1. Introduction
In recent years climate change and the environment have become topics of great interest for different sectors. One of the main reasons is related to recent natural disasters, which are related to the above issues [
1]. It is urgent to make decisions to mitigate these unwanted events. Any action is important; however, to stop the deterioration of the environment, it is necessary for governments to become aware, and take forceful actions to approach this issue [
2]. The use of renewable sources plays a fundamental role in the new global energy model [
3].
Despite the benefits of renewable energy sources, the dependence on the intrinsic environmental conditions related to renewable production technologies does not guarantee a net zero power balance at any time. In this sense, the hybridization of renewable energy sources and the use of energy storage systems are feasible solutions [
4,
5]. There are many energy storage solutions, from traditional examples such as water pumping [
6] to the most modern including hydrogen and new battery approaches [
7]. However, all the different alternatives have limitations, depending the final use [
8]. Battery banks are usually designed to absorb the transients in the power balance, so they can be considered a short-term storage system [
9]. As a complement, the use of hydrogen as an energy vector is a promising solution as long-term storage system, and it is being used more frequently [
10,
11].
Research on hydrogen-based systems is still very active due to its complexity and its great potential [
12]. The combination of fuel cells, electrolyzers, and hydrogen storage systems have proven to be attractive alternatives as reserve systems and surplus storage in renewable facilities, where production depends on the availability of energy [
13]. Fuel cells are built from individual cells, together with gas conditioning, cooling and fuel injection, comprise the balance of plant (BoP), which is governed by a control system [
14,
15]. The energy production of a fuel cell is only limited by the amount of hydrogen available, which eliminates the typical restrictions of solar or wind plants, but this, in turn, can be produced in electrolyzers from excess energy. This production–storage–usage cycle, especially interesting if the energy comes from renewable sources, provides the facilities where they are installed with great autonomy and independence from the grid, which enables the optimization of its use and reduction of costs [
10]. Specifically, proton exchange fuel cells (PEFCs), are some of the best alternatives for stationary and portable applications [
16]. PEFCs have higher energy density with lower volume and weight than other types of fuel cells, and they are commercially available at a larger power range [
13]; from a few kW useful in mobile applications [
17], to thousands of kW in microgrid and stationary applications [
18,
19,
20,
21,
22].
The production of clean energy, with zero CO
emissions, and the microgrid concept are closely related. A microgrid is responsible for managing energy flows from renewable production to and from storage systems and consumers [
23,
24].
The objectives of a microgrid must be to guarantee the power demand at the lowest cost possible, so they must not only prioritize the consumption of renewable energy, but also guarantee the proper operation of the components to increase their durability. For this, the operation of each of the systems that comprise it must be properly known, as well as the restrictions to be used. Therefore, obtaining an accurate model of the components of the microgrid is a fundamental task prior to the design of an optimal energy management system (EMS) [
10]. It is also necessary due to the added complexity caused by multiple power sources of different nature. The same could be applied to the consumption units, which include even more factors that need to be taken into account [
25].
According to the scientific literature, most previous works present the microgrid model as a compendium of individual models associated to the elements that integrate the whole microgrid. As consequence, this restricts the quality of the whole microgrid model by not considering the cross interactions between elements. Depending on the type of the model used, the contributions can be grouped in two main categories: complex mathematical models and Linear Time Invariant (LTI) models oriented towards EMS design and application.
In the first category, the works present complex models of the subsystems that require measurement of physical parameters, but these are often not measurable involve expensive techniques in their measurement. Example solutions are presented in [
26,
27,
28,
29,
30] for fuel cell and electrolyzer models, respectively. All these solutions are based on the calculation of the polarization curve of both subsystems as a function of voltage losses due to parameters such as partial pressures, concentration of reagents, temperature, etc. The non-linear models are aimed at the simulation and in-depth studies of the subsystems, which are too complex for their application in the definition of EMS.
On the other hand, models included in the second category present solutions aimed at the implementation of EMS, mostly based on its representation in the state-space form. These solutions correspond to LTI or Mixed Logical Dynamical (MLD) models, which present simplified solutions with respect to the first category [
31,
32,
33]. These contributions are based on simplifications of the model and linearization around a single working point, represented as direct cause–effect relationships between power setpoint and battery and hydrogen subsystem variables, mainly battery State-of-Charge (SOC) and hydrogen level. This leads to a reduction in the quality of the model and therefore the loss of information by the controller to implement the optimal management of the system.
With the aim of increasing performance with respect to the solutions presented in the scientific literature, there are some different methods for the systems’ modelling purpose, however, obviously the performance could be very different, depending on the implemented method for each case. Some of the most commonly used techniques involve Multiple Regression Analyses [
34]. Nevertheless, these types of methods or similar ones with small changes present some limitations [
35]. One of the reasons for the bad performance is the non-linearities intrinsic to the system. Many alternatives for accomplishing the modelling process are based on intelligent techniques [
36]. Of course the nonlinearity problems are solved in many cases by using these kinds of techniques [
37]. Despite this, the problem could persist, depending on the nature of the nonlinearities. When this occurs, one of the possible solutions, that gives very satisfactory results, is the breakdown of the problem into areas with similar and/or linear behaviour [
38,
39].
