

An Advanced Mode Switching Control Strategy for Extended-Range Concrete Mixer Trucks
Abstract
:
1. Introduction
2. Materials and Methods
2.1. The Powertrain of Extended-Range Concrete Mixer Trucks
2.1.1. Structure of the Powertrain
2.1.2. Operating Mode of the APU Powertrain
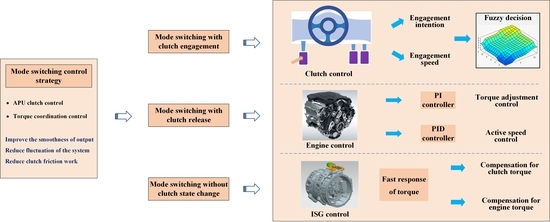
2.2. Control Strategy for Mode Switching Process
2.2.1. APU Clutch Control Strategy
2.2.2. Torque Coordination Control Strategy
2.3. APU Mode Switching Control Strategy
2.3.1. Mode Switching with Clutch Engagement
2.3.2. Clutch Disengagement Mode Switching Control Strategy
3. Results and Discussion
3.1. Simulation Verification
3.2. Experiment for Mode Switching Control Strategy
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Forrest, K.; Kinnon, M.M.; Tarroja, B.; Samuelsen, S. Estimating the technical feasibility of fuel cell and battery electric vehicles for the medium and heavy duty sectors in California. Appl. Energy 2020, 276, 115439. [Google Scholar] [CrossRef]
- Ying, H.; Fachao, J.; Haiming, X. Adaptive hierarchical energy management design for a novel hybrid powertrain of concrete truck mixers. J. Power Sources 2021, 509, 230325. [Google Scholar]
- Gallikova, D.B.; Caban, J. Maintenance system of semi-trailer and risk priority number. Arch. Automot. Eng.-Arch. Motoryz. 2019, 86, 101–109. [Google Scholar]
- Kim, D.M.; Lee, S.G.; Kim, D.K.; Park, M.R.; Lim, M.S. Sizing and optimization process of hybrid electric propulsion system for heavy-duty vehicle based on Gaussian process modeling considering traction motor characteristics. Renew. Sustain. Energy Rev. 2022, 161, 112286. [Google Scholar] [CrossRef]
- Skrzek, T.; Rucki, M.; Górski, K.; Matijošius, J.; Barta, D.; Caban, J.; Zarajczyk, J. Repeatability of High-Pressure Measurement in a Diesel Engine Test Bed. Sensors 2020, 20, 3478. [Google Scholar] [CrossRef]
- Chehrmonavari, H.; Kakaee, A.; Hosseini, S.E.; Desid-eri, U.; Tsatsaronis, G.; Floerchinger, G.; Braun, R.; Paykani, A. Hybridizing solid oxide fuel cells with internal combustion engines for power and propulsion systems: A review. Renew. Sustain. Energy Rev. 2023, 171, 112982. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, Z.X.; Hu, X.S.; Qian, W.; Li, Z. Trajectory Optimization-Based Auxiliary Power Unit Control Strategy for an Extended Range Electric Vehicle. IEEE Trans. Veh. Technol. 2017, 66, 10866–10874. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, S.L.; Li, K.; Fan, Z.W.; Xie, H.M.; Jiang, F.C. Multi-parameter adaptive online energy management strategy for concrete truck mixers with a novel hybrid powertrain considering vehicle mass. Energy 2023, 277, 127700. [Google Scholar] [CrossRef]
- Zhou, S.L.; Walker, P.; Tian, Y.; Zhang, N. Mode switching analysis and control for a parallel hydraulic hybrid vehicle. Veh. Syst. Dyn. 2021, 59, 928–948. [Google Scholar] [CrossRef]
- Yun, S.; Lee, K.; Yi, K. Development of a power management strategy to minimize the fuel consumption of a heavy-duty series hybrid electric vehicle. J. Mech. Sci. Technol. 2015, 29, 4399–4406. [Google Scholar] [CrossRef]
- Hong, J.L.; Gao, B.Z.; Yue, H.Q.; Chen, H. Dry Clutch Control of Two-Speed Electric Vehicles by Using an Optimal Control Scheme with Persistent Time-Varying Disturbance Rejection. IEEE Trans. Transp. Electrif. 2021, 7, 2034–2046. [Google Scholar] [CrossRef]
- Xiao, B.; Ruan, J.; Yang, W.; Walker, P.D.; Zhang, N. A review of pivotal energy management strategies for extended range electric vehicles. Renew. Sustain. Energy Rev. 2021, 149, 111194. [Google Scholar] [CrossRef]
- Lee, W.; Jeoung, H.; Park, D.; Kim, N. An Adaptive Concept of PMP-Based Control for Saving Operating Costs of Extended-Range Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 11505–11512. [Google Scholar] [CrossRef]
