Methodology for the Optimal Design of a Hybrid Charging Station of Electric and Fuel Cell Vehicles Supplied by Renewable Energies and an Energy Storage System

 ,
,
Abstract
:1. Introduction
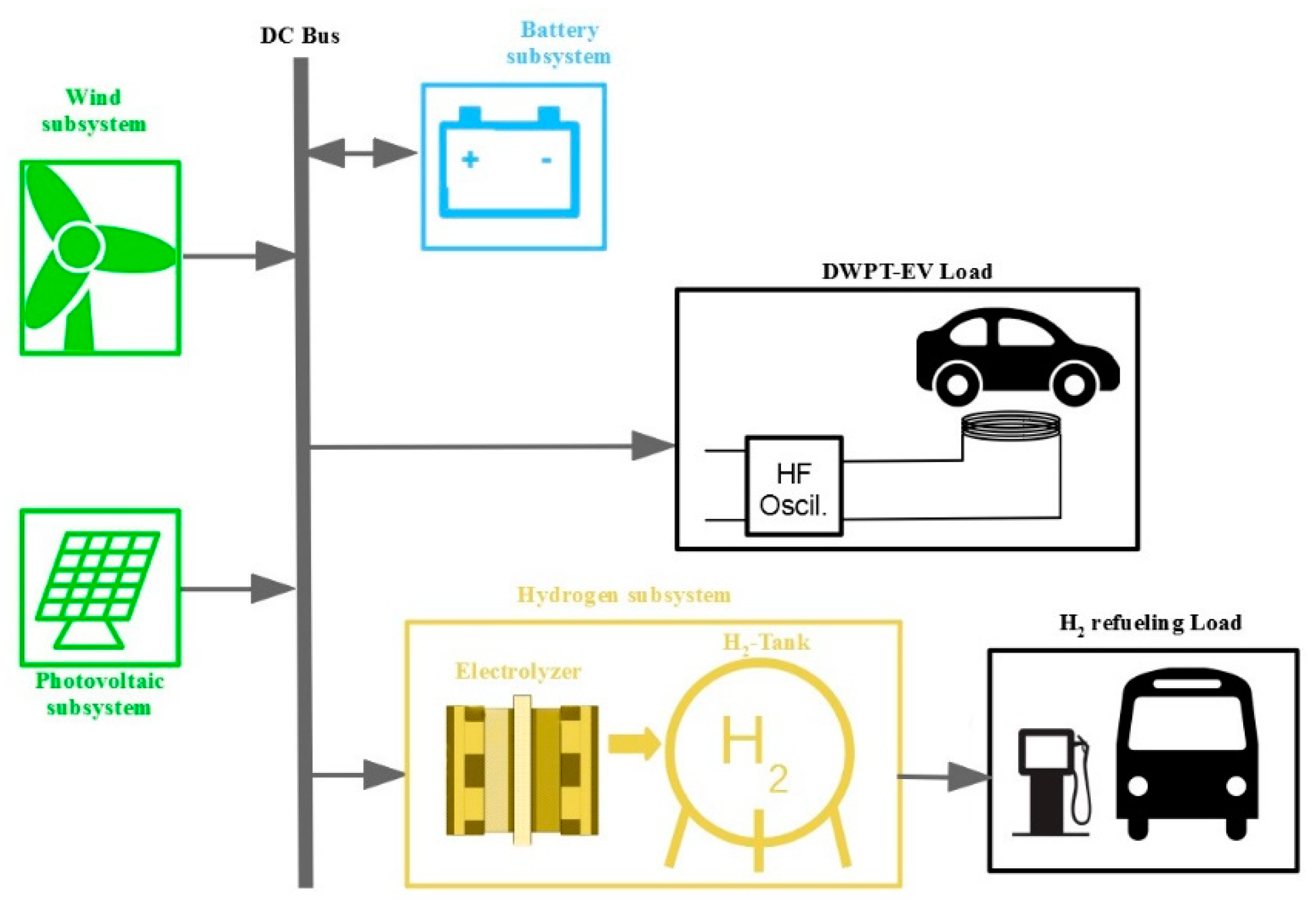
2. Microgrid under Study
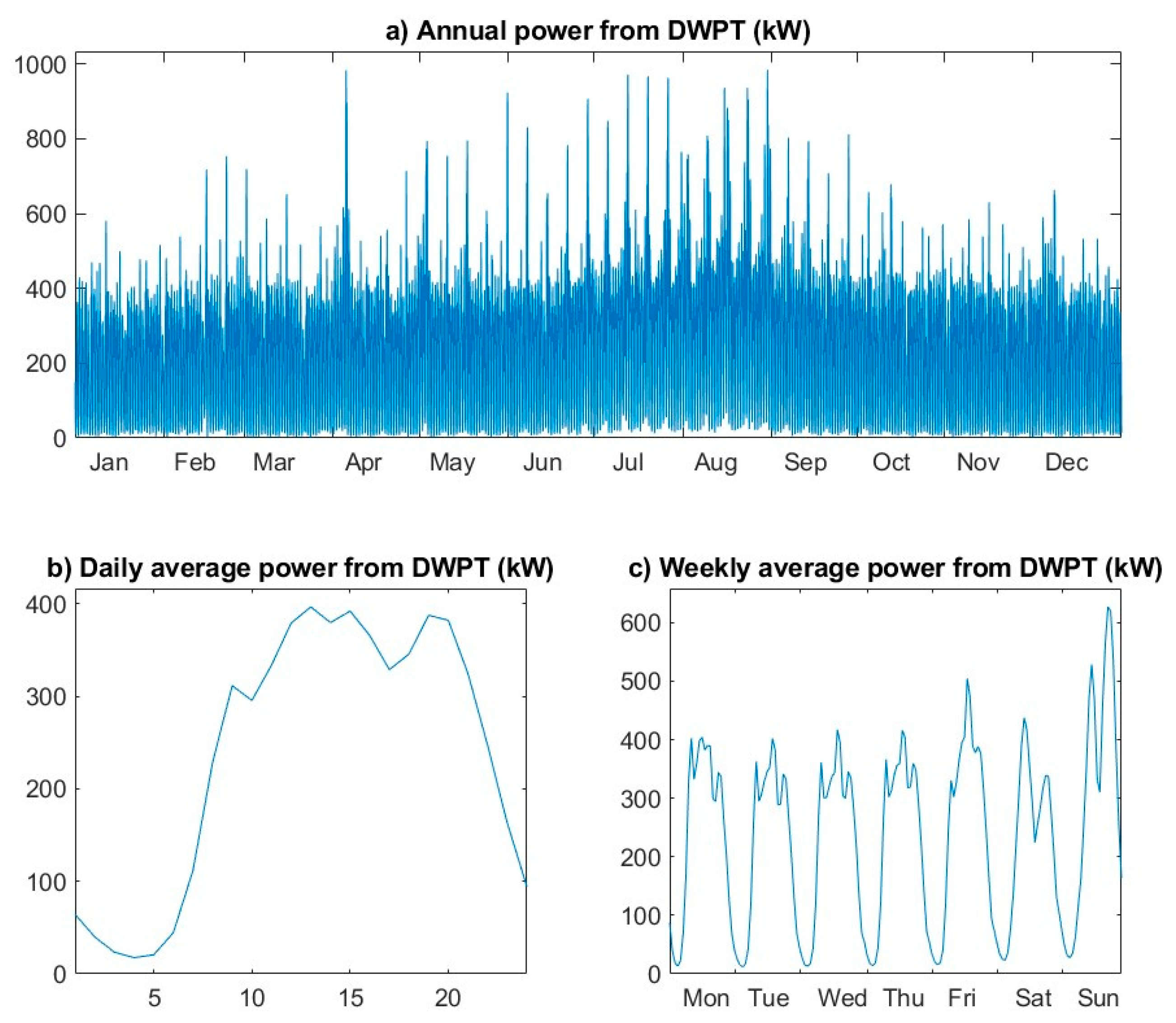
3. Wireless Power Transfer System for the Dynamic Charging of EVs
4. Hydrogen Charging Station for Fuel Cell-Powered Buses
5. Optimal Sizing of the Microgrid
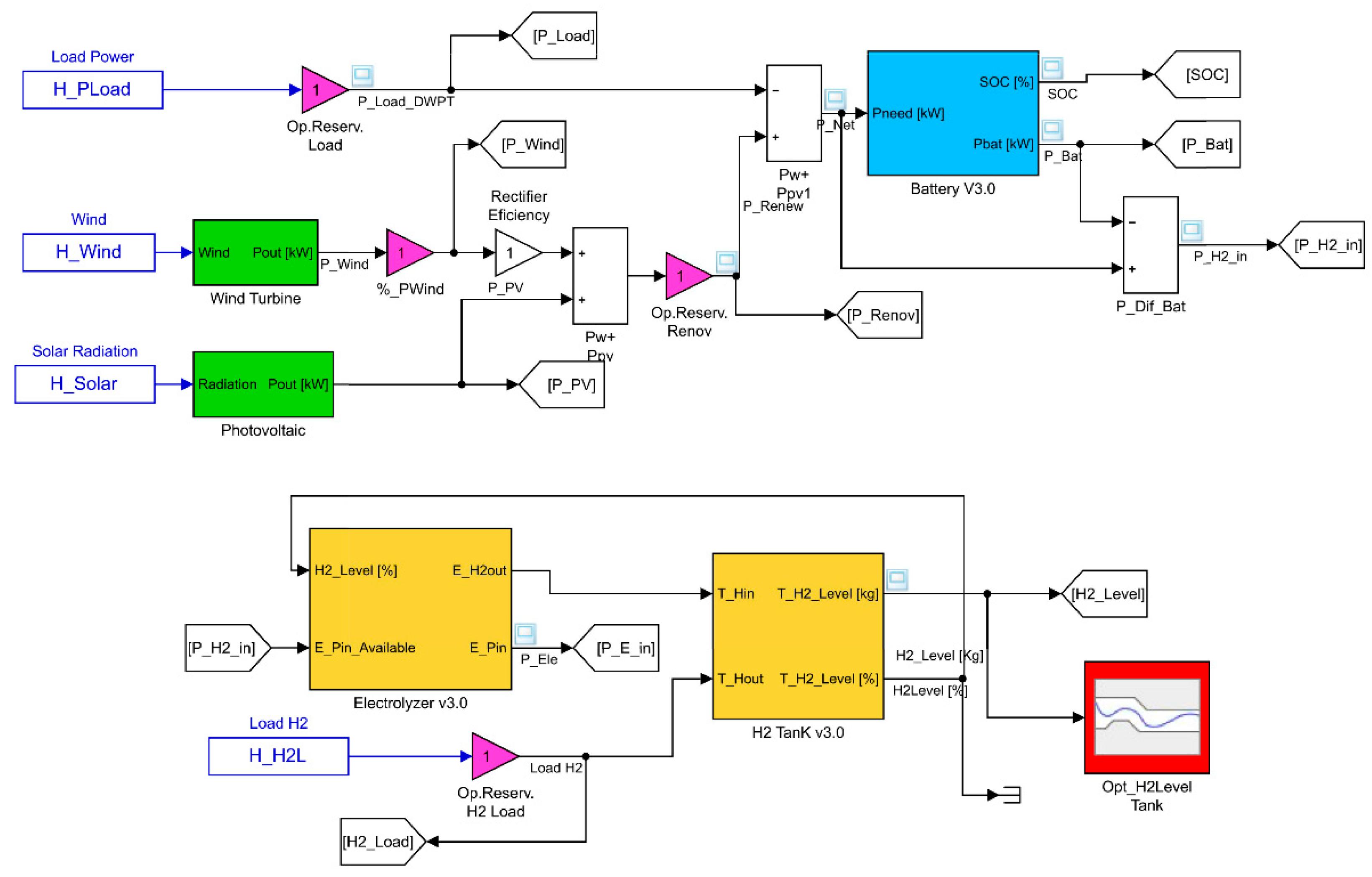
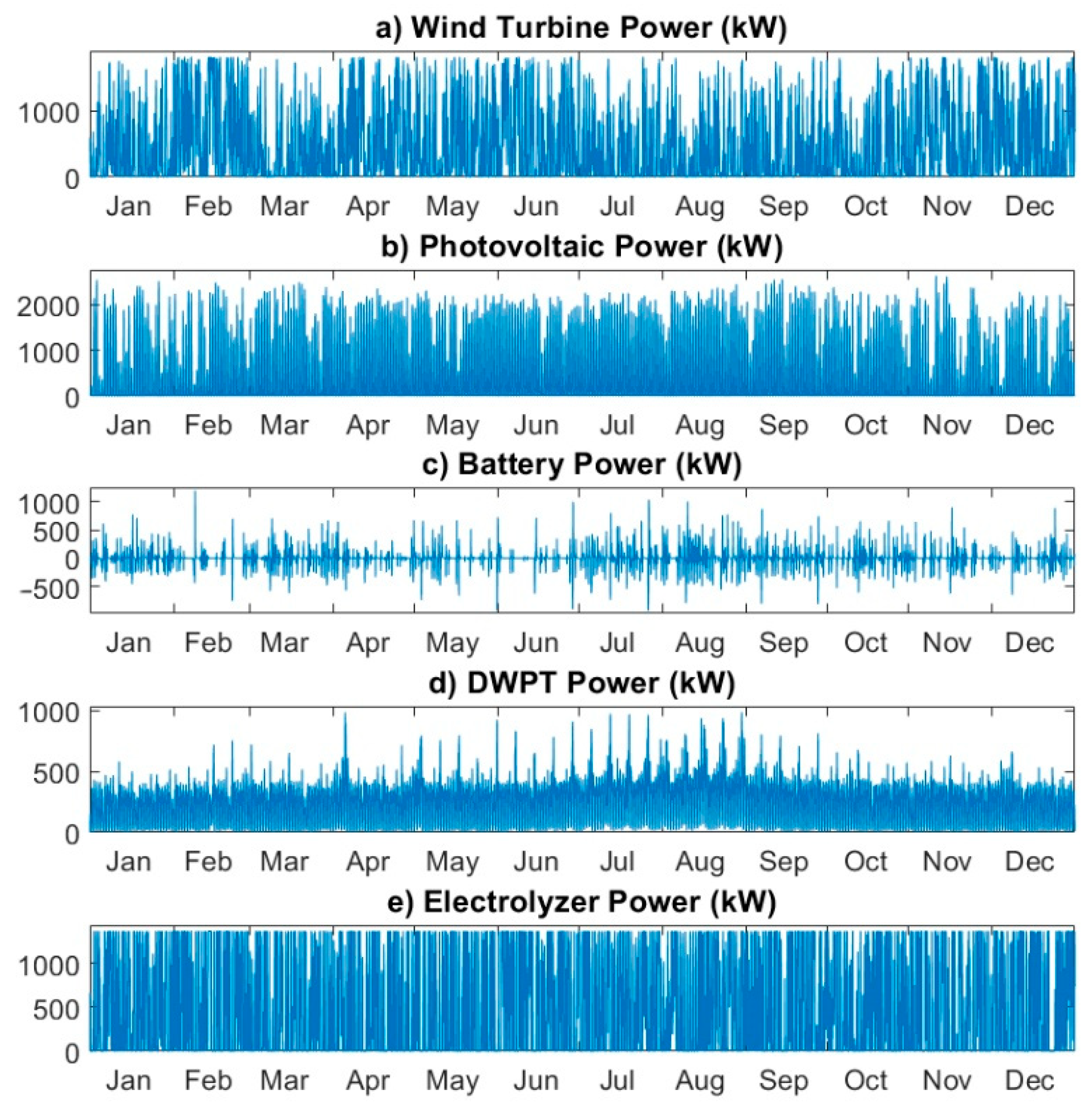
5.1. Simulink Model of the Microgrid
5.1.1. Wind Subsystem
5.1.2. Photovoltaic subsystem
5.1.3. Battery Subsystem
5.1.4. Hydrogen Subsystem
5.2. Sizing Optimization Based on SDO
- (1)
- Model construction and definition of the design variables (DVs). The DVs are the parameters involved in the optimization process; in this case, the sizing parameters of the subsystems. The signals that are