Taking into account the above explanation, this paper deals with the prediction of the variables in the hydrogen subsystem inside a renewable microgrid based on the EMS concept and development. Attending to the implementation of EMS, there are four important variables to predict: the power from/to the hydrogen subsystem, the degradation of the electrolyzer and the fuel cell, and the hydrogen level in the storage tank. This research uses one hybrid intelligent model to predict each mentioned variable. The model proposed by authors includes all electrical and physical variables of the microgrid, which enables the identification of the interrelationship between the different variables of the microgrid on the main parameters of the hydrogen-based system, i.e., operating power, hydrogen tank level and degradation of fuel cell and electrolyzer. The modelling methodology employed allows the entire operating range of the system to be modelled, which increases the quality of the model with respect to linearized solutions around a single working point.
Table 1 summarizes the main characteristics of the scientific literature. In order to highlight the novelty of this work, the last row presents the main contributions of the authors’ proposals.
Research gap and contribution of the paper:
Previous scientific works present a microgrid model as a compendium for individual models of each subsystem that integrated the microgrid. This restricts the quality of the whole microgrid model by not considering the cross interactions between elements.
These contributions are based on simplifications of the model and linearization around a single working point based on physical parameters that are not easily measurable.
Based on above:
The model proposed by authors includes all electrical and physical variables of the whole microgrid, which allows identifying the interrelationship between the different variables.
All the variables involved in the model are easily measurable at a low cost.
The developed model allows the entire operating range of the system to be modelled.
2. Materials and Methods
In this section, firstly, the installation under study is presented. Then, the model approach used is explained, including the data processing, and the algorithms.
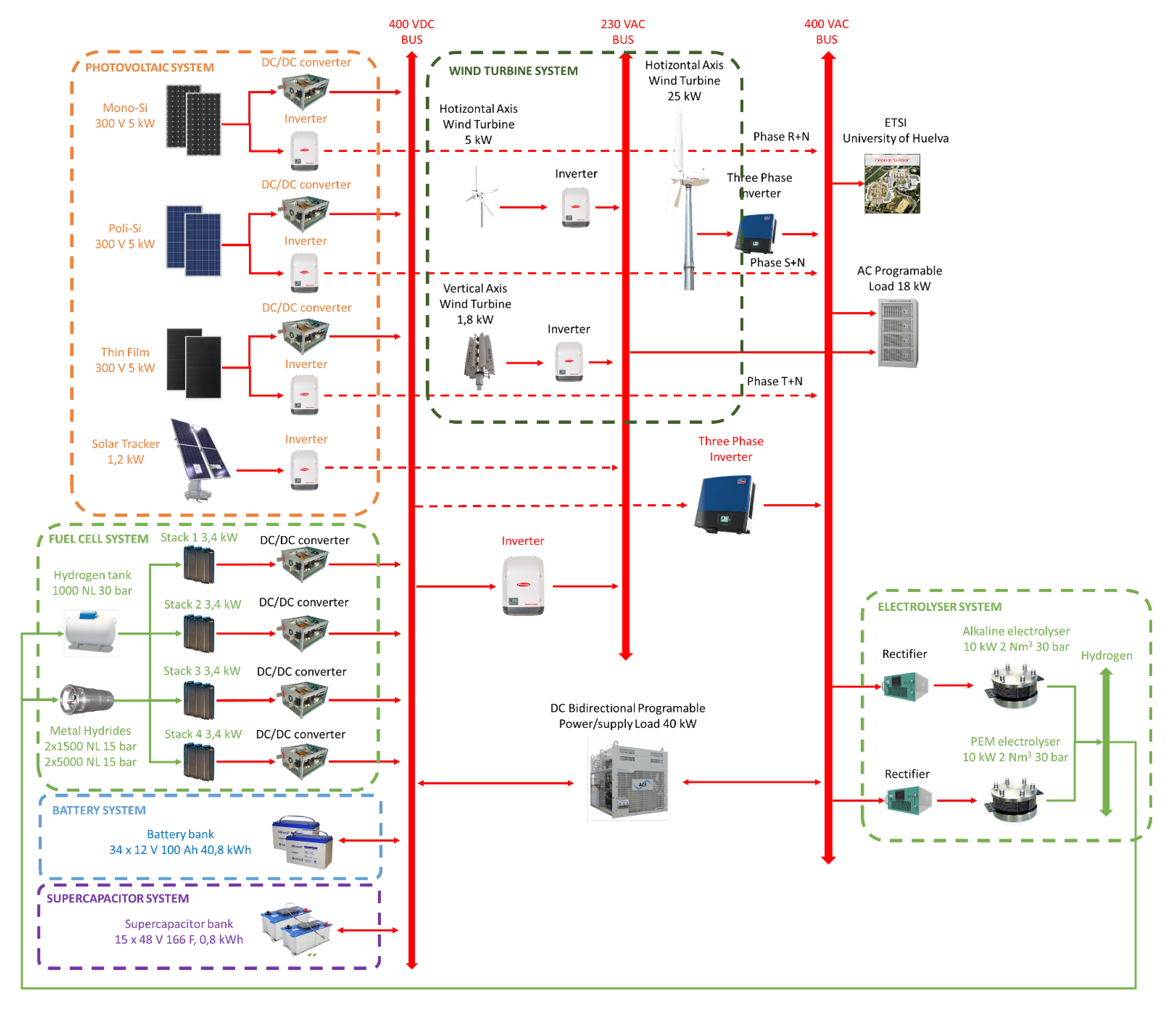
The microgrid used in this work is located in the southwest region of Spain, at the facilities of the “Control and Robotics (TEP-192)” research group in the “La Rábida” Campus of the University of Huelva. The microgrid combines several types of renewable energy sources. In the first instance, there is a
kW photovoltaic plant, consisting of three 5 kW arrays of different technologies, monocrystalline, polycrystalline and thin film and a two-axis solar tracker of
kW (photovoltaic system). The wind production is defined by the installation of three wind turbines, two with horizontal axis and one with a vertical axis, which determine an installed power of
kW (Wind turbine system). It also includes a hybrid energy storage system (supercapacitor, batteries and hydrogen) scaled according to the power of the network and based on the expected response time (energy storage system). The complete scheme of the microgrid with all the systems and their interconnection is shown in
Figure 1 [
40]. The dataset used by authors to obtain the hybrid model corresponds to experimental tests carried out in the real microgrid presented in [
41].
