–91.00–98.86 | |
| Load/unload: 25, −25, 75, −75, 4, −4, 80, −80, 80, −80, 80, −80 | |
| Route: S1–D7–S3–D10–S3–D12–S3–D12–S3–D12–S3–D12 | |
| Time: 10.33–22.80–36.28–47.93–59.59–71.24–82.90–94.55–106.21–117.86–129.52–141.17 | |
| Load/unload: 61, −61, 80, −80, 72, −72, 80, −80, 80, −80, 41, −41 | |
| Route: S2–D1–S3–D1–S1–D8–S1–D8–S1–D8 | |
| Time: 11.85–44.43–54.91–65.38–86.64–88.82–91.00–93.19–95.37–97.55 | |
| Load/unload: 75, −75, 70, −70, 80, −80, 80, −80, 46, −46 | |
| Route: S3–D5–S3–S2–D11–S2–D11–S2–D11 | |
| Time: 8.24–21.92–52.03–76.62–80.66–84.71–88.75–92.80–96.84 | |
| Load/unload: 55, −55, 38, 42, −80, 80, −80, 60, −60 | |
| Route: S1–D5–S3–D4–S3–D6–S1–D6 | |
| Time: 10.81–59.33–73.01–92.19–111.38–148.81–182.57–216.33 | |
| Load/unload: 61, −33, 29, −57, 80, −80, 80, −80 |
| Prob. | Fleet Size | Only Electric Vehicles | Only Conventional Vehicles |
|---|---|---|---|
| 1 | 9 | VMT: 975.13 (km) SW: 3147.796 Customer delay: 62.56 (min) | VMT: 992.93 (km) Emissions: CO2 (447,305.04 g), NOx (223.41 g) SW: 3152.628 Customer delay: 57.08 (min) |
| 2 | 10 | VMT: 1037.367 (km) SW: 3156.63 Customer delay: 52.54 (min) | VMT: 1005.387 (km) Emissions: CO2 (452,916.79 g), NOx (226.21 g) SW: 3147.942 Customer delay: 62.39 (min) |
| 3 | 11 | VMT:1051.61 (km) SW: 3160.41 Customer delay: 48.56 (min) | VMT: 1012.495 (km) Emissions: CO2 (456,118.87 g), NOx (227.81 g) SW: 3158.874 Customer delay: 50 (min) |
| 4 | 12 | VMT: 1045.708 (km) SW: 3163.442 Customer delay: 44.82 (min) | VMT: 1061.988 (km) Emissions: CO2 (478,414.97 g), NOx (238.95 g) SW: 3164.159 Customer delay: 44.011 (min) |
| 5 | 13 | VMT: 1041.121 (km) SW: 3165.474 Customer delay: 42.52 (min) | VMT: 1037.963 (km) Emissions: CO2 (467,591.95 g), NOx (233.54 g) SW: 3169.412 Customer delay:38.05 (min) |
| 6 | 14 | VMT: 1141.817 (km) SW:3 168.571 Customer delay: 39 (min) | VMT: 1064.196 (km) Emissions: CO2 (479,409.66 g), NOx (239.44 g) SW: 3166.278 Customer delay: 41.60 (min) |
| 7 | 15 | VMT: 1131.038 (km) SW: 3168.771 Customer delay: 38.78 (min) | VMT: 1085.712 (km) Emissions: CO2 (489,102.40 g), NOx (244.29 g) SW: 3165.42 Customer delay: 42.58 (min) |
| Prob. | Inter-Arrival Times | Only Electric Vehicles | Only Conventional Vehicles |
|---|---|---|---|
| 1 | 0.1 | VMT: 851.395 (km) (8%-) SW: 2197.90 (3%+) Customer delay: 75.55 (min) (7%-) | VMT: 926.51 (km) Emissions: CO2 (417,383.49 g), NOx (208.46 g) SW: 2128.92 Customer delay: 81.69 (min) |
| 2 | 0.3 | VMT: 969.451 (km) SW: 2969.56 Customer delay: 73.48 (min) | VMT: 1057.48 (km) Emissions: CO2 (476,384.17 g), NOx (237.93 g) SW: 2988.698 Customer delay: 66.61 (min) |
| 3 | 0.5 | VMT: 1012.42 (km) SW: 3057.835 Customer delay: 79.69 (min) | VMT: 974.48 (km) Emissions: CO2 (438,993.50 g), NOx (219.26 g) SW: 3079.47 Customer delay: 66.75 (min) |
| 4 | 0.7 | VMT: 982.475 (km) SW: 3100.221 Customer delay: 69.69 (min) | VMT: 1050.996 (km) Emissions: CO2 (473,463.19 g), NOx (236.47 g) SW: 3092.443 Customer delay: 75.37(min) |
| 5 | 0.9 | VMT: 1011.105 (km) SW: 3126.25 Customer delay: 66.73 (min) | VMT: 980.88 (km) Emissions: CO2 (441,876.63 g), NOx (220.70 g) SW: 3138.25 Customer delay: 55.83 (min) |
| 6 | 1.1 | VMT: 1031.66 (km) SW: 3146.20 Customer delay: 59.20 (min) | VMT: (1010.32 km) Emissions: CO2 (455,139.06 g), NOx (227.32 g) SW: 3148.19 Customer delay: 57.09 (min) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sayarshad, H.R.; Mahmoodian, V.; Bojović, N. Dynamic Inventory Routing and Pricing Problem with a Mixed Fleet of Electric and Conventional Urban Freight Vehicles. Sustainability 2021, 13, 6703. https://doi.org/10.3390/su13126703
Sayarshad HR, Mahmoodian V, Bojović N. Dynamic Inventory Routing and Pricing Problem with a Mixed Fleet of Electric and Conventional Urban Freight Vehicles. Sustainability. 2021; 13(12):6703. https://doi.org/10.3390/su13126703
Chicago/Turabian StyleSayarshad, Hamid R., Vahid Mahmoodian, and Nebojša Bojović. 2021. "Dynamic Inventory Routing and Pricing Problem with a Mixed Fleet of Electric and Conventional Urban Freight Vehicles" Sustainability 13, no. 12: 6703. https://doi.org/10.3390/su13126703