- Wang, J.J.; Cai, Y.F.; Chen, L.; Shi, D.H.; Wang, R.C.; Zhu, Z. Review on multi-power sources dynamic coordinated control of hybrid electric vehicle during driving mode transition process. Int. J. Energy Res. 2020, 44, 6128–6148. [Google Scholar] [CrossRef]
- Smith, A.; Bucknor, N.; Hong, Y.; He, Y. Controls Development for Clutch-Assisted Engine Starts in a Parallel Hybrid Electric Vehicle. In Proceedings of the SAE 2011 World Congress & Exhibition, Detroit, MI, USA, 12–14 April 2011. [Google Scholar] [CrossRef]
- Song, M.; Oh, J.H.; Kim, H. Engine clutch control algorithm during mode change for parallel hybrid electric vehicle. In Proceedings of the Vehicle Power and Propulsion Conference, Seoul, Republic of Korea, 9–12 October 2012. [Google Scholar]
- Chiang, C.J.; Chen, Y.C.; Lin, C.Y. Fuzzy sliding mode control for smooth mode changes of a parallel hybrid electric vehicle. In Proceedings of the IEEE International Conference on Control & Automation, Taichung, China, 18–20 June 2014. [Google Scholar]
- Oh, J.; Choi, S.B.; Chang, Y.J.; Eo, J.S. Engine clutch torque estimation for parallel-type hybrid electric vehicles. Int. J. Automot. Technol. 2017, 18, 125–135. [Google Scholar] [CrossRef]
- Tang, X.L.; Zhang, D.J.; Liu, T.; Khajepour, A.; Yu, H.S.; Wang, H. Research on the energy control of a dual-motor hybrid vehicle during engine start-stop process. Energy 2019, 166, 1181–1193. [Google Scholar] [CrossRef]
- Zhou, Z.W.; Guo, R.; Liu, X.Y. A disturbance-compensation-based sliding mode control scheme on mode switching condition for hybrid electric vehicles considering nonlinear backlash and stiffness. J. Vib. Control 2023, 29, 3823–3837. [Google Scholar] [CrossRef]
- Xu, X.Y.; Zhao, J.L.; Zhao, J.W.; Shi, K.; Dong, P.; Wang, S.H.; Liu, Y.F.; Guo, W.; Liu, X.W. Comparative study on fuel saving potential of series-parallel hybrid transmission and series hybrid transmission. Energy Convers. Manag. 2022, 252, 114970. [Google Scholar] [CrossRef]
- Chen, X.; Peng, D.; Wu, W.; Liu, H.; Zheng, X.J. Active Control of Torsional Vibration during Mode Switching of Hybrid Powertrain Based on Adaptive Model Reference. Machines 2022, 10, 647. [Google Scholar] [CrossRef]
- Li, H.Z.; Zhang, G. Design of a versatile test bench for hybrid electric vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008. [Google Scholar]
- Chasse, A.; Sciarretta, A. Supervisory control of hybrid powertrains: An experimental benchmark of offline optimization and online energy management. Control Eng. Pract. 2011, 19, 1253–1265. [Google Scholar] [CrossRef]
- Lin, Y.; Qin, D.; Liu, Y.; Yang, Y. Control strategy for all the mode-switches of hybrid electric vehicle. Adv. Mech. Eng. 2016, 8, 1687814016681233. [Google Scholar] [CrossRef]
- Vafaeipour, M.; El Baghdadi, M.; Verbelen, F.; Sergeant, P.; Van Mierlo, J.; Hegazy, O. Experimental Implementation of Power-Split Control Strategies in a Versatile Hardware-in-the-Loop Laboratory Test Bench for Hybrid Electric Vehicles Equipped with Electrical Variable Transmission. Appl. Sci. 2020, 10, 4253. [Google Scholar] [CrossRef]
- Song, D.F.; Wu, J.J.; Yang, D.P.; Chen, H.X.; Zeng, X.H. An active multiobjective real-time vibration control algorithm for parallel hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2023, 237, 21–33. [Google Scholar] [CrossRef]
- Zou, K.; Luo, W.; Lu, Z. Real-Time Energy Management Strategy of Hydrogen Fuel Cell Hybrid Electric Vehicles Based on Power Following Strategy–Fuzzy Logic Control Strategy Hybrid Control. World Electr. Veh. J. 2023, 14, 315. [Google Scholar] [CrossRef]