The architecture of the microgrid is characterized by the use of a mixed topology, which uses DC and AC buses to ensure the interconnection between equipment and the main electrical grid [
42]. All of the generation and consumption subsystems are connected to the internal DC bus, supported by the supercapacitor and battery bank, allowing a two-way energy flow between the main electrical grid of the campus and the microgrid. The facility also has programmable power sources and loads, and three energy storage systems: a supercapacitor and battery bank, and a hydrogen loop made up of an electrolyzer (hydrogen production), fuel cell stacks (hydrogen consumption), as well as hydrogen storage in the form of pressure gas or metal hydride compound. The interconnection between each of the microgrid subsystems and the different power buses is carried out using commercial and customized power electronics devices specially designed for the application [
23].
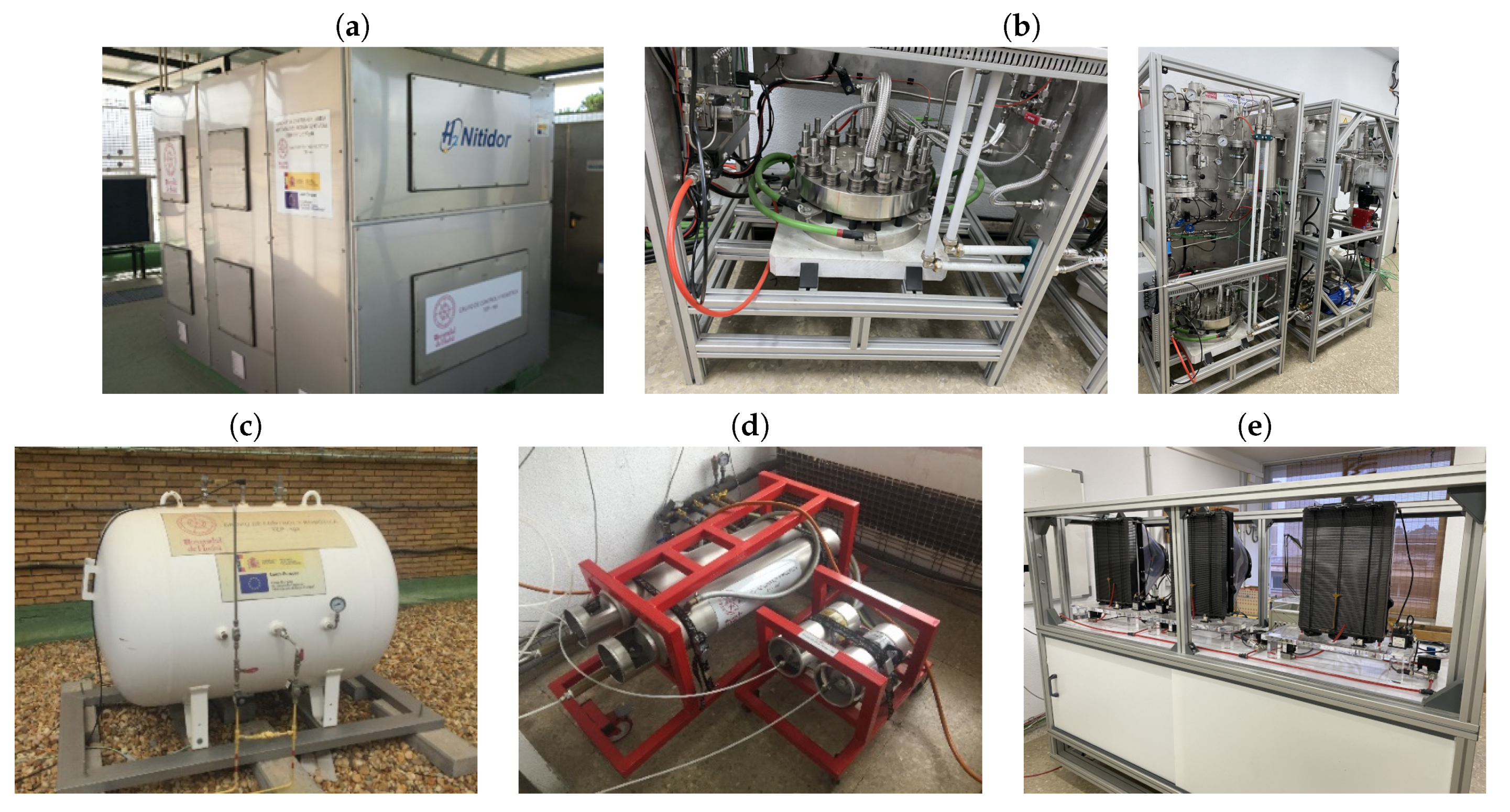
The microgrid used in this work has two electrolyzers of different technologies, alkaline and polymer electrolyte membrane (PEM), both with similar production capacities and output pressures, 2 Nm
/h at 30 bar (
Figure 2a,b respectively). The electrolyzers incorporate all the necessary components for its operation, according to the manufacturer’s conditions and the established power setpoint. The hydrogen generated can be stored in the form of pressurized gas, in a hydrogen storage tank of 1 Nm
(
Figure 2c); or as a solid compound in the form of metal hydrides in two bottles of
Nm
and two bottles of 5 Nm
(
Figure 2d). To carry out the inverse conversion, to generate electricity from the stored hydrogen, the microgrid includes a modular fuel cell system comprised of four PEFC stacks of
kW (
Figure 2e). The correct operation of the fuel cells, as well as the regulation of the working point, are carried out by means of control electronics and power electronics converters designed by the authors.