subject to restrictions in the Response Optimization analysis must be also defined. In this case, an annual minimum constraint to the hydrogen level in the tank was established. This constraint was carried out through the red block, called “Opt_H2Level Tank” in Figure 3. Different minimum hydrogen levels were analyzed in this work, but in all cases, the minimum levels were integers of the daily hydrogen maximum demand established in 260 hydrogen-kg per day in Section 4.
- (2)
- Definition of the range of variation and the starting value of the DVs to be used in the optimization process. The range of values (maximum and minimum) and the initial values of the DVs must be defined. The detailed procedure followed to define these ranges of values is not indicated here due to the length of the paper, and only the criteria followed to select the limits of those ranges are briefly stated. The maximum number of WTs, as well as the maximum value of the installed PV power, are defined by the average capacity of joint energy production with respect to the average energy requested by the load for the most unfavorable month. The obtained values were 16 units for N_WT_max and 3152 kW for P_PV_max. The maximum number of strings in the subsystem battery was calculated for the day of the year with the greatest energy requested by the load. This energy was considered 70% of the maximum energy of the battery. This led to 176 strings. The maximum number of stackable units of the electrolyzer was chosen considering that its capacity of hydrogen production was equal to the maximum daily demand of hydrogen by the refueling station. The value obtained was 121 units. The maximum value of the last DV and the number of stackable hydrogen tank units was taken as equal to a sufficiently large arbitrary value. For this model, the assigned value was 1000 units.