- Pan, Y.N.; Li, Q.; Liang, H.J.; Lam, H.K. A Novel Mixed Control Approach for Fuzzy Systems via Membership Functions Online Learning Policy. IEEE Trans. Fuzzy Syst. 2022, 30, 3812–3822. [Google Scholar] [CrossRef]
- Aravind, R.V.; Balasubramaniam, P. Membership-Function-Dependent Design of Quantized Fuzzy Sampled-Data Controller for Semi-Markovian Jump Systems with Actuator Faults. IEEE Trans. Fuzzy Syst. 2023, 31, 40–52. [Google Scholar] [CrossRef]
- Multani, M.; Ren, J.; Sood, V.K. Fuzzy logic (FL) controlled HVDC system-influence of shape, width & distribution of membership functions (MFs). In Proceedings of the CCECE 2010, Calgary, AB, Canada, 2–5 May 2010; pp. 1–7. [Google Scholar]
- Zhao, J.; Bose, B.K. Evaluation of membership functions for fuzzy logic controlled induction motor drive. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society, IECON 02, Seville, Spain, 5–8 November 2002; pp. 229–234. [Google Scholar]
- Prasad, K.A.; Nair, U.; Unnikrishnan, A. Fuzzy sliding mode control of a Permanent Magnet Synchronous Motor with two different fuzzy membership functions. In Proceedings of the 2015 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 9–11 December 2015; pp. 1–6. [Google Scholar]
- Moness, M.; Mahmoud, D.; Hussein, A. Real-time Mamdani-like fuzzy and fusion-based fuzzy controllers for balancing two-wheeled inverted pendulum. J. Ambient. Intell. Humaniz. Comput. 2020, 13, 3577–3593. [Google Scholar] [CrossRef]
- Chu, D.F.; Li, H.R.; Zhao, C.Y.; Zhou, T.Q. Trajectory Tracking of Autonomous Vehicle Based on Model Predictive Control with PID Feedback. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2239–2250. [Google Scholar] [CrossRef]
- Shamseldin, M.A. Design of Auto-Tuning Nonlinear PID Tracking Speed Control for Electric Vehicle with Uncertainty Consideration. World Electr. Veh. J. 2023, 14, 78. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameters | Values |
|---|---|---|
| Vehicle mass | Curb mass | 15,000 kg |
| Gross mass | 40,000 kg | |
| Transmission system | Efficiency | 0.93 |
| Battery | Capacity | 300 Ah |
| Engine | Maximum power | 125 kW |
| Maximum speed | 2800 rpm | |
| Motor | Maximum power | 350 kW |
| Maximum speed | 3000 rpm | |
| ISG | Maximum power | 130 kW |
| Maximum speed | 3000 rpm |
| Control Strategy | Switching Time (s) | Friction Work (J) | Max Torque Deviation (N·m) |
|---|---|---|---|
| Engine idle start process | 0.94 | 19,068.4 | 23.1 |
| Engine target speed start | 0.82 | 24,051.6 | 391.3 |
| Control Strategy | Switching Time (s) | Max Speed Deviation (rpm) | Max Torque Deviation (N·m) |
|---|---|---|---|
| Torque coordination control | 0.33 | 2 | 19.8 |
| Without torque coordinate control | 0.18 | 28 | 348.2 |
| Method | Switching Time (s) | Decrease in Speed Deviation | Decrease in Torque Deviation |
|---|---|---|---|
| The proposed mode-switching strategy | 0.98 | 92.6% | 94.3% |
| Active control of torsional vibration [22] | 1.2 | 79.6% | 77.4% |
| Rule-based control strategy [25] | 0.5 | 71.7% (Decrease in maximum impact) | 68.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zeng, Y.; Huang, Y.; Xie, H.; Wang, G.; Jiang, F. An Advanced Mode Switching Control Strategy for Extended-Range Concrete Mixer Trucks. World Electr. Veh. J. 2024, 15, 40. https://doi.org/10.3390/wevj15020040
Wang S, Zeng Y, Huang Y, Xie H, Wang G, Jiang F. An Advanced Mode Switching Control Strategy for Extended-Range Concrete Mixer Trucks. World Electric Vehicle Journal. 2024; 15(2):40. https://doi.org/10.3390/wevj15020040
Chicago/Turabian StyleWang, Shilong, Yufei Zeng, Ying Huang, Haiming Xie, Guoye Wang, and Fachao Jiang. 2024. "An Advanced Mode Switching Control Strategy for Extended-Range Concrete Mixer Trucks" World Electric Vehicle Journal 15, no. 2: 40. https://doi.org/10.3390/wevj15020040