Based on the above description, the main parameters of the subsystems that make up the microgrid are presented in
Table 2.
2.1. Model Approach
Figure 3a shows the schema of the microgrid power balance and
Figure 3b the model approach in this proposal. The model uses all the variables available in the microgrid, described in the section Acronyms, Notation and Symbols, to predict the four signals in the hydrogen subsystem.
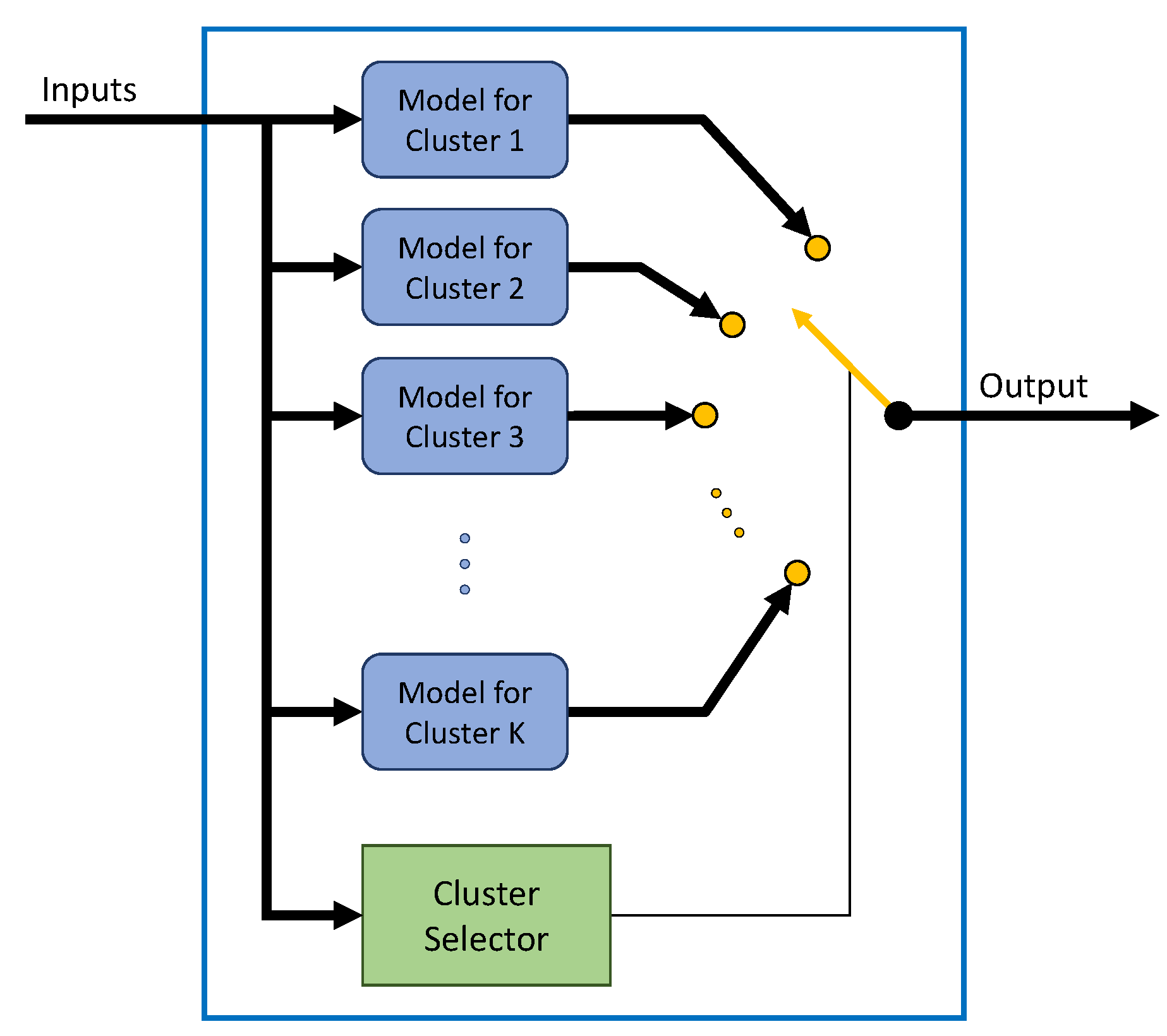
Hybrid intelligent models have been used to divide the whole dataset in different clusters.