6. Results and Discussions
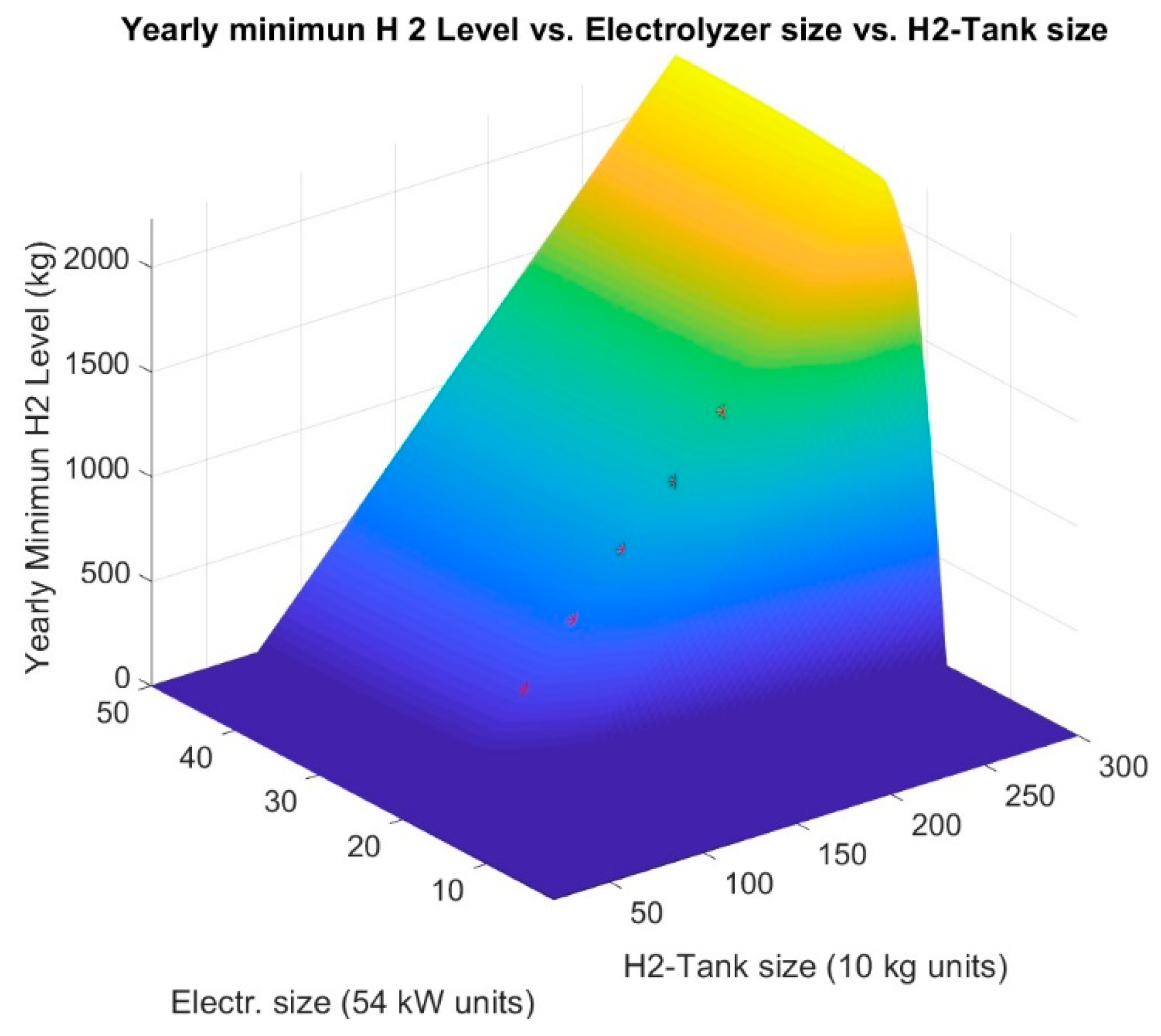
6.1. SDO-Based Sizing Optimization of the Hydrogen Subsystem
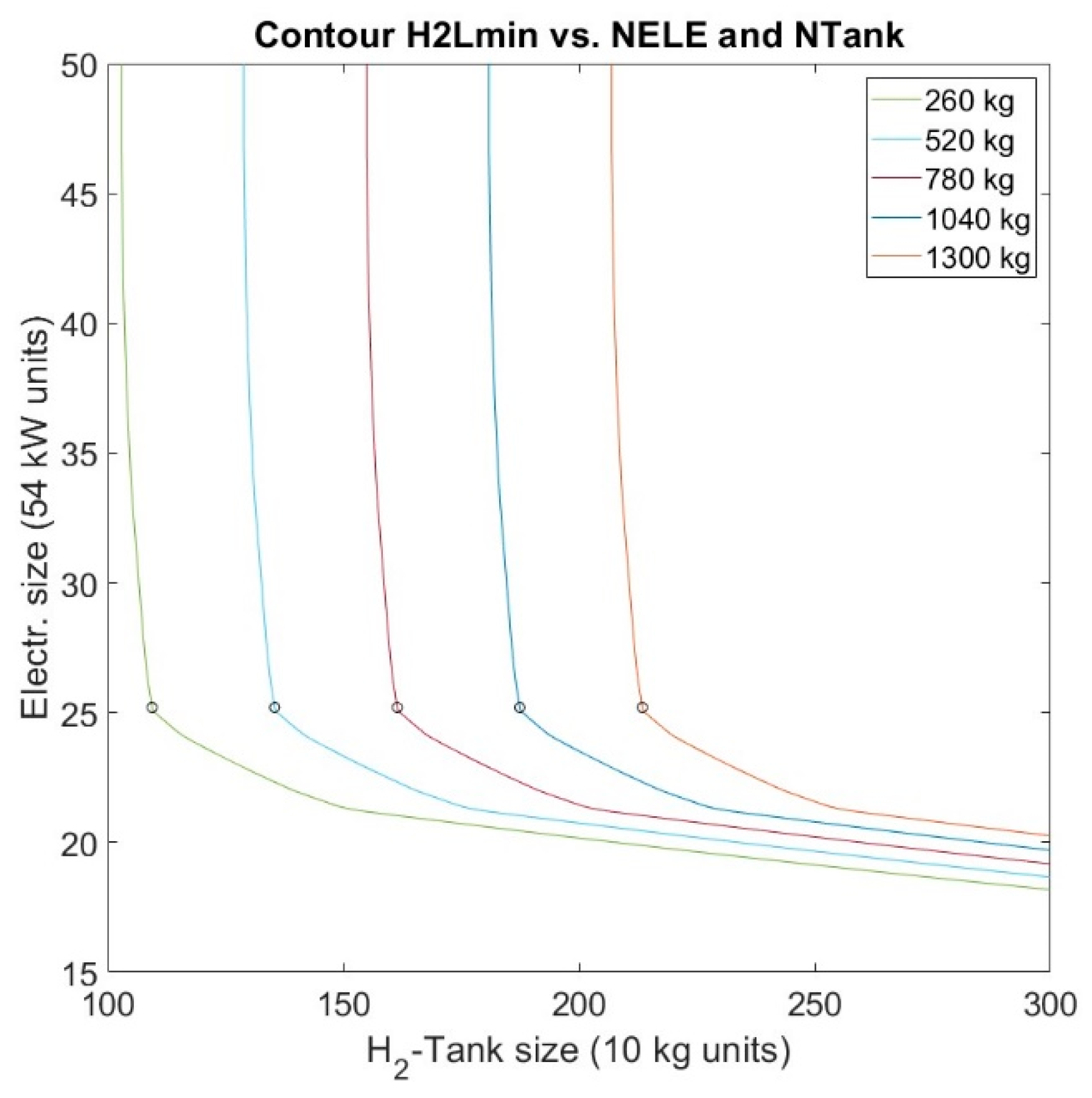
6.1.1. Dependence on the Minimum Level of Hydrogen
6.1.2. Optimal Sizing of the Hydrogen Subsystem
- Minimization of the H2Lmin value: This constraint forces SDO to minimize the H2Lmin value.
- Minimization of NTank and NELE: These constraints force SDO to find a solution that minimizes the values of the hydrogen subsystem parameters.
- The battery SOC was kept above 30%: The battery model has a control over the minimum SOC, but it does not prevent this limit from being reached. The minimization process of the size causes a greater demand of energy to the battery and repeated processes of discharge below the minimum SOC. This constraint was included in order to prevent that situation.