Figure 4 shows the internal schema of this type of model. In this research, the inputs of the model were the value of the different variables at a specific instant (k), and the model predicted the values of the output in the next instant (k+1). The variables were represented as follows: battery voltage (V_Bat), battery state of charge (SOC_Bat), hydrogen level (HL_H2), battery power (P_Bat), hydrogen subsystem power (P_H2), power exchanged with the electrical grid (P_Grid), power from renewable origin (P_Ren), power demanded by the load (P_Load), battery degradation (D_Bat), electrolyzer degradation (D_Eles), and fuel cell degradation (D_FC). Note that the model was geared towards EMS implementation, not local controllers.
In this research four models were created, each one predicted one output. The four were hybrid models, thus the whole dataset was divided to calculate the output in local models. Each local model was trained with only a fraction of the dataset. The procedure to create the hybrid model was carried out in four steps:
Clustering phase. Firstly, the dataset was divided into clusters; but as the optimal separation is usually not known, several hybrid topologies were created, dividing the dataset several times (creating two clusters, three clusters ...).
Regression phase. Several regression models were created for each cluster created in the previous phase. These models are known as local models, and there were as many as the number of regression techniques (and a different configuration for each algorithm).
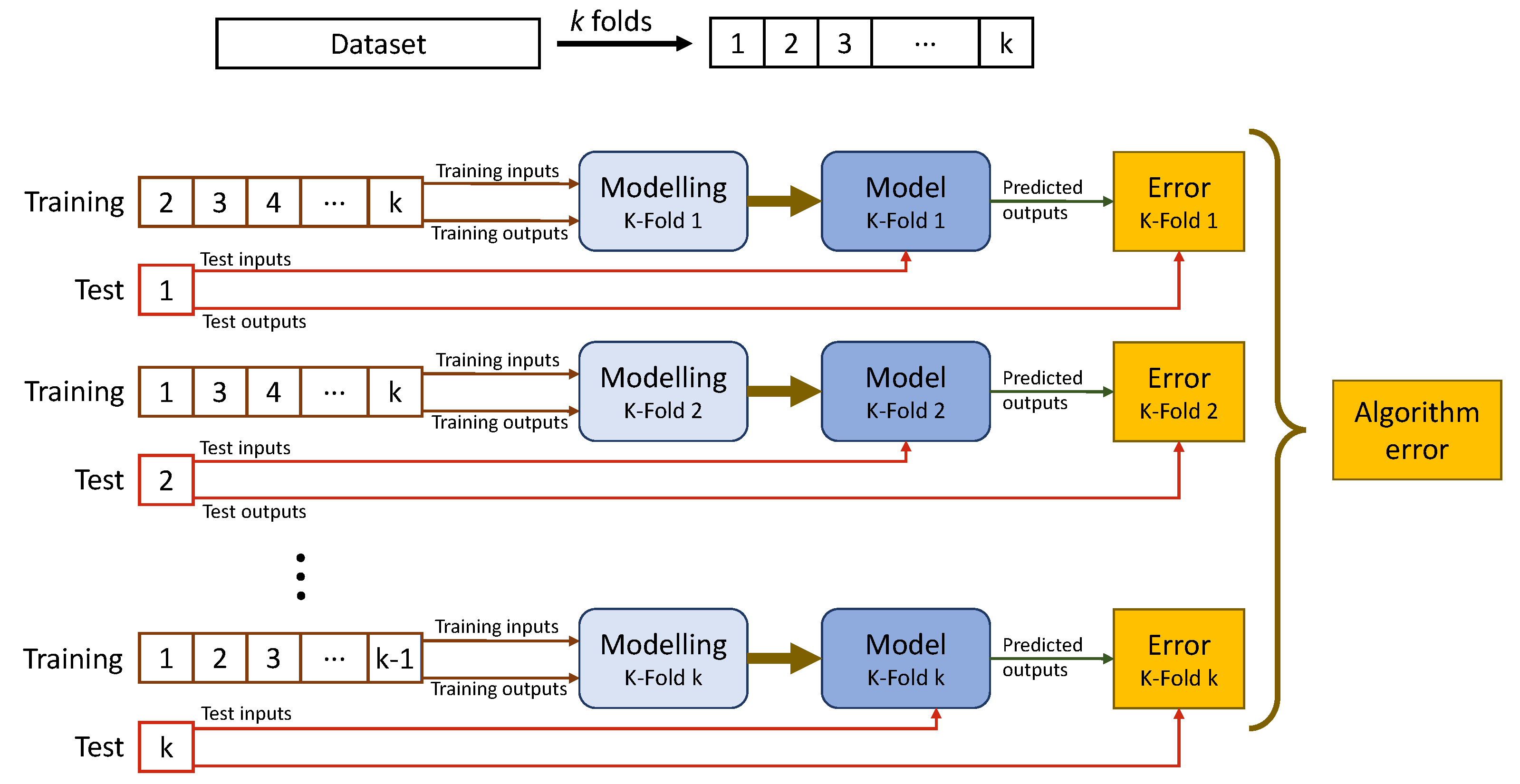
Best local model selection. To select the best local model, it is necessary to compare the predicted error in the different models. In this research, the mean squared error (MSE) calculated with K-fold cross validation was selected.. This validation procedure is represented in
Figure 5, and the value of error calculated was more realistic than with hold out validation.
Best hybrid topology selection. Once the best local models were chosen, each hybrid topology (with two clusters, three clusters ...) was tested to calculate the predicted error of the whole model (not only the local models).
2.2. Data Processing
The dataset used in this research was extracted from several experimental tests made in the microgrid described above. First of all, only the samples with a working hydrogen subsystem were considered. Then, 5% of the data were randomly isolated to test the final model. The rest of the data was used to train the models and to choose the best hybrid topology.
The training data were normalized to be fitted in the 0-1 range. Each variable was normalized independently. Several clusters were created with the normalized data and, before training the local models, another 5% of the data from each cluster were separated from the training process to validate the performance of the different hybrid topologies.
2.3. K-Means Algorithm
K-Means is one of the most known clustering algorithms. In the present paper it was used to divide the dataset in clusters in order to create the local models. The algorithm assigned each sample to the cluster whose centroid was closest. The Euclidean distance is the most typical one [
37,
43,
44]. The algorithm only needs to know how many clusters it needs to create (the parameter
K defined by the user), and the dataset.
After the final centroids were defined, the algorithm took a very short time to assign new samples to its clusters. The training phase to achieve the final centroids involved the following procedure:
The initial centroids were chosen randomly in the dataset.
Each sample was assigned to its cluster (defined by the centroid) depending on how far the centroids were from the sample.
Once each sample was assigned to a cluster, the center of each sample was defined as the new centroid.
The procedure had to be repeated (the last two steps) until the centroids were the same twice. It was necessary to store the centroids to use the K-Means algorithm with new samples.
2.4. Artificial Neural Networks
This research used artificial neural networks (ANNs) to create the regression models. The ANN can be used to perform regression or classification models. This algorithm is inspired by the biological neuron model, and uses this basic component to create the model. The neuron can use several inputs, and each one has an internal factor to adapt the reaction of the neuron to each input.