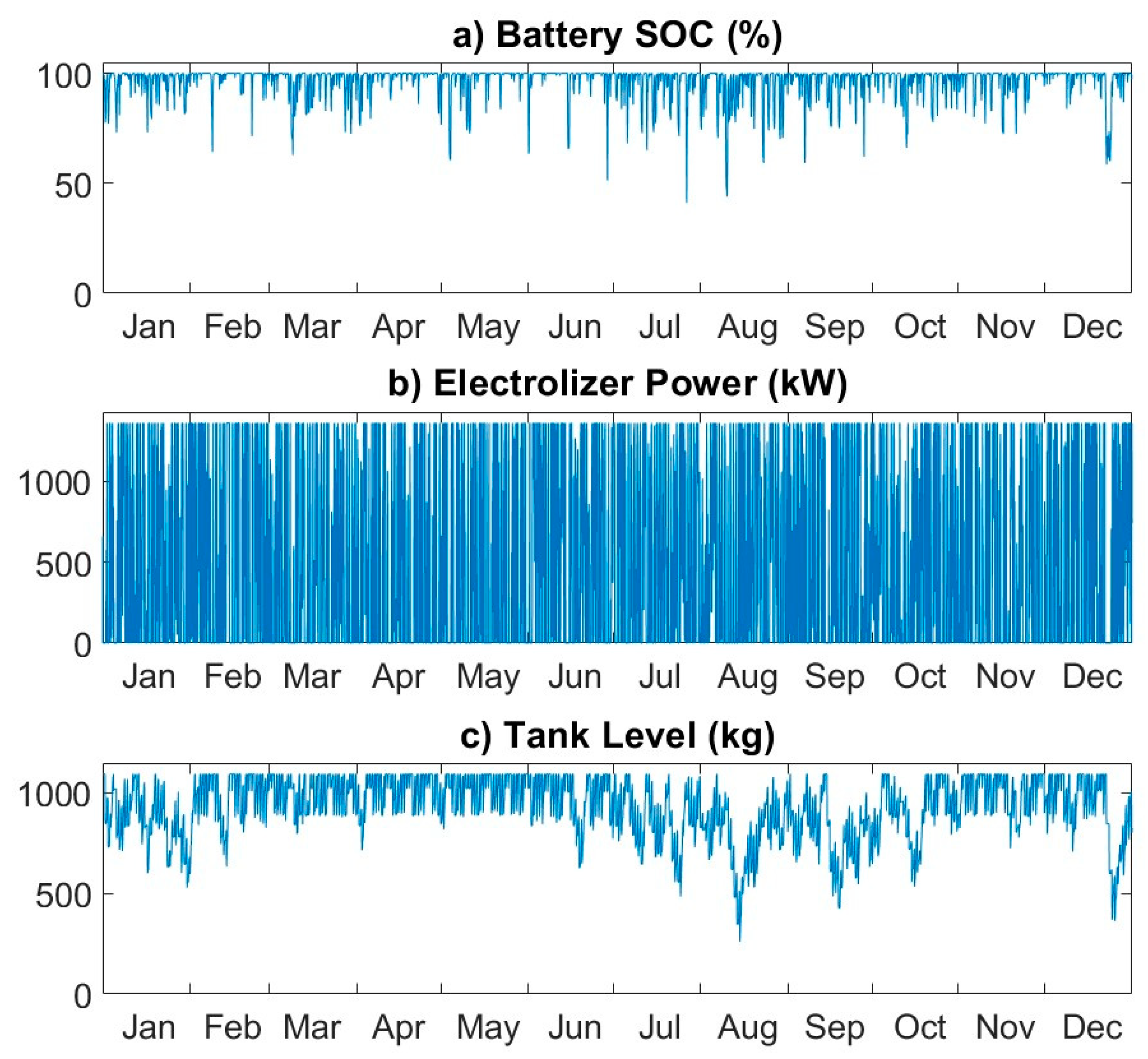
6.1.3. Checking the Results Obtained by SDO
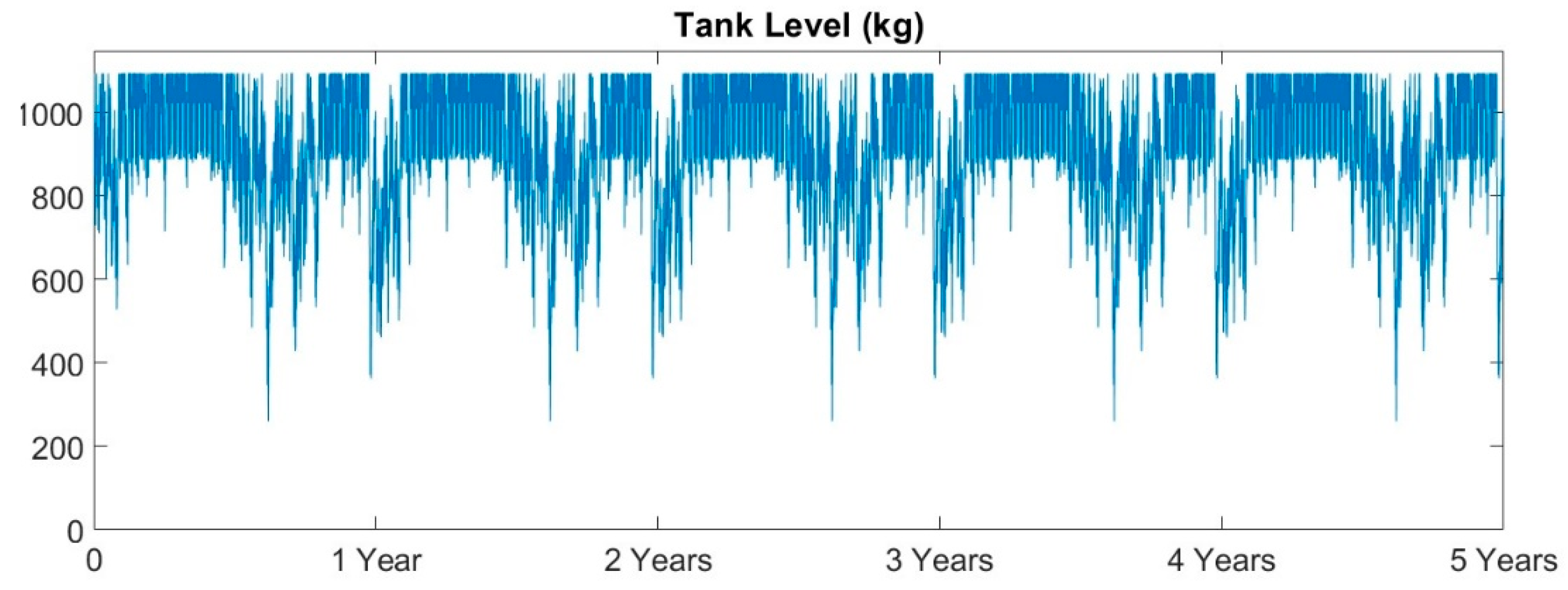
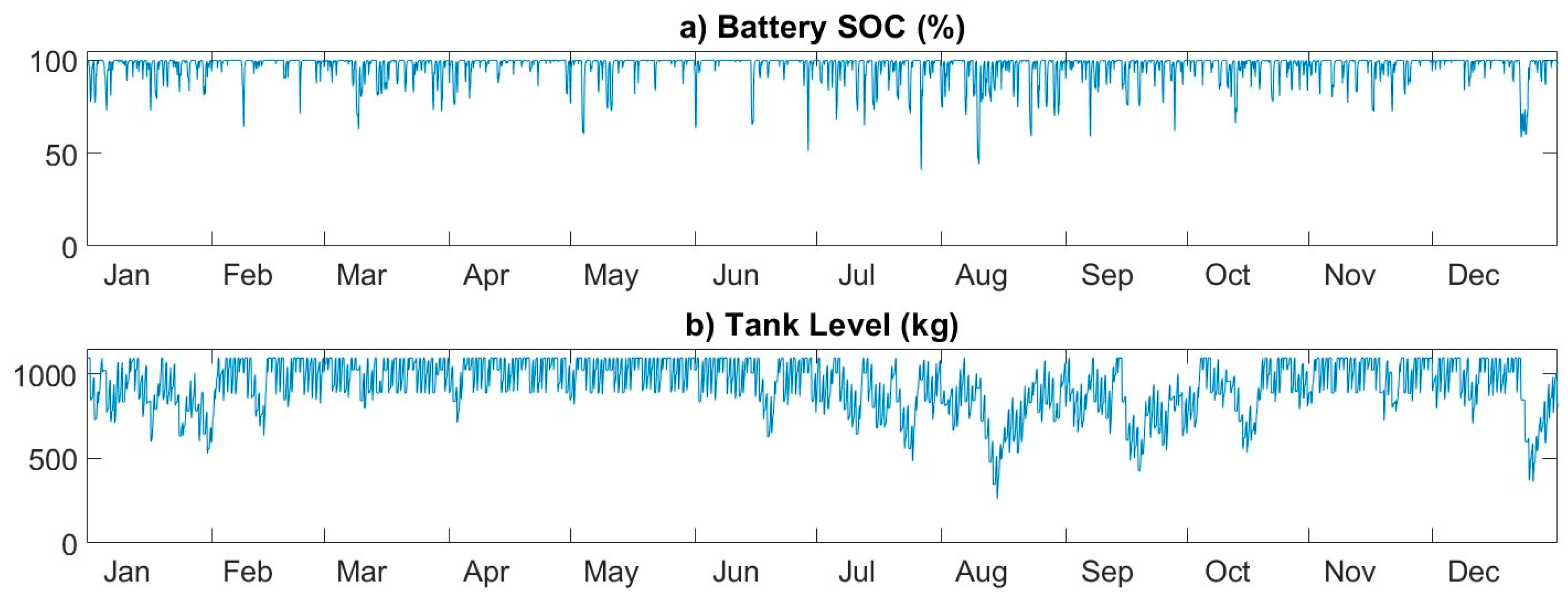
6.1.4. Annual Final Value of the Hydrogen Tank Level
- NELE: 17.6 units of 54 kW.
- NTank: 331.9 units of 10 kg.
- Minimum initial level of the hydrogen tank: 79.5%.
- Final annual level of the hydrogen tank: 80.3%, or 2664 kg.
6.2. SDO-Based Optimal Sizing of the Whole Microgrid
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- European Commission. State of the Art on Alternative Fuels Transport Systems in the European Union; European Commission: Brussel, Belgium, 2015. [Google Scholar]
- Energy-Economics-Environment Modeling Laboratory. Available online: http://www.e3mlab.eu/e3mlab/index.php (accessed on 27 October 2018).
- 2014-PRIMES-TREMOVE: A Transport Sector Model for Long-Term Energy-Economy-Environment Planning for EU. Available online: http://www.e3mlab.eu/e3mlab/index.php?option=com_content&view=article&id=485%3A2014-qprimes-tremove-a-transport-sector-model-for-long-term-energy-economy-environment-planning-for-euq&catid=54%3Apresentations&Itemid=79&lang=en (accessed on 27 October 2018).