The neuron has an activation function that uses the sum of all the pondered inputs (and the bias signal), to calculate the neuron output. The typical activation functions are step, linear, log-sigmoid and tan-sigmoid. The multilayer perceptron is a basic feed-forward ANN structure that organizes the neuron in layers. Each layer has neurons with the same inputs and outputs. The inputs of the model are connected to the input layer, there is one (or more) hidden or internal layers, and the output layer is connected to the output of the model [
45,
46,
47].
The ANNs are commonly used because they have a good performance to generalize data despite not being in the training data.
4. Conclusions and Future Research
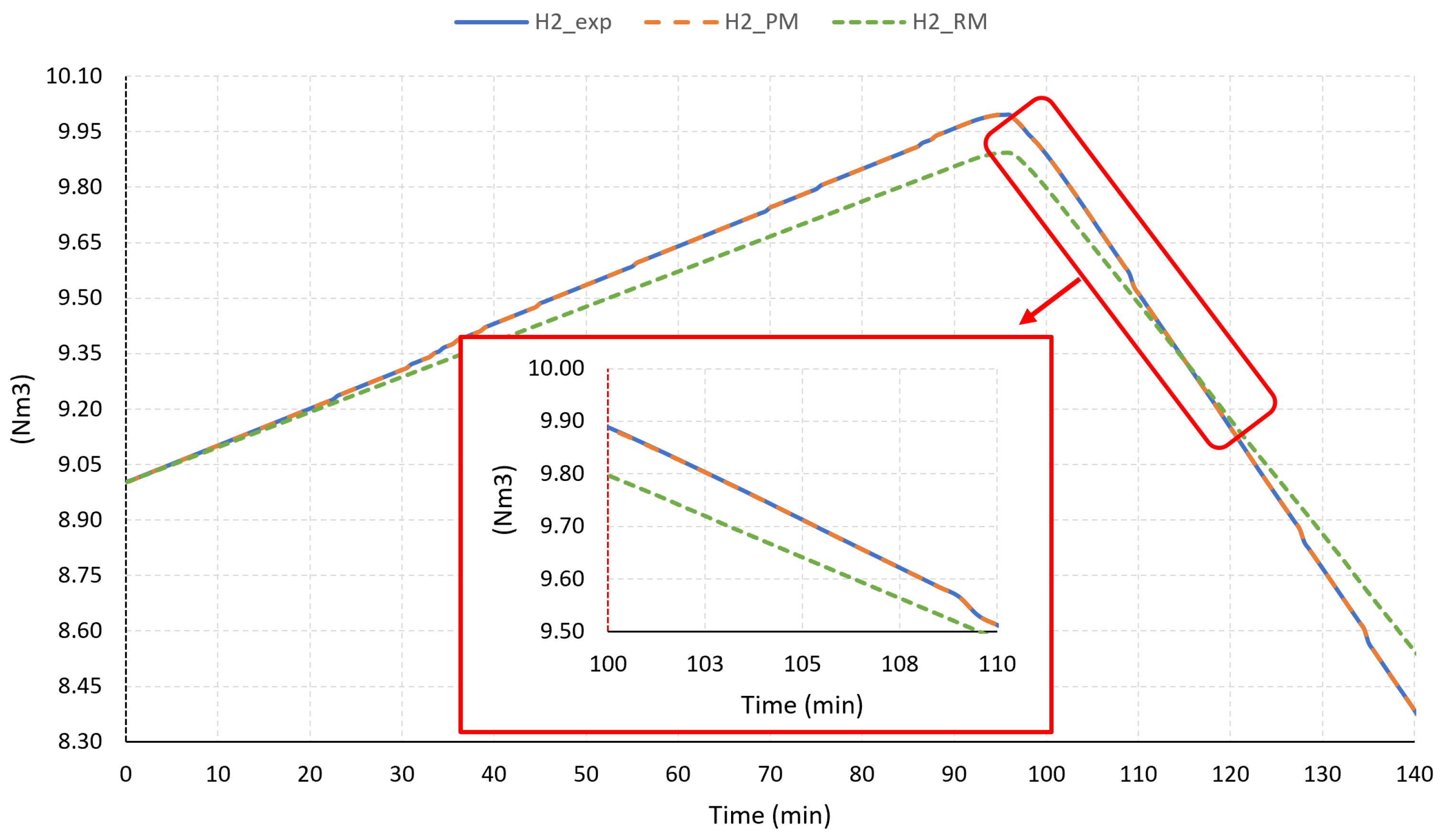
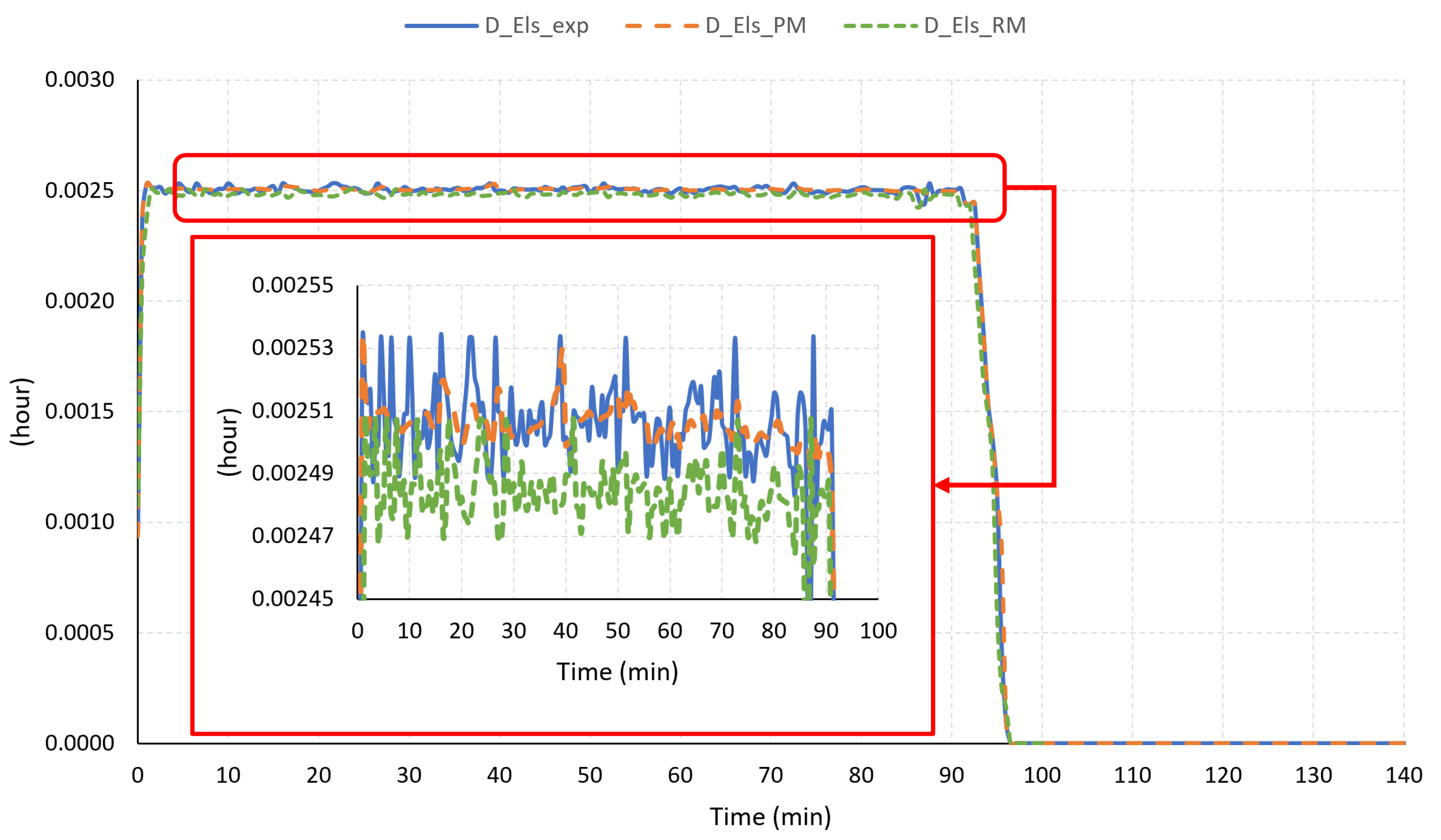
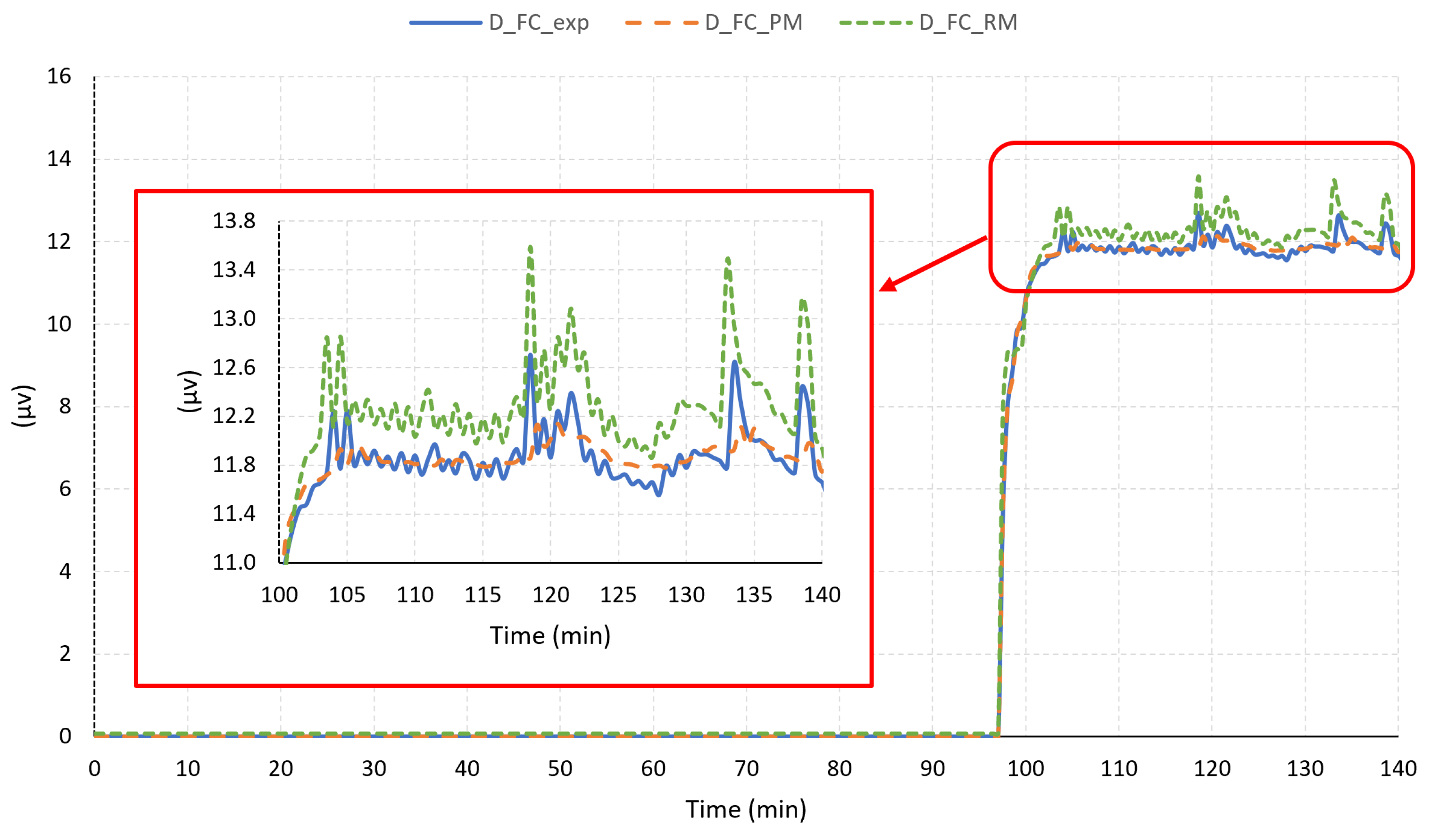
This paper develops a hybrid intelligent model to predict the hydrogen subsystem behaviour considering the remaining electrical and physical variables that intervene in the microgrid performance. This allows identifying the interrelationship between the different variables of the whole microgrid and the parameters of the hydrogen-based subsystem, i.e., operating power, hydrogen tank level and degradation of fuel cell and electrolyzer. Four different models were developed in order to predict the four output variables: the hydrogen subsystem power (consumed by the electrolyzer or supplied by the fuel cell module), the level of stored hydrogen, and the degradation of the electrolyzer and the fuel cell module.
The accuracy of the model has been validated; all the models have been created with a hybrid topology that divides the model into two different local models. The final models were validated with a dataset isolated from the one used for training, and they obtain a maximum MSE of in the prediction of the degradation of the electrolyzer, and a minimum MSE of , obtained in the model that predicts the hydrogen level in the tank.
The models were tested using a different dataset and they obtained an MSE of to predict the hydrogen subsystem power, to predict the level of stored hydrogen, to predict the degradation of the electrolyzer, and to predict the degradation of the fuel cell module. These errors are calculated without normalization values. The results shows that this type of model can be used in these systems. To obtain a general model that could be applied to different specific systems, it was necessary to increase the dataset to train all the types of working points.
Finally, the response of the proposed model was compared to those used as reference models [
48,
49,
50,
51]. For this purpose, all the reference models were simulated using the same input profile, making use of the power setpoint for electrolyzer and fuel cell obtained from the experimental data. As an output, the hydrogen generation/consumption ratios in electrolyzer and fuel cell (references [
48,
49,
50]) and their respective degradation ratios (reference [
51]) have been obtained and used for the validation process.
The created model involves both operation of the hydrogen subsystem, storage and consumption. Previous work [
48] develops a model only for the electrolyzer and achieves an RMSE of
. On the other hand, in studies such as [
49] that work with artificial intelligence techniques or [
50] that choose classical modelling techniques to model the fuel cell behaviour, they obtain an RMSE of
and an MSE of
. The proposal developed by authors models the behaviour of a whole hydrogen subsystem integrated by the electrolyzer, hydrogen storage and fuel cell. Based on obtained results, the authors’ proposal is validated with an RMSE of
and an MSE of
.
As future work, it is possible to mention the extension of this procedure in the other sub systems of the microgrid. Moreover, it would be necessary to increase the dataset to include more working points with different powers and different hydrogen levels in the tank.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}