- Li, S.; Mi, C.C. Wireless power transfer for electric vehicle applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Vilathgamuwa, D.M.; Sampath, J.P.K. Wireless power transfer (WPT) for electric vehicles (EVs)—Present and future trends. In Plug in Electric Vehicles in Smart Grids; Springer: Singapore, 2015; Volume 91, pp. 33–60. ISBN 978-981-287-301-9. [Google Scholar]
- Ko, Y.D.; Jang, Y.J. The optimal system design of the online electric vehicle utilizing wireless power transmission technology. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1255–1265. [Google Scholar] [CrossRef]
- Jeong, S.; Jang, Y.J.; Kum, D. Economic Analysis of the Dynamic Charging Electric Vehicle. IEEE Trans. Power Electron. 2015, 30, 6368–6377. [Google Scholar] [CrossRef]
- Miller, J.M.; Jones, P.T.; Li, J.M.; Onar, O.C. ORNL experience and challenges facing dynamic wireless power charging of EV’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Transport Research Laboratory (TRL). Feasibility Study: Powering Electric Vehicles on England’s Major Roads; Highways England Company: London, UK, 2015; Volume 244. [Google Scholar]
- García-Vázquez, C.A.; Llorens-Iborra, F.; Fernández-Ramírez, L.M.; Sánchez-Sainz, H.; Jurado, F. Comparative study of dynamic wireless charging of electric vehicles in motorway, highway and urban stretches. Energy 2017, 137, 42–57. [Google Scholar] [CrossRef]
- Fabric-Fabric EU Project. Available online: https://www.fabric-project.eu/ (accessed on 28 October 2018).
- De Silva, R.; Fisk, K. Charging electric vehicles from distributed solar generation. In Proceedings of the 2015 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Brisbane, Australia, 15–18 November 2015; pp. 1–5. [Google Scholar]
- Chandra Mouli, G.R. Charging Electric Vehicles from Solar Energy: Power Converter, Charging Algorithm and System Design. Doctoral Dissertation, Delft University of Technology, Hong Kong, China, 2018. [Google Scholar]
- Correa, G.; Muñoz, P.; Falaguerra, T.; Rodriguez, C.R. Performance comparison of conventional, hybrid, hydrogen and electric urban buses using well to wheel analysis. Energy 2017, 141, 537–549. [Google Scholar] [CrossRef]
- Kendall, K.; Kendall, M.; Liang, B.; Liu, Z. Hydrogen vehicles in China: Replacing the Western Model. Int. J. Hydrog. Energy 2017, 42, 30179–30185. [Google Scholar] [CrossRef]
- Lozanovski, A.; Whitehouse, N.; Ko, N.; Whitehouse, S. Sustainability assessment of fuel cell buses in public transport. Sustainability 2018, 10, 1480. [Google Scholar] [CrossRef]
- Barboza, C. Towards a renewable energy decision making model. Procedia Comput. Sci. 2015, 44, 568–577. [Google Scholar] [CrossRef]
- NewBusFuel. Available online: http://newbusfuel.eu/ (accessed on 28 October 2018).
- Edwards, R.; Hass, H.; Larivé, J.-F.; Lonza, L.; Mass, H.; Rickeard, D.; Larive, J.-F.; Rickeard, D.; Weindorf, W. Well-to-Wheels Analysis of Future Automotive Fuels and Powertrains in the European Context WELL-TO-TANK (WTT) Report; Version 4; U.S. Department of Energy: Washington, DC, USA, 2013.
- Al-falahi, M.D.A.; Jayasinghe, S.D.G.; Enshaei, H. A review on recent size optimization methodologies for standalone solar and wind hybrid renewable energy system. Energy Convers. Manag. 2017, 143, 252–274. [Google Scholar] [CrossRef]
- Amutha, W.M.; Rajini, V. Techno-economic evaluation of various hybrid power systems for rural telecom. Renew. Sustain. Energy Rev. 2015, 43, 553–561. [Google Scholar] [CrossRef]
- Bentouba, S.; Bourouis, M. Feasibility study of a wind–photovoltaic hybrid power generation system for a remote area in the extreme south of Algeria. Appl. Therm. Eng. 2016, 99, 713–719. [Google Scholar] [CrossRef]
- Akram, U.; Khalid, M.; Shafiq, S. An Improved Optimal Sizing Methodology for Future Autonomous Residential Smart Power Systems. IEEE Access 2018, 6, 5986–6000. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Li, P.; Wang, K.; Xue, M.; Wang, C. Optimal sizing, operating strategy and operational experience of a stand-alone microgrid on Dongfushan Island. Appl. Energy 2014, 113, 1656–1666. [Google Scholar] [CrossRef]
- Bartolucci, L.; Cordiner, S.; Mulone, V.; Rocco, V.; Rossi, J.L. Hybrid renewable energy systems for renewable integration in microgrids: Influence of sizing on performance. Energy 2018, 152, 744–758. [Google Scholar] [CrossRef]
- Nogueira, C.E.C.; Vidotto, M.L.; Niedzialkoski, R.K.; De Souza, S.N.M.; Chaves, L.I.; Edwiges, T.; Dos Santos, D.B.; Werncke, I. Sizing and simulation of a photovoltaic-wind energy system using batteries, applied for a small rural property located in the south of Brazil. Renew. Sustain. Energy Rev. 2014, 29, 151–157. [Google Scholar] [CrossRef]
- Ferrer-Martí, L.; Domenech, B.; García-Villoria, A.; Pastor, R. A MILP model to design hybrid wind-photovoltaic isolated rural electrification projects in developing countries. Eur. J. Oper. Res. 2013, 226, 293–300. [Google Scholar] [CrossRef]
- Kanase-Patil, A.B.; Saini, R.P.; Sharma, M.P. Sizing of integrated renewable energy system based on load profiles and reliability index for the state of Uttarakhand in India. Renew. Energy 2011, 36, 2809–2821. [Google Scholar] [CrossRef]
- Rajanna, S.; Saini, R.P. Development of optimal integrated renewable energy model with battery storage for a remote Indian area. Energy 2016, 111, 803–817. [Google Scholar] [CrossRef]
- Fathy, A. A reliable methodology based on mine blast optimization algorithm for optimal sizing of hybrid PV-wind-FC system for remote area in Egypt. Renew. Energy 2016, 95, 367–380. [Google Scholar] [CrossRef]
- Sanchez, V.M.; Chavez-Ramirez, A.U.; Duron-Torres, S.M.; Hernandez, J.; Arriaga, L.G.; Ramirez, J.M. Techno-economical optimization based on swarm intelligence algorithm for a stand-alone wind-photovoltaic-hydrogen power system at south-east region of Mexico. Int. J. Hydrog. Energy 2014, 39, 16646–16655. [Google Scholar] [CrossRef]
- Shi, B.; Wu, W.; Yan, L. Size optimization of stand-alone PV/wind/diesel hybrid power generation systems. J. Taiwan Inst. Chem. Eng. 2017, 73, 93–101. [Google Scholar] [CrossRef]
- Singh, S.; Singh, M.; Kaushik, S.C. Feasibility study of an islanded microgrid in rural area consisting of PV, wind, biomass and battery energy storage system. Energy Convers. Manag. 2016, 128, 178–190. [Google Scholar] [CrossRef]
- Ahmadi, S.; Abdi, S. Application of the Hybrid Big Bang-Big Crunch algorithm for optimal sizing of a stand-alone hybrid PV/wind/battery system. Sol. Energy 2016, 134, 366–374. [Google Scholar] [CrossRef]
- Cho, J.H.; Chun, M.G.; Hong, W.P. Structure optimization of stand-alone renewable power systems based on multi object function. Energies 2016, 9, 649. [Google Scholar] [CrossRef]
- Mukhtaruddin, R.N.S.R.; Rahman, H.A.; Hassan, M.Y.; Jamian, J.J. Optimal hybrid renewable energy design in autonomous system using Iterative-Pareto-Fuzzy technique. Int. J. Electr. Power Energy Syst. 2015, 64, 242–249. [Google Scholar] [CrossRef]
- HOMER (The Hybrid Optimization Model for Electric Renewables). Available online: http://homerenergy.com/ (accessed on 30 September 2019).
- HOGA (Hybrid Optimization by Genetic Algorithms). Available online: https://ihoga.unizar.es/en/ (accessed on 30 September 2019).
- Zahboune, H.; Zouggar, S.; Krajacic, G.; Varbanov, P.S.; Elhafyani, M.; Ziani, E. Optimal hybrid renewable energy design in autonomous system using Modified Electric System Cascade Analysis and Homer software. Energy Convers. Manag. 2016, 126, 909–922. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, G.; Li, Q.; You, Z.; Chen, W. Hierarchical energy management for PV/hydrogen/battery island DC microgrid. Int. J. Hydrog. Energy 2019, 44, 5507–5516. [Google Scholar] [CrossRef]
- Simulink Design Optimization Product Description-MATLAB & Simulink. Available online: https://www.mathworks.com/products/sl-design-optimization.html (accessed on 31 October 2018).
- Simulink-Simulation and Model-Based Design-MATLAB & Simulink. Available online: https://www.mathworks.com/products/simulink.html (accessed on 2 October 2018).
- Castañeda, M.; Cano, A.; Jurado, F.; Sánchez, H.; Fernández, L.M. Sizing optimization, dynamic modeling and energy management strategies of a stand-alone PV/hydrogen/battery-based hybrid system. Int. J. Hydrog. Energy 2013, 38, 3830–3845. [Google Scholar] [CrossRef]
- Cano, A.; Jurado, F.; Sánchez, H.; Fernández, L.M.; Castañeda, M. Optimal sizing of stand-alone hybrid systems based on PV/WT/FC by using several methodologies. J. Energy Inst. 2014, 87, 330–340. [Google Scholar] [CrossRef]
- Lata-García, J.; Reyes-Lopez, C.; Jurado, F.; Fernández-Ramírez, L.M.; Sanchez, H. Sizing optimization of a small hydro/photovoltaic hybrid system for electricity generation in Santay Island, Ecuador by two methods. In Proceedings of the 2017 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Pucon, Chile, 18–20 October 2017. [Google Scholar]
- Ministerio del Interior de España Dirección General de Tráfico. Available online: www.dgt.es (accessed on 11 October 2018).
- International Energy Agency. Global EV Outlook 2016; Int. Energy Agency: Paris, France, 2016. [Google Scholar]
- Consorcio de Transportes Bahía de Cádiz. Available online: http://www.cmtbc.es/ (accessed on 11 October 2018).
- FCH. New Bus Refuelling for European Hydrogen Bus Depots; CORDIS, European Commission: Luxemburg, 2016. [Google Scholar]
- AAE-Agencia Andaluza de la Energía Agencia Andaluza de la Energía. Mapa Eólico. Available online: https://www.agenciaandaluzadelaenergia.es/MapaEolico/index.jsp (accessed on 16 October 2018).
- Aksoy, H.; Toprak, Z.F.; Aytek, A.; Unal, N.E. Stochastic generation of hourly mean wind speed data. Renew. Energy 2004, 29, 2111–2131. [Google Scholar]
- Norwin MID-SIZED WIND TURBINES 29-Stall-200 KW. Available online: http://www.norwin.dk/Resources/NW29-stall-200kw_v002.pdf (accessed on 30 October 2018).
- Agencia Andaluza de Energía. Radiación Solar. Available online: https://www.agenciaandaluzadelaenergia.es/Radiacion/radiacion1.php (accessed on 19 October 2018).
- Manwell, J.F.; McGowan, J.G. Lead acid battery storage model for hybrid energy systems. Sol. Energy 1993, 50, 399–405. [Google Scholar] [CrossRef]
- Hoppecke Reserve Power Systems Optimal Environmental Compatibility-Closed Loop for Recovery of Materials in an Accredited Recycling System. Available online: https://www.hoppecke.com/fileadmin/Redakteur/Hoppecke-Main/Products/Downloads/OPzS_en.pdf (accessed on 30 October 2018).
- Hydrogenics Electrolyzer HySTAT TM-60-Technical Specifications; Hydrogenics: Mississauga, ON, Canada, 2014.
- How the Optimization Algorithm Formulates Minimization Problems-MATLAB & Simulink. Available online: https://www.mathworks.com/help/sldo/ug/how-the-optimization-algorithm-formulates-minimization-problems.html#bsjrcs0-1 (accessed on 3 October 2018).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| H2Lmin_set (kg) | NELE (units) | NTank (units) | H2Lmin (kg) | H2Lend | |
|---|---|---|---|---|---|
| % | kg | ||||
| 260 | 25.2 | 109.4 | 260.0 | 75.3 | 824.3 |
| 260 × 2 = 520 | 25.2 | 135.4 | 520.0 | 80.1 | 1084.0 |
| 260 × 3 = 780 | 25.2 | 161.4 | 780.0 | 83.3 | 1344.0 |
| 260 × 4 = 1040 | 25.0 | 187.9 | 1040.0 | 85.4 | 1605.0 |
| 260 × 5 = 1300 | 25.0 | 214.0 | 1300.0 | 87.1 | 1865.0 |
| H2Lmin_set (kg) | NELE | NTank | ||
|---|---|---|---|---|
| (units) | Error (%) | (units) | Error (%) | |
| 260 | 25.2 | 0.00 | 109.4 | 824.3 |
| 260 × 2 = 520 | 25.2 | 0.00 | 135.4 | 1084.0 |
| 260 × 3 = 780 | 25.2 | 0.00 | 161.4 | 1344.0 |
| 260 × 4 = 1040 | 25.0 | 0.80 | 187.9 | 1605.0 |
| 260 × 5 = 1300 | 25.0 | 0.80 | 214.0 | 1865.0 |
| NELE (units) | Ntank (units) | N_String (strings) | N_W (units) | P_PV (kW) |
|---|---|---|---|---|
| 24.0 | 104.0 | 37.1 | 7.5 | 2827.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez-Sáinz, H.; García-Vázquez, C.-A.; Llorens Iborra, F.; Fernández-Ramírez, L.M. Methodology for the Optimal Design of a Hybrid Charging Station of Electric and Fuel Cell Vehicles Supplied by Renewable Energies and an Energy Storage System. Sustainability 2019, 11, 5743. https://doi.org/10.3390/su11205743
Sánchez-Sáinz H, García-Vázquez C-A, Llorens Iborra F, Fernández-Ramírez LM. Methodology for the Optimal Design of a Hybrid Charging Station of Electric and Fuel Cell Vehicles Supplied by Renewable Energies and an Energy Storage System. Sustainability. 2019; 11(20):5743. https://doi.org/10.3390/su11205743
Chicago/Turabian StyleSánchez-Sáinz, Higinio, Carlos-Andrés García-Vázquez, Francisco Llorens Iborra, and Luis M. Fernández-Ramírez. 2019. "Methodology for the Optimal Design of a Hybrid Charging Station of Electric and Fuel Cell Vehicles Supplied by Renewable Energies and an Energy Storage System" Sustainability 11, no. 20: 5743. https://doi.org/10.3390/